Магнітострикційний пристрій для контролю рівня рідинних середовищ
Номер патенту: 98707
Опубліковано: 12.05.2015
Автори: Рябіченко Антон Вікторович, Шаповалов Олексій Іванович, Стенцель Йосип Іванович, Проказа Олена Іванівна
Формула / Реферат
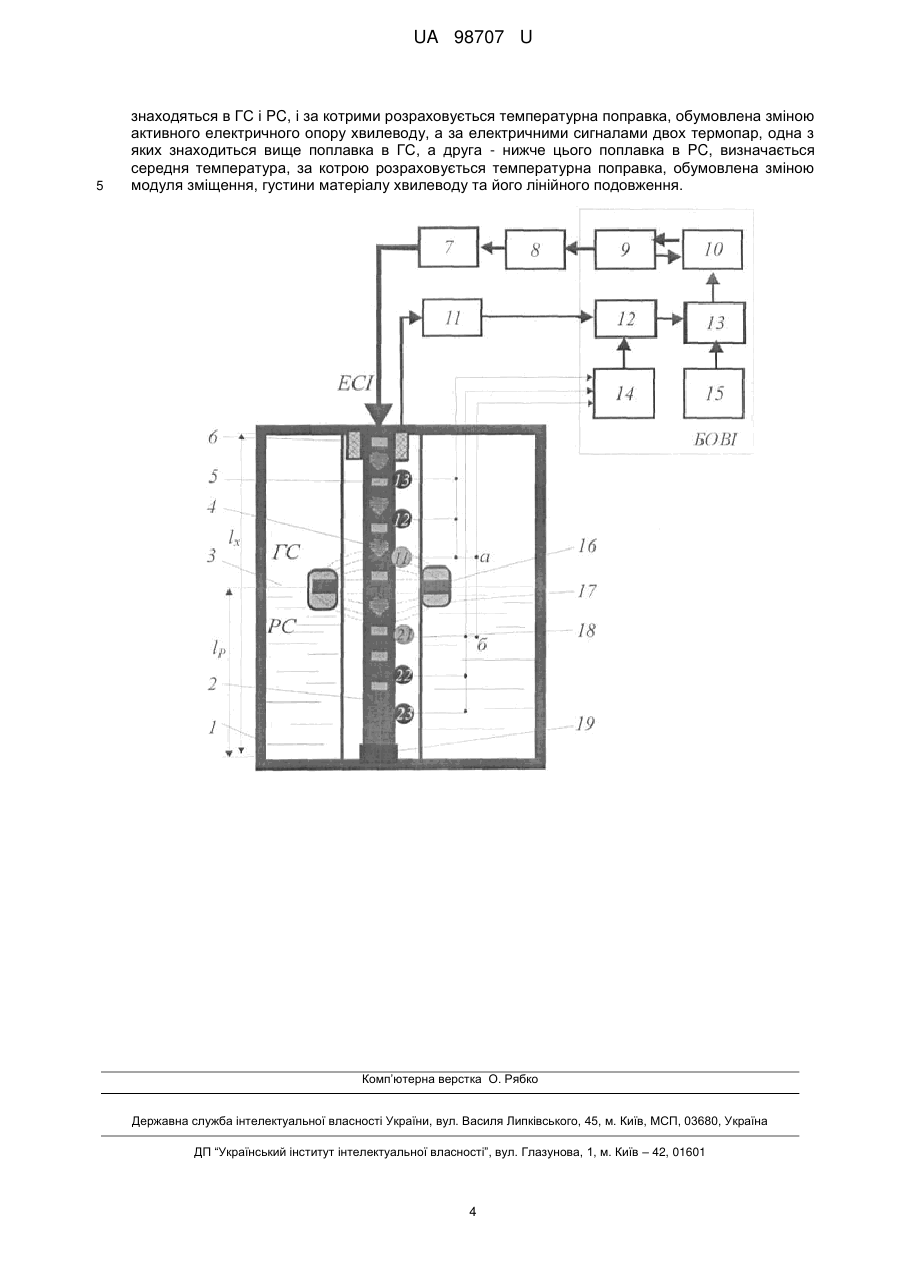
Магнітострикційний пристрій (МСПр) для вимірювання рівня рідинних середовищ (PC), який здійснюється за принципом визначення часу проходження електричним струмовим імпульсом (ЕСІ) відстані від місця його подачі до електромагнітного перетворювача (ЕМП), котрий являє собою плаваючий на поверхні PC поплавок з постійним магнітом, і ультразвукового торсійного імпульсу (УЗТІ) від ЕМП до приймача цього імпульсу, а вплив зміни температури PC здійснюється за рахунок розміщення давачів температури вздовж хвилеводу, за котрими розраховується середня температура PC, і включає послідовно з'єднані генератор ЕСІ, хвилевід, плаваючий на поверхні PC поплавок з постійним магнітом, приймач УЗТІ, підсилювач, мікроконтролер, лічильник тактових імпульсів і блок обробки вимірювальної інформації (БОВІ), який відрізняється тим, що всередині захисної трубки МСПр уставлені термопари вздовж хвилеводу таким чином, що частина з них знаходиться в газовому середовищі (ГС), а частина в PC, за значеннями котрих визначаються середні температури частин хвилеводу, які знаходяться в ГС і PC, і за котрими розраховується температурна поправка, обумовлена зміною активного електричного опору хвилеводу, а за електричними сигналами двох термопар, одна з яких знаходиться вище поплавка в ГС, а друга - нижче цього поплавка в PC, визначається середня температура, за котрою розраховується температурна поправка, обумовлена зміною модуля зміщення, густини матеріалу хвилеводу та його лінійного подовження.
Текст
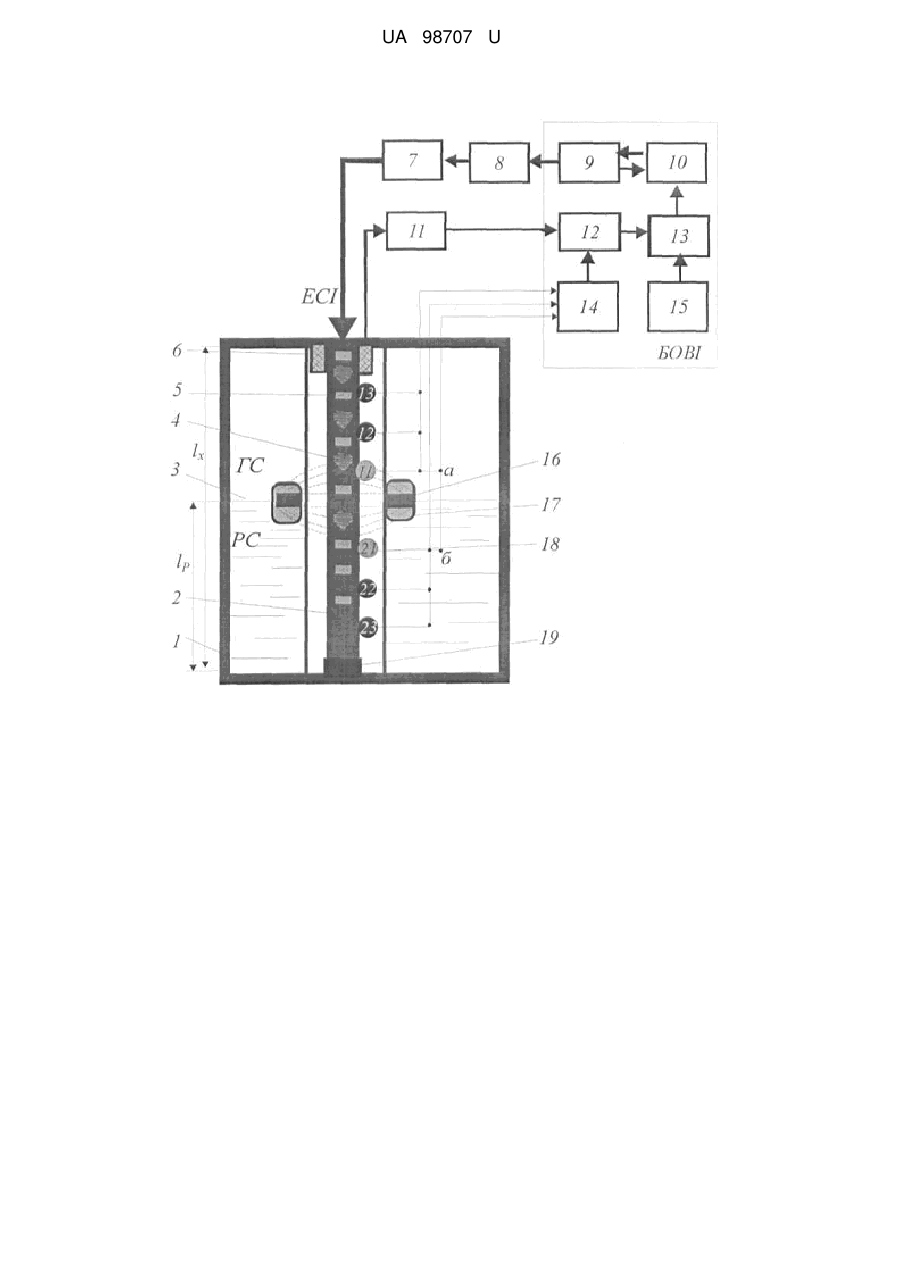
Реферат: Магнітострикційний пристрій (МСПр) для вимірювання рівня рідинних середовищ (PC), який здійснюється за принципом визначення часу проходження електричним струмовим імпульсом (ЕСІ) відстані від місця його подачі до електромагнітного перетворювача (ЕМП), котрий являє собою плаваючий на поверхні PC поплавок з постійним магнітом, і ультразвукового торсійного імпульсу (УЗТІ) від ЕМП до приймача цього імпульсу, а вплив зміни температури PC здійснюється за рахунок розміщення давачів температури вздовж хвилеводу, за котрими розраховується середня температура PC, і включає послідовно з'єднані генератор ЕСІ, хвилевід, плаваючий на поверхні PC поплавок з постійним магнітом, приймач УЗТІ, підсилювач, мікроконтролер, лічильник тактових імпульсів і блок обробки вимірювальної інформації (БОВІ). Всередині захисної трубки МСПр уставлені термопари вздовж хвилеводу таким чином, що частина з них знаходиться в газовому середовищі (ГС), а частина в PC, за значеннями котрих визначаються середні температури частин хвилеводу, які знаходяться в ГС і PC, і за котрими розраховується температурна поправка, обумовлена зміною активного електричного опору хвилеводу, а за електричними сигналами двох термопар, одна з яких знаходиться вище поплавка в ГС, а друга - нижче цього поплавка в PC, визначається середня температура, за котрою розраховується температурна поправка, обумовлена зміною модуля зміщення, густини матеріалу хвилеводу та його лінійного подовження. UA 98707 U (12) UA 98707 U UA 98707 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до вимірювальної техніки і може бути використана для контролю рівня рідинних середовищ (PC) у хімічній, нафтовій, енергетичній, фармацевтичній, металургійній та інших галузях промисловості. Відомий магнітострикційний рівнемір [Siemens. Контрольно-измерительные приборы. Уровень. Каталог F1 01 2007. 188 с.], в якому для зменшення похибок вимірювального контролю встановлено два феромагнітних хвилеводи (робочий і допоміжний) з різними фізичними параметрами. Хвилеводи закріплені демпферами. Вздовж хвилеводу рухається поплавок з робочим постійним магнітом, а другий постійний магніт, який розташований біля нижнього демпфера, є нерухомим. Блок обчислення та управління, котрий складається з генератора електричних струмових імпульсів (ЕСІ), підсилювачів, блока управління та блока обчислення, з'єднаний з магнітострикційним перетворювачем. Принцип роботи цього засобу вимірювання полягає в тому, що визначення рівня, температури та маси PC виконується за часом проходження ЕСІ у кожному з хвилеводів за їх фізичними параметрами. До недоліків таких магнітострикційних рівнемірів належить складність визначення температури PC від зміни фізичних параметрів хвилеводів, а також нерівномірність розподілення температурної похибки вздовж діапазону вимірювального контролю (ДВК). Відомий ультразвуковий рівнемір [Ultrasonic sensor [Електронний ресурс] /Pepperl+Fuchs GmbH. - M.: ProSoft, 2002. - (Pepperl+Fuchs. Product Catalog 04/2002) - 1 електрон, опт. диск (CDROM): кольор.; 12 см. - Систем, вимоги: Windows 95/98/ME//NT4/2000/XP/VISTA. Acrobat Reader. - Назва з титул, екрану], у котрого для зменшення впливу температури на результат вимірювального контролю використовуються давачі температури. За допомогою термометра, який розташований в ємності, визначається температура, за котрою розраховується швидкість розповсюдження ультразвукового імпульсу в газовому середовищі (ГС), а за визначеною швидкістю знаходиться рівень рідини. До основних недоліків таких рівнемірів належать наступні: так як давач температури розташовується в місці розміщення ультразвукового випромінювача, то він вимірює деяку температуру біля цього випромінювача і не враховує розподілення температури по висоті ГС; такий спосіб не враховує вплив температури на фізичні параметри PC. Найбільш близьким запропонованій корисній моделі є магнітострикційний рівнемір [Каталог "Уровнемеры" серии номенклатурных каталогов компании Emerson Process Management и Промышленной группы "Метран". Выпуск 10/2011. - 206 с.]. Вимірювання рівня PC здійснюється за принципом визначення часу проходження ультразвукового торсійного імпульсу (УЗТІ) по хвилеводу від магніту, який розташований в плаваючому на поверхні PC поплавку, до приймача УЗТІ, котрий розміщений на вході хвилеводу. Значення рівня lP PC визначається у блоці обробки вимірювальної інформації (БОВІ) за формулою lP=tPv (1), де tp – вимірюваний час проходження УЗТІ відстані від поплавка до його приймача. Для даного матеріалу хвилеводу приймається, що швидкість ν руху ЕСІ та УЗТІ є сталою, a v G (2) де G, p- модуль зміщення і питома густина матеріалу хвилеводу відповідно. Формула (1) справедлива тільки для нормальних умов, котрі відповідають умовам калібрування магнітострикційного пристрою (МСПр). Так як основним впливовим параметром є температура ТС контрольованого середовища, то відхилення її від нормальної T0 приводить до появи температурної похибки за рахунок того, що при зміні температури ТС змінюється такі параметри хвилеводу: - електричний опір на величину ΔRxT=Rx0αT(TC-T0) (3); де Rx0, αT - активний опір хвилеводу при температурі T0 і температурний коефіцієнт опору відповідно; - подовження хвилеводу, яке при зміні температури визначається за формулою: ΔlхТ=lх0αl(TCT0) (4), де lх0, αl - довжина хвилеводу при температурі T0 і температурний коефіцієнт лінійного подовження відповідно; - модуль зміщення доменів хвилеводу G=kx0F/2[lx0±ΔlxT] (5), де kx0 - стала; F - сила, яка діє на домени матеріалу хвилеводу (наприклад, сила механічного розтягування, Ампера тощо); ΔlxT лінійне подовження хвилеводу, яке обумовлене зміною температури; густина матеріалу хвилеводу, яка описується формулою: ρ=ρ0/[1+3αl(TC-T0)] (6), де ρ0 густина матеріалу хвилеводу при температурі T0, αl - температурний коефіцієнт лінійного подовження відповідно. До суттєвих недоліків відомих МСПр слід віднести недосконалість компенсації температурної похибки вимірювального контролю через те, що як показали експериментальні дослідження, ця похибка є нелінійною, яка зі збільшенням відхилення температури від нормованої приймає форму, близьку до квадратичної. По-друге - не враховується вплив температури газового та рідинного середовищ, які можуть бути різними, наприклад, у літній та зимовий періоди року або в нічні та денні добові зміни температури навколишнього середовища і впливати на електричний опір хвилеводу. По-третє, з формул (1) і (2) видно, що з врахуванням 1 UA 98707 U формул (4) (6) залежність рівня РС 10 15 20 25 30 35 40 45 50 55 зміни температури є нелінійною: l TC T0 , (7). 1 l TC T0 В основу корисної моделі поставлена задача зменшення температурних похибок МСПр, обумовлених змінами температури ГС і PC і підвищенні точності вимірювального контролю рівня магнітострикційним пристроєм. Поставлена задача вирішується тим, що магнітострикційний пристрій (МСПр) для вимірювання рівня рідинних середовищ (PC), який здійснюється за принципом визначення часу проходження електричним струмовим імпульсом (ЕСІ) відстані від місця його подачі до електромагнітного перетворювача (ЕМП), котрий являє собою плаваючий на поверхні PC поплавок з постійним магнітом, і ультразвукового торсійного імпульсу (УЗТІ) від ЕМП до приймача цього імпульсу, а вплив зміни температури PC здійснюється за рахунок розміщення давачів температури вздовж хвилеводу, за котрими розраховується середня температура PC, і включає послідовно з'єднані генератор ЕСІ, хвилевід, плаваючий на поверхні PC поплавок з постійним магнітом, приймач УЗТІ, підсилювач, мікроконтролер, лічильник тактових імпульсів і блок обробки вимірювальної інформації (БОВІ), в якому згідно з корисною моделлю, всередині захисної трубки МСПр уставлені термопари вздовж хвилеводу таким чином, що частина з них знаходиться в газовому середовищі (ГС), а частина в PC, за значеннями котрих визначаються середні температури частин хвилеводу, які знаходиться в ГС і PC, і за котрими розраховується температурна поправка, обумовлена зміною активного електричного опору хвилеводу, а за електричними сигналами двох термопар, одна з яких знаходиться вище поплавка в ГС, а друга нижче цього поплавка в PC, визначається середня температура, за котрою розраховується температурна поправка, обумовлена зміною модуля зміщення, густини матеріалу хвилеводу та його лінійного подовження. В заявленому пристрої вимірювальний контроль рівня PC здійснюється за рахунок часу проходження ЕСІ відстані від генератора цих імпульсів до електромагнітного перетворювача (ЕМП), який знаходиться на поверхні PC, та УЗТІ від ЕМП до приймача цього сигналу з компенсацією нелінійного температурного впливу на ЕМП, а також компенсацією температурної похибки вимірювального контролю, обумовленої нерівномірною зміною температури газового та рідинного середовищ. На відміну від МСПр, у котрих давачі температури розміщені вздовж довжини хвилеводу, а поправка при відхиленні температури від нормованого значення формується за середнім значенням показань цих давачів, у заявленому МСПр давачі температури розташовані вздовж хвилеводу таким чином, щоби в області ЕМП (поплавка з постійним магнітом) знаходилося мінімум два давачі температури, один з яких вимірює температуру ГС, а другий - температуру PC. За їх вихідними сигналами у блоці обробки вимірювальної інформації (БОВІ) розраховується середнє значення температури, а відповідно корегуючий сигнал до результату вимірювального контролю. Це дозволяє отримати наступні результати: - зменшити температурну похибку МСПр контролю рівня PC за рахунок впливу температури контрольованого середовища на роботу ЕМП (поплавка з постійним магнітом); - зменшити температурну похибку МСПр контролю рівня PC разів за рахунок впливу температури газового та рідинного середовища на зміну активного опору хвилеводу; - зменшити нелінійність статичної характеристики при зміні температури контрольованого середовища від мінус 40 °C до плюс 120 °C. На кресленні приведена схема магнітострикційного пристрою, який заявляється, де: 1 технологічний апарат; 2 - хвилевід; 3 - поверхня рідинного середовища; 4 - УЗТІ; 5 електричний струмовий імпульс (ЕСІ); 6 - приймач УЗТІ; 7 - підсилювач ЕСІ; 8 - генератор ЕСІ; 9 - мікропроцесор (МК); 10 - лічильник тактових імпульсів (ЛТІ); 11 - підсилювач приймача УЗТІ; 12 - суматор; 13 - компаратор; 14 - блок обробки сигналів термопар (БОСТ); 15 - джерело опорної напруги (ДОН); 16 - постійний магніт; 17 - поплавок; 18 - захисна трубка; 19 - башмак. На відміну від відомих, в запропонованому МСПр використовуються термоелектричні хромель-копелеві термометри (термопари), котрі рівномірно розташовуються за довжиною хвилеводу таким чином, що відстань між ними як у ГС, так і в PC є однаковою і рівною від 5 до 20 відсотків у залежності від довжини хвилеводу. Всі термопари у певній послідовності періодично опитуються, а їх сигнали у формі термоелектрорушійної сили (термоEРС) Е(Т) у відповідному порядку записуються в блоці 14. На фіг. 1 показано, що термопари 11-13 знаходяться в ГС, а термопари 21-23 - у PC. Таким чином окремо формуються сигнали термопар, які знаходяться в газовому та рідинному середовищах. Від термопар 11 і 21 сигнали подаються в БОСТ для формування поправки, обумовленої зміною модуля зміщення, густини матеріалу хвилеводу та лінійного його подовження. Сигнали термопар 11-13 і 21-23 формують lP t P v 0 1 2 5 від 2 UA 98707 U 5 10 поправку, обумовлену температурною зміною активного опору хвилеводу. Кількість термопар, які знаходяться в ГС і PC залежить від контрольованого рівня. Відлік термопар починається від положення поплавка з ЕМП, тобто від контрольованого рівня як в сторону ГС так і PC. ТермоEPC Е1Г(Т) термопари, яка знаходиться в ГС, та Е1Р(т) термопари, яка знаходиться в PC, надходять в БОВІ, в котрому визначається їх різниця ΔЕХ(Т)=Е1Г(Т)-Е1Р(т). За результатами вимірювання температури термопарами, котрі знаходяться в ГС та PC, визначаються середні значення термоEРС За розрахованими середніми значеннями E Г T і EР T термопар, визначається середнє значення температури хвилеводу. Так як при градуюванні МСПр температури ГС та PC, а відповідно й хвилеводу були рівними деякій нормованій температурі Тх0, то відхилення температури хвилеводу, яке викликає температурну похибку - відносна середня зміна температури ГС; T T 1 Г Рl / l , де Г T Г / T x0 Р T Р / Tx0 15 20 25 30 35 40 P x x0 - відносна середня зміна температури PC. За розрахованим значенням температурної похибки T x формується поправка у вигляді електричного сигналу, який надходить в БОВІ. Запропонований МСПр контролю рівня PC працює наступним чином. Після включення МСПр в роботу мікроконтролер (МК) 9 видає управляючий сигнал на генератор 8, який формує ЕСІ. Останній після підсилення в підсилювачі 7 надходить на вхід хвилеводу 2. Одночасно електрична вимірювальна схема приводиться до нульового стану і включається ЛТІ 10. При цьому ЕСІ, рухаючись уздовж хвилеводу 2 з певною швидкістю, досягає області магнітного поля постійного магніту 16, який знаходиться в плаваючому на поверхні 3 PC поплавку 17. При взаємодії електричного поля ЕСІ з магнітним полем постійного магніту 16 виникає електромагнітне зусилля, котре змінює положення доменів матеріалу хвилеводу. Після того, як ЕСІ проходить область магнітного поля постійного магніту, домени (за аналогією пласкої мембрани) починають загасаючий коливний процес з ультразвуковою частотою, формуючи таким чином УЗТІ 4. Так як коливання доменів відбувається в області магнітного поля постійного магніту 16, то в них виникає індукційний струм (згідно з правилом правої руки) теж з ультразвуковою частотою. Так як УЗТІ відштовхується від магнітного поля, то його рух є протилежним до руху ЕСІ. Це значить, що імпульс УЗС повертається до початку хвилеводу 2. На вході хвилеводу 2 розташовується приймач 6 електромагнітної енергії УЗТІ, котрий перетворює електромагнітне поле УЗТІ в електричну напругу, котра надходить на вхід підсилювача 11, в якому ця напруга підсилюється до необхідного значення, і далі направляється в суматор 12, призначеного для підсумовування сигналу приймача УЗТІ та сигналу температурної поправки, котра формується блоком 14. Із суматора дійсне значення вимірювального сигналу подається в компаратор 13, у котрому порівнюється з опорною напругою, яка формується блоком ДОН 15. При рівності цих напруг ЛТІ 10 припиняє роботу. За кількістю відрахованих тактових імпульсів визначається час, за яким розраховується поточне значення рівня PC. Після запам'ятовування отриманого вимірювального результату в блоці реєстрації виміряного значення рівня починається новий цикл вимірювального контролю. При зміні рівня PC (наприклад, при його збільшенні) поплавок з постійним магнітом підніметься вверх, довжина хвилеводу в ГС зменшиться, відповідно зменшиться кількість тактових імпульсів лічильника, а також час проходження ЕСІ та УЗС по хвилеводу. Таким чином, зі збільшенням рівня PC зменшується час руху ЕСІ та УЗТІ по хвилеводу. Як видно з вищенаведеного, запропонований магнітострикційний пристрій для контролю рівня рідинних середовищ дозволяє отримати закладені заявником технічні результати. 45 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 50 55 Магнітострикційний пристрій (МСПр) для вимірювання рівня рідинних середовищ (PC), який здійснюється за принципом визначення часу проходження електричним струмовим імпульсом (ЕСІ) відстані від місця його подачі до електромагнітного перетворювача (ЕМП), котрий являє собою плаваючий на поверхні PC поплавок з постійним магнітом, і ультразвукового торсійного імпульсу (УЗТІ) від ЕМП до приймача цього імпульсу, а вплив зміни температури PC здійснюється за рахунок розміщення давачів температури вздовж хвилеводу, за котрими розраховується середня температура PC, і включає послідовно з'єднані генератор ЕСІ, хвилевід, плаваючий на поверхні PC поплавок з постійним магнітом, приймач УЗТІ, підсилювач, мікроконтролер, лічильник тактових імпульсів і блок обробки вимірювальної інформації (БОВІ), який відрізняється тим, що всередині захисної трубки МСПр уставлені термопари вздовж хвилеводу таким чином, що частина з них знаходиться в газовому середовищі (ГС), а частина в PC, за значеннями котрих визначаються середні температури частин хвилеводу, які 3 UA 98707 U 5 знаходяться в ГС і PC, і за котрими розраховується температурна поправка, обумовлена зміною активного електричного опору хвилеводу, а за електричними сигналами двох термопар, одна з яких знаходиться вище поплавка в ГС, а друга - нижче цього поплавка в PC, визначається середня температура, за котрою розраховується температурна поправка, обумовлена зміною модуля зміщення, густини матеріалу хвилеводу та його лінійного подовження. Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Автори англійськоюStentsel Yosyp Ivanovych, Shapovalov Oleksii Ivanovych, Riabichenko Anton Viktorovych, Prokaza Olena Ivanivna
Автори російськоюСтенцель Иосиф Иванович, Шаповалов Алексей Иванович, Рябиченко Антон Викторович, Проказа Елена Ивановна
МПК / Мітки
МПК: G01F 23/28
Мітки: пристрій, рівня, магнітострикційний, рідинних, середовищ, контролю
Код посилання
<a href="https://ua.patents.su/6-98707-magnitostrikcijjnijj-pristrijj-dlya-kontrolyu-rivnya-ridinnikh-seredovishh.html" target="_blank" rel="follow" title="База патентів України">Магнітострикційний пристрій для контролю рівня рідинних середовищ</a>
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 321
Опубліковано: 30.04.1999
Автори: Спалек Юрій Михайлович, Воронін Альберт Олексійович, Андрієнко Юрій Олександрович, Зиков Віктор Володимирович, Черепков Олексій Іванович, Жуков Борис Володимирович
МПК: G01F 23/28
Мітки: рівня, рідинних, вимірювання, пристрій, середовищ
Формула / Реферат:
Пристрій для вимірювання рівня рідинних середовищ, що має вимірювальну трубу з акустичним випромінювачем зондуючого сигналу і приймачем акустичних сигналів, підсилювачі-формувачі зондуючого сигналу та сигналів, що приймаються, схему вимірювання часового - інтервалу, функціонально зв'язаного з рівнем, що вимірюється, та індикатор, який відрізняється тим, що вимірювальна труба вибирається з діаметром d < 1.22l, де l - довжина хвилі головної...
Пристрій для вимірювання рівня рідинних середовищ
Номер патенту: 30475
Опубліковано: 15.11.2000
Автори: Воронін Альберт Олексійович, Спалек Юрій Михайлович, Андрієнко Юрій Олександрович, Жуков Борис Володимирович, Черепков Олексій Іванович
МПК: G01F 23/28
Мітки: середовищ, рівня, рідинних, вимірювання, пристрій
Формула / Реферат:
Пристрій для вимірювання рівня рідинних середовищ, який містить вимірювальну трубу з акустичним випромінювачем зондуючого сигналу та першим приймачем акустичних сигналів, підсилювач - формувач зондуючих сигналів, підсилювач-формувач прийнятих сигналів, схему вимірювання часового інтервалу, функційно пов'язаного з вимірюємим рівнем та індикатор, що відрізняється тим, що до нього введений другий приймач акустичних сигналів, який розташовано...
Пристрій контролю рівня рідких середовищ
Номер патенту: 22472
Опубліковано: 25.04.2007
Автори: Дубінін Євген Олександрович, Третяк Віктор Михайлович, Жижирій Андрій Сергійович, Полянський Олександр Сергійович
МПК: G01F 23/24
Мітки: середовищ, рідких, контролю, рівня, пристрій
Формула / Реферат:
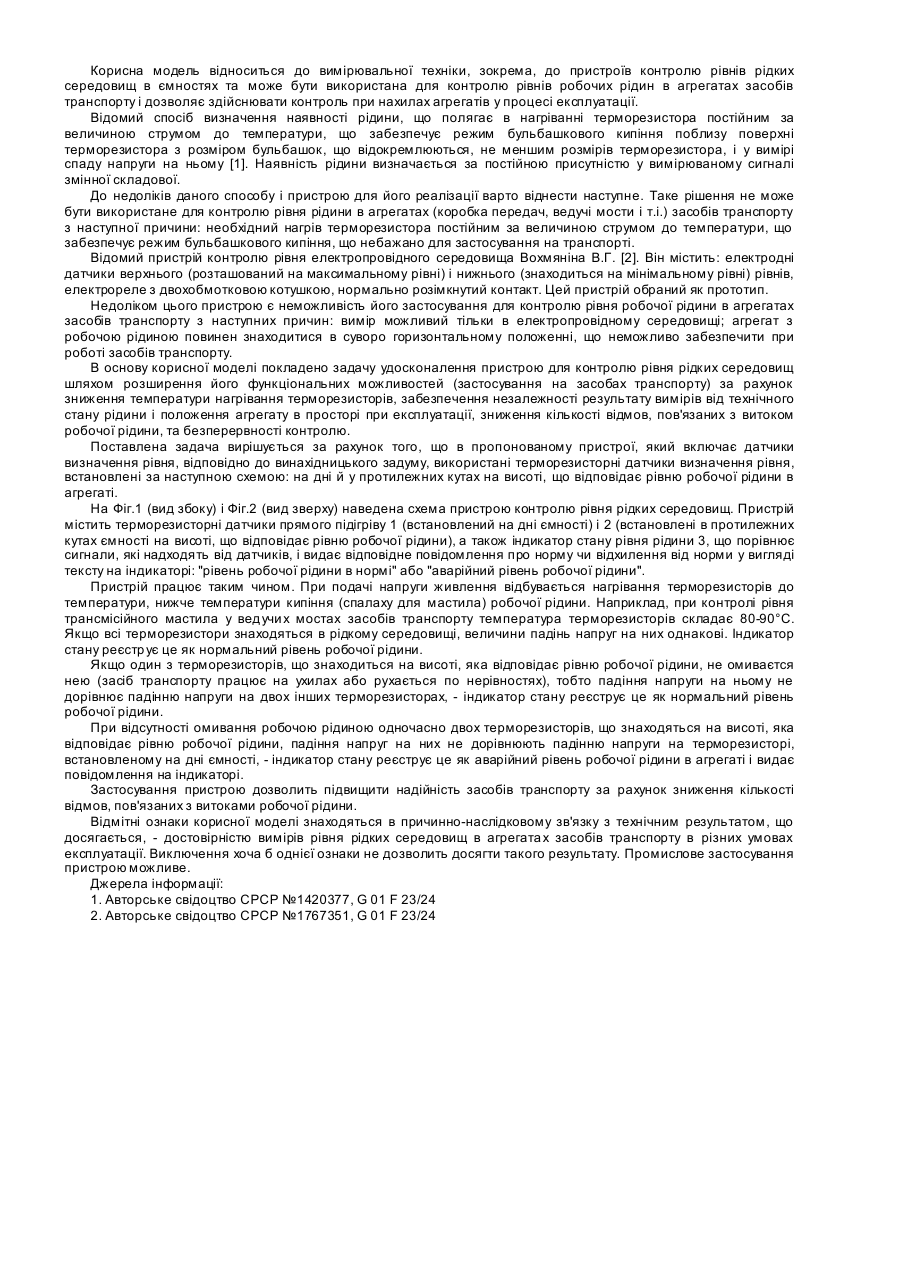
Пристрій контролю рівня рідких середовищ, переважно в агрегатах засобів транспорту, що включає датчики рівня робочої рідини, який відрізняється тим, що як датчики застосовані як мінімум три терморезистори прямого підігріву, розташовані на дні та у протилежних кутах на висоті, що відповідає рівню робочої рідини в агрегаті.
Спосіб вимірювання рівня рідинних середовищ
Номер патенту: 30742
Опубліковано: 15.12.2000
Автори: Воронін Альберт Олексійович, Спалек Юрій Михайлович, Жуков Борис Володимирович, Черепков Олексій Іванович, Андрієнко Юрій Олександрович
МПК: G01F 23/28
Мітки: рівня, середовищ, рідинних, спосіб, вимірювання
Формула / Реферат:
Спосіб вимірювання рівня рідинних середовищ, що включає випромінювання перпендикулярно поверхні рідини зондуючого сигналу, прийняття відбитого від межі розподілу середовищ сигналу та вимірювання часового інтервалу, що функційно пов'язаний з вимірюваним рівнем, що відрізняється тим, що зондуючий та відбитий сигнали каналізують у хвилеведучому тракті у вигляді поздовжніх акустичних хвиль, приймають ці сигнали послідовно у двох (першій та...
Відхиляючий пристрій для тарування витратомірів рідинних середовищ
Номер патенту: 10973
Опубліковано: 15.12.2005
Автори: Мезеря Андрій Юрійович, Большаков Володимир Борисович, Артюх Станіслав Федорович
МПК: G12B 13/00
Мітки: відхиляючий, витратомірів, пристрій, тарування, рідинних, середовищ
Формула / Реферат:
Відхиляючий пристрій для тарування витратомірів рідинних середовищ, що містить відхиляючий візок, привід візка, пристрій контролю положення потоку та вимірювальний бак, який відрізняється тим, що пристроєм контролю положення потоку є лазерні датчики з перехресними променями.
Попередній патент: Спосіб одержання поживної основи із паточної меляси для культивування мікроорганізмів
Наступний патент: Спосіб виробництва вина ігристого “салюте асті”
Випадковий патент: Автоматизована система імітаційного моделювання загальновійськового бою