Спосіб визначення місцеположення об’єктів у двовимірному просторі
Номер патенту: 98316
Опубліковано: 27.04.2015
Автори: Савочкін Дмитро Олександрович, Гімпілевич Юрій Борисович


Формула / Реферат
Спосіб визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації і просторової локалізації, яка складається зі зчитувача, набору антен, блока локалізації та набору радіоміток, розташованих на об'єктах локалізації, який полягає в тому, що результуючу точкову оцінку місцеположення радіомітки та відповідного об'єкта локалізації в області локалізації формують за допомогою декількох алгоритмів локалізації шляхом обробки вимірювальної інформації двох або більше видів, отриманої при почерговому випромінюванні запитальних сигналів з двома або більше рівнями потужності, який відрізняється тим, що результуючу точкову оцінку місцеположення радіомітки обчислюють як середнє зважене шістнадцяти або більше точкових оцінок місцеположення радіомітки, сформованих двома або більше точковими алгоритмами локалізації в ході обробки вимірювальної інформації двох або більше видів, отриманої при випромінюванні запитальних сигналів на двох або більше частотах при використанні двох або більше рівнів потужності випромінювання, при цьому вагові коефіцієнти для обчислення середнього зваженого точкових оцінок місцеположення радіомітки мають сенс ймовірностей знаходження радіомітки в кожній з точок простору, відповідних даним точковим оцінкам місцеположення радіомітки, та обчислюють шляхом проведення інтерполяції, причому як вузлові точки інтерполяції використовують результуючі зонні оцінки місцеположення радіомітки, що мають сенс ймовірностей знаходження радіомітки у зонах локалізації, на які попередньо розбивають область локалізації, та обчислюють шляхом перемноження шістнадцяти або більше зонних оцінок місцеположення радіомітки, сформованих двома або більше зонними алгоритмами локалізації в ході обробки вимірювальної інформації двох або більше видів, отриманої при випромінюванні запитальних сигналів на двох або більше частотах при використанні двох або більше рівнів потужності випромінювання.
Текст
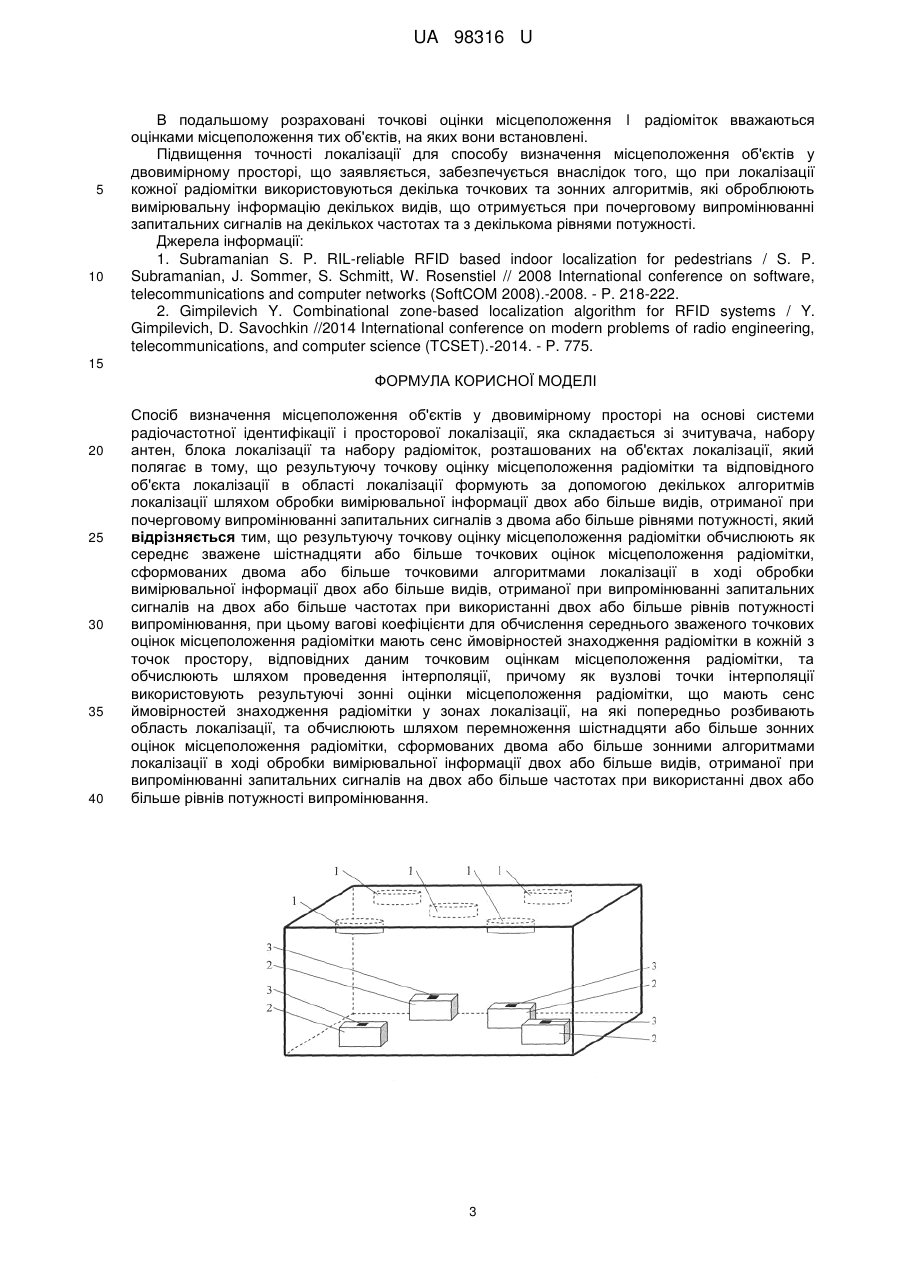
Реферат: Спосіб визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації і просторової локалізації, яка складається зі зчитувача, набору антен, блока локалізації та набору радіоміток, розташованих на об'єктах локалізації, який полягає в тому, що результуючу точкову оцінку місцеположення радіомітки та відповідного об'єкта локалізації в області локалізації формують за допомогою декількох алгоритмів локалізації шляхом обробки вимірювальної інформації двох або більше видів, отриманої при почерговому випромінюванні запитальних сигналів з двома або більше рівнями потужності. Результуючу точкову оцінку місцеположення радіомітки обчислюють як середнє зважене шістнадцяти або більше точкових оцінок місцеположення радіомітки сформованих двома або більше точковими алгоритмами локалізації в ході обробки вимірювальної інформації двох або більше видів, отриманої при випромінюванні запитальних сигналів на двох або більше частотах при використанні двох або більше рівнів потужності випромінювання. Вагові коефіцієнти для обчислення середнього зваженого точкових оцінок місцеположення радіомітки мають сенс ймовірностей знаходження радіомітки в кожній з точок простору, відповідних даним точковим оцінкам місцеположення радіомітки, та обчислюють шляхом проведення інтерполяції. Як вузлові точки інтерполяції використовують результуючі зонні оцінки місцеположення радіомітки, що мають сенс ймовірностей знаходження радіомітки у зонах локалізації, на які попередньо розбивають область локалізації та обчислюють шляхом перемноження шістнадцяти або більше зонних оцінок місцеположення радіомітки, сформованих двома або більше зонними алгоритмами локалізації в ході обробки вимірювальної інформації двох або більше видів, отриманої при випромінюванні запитальних сигналів на двох або більше частотах при використанні двох або більше рівнів потужності випромінювання. UA 98316 U (12) UA 98316 U UA 98316 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області радіонавігації та радіолокації, а саме до способів визначення місцеположення об'єктів у двовимірному просторі за допомогою встановлених на них радіоміток, і передбачається до використання в системах радіочастотної ідентифікації та просторової локалізації. Корисна модель може застосовуватися для визначення місцеположення рухомих і нерухомих об'єктів як на відкритих просторах, так і в закритих приміщеннях. З існуючого рівня техніки відомий спосіб визначення місцеположення об'єктів на основі вимірювальної інформації у вигляді рівнів потужності сигналів відповіді і коефіцієнтів відповіді радіоміток [1]. При реалізації даного способу оцінки місцеположення об'єктів формуються одним алгоритмом локалізації, а запитальні сигнали випромінюються на одній частоті з використанням одного рівня потужності. Це призводить до малої точності визначення місцеположення об'єктів, особливо в тих випадках, коли алгоритм локалізації вибраний не оптимально. Такий недолік значною мірою усувається при використанні комбінованого способу визначення місцеположення об'єктів з використанням декількох зонних алгоритмів локалізації [2], який є найбільш близьким аналогом по технічній суті до способу визначення місцеположення об'єктів у двовимірному просторі, що заявляється. При реалізації даного комбінованого способу у системах радіочастотної ідентифікації і просторової локалізації проводять обробку вимірювальної інформації різних видів, що отримується при випромінюванні запитальних сигналів з різними рівнями потужності. Однак даний спосіб не дозволяє використовувати точкові алгоритми локалізації і не враховує можливість випромінювання запитальних сигналів на різних частотах, що є недоліком, який призводить до недостатньої точності визначення місцеположення об'єктів. Задачею корисної моделі, що заявляється, є створення високоточного способу визначення місцеположення об'єктів у двовимірному просторі. Поставлена задача вирішується наступним чином. У способі визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації і просторової локалізації, яка складається зі зчитувача, набору антен, блока локалізації та набору радіоміток, розташованих на об'єктах локалізації, який полягає в тому, що результуюча точкова оцінка місцеположення радіомітки та відповідного об'єкта локалізації в області локалізації формується за допомогою декількох алгоритмів локалізації шляхом обробки вимірювальної інформації двох або більше видів, отриманої при почерговому випромінюванні запитальних сигналів з двома або більше рівнями потужності, згідно з корисною моделлю, результуюча точкова оцінка місцеположення радіомітки обчислюється як середнє зважене шістнадцяти або більше точкових оцінок місцеположення радіомітки, сформованих двома або більше точковими алгоритмами локалізації в ході обробки вимірювальної інформації двох або більше видів, отриманої при випромінюванні запитальних сигналів на двох або більше частотах при використанні двох або більше рівнів потужності випромінювання, при цьому вагові коефіцієнти для обчислення середнього зваженого точкових оцінок місцеположення радіомітки мають сенс ймовірностей знаходження радіомітки в кожній з точок простору відповідних даним точковим оцінкам місцеположення радіомітки та обчислюються шляхом проведення інтерполяції, причому як вузлові точки інтерполяції використовуються результуючі зонні оцінки місцеположення радіомітки, що мають сенс ймовірностей знаходження радіомітки у зонах локалізації, на які попередньо розбивається область локалізації, та обчислюються шляхом перемноження шістнадцяті або більше зонних оцінок місцеположення радіомітки, сформованих двома або більше зонними алгоритмами локалізації в ході обробки вимірювальної інформації двох або більше видів, отриманої при випромінюванні запитальних сигналів на двох або більше частотах при використанні двох або більше рівнів потужності випромінювання. Технічним результатом корисної моделі є підвищення точності визначення місцеположення об'єктів у двовимірному просторі. Суть корисної моделі пояснена кресленням. На кресленні представлено приклад схеми розташування антен зчитувача, радіоміток та об'єктів локалізації в деякому приміщенні. Спосіб визначення місцеположення об'єктів у двовимірному просторі, що заявляється, передбачається до використання в системах радіочастотної ідентифікації і просторової локалізації, що складаються з блока локалізації, набору радіоміток, розташованих на об'єктах, і зчитувача, який включає в себе набір антен. На кресленні представлений приклад схеми розташування антен 1 зчитувача та об'єктів локалізації 2, на яких розміщені радіомітки 3, в деякому приміщенні. Суть способу визначення місцеположення об'єктів у двовимірному просторі, що заявляється, полягає в наступному. Блок локалізації системи радіочастотної ідентифікації та просторової локалізації приймає запит користувача про початок роботи системи і посилає 1 UA 98316 U 5 10 15 20 25 30 команду пошуку радіоміток зчитувачу. За цією командою зчитувач виконує почергову відправку запитальних сигналів деякої потужності на деякій частоті за допомогою кожної зі своїх антен. Радіомітки у разі успішного прийому запитального сигналу від антени зчитувача виконують відправлення сигналів відповіді. Зчитувач приймає сигнали відповіді від радіоміток, причому прийом кожного сигналу відповіді здійснюється за допомогою тієї антени, за допомогою якої виконувалася відправка запитального сигналу, що викликав відповідь радіомітки. Вищеописаний процес відправки запитальних сигналів деякої потужності на деякій частоті та прийому сигналів відповіді повторюється деяке кінцеве число разів. Після цього для кожної радіомітки, сигнали відповіді від якої прийняті за допомогою антен зчитувача хоча б один раз, формуються масиви вимірювальної інформації двох або більше видів (наприклад, видів рівнів потужності сигналів відповіді радіоміток, коефіцієнтів відповіді радіоміток, часової затримки сигналів відповіді радіоміток тощо). Сформовані масиви вимірювальної інформації оброблюються двома або більше точковими алгоритмами локалізації (результатом роботи кожного з яких є оцінка місцеположення радіомітки у вигляді точці у двовимірному просторі області локалізації) та двома або більше зонними алгоритмами локалізації (результатом роботи кожного з яких є оцінка місцеположення радіомітки у вигляді вектора ймовірностей знаходження радіомітки у кожній з зон локалізації, на які поділено область локалізації). У результаті цього для кожної радіомітки розраховуються чотири або більше точкові оцінки місцеположення (по одній для кожної комбінації точкового алгоритму локалізації та виду вимірювальної інформації) та чотири або більше зонні оцінки місцеположення (по одній для кожної комбінації зонного алгоритму локалізації та виду вимірювальної інформації), які зберігаються у системі. Описаний вище процес, що включає багаторазову відправку запитальних сигналів, прийом сигналів відповіді, формування масивів вимірювальної інформації, розрахунок точкових і зонних оцінок місцеположення радіоміток та збереження їх у системі повторюється для двох або більше рівнів потужності запитальних сигналів та двох або більше частот запитальних сигналів. По закінченні цього для кожної радіомітки, сигнали відповіді від якої прийняті за допомогою антен зчитувача хоча б один раз, в системі зберігається шістнадцять або більше точкових оцінок місцеположення (по одній для кожної комбінації точкового алгоритму локалізації, виду вимірювальної інформації, рівня потужності запитальних сигналів та частоти запитальних сигналів) та шістнадцять або більше зонних оцінок місцеположення (по одній для кожної комбінації зонного алгоритму локалізації, виду вимірювальної інформації, рівня потужності запитальних сигналів та частоти запитальних сигналів). Після цього для кожної радіомітки формується результуюча точкова оцінка місцеположення l у двовимірному просторі області локалізації згідно з наступним виразом: l 1 I J M F I J M F p(li, j,m,f )li,j,m,f , p(li, j,m,f ) i1 j1m1f 1 35 40 45 i1 j1m1 f 1 (1) де l - кількість видів вимірювальної інформації, що використовуються; J - кількість точкових алгоритмів, що використовуються; M - кількість рівнів потужності, з якими проводиться випромінювання запитальних сигналів; F - кількість частот, на яких проводиться випромінювання запитальних сигналів; li, j,m,f - точкова оцінка місцеположення радіомітки, сформована 7-м точковим алгоритмом у ході обробки вимірювальної інформації і-го виду, отриманої при випромінюванні запитальних сигналів на f-й частоті з m-м рівнем потужності; p(li, j,m,f ) l - ймовірність знаходження радіомітки у точці i, j,m,f , що розраховується шляхом інтерполяції значень результуючих зонних оцінок p z місцеположення радіомітки, які обчислюються відповідно до формули I K M F p z pi,k,m,f ,z i1 k 1m1f 1 50 , (2) де K - кількість зонних алгоритмів, що використовуються; pi,k,m,f ,z - ймовірність знаходження радіомітки у z-й зоні локалізації, сформована k-м зонним алгоритмом у ході обробки вимірювальної інформації і-го виду, отриманої при випромінюванні запитальних сигналів на f-й частоті з m-м рівнем потужності. 2 UA 98316 U 5 10 В подальшому розраховані точкові оцінки місцеположення l радіоміток вважаються оцінками місцеположення тих об'єктів, на яких вони встановлені. Підвищення точності локалізації для способу визначення місцеположення об'єктів у двовимірному просторі, що заявляється, забезпечується внаслідок того, що при локалізації кожної радіомітки використовуються декілька точкових та зонних алгоритмів, які оброблюють вимірювальну інформацію декількох видів, що отримується при почерговому випромінюванні запитальних сигналів на декількох частотах та з декількома рівнями потужності. Джерела інформації: 1. Subramanian S. P. RIL-reliable RFID based indoor localization for pedestrians / S. P. Subramanian, J. Sommer, S. Schmitt, W. Rosenstiel // 2008 International conference on software, telecommunications and computer networks (SoftCOM 2008).-2008. - P. 218-222. 2. Gimpilevich Y. Combinational zone-based localization algorithm for RFID systems / Y. Gimpilevich, D. Savochkin //2014 International conference on modern problems of radio engineering, telecommunications, and computer science (TCSET).-2014. - P. 775. 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 40 Спосіб визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації і просторової локалізації, яка складається зі зчитувача, набору антен, блока локалізації та набору радіоміток, розташованих на об'єктах локалізації, який полягає в тому, що результуючу точкову оцінку місцеположення радіомітки та відповідного об'єкта локалізації в області локалізації формують за допомогою декількох алгоритмів локалізації шляхом обробки вимірювальної інформації двох або більше видів, отриманої при почерговому випромінюванні запитальних сигналів з двома або більше рівнями потужності, який відрізняється тим, що результуючу точкову оцінку місцеположення радіомітки обчислюють як середнє зважене шістнадцяти або більше точкових оцінок місцеположення радіомітки, сформованих двома або більше точковими алгоритмами локалізації в ході обробки вимірювальної інформації двох або більше видів, отриманої при випромінюванні запитальних сигналів на двох або більше частотах при використанні двох або більше рівнів потужності випромінювання, при цьому вагові коефіцієнти для обчислення середнього зваженого точкових оцінок місцеположення радіомітки мають сенс ймовірностей знаходження радіомітки в кожній з точок простору, відповідних даним точковим оцінкам місцеположення радіомітки, та обчислюють шляхом проведення інтерполяції, причому як вузлові точки інтерполяції використовують результуючі зонні оцінки місцеположення радіомітки, що мають сенс ймовірностей знаходження радіомітки у зонах локалізації, на які попередньо розбивають область локалізації, та обчислюють шляхом перемноження шістнадцяти або більше зонних оцінок місцеположення радіомітки, сформованих двома або більше зонними алгоритмами локалізації в ході обробки вимірювальної інформації двох або більше видів, отриманої при випромінюванні запитальних сигналів на двох або більше частотах при використанні двох або більше рівнів потужності випромінювання. 3 UA 98316 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюHimpelevych Yurii Borysovych, Savochkin Dmytro Oleksandrovych
Автори російськоюГимпилевич Юрий Борисович, Савочкин Дмитрий Александрович
МПК / Мітки
МПК: G01S 13/75
Мітки: спосіб, визначення, місцеположення, просторі, об'єктів, двовимірному
Код посилання
<a href="https://ua.patents.su/6-98316-sposib-viznachennya-miscepolozhennya-obehktiv-u-dvovimirnomu-prostori.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місцеположення об’єктів у двовимірному просторі</a>
Спосіб визначення місцеположення об’єктів у двовимірному просторі
Номер патенту: 87461
Опубліковано: 10.02.2014
Автори: Савочкін Дмитро Олександрович, Гімпілевич Юрій Борисович
МПК: G01S 13/75
Мітки: об'єктів, двовимірному, спосіб, просторі, місцеположення, визначення
Формула / Реферат:
Спосіб визначення місцеположення об'єктів у двовимірному просторі, який полягає в тому, що для системи радіочастотної локалізації в двовимірному просторі, що складається з блока локалізації, набору радіоміток, розташованих на об'єктах в зоні локалізації, і зчитувача, що включає в себе набір антен, в блоці локалізації для кожної радіомітки формується оцінка її місцеположення, при цьому кожна така оцінка формується як результат виконання...
Спосіб визначення місцеположення об’єктів у двовимірному просторі
Номер патенту: 107886
Опубліковано: 25.02.2015
Автори: Гімпілевич Юрій Борисович, Савочкін Дмитро Олександрович
МПК: G01S 13/75, G01S 5/04
Мітки: місцеположення, двовимірному, спосіб, визначення, просторі, об'єктів
Формула / Реферат:
Спосіб визначення місцеположення об'єктів у двовимірному просторі на основі системи радіочастотної ідентифікації та просторової локалізації, яка складається зі зчитувача, набору з антен, блока локалізації та набору радіоміток з унікальними ідентифікаторами, що розміщуються на об'єктах локалізації, розташованих в зоні локалізації, який полягає в тому, що послідовно...
Спосіб визначення місцеположення об’єктів
Номер патенту: 87459
Опубліковано: 10.02.2014
Автори: Савочкін Дмитро Олександрович, Гімпілевич Юрій Борисович
МПК: G01S 5/04
Мітки: визначення, місцеположення, об'єктів, спосіб
Формула / Реферат:
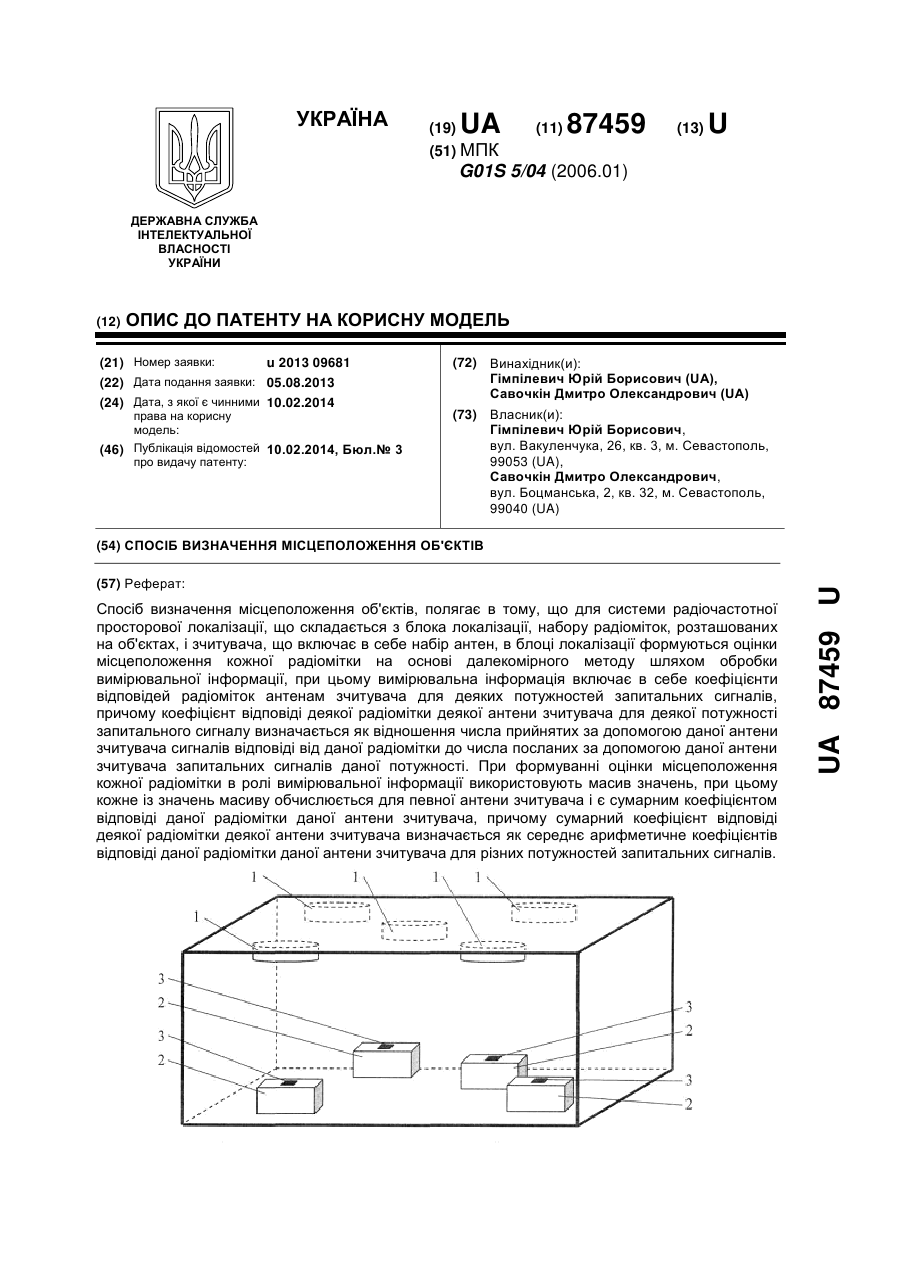
Спосіб визначення місцеположення об'єктів, який полягає в тому, що для системи радіочастотної просторової локалізації, що складається з блока локалізації, набору радіоміток, розташованих на об'єктах, і зчитувача, що включає в себе набір антен, в блоці локалізації формуються оцінки місцеположення кожної радіомітки на основі далекомірного методу шляхом обробки вимірювальної інформації, при цьому вимірювальна інформація включає в себе...
Спосіб визначення місцеположення літального апарата
Номер патенту: 49076
Опубліковано: 12.04.2010
Автори: Слєпов Лев Іванович, Герасименко Володимир Вікторович, Щипанський Павло Володимирович, Блаженний Валерій Іванович
МПК: G01S 5/10
Мітки: літального, місцеположення, спосіб, апарата, визначення
Формула / Реферат:
Спосіб визначення місцеположення літального апарата, при якому визначають місцеположення літального апарата за допомогою використання оглядового радіолокатора, який відрізняється тим, що додатково отримують інформацію про координати місцеположення літального апарата за допомогою двох і більше оглядових радіолокаторів та оцінюють за допомогою формули,і...
Спосіб визначення місцеположення свищів у виробах
Номер патенту: 27486
Опубліковано: 12.11.2007
Автори: Бабак Віталій Павлович, Пономаренко Олександр Васильович, Філоненко Сергій Федорович
МПК: G01N 29/14, G01M 3/00, G01N 29/00, F17D 5/02
Мітки: визначення, свищів, виробах, спосіб, місцеположення
Формула / Реферат:
Спосіб визначення місцеположення свищів у виробах, що включає встановлення на об'єкті контролю двох датчиків, реєстрацію сигналів акустичної емісії з одночасним вимірюванням їх характеристик, за якими визначають місцеположення свищів, який відрізняється тим, що як вищезгадані характеристики використовують положення в часі енергетичного центра ваги пікового сигналу у взаємній кореляційній функції, за яким визначають місцеположення свища у...
Попередній патент: Дисковий різальний апарат
Наступний патент: Вертикальний механічний прес
Випадковий патент: Спосіб електрохімічної очистки стічних вод