Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією
Номер патенту: 99037
Опубліковано: 10.07.2012
Автори: Петрова Наталія Сергіївна, Блонський Степан Денисович, Швачка Олександр Іванович
Формула / Реферат
Пропорціонально-інтергально-диференціальний регулятор з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорционального, інтегрального та першого блоку диференціального перетворювання з відповідними пристроями для їх настройки, при цьому виходи блоків з'єднані з трьома входами першого суматора, вихід якого з'єднано з першим входом другого суматора, а також з входом першого інвертору, а вихід цього інвертору підключено до входу функціонального блоку, вихід якого з'єднано з другим входом другого суматору, а також з входом другого інвертору, вихід котрого підключено до блоку затримки і вихід цього блоку затримки з'єднано з третім входом другого суматору, який відрізняється тим, що він додатково містить третій суматор, перший вхід якого з'єднано з виходом другого суматору, а до другого входу третього суматору підключено вихід третього блоку диференціального перетворювання, вхід якого з'єднано з виходом блоку пропорціонального перетворювання, при цьому в якості функціонального блоку використано другий блок диференціального перетворювання і вихід третього суматору є виходом цього регулятору.
Текст
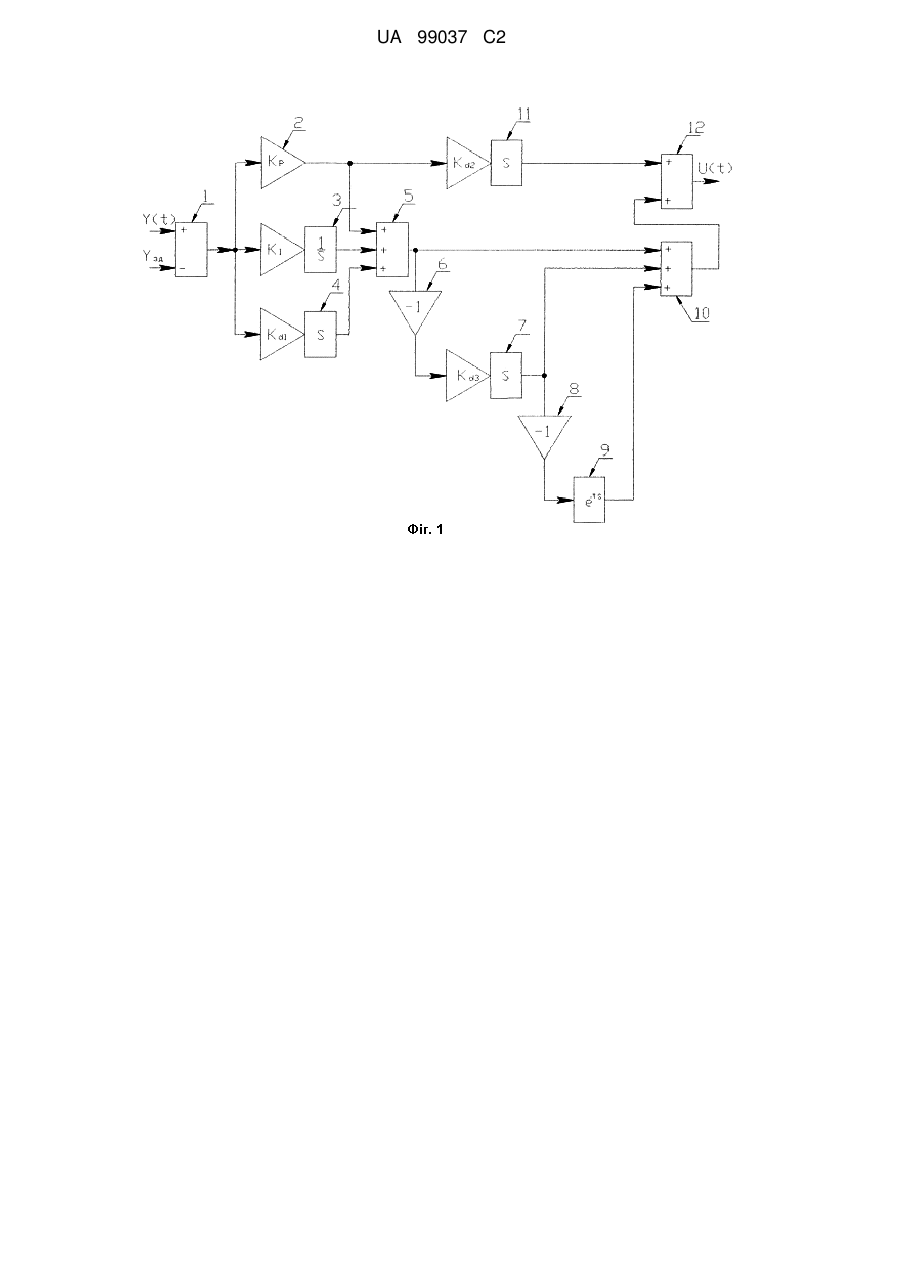
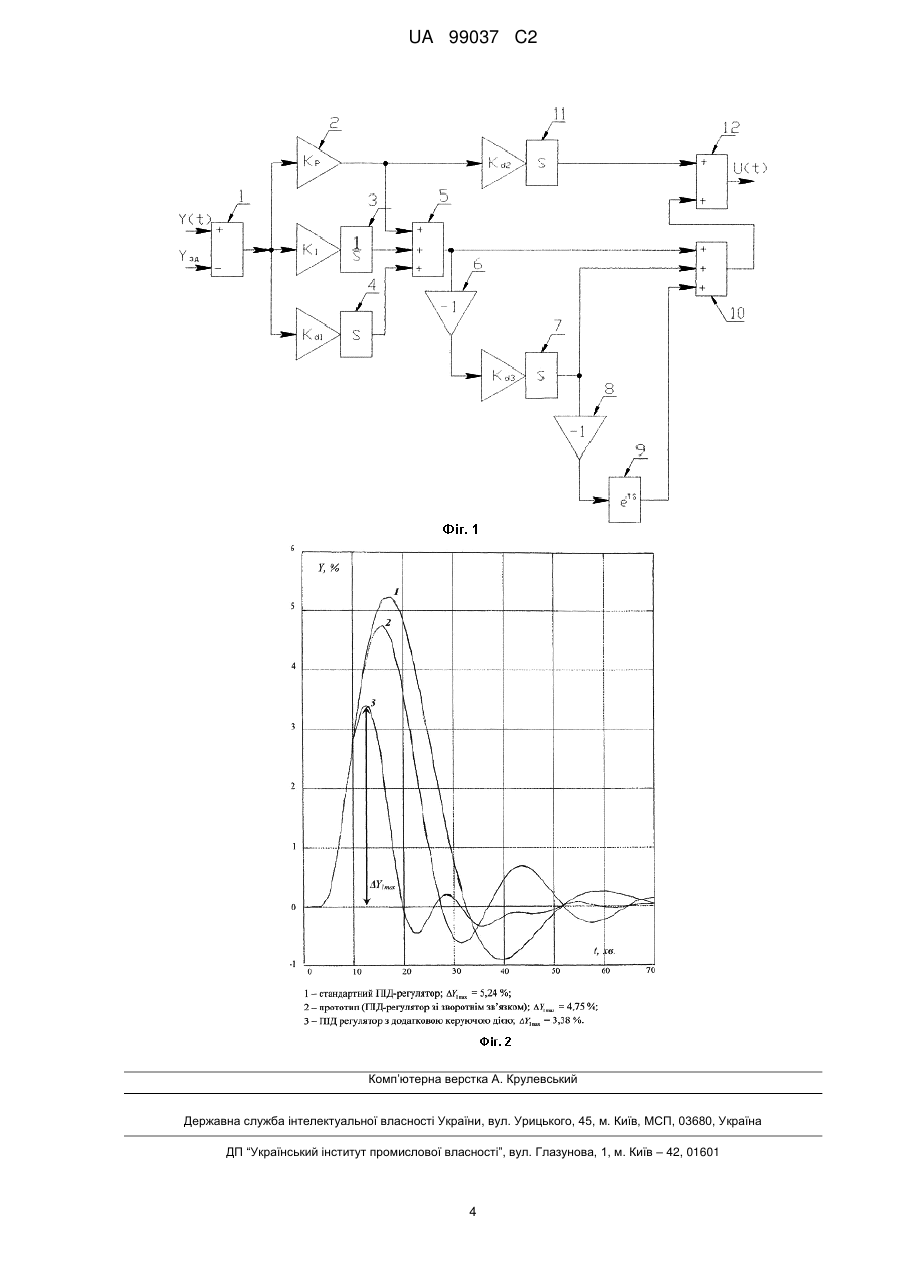
Реферат: Винахід належить до автоматичних регуляторів з додатковою керуючою дією, який може бути використаним для керування технологічними об'єктами із запізнюванням. Задачею винаходу є удосконалення ПІД-регулятора з метою зменшення величини максимального динамічного відхилення в перехідних режимах автоматичних систем регулювання та підвищення запасу усталеності за рахунок додаткової керуючої дії, а також зменшення часу регулювання. Поставлена задача вирішується пропорціонально-інтегрально-диференціальним регулятором з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорціонального, інтегрального та першого блока диференціального перетворювання з відповідними пристроями для їх настройки, при цьому виходи блоків з'єднані з трьома входами першого суматора, вихід якого з'єднано з першим входом другого суматора, а також з входом першого інвертора, а вихід цього інвертора підключено до входу функціонального блока, вихід якого з'єднано з другим входом другого суматора, а також з входом другого інвертора, вихід котрого підключено до блока затримки і вихід цього блока затримки з'єднано з третім входом другого суматора, який додатково має третій суматор, перший вхід якого з'єднано з виходом другого суматора, а до другого входу третього суматора підключено вихід другого блока диференціювання, вхід якого з'єднано з виходом блока пропорціонального перетворювання, при цьому як функціональний блок використано третій блок диференціального перетворювання і вихід третього суматора є виходом цього регулятора. UA 99037 C2 (12) UA 99037 C2 UA 99037 C2 5 10 15 20 25 30 35 40 45 Винахід належить до автоматики та може бути використаний для керування технологічними об'єктами із запізнюванням. Область застосування запропонованого регулятора дуже широка. Він може бути використаним на хімічних та металургійних виробництвах, на виробництвах будівельних матеріалів, а також в багатьох галузях харчового виробництва і на інших виробництвах, де є об'єкти керування зі значним часом запізнювання та де використовуються стандартні пропорціонально-інтегрально-диференціальні регулятори (ПІД-регулятори). Відомий пропорціонально-інтегрально-диференціальний регулятор, детально проаналізований в технічній літературі (Денисенко В.В. ПИД-регуляторы: принципы построения и модификации // Современные технологии автоматизации. Часть 1. 2006, № 4. С. 66-74; Часть 2. 2007, № 1. С. 78-88). Для покращення якості регулювання, у порівнянні з класичним ПІДрегулятором, сигнал розбіжності розраховується окремо для кожної складової регулятора. Додатково вводяться вагові коефіцієнти при пропорційній та диференційних складових. Ваговий коефіцієнт при інтегральній складовій відсутній, що обумовлено забезпеченням нульової розбіжності в усталеному режимі. Основне питання при реалізації пов'язане з вибором вагових коефіцієнтів для забезпечення якості регулювання. При значеннях коефіцієнтів одиниці отримуємо традиційну схему. Методику розрахунку оптимальних вагових коефіцієнтів не визначено. Відомий ПІД-регулятор (Пат. № 2157558 RU, МПК G05B 11/36. Супервизорный пропорционально-интегрально-дифференциальный регулятор / Говоров А.А., Кузьмичев Е.В., Говоров С.А.; - № 99125533/09; завл. 06.12.99; опубл. 10.10.00), в якому по кожному з каналів регулятора вводяться корегуючі динамічні ланки, які можуть бути реалізовані як маштабуючі підсилювачі. Параметри корегуючих динамічних ланок підбираються таким чином, щоб ПІДрегулятор якісно відпрацьовував усі види збурювань. У зазначених моделях, якість роботи обумовлюється точністю розрахунку додаткових настройок регуляторів. Крім того, системи керування, на базі цих регуляторів, не забезпечують задану якість та наявні суттєві динамічні відхилення. Відомий також пропорціонально-інтегрально-диференціальний регулятор (Пат. № 2234116 С1 RU, МПК G05B 11/36. Пропорционально-интегрально-дифференциальный регулятор / Лубенцова Е.В.; - № 2002135205/09; заявл. 24.12.02; опубл. 10.08.04), який характеризується суттєвою конструктивною складністю, обумовлену включенням до його складу нелінійних елементів, обмежувачів сигналу. Запропонована модель забезпечує регулювання параметрів, що мають дрейф та знаходяться під впливом неконтрольованих збурень. Необхідність розрахунку додаткових великої кількості настройок не сприяє забезпеченню оптимального керування та підвищенню показників якості процесу. Найбільш близьким за технічною суттю та ефектом, що досягається, до запропонованого ПІД-регулятора з додатковою керуючою дієює ПІД-регулятор, що включає блоки пропорціонального, інтегрального та диференціального перетворення, виходи яких з'єднані з входом першого суматора, два інвертори, блок інтегрування, блок затримки, другий суматор, перший вхід якого з'єднаний з виходом першого суматора, а вихід є виходом регулятора та через послідовно з'єднані перший інвертор та блок інтегрування з'єднаний з другим входом другого суматора, вихід другого блока інтегрування через послідовно з'єднані другий інвертор та блок затримки з'єднаний з третім входом другого суматора [Пат. 1835215 A3 SU. МПК 6 G05B11/36. Пропорціонально-інтегрально-диференціальний регулятор / Авдєєв І.О., Авдєєв О.Н., Башкіров В.І.; - № 4943229/24; заявл. 05.05.91; опубл. 20.02.96. Бюл. № 5] (прототип). ПІД-регулятор за прототипом працює наступним чином. Сигнал розбіжності z(t ) між значеннями регульованого параметру 50 55 z(t ) та його заданим значенням z зд подається одночасно на три блоки ПІД-регулятора, які і формують основний керуючий сигнал. Далі, завдяки наявності другого суматору, до основного керуючого сигналу додається керуюча дія сигналів зворотного зв'язку, які отримують від другого інтегратора, підключеного до виходу регулятора через інвертор, та блоку затримки, підключеного через інвертор до виходу другого інтегратора. Передатна функція цього регулятора має наступний вигляд: 1 1 , (1) W ( s) K p Tд s ( )s Ti s 1 1 e 1 2 Tc s де K p , Ti , Tд - параметри настройки ПІД-регулятора; 1 - час запізнювання об'єкта керування; 1 UA 99037 C2 5 10 15 20 25 30 35 40 45 50 55 2 - час запізнювання ланцюга зворотного зв'язку; Tc - стала часу замкнутої системи. В даному прототипі не визначено питання якості регулювання, зокрема, максимальне динамічне відхилення та час регулювання, а також не визначено залежності 2 - четвертого параметру настройки цього регулятора від сталих об'єкта керування і, в першу чергу, від 1 часу запізнювання об'єкта. Задачею винаходу є удосконалення ПІД-регулятора для зменшення величини максимального динамічного відхилення в перехідних режимах автоматичних систем регулювання та підвищення запасу усталеності за рахунок додаткової керуючої дії, що підвищує якість та зменшує час регулювання. Поставлена задача вирішується тим, що заявлений пропорціонально-інтегральнодиференціальний регулятор з додатковою керуючою дією, що містить блок порівняння, який з'єднаний з функціональними блоками пропорціонального та інтегрального перетворювання та з першим блоком диференціального перетворювання, що мають відповідні пристрої для їх настройки, при цьому виходи вказаних функціональних блоків з'єднані з трьома входами першого суматора, вихід якого з'єднаний з першим входом другого суматора та з входом першого інвертора, вихід другого інвертора підключений до блока затримки, а вихід блока затримки з'єднаний з третім входом другого суматора, і, відповідно до винаходу, в нього додатково введені другий і третій функціональні блоки диференціального перетворювання та третій суматор, перший вхід якого з'єднаний з виходом другого суматора, а до другого входу третього суматора підключений вихід третього блока диференціального перетворювання, вхід якого з'єднаний з виходом блока пропорціонального перетворювання, при цьому вихід першого інвертора підключений до входу другого блока диференціального перетворювання, вихід якого з'єднаний з другим входом другого суматора та з входом другого інвертора, а вихід третього суматора є виходом регулятора. Функціональна схема пропорціонально-інтегрально-диференціального регулятора з додатковою керуючою дією диференціатора представлена на фіг. 1. Він включає блок порівняння 1, функціональні блоки пропорціонального 2, інтегрального 3 перетворювання та перший блок диференціального перетворювання 4 з відповідними пристроями для їх настройки, при цьому виходи блоків з'єднані з трьома входами першого суматора 5, вихід якого з'єднано з першим входом другого суматора 10, а також з входом першого інвертора 6, а вихід цього інвертора підключено до входу другого функціонального блока диференціального перетворювання 7, вихід якого з'єднано з другим входом другого суматора 10, а також з входом другого інвертора 8, вихід котрого підключено до блока затримки 9, а вихід цього блока затримки з'єднано з третім входом другого суматору 10 і, відповідно до винаходу, він додатково має третій суматор 12, перший вхід якого з'єднано з виходом другого суматора 10, а до другого входу третього суматора 12 підключено вихід третього блока диференціального перетворювання 11, вихід якого з'єднано з виходом блока пропорціонального перетворювання 2, при цьому в якості функціонального блоку 7 використано другий блок диференціального перетворювання і вихід третього суматора 12 є виходом цього регулятора. Запропонований ПІД-регулятор працює наступним чином. На вхід блока порівняння 1 подається вимірювальний сигнал регульованого параметра Y( t ) . На другий вхід цього блока подається сигнал від задатчика Yзд . Блок порівняння 1 обчислює сигнал розбіжності: Y( t ) Y( t ) Yзд Входом пропорціонально-інтегрально-диференціального регулятора є сигнал розбіжності, який подається на входи блоків 2, 3 та 4; вихідні сигнали цих блоків підсумовуються у суматорі 5, вихідний сигнал якого є сигналом керування стандартного ПІД-регулятора. Вихідний сигнал суматора 5 подається на перший вхід другого суматора 10 і одночасно на вхід першого інвертора 6, де змінюється на зворотний і далі подається на вхід другого блока диференціального перетворювання 7. Вихідний сигнал цього блока подається на другий вхід другого суматора 10, а також, одночасно, на вхід другого інвертора 8, де змінює знак на зворотний та подається на вхід блока затримки 9, з виходу якого спрямовується на третій вхід другого суматора 10. Вихідний сигнал другого суматора 10, а також сигнал від третього блока диференціального перетворювання 11, який диференціює вихідний сигнал блока пропорціонального перетворювання 2, подаються на входи третього суматора 12. Вихідний сигнал третього суматора 12 є керуючим сигналом U( t ) цього регулятора. Передавальна функція такого регулятора має вигляд: 2 UA 99037 C2 1 k d1 s) , (2) s де k d1,k d2 ,k d3 - коефіцієнт диференціювання, відповідно, першого, другого та третього блоків диференціального перетворювання; - час запізнювання ланки зворотного зв'язку. Виходячи з закону регулювання, цей регулятор можна назвати "пропорціональноінтегрально-диференціальний з додатковою керуючою дією". Запропонований регулятор може бути побудований з пневматичних елементів та блоків, а також реалізований у вигляді алгоритму керування, який відповідає його закону регулювання у мікропроцесорних контролерах. Оптимальні настройки регулятора розраховують аналогічно визначенню настройок стандартного ПІД-регулятора. Для виявлення позитивних характеристик запропонованого ПІД-регулятора з додатковою керуючою дією на ПЕОМ було проведено порівняльне моделювання автоматичних систем регулювання технологічного об'єкту з запізнюванням з використанням різних видів регуляторів. Враховуючи, що ПІД-регулятор має найбільш поширене практичне використання, в першу чергу провели порівняння перехідних процесів регулювання ПІД-регулятора з додатковою керуючою дією зі стандартним ПІД-регулятором та прототипом при їх оптимальних параметрах настройки. На фіг. 2 представлені перехідні процеси регулювання. Час перехідного процесу регулювання запропонованого регулятору менше ніж у порівнюваних, а максимальне динамічне відхилення Y1max , що є основним показником якості автоматичного регулювання, у випадках використання відповідно стандартного ПІД-регулятора, прототипа та запропонованого ПІДрегулятора становить 5,24 %; 4,75 %; 3,38 % при нанесенні на об'єкт ступеневої збурюючої дії 10 % за навантаженням. Відзначимо також, що значення Y1max ПІД-регулятор з додатковою керуючою дією дає на 35,5 % менше, ніж стандартний ПІД-регулятор, та на 28,8 % менше, ніж значення максимального динамічного відхилення прототипу, що слід вважати суттєвим покращенням якості автоматичного регулювання. Отже, із проведеного порівняльного моделювання робимо висновок, що найкращу якість автоматичного регулювання дає ПІД-регулятор з додатковою керуючою дією, який заявляється, тобто цей регулятор дає найменше максимальне динамічне відхилення Y1max в порівнянні з іншими різновидами регуляторів. Оскільки запропонований регулятор дає мінімальне динамічне відхилення, то з метою покращення якості процесу регулювання можна запропонувати у випадках використання ПІДрегулятора замінити останній запропонованим винаходом. Промислова придатність запропонованого регулятора дуже широка. Він може бути використаним на хімічних та металургійних виробництвах, на виробництвах будівельних матеріалів, а також в багатьох галузях харчового виробництва і на інших виробництвах, де є об'єкти керування зі значним часом запізнювання та де використовуються стандартні ПІДрегулятори. W(s) k p k d2 s (1 k d3 s(1 e s )) (k p kI 5 10 15 20 25 30 35 40 ФОРМУЛА ВИНАХОДУ 45 50 55 Пропорціонально-інтергально-диференціальний регулятор з додатковою керуючою дією, який включає блок порівняння, функціональні блоки пропорціонального, інтегрального та першого блока диференціального перетворювання з відповідними пристроями для їх настройки, при цьому виходи блоків з'єднані з трьома входами першого суматора, вихід якого з'єднано з першим входом другого суматора, а також з входом першого інвертора, а вихід цього інвертора підключено до входу функціонального блока, вихід якого з'єднано з другим входом другого суматора, а також з входом другого інвертора, вихід котрого підключено до блока затримки і вихід цього блока затримки з'єднано з третім входом другого суматора, який відрізняється тим, що він додатково містить третій суматор, перший вхід якого з'єднано з виходом другого суматора, а до другого входу третього суматора підключено вихід третього блока диференціального перетворювання, вхід якого з'єднано з виходом блока пропорціонального перетворювання, при цьому як функціональний блок використано другий блок диференціального перетворювання і вихід третього суматора є виходом цього регулятора. 3 UA 99037 C2 Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
Назва патенту англійськоюProportional-integral differential controller with additional regulating action
Автори англійськоюBlonskyi Stepan Denysovych, Petrova Nataliia Serhiivna, Shvachka Oleksandr Ivanovych
Назва патенту російськоюПропорционально-интегрально-дифференциальный регулятор с дополнительным управляющим действием
Автори російськоюБлонский Степан Денисович, Петрова Наталия Сергеевна, Швачка Александр Иванович
МПК / Мітки
МПК: G05B 11/36, G05B 11/48
Мітки: пропорціонально-інтегрально-диференціальний, керуючою, регулятор, дією, додатковою
Код посилання
<a href="https://ua.patents.su/6-99037-proporcionalno-integralno-diferencialnijj-regulyator-z-dodatkovoyu-keruyuchoyu-diehyu.html" target="_blank" rel="follow" title="База патентів України">Пропорціонально-інтегрально-диференціальний регулятор з додатковою керуючою дією</a>
Пропорційно-інтегрально-диференційний регулятор з додатковою керуючою дією
Номер патенту: 95197
Опубліковано: 11.07.2011
Автори: Шуть Олександр Феліксович, Петрова Наталія Сергіївна, Блонський Степан Денисович
МПК: G05B 11/36
Мітки: керуючою, дією, додатковою, пропорційно-інтегрально-диференційний, регулятор
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор, який включає блок порівняння, функціональні блоки пропорційного, інтегрального та диференційного перетворювання з відповідними пристроями для їх настройки, при цьому виходи цих функціональних блоків з'єднані з трьома входами першого суматора, вихід якого з'єднано з входом другого суматора, який відрізняється тим, що він додатково містить другий блок диференціювання, вхід якого з'єднаний з...
Пропорційно-інтегрально-диференційний регулятор
Номер патенту: 7964
Опубліковано: 15.07.2005
Автори: Коваленко Алім Олексійович, Баранич Юлія Вікторівна, Адамчо Яна Володимирівна, Гусенцова Яна Алімівна, Андрійчук Костянтин Миколайович, Кондауров Євген Миколайович, Подлєсна Світлана Василівна
МПК: H05K 10/00
Мітки: регулятор, пропорційно-інтегрально-диференційний
Формула / Реферат:
Пропорційно-інтегрально-диференційний регулятор, що містить пропорційну, інтегруючу, диференційну ланки та суматор, який відрізняється тим, що він оснащений пневматичним елементом нечіткої логіки.
Регулятор з нечіткою логікою
Номер патенту: 28086
Опубліковано: 26.11.2007
Автори: Гавриленко Олег Іванович, Броннікова Ганна Аркадіївна, Сердюк Сергій Миколайович, Гавриленко Олена Володимирівна
МПК: G05B 13/02
Мітки: нечіткою, регулятор, логікою
Формула / Реферат:
Регулятор з нечіткою логікою, що включає перший підсилювач, вхід якого з’єднаний з входом диференціатора, і послідовно з’єднані фільтр та третій підсилювач, вихід якого є виходом регулятора, через суматор паралельно з’єднаний з входом першого підсилювача, інтегратором, диференціатором, послідовно з’єднаним з другим підсилювачем, які приєднані до входу фазифікатора, який відрізняється тим, що введений четвертий підсилювач, вихід якого...
Цифровий регулятор
Номер патенту: 65784
Опубліковано: 15.04.2004
Автор: Гостєв Володимир Іванович
МПК: H03L 5/00
Формула / Реферат:
1. Цифровий регулятор, що містить з'єднані блок фіксатора помилки і блок вибірки, який відрізняється тим, що він додатково містить блоки формування сигналів m0, m1, m2, і блок виміру швидкості сигналу, перший та другий виходи якого з'єднані відповідно з другими та третіми входами блоків формування сигналів m0, m1, m2, вихід блока фіксатора помилки з'єднаний з першим входом блока формування сигналу m0, другий вихід блока формування сигналу та...
Регулятор напруги для силових трансформаторів
Номер патенту: 35207
Опубліковано: 15.03.2001
Автори: Грабко Володимир Віталійович, Мокін Борис Іванович, Львов Ілля Юрійович
МПК: H02P 13/00
Мітки: напруги, регулятор, силових, трансформаторів
Формула / Реферат:
1. Регулятор напруги для силових трансформаторів, що містить датчик струму, вхід якої підключений до кола струму навантаження, а вихід з'єднаний з першим входом суматора, другий вхід якого підключений до кола напруги навантаження, а перший вихід з'єднаний з першим входом блоку формування і зміни зони нечутливості, вихід якого підключений до входу блоку формування і зміни уставки напруги, вихід якого з'єднаний з входом порогового блоку, вихід...
Попередній патент: Спосіб профілактики та лікування алергічних захворювань, ускладнених макро- та мікроелементозами, у дітей в умовах промислового регіону
Наступний патент: Маса для одержання безфтористих безборних склоемалевих покриттів білого кольору
Випадковий патент: Зубчаста передача