Цифровий спосіб вимірювання напруженості електричного поля та іонних струмів
Номер патенту: 102556
Опубліковано: 10.11.2015
Автори: Грузін Сергій Валерійович, Баженов Віктор Григорович, Баженов Володимир Вікторович
Формула / Реферат
Цифровий спосіб вимірювання напруженості електричного поля та іонної провідності, в якому вимірювальні пластини періодично експонують та екранують в електричному полі, протифазні вимірювальні сигнали пластин підсилюють в диференційному підсилювачі, по синхросигналу датчика положення екрануючої пластини визначають полярність, який відрізняється тим, що по синхросигналу датчика положення екрануючої пластини синхронізують роботу генератора опорних ортогональних сигналів так, щоб частота цих сигналів дорівнювала частоті вимірювального сигналу, одночасно перемножують вимірювальний сигнал з двома складовими ортогонального опорного сигналу, а результати вимірювання отримують за два етапи, причому на першому підготовчому етапі вимірюють кожну постійну складову після перемноження, а на другому змінюють частоту експонування і контролюють зміну результатів вимірювань відносно вимірювань на першому етапі, якщо результати обох складових змінюються, змінюють початкову фазу ортогональних опорних сигналів доки буде змінюватися тільки одна складова при зміні частоти експонування, причому та складова, яка буде залишатися незмінною при зміні частоти експонування, буде пропорційна значенню іонної провідності, а та частина, яка змінюється зі зміною частоти експонування, буде пропорційна індукційному струму.
Текст
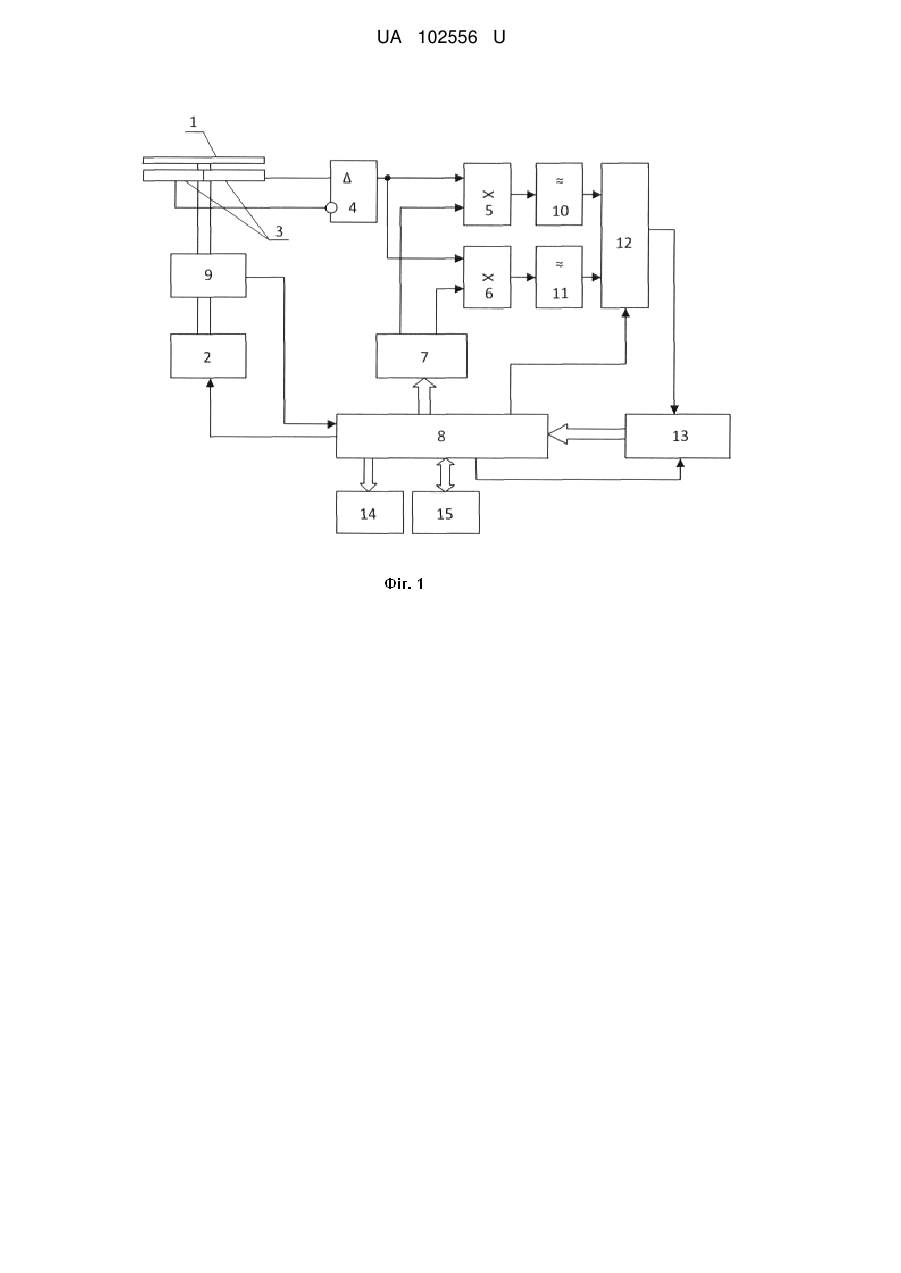
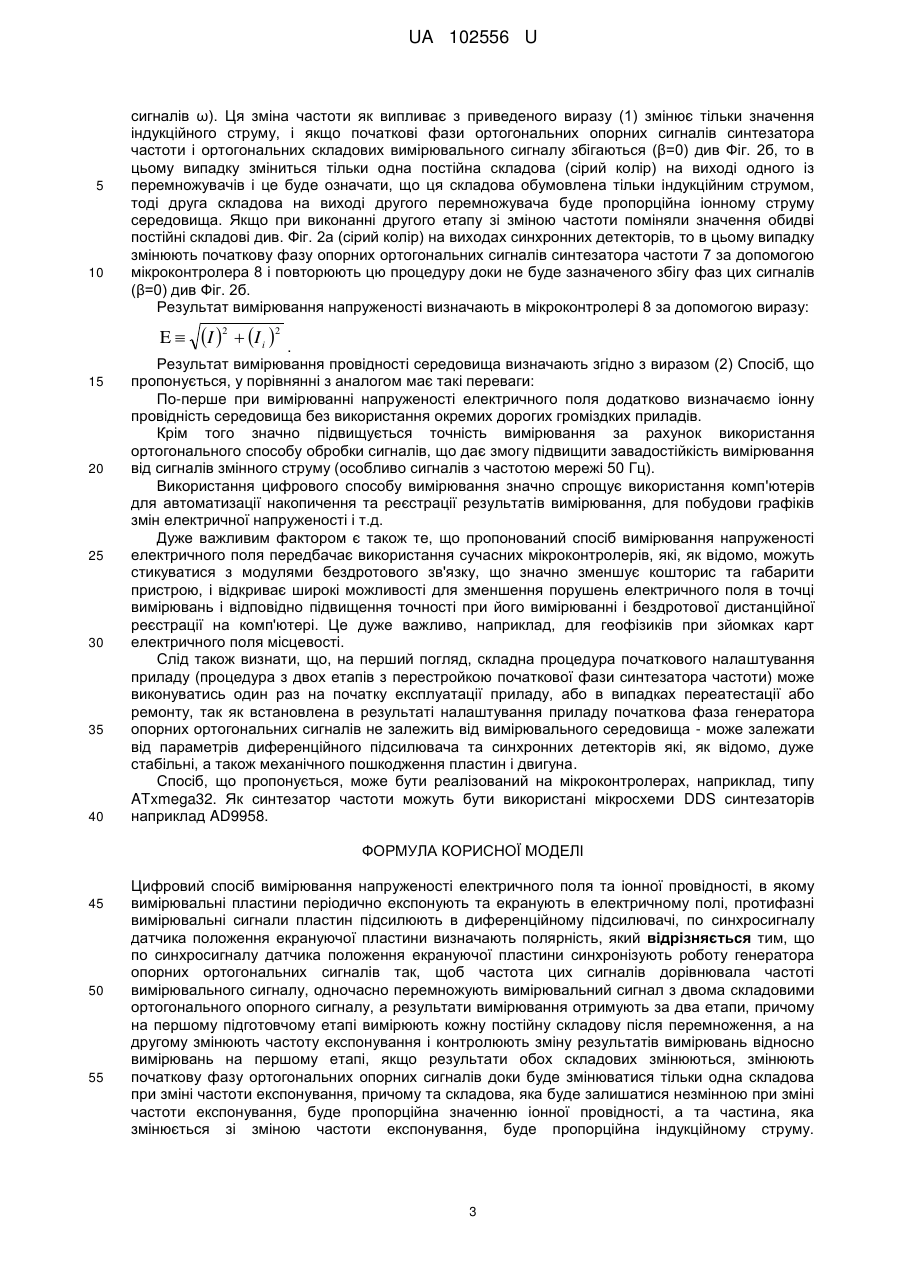
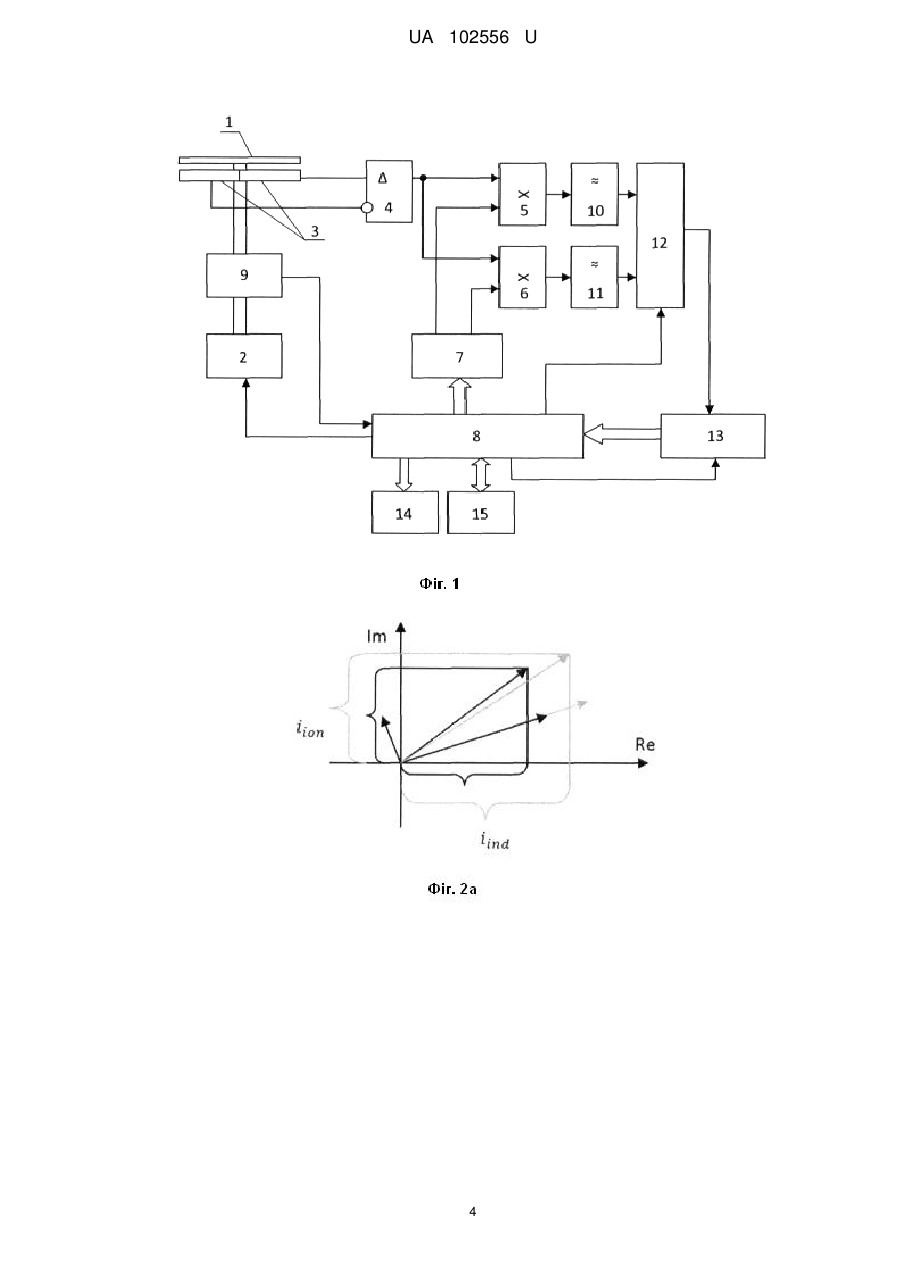
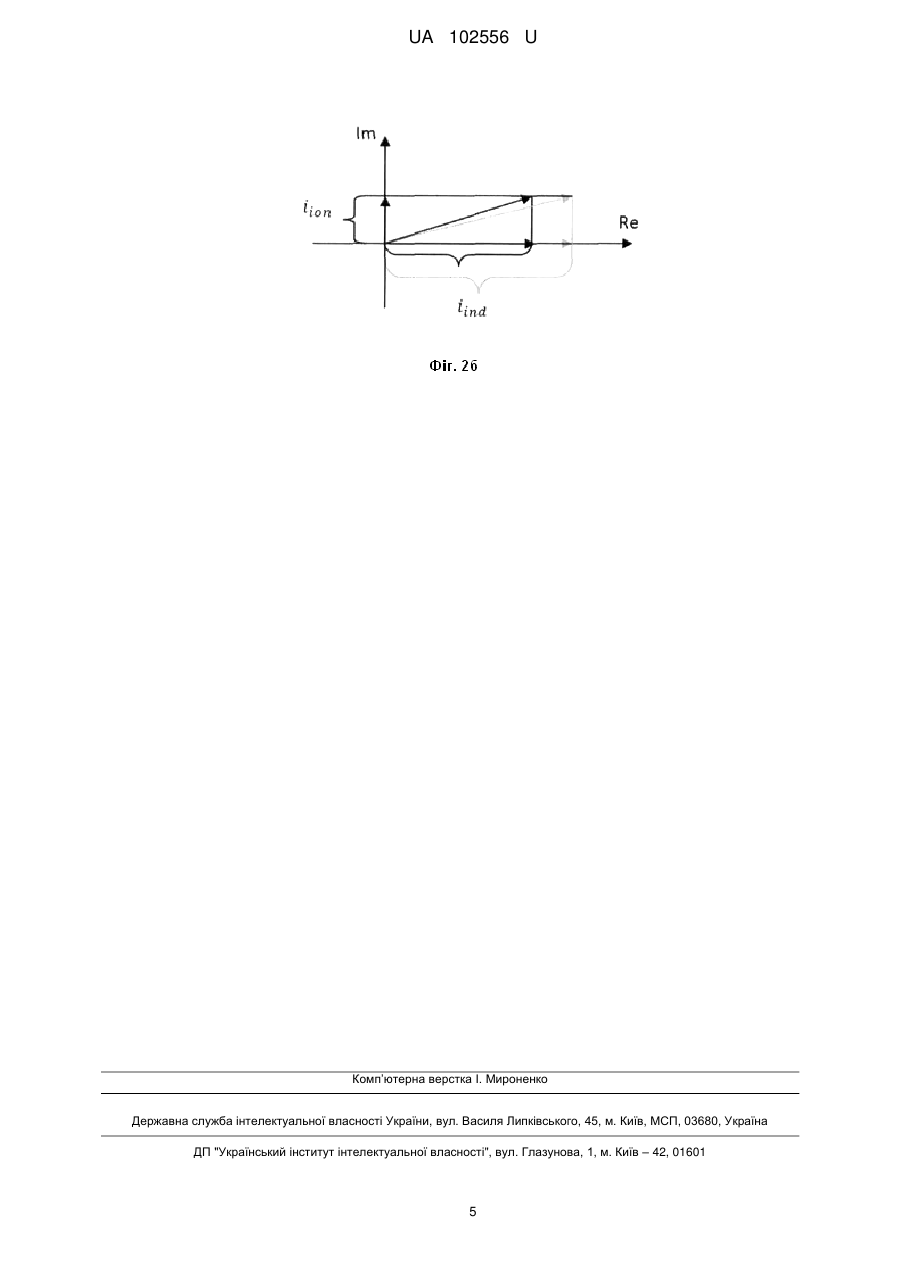
Реферат: Цифровий спосіб вимірювання напруженості електричного поля та іонної провідності, в якому вимірювальні пластини періодично експонують та екранують в електричному полі, протифазні вимірювальні сигнали пластин підсилюють в диференційному підсилювачі, по синхросигналу датчика положення екрануючої пластини визначають полярність. По синхросигналу датчика положення екрануючої пластини синхронізують роботу генератора опорних ортогональних сигналів так, щоб частота цих сигналів дорівнювала частоті вимірювального сигналу, одночасно перемножують вимірювальний сигнал з двома складовими ортогонального опорного сигналу, а результати вимірювання отримують за два етапи, причому на першому підготовчому етапі вимірюють кожну постійну складову після перемноження, а на другому змінюють частоту експонування і контролюють зміну результатів вимірювань відносно вимірювань на першому етапі, якщо результати обох складових змінюються, змінюють початкову фазу ортогональних опорних сигналів доки буде змінюватися тільки одна складова при зміні частоти експонування, причому та складова, яка буде залишатися незмінною при зміні частоти експонування, буде пропорційна значенню іонної провідності, а та частина, яка змінюється, зі зміною частоти експонування буде пропорційна індукційному струму. UA 102556 U (54) ЦИФРОВИЙ СПОСІБ ВИМІРЮВАННЯ НАПРУЖЕНОСТІ ЕЛЕКТРИЧНОГО ПОЛЯ ТА ІОННИХ СТРУМІВ UA 102556 U UA 102556 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до галузі геофізичного приладобудування і може бути використана для вимірювання напруженості електричного поля та іонної провідності атмосфери в геофізиці при пошуках корисних копалин, в промисловості для екологічних вимірювань. Відомий є "ротаційний" або динамічний спосіб вимірювання напруженості електричного поля (див. Имянитов И.М. Приборы и методы для измерения электричества атмосферы. ГИТТЛ. - М., 1957. - С. 193-200), заснований на перетворенні потоку електростатичної індукції в змінний струм, внаслідок того, що вимірювальні пластини періодично експонують і екранують в електричному полі, протифазні сигнали з пластин підсилюють а потім демодулюють в диференційному підсилювачі завдяки сигналу датчика положення екрануючої пластини. Недоліком цього способу є те, що отриманий змінний струм після підсилення знову випрямляють (демодулюють), причому отриманий в результаті сигнал, як показано (див. Имянитов И.М. Приборы и методы для измерения электричества атмосферы. ГИТТЛ. - М., 1957. - С. 193-200) має складну форму, що потребує складної фільтрації, і що ускладнює реалізацію такого способу вимірювання, зменшує чутливість і точність вимірювань і збільшує час вимірювань. Найбільш близьким аналогом є "Цифровий спосіб вимірювання напруженості електричного поля" (див. патент України на винахід № 105423С2 від 12.05.2014 МПК G01R29/12) заснований на перетворенні потоку електростатичної індукції в змінний струм, внаслідок того, що вимірювальні пластини періодично експонують і екранують в електричному полі, протифазні сигнали з пластин підсилюють в диференційному підсилювачі, а по сигналу датчика положення екрануючої пластини визначають полярність електричного поля. Недоліком цього способу є те, що він має малу завадостійкість від сигналів-завад змінного струму, Крім того відомий спосіб не дозволяє визначати значення іонної провідності атмосфери. В основу корисної моделі поставлено задачу підвищення завадостійкості вимірювання напруженості електричного поля, а також вимірювання іонної провідності. Поставлена задача вирішується тим, що вимірювальні пластини періодично експонують та екранують в електричному полі, протифазні сигнали пластин підсилюють в диференційному підсилювачі, а по синхросигналу датчика положення екрануючої пластини визначають полярність. Новим є те що, по синхросигналу датчика положення екрануючої пластини синхронізують роботу генератора опорних ортогональних сигналів так, щоб частота цих сигналів дорівнювала частоті вимірювального сигналу з вимірювальних пластин, одночасно перемножують вимірювальний сигнал з двома складовими ортогонального опорного (sinωt, cosωt) сигналу. Результати вимірювання отримують за два етапи, причому на першому підготовчому етапі вимірюють кожну постійну складову після перемноження, а на другому етапі змінюють частоту експонування і контролюють зміну результатів вимірювань відносно вимірювань на першому етапі, якщо результати обох складових змінюються, змінюють початкову фазу ортогональних опорних сигналів доки буде змінюватися тільки одна складова при зміні частоти експонування, причому та складова, яка буде залишатися незмінною при зміні частоти експонування, буде пропорційна значенню іонних струмів, а та частина, яка змінюється зі зміною частоти експонування, буде пропорційна індукційному струму, після цього обробляють результати вимірювань і розраховують значення напруженості електричного поля та іонної провідності. Спосіб може бути реалізований за допомогою пристрою, який показаний на фіг. 1, фіг. 2а, фіг. 2б. Пристрій, що реалізує спосіб, містить заземлений (з'єднаний з корпусом) екрануючий електрод 1, що знаходиться на валу двигуна 2 і разом з валом обертається перед двома парами ізольованих один від одного та від корпусу вимірювальних пластин 3, які підключено до двох входів диференціального підсилювача 4, вихід якого з'єднано через антиалайзинговий фільтр 5 з верхніми входами синхронних детекторів (перемножувачів) 5, і 6 на другі опорні входи яких подають ортогональні опорні сигнали (sinωt, cosωt) з синтезатора частоти 7, частота яких ω дорівнює частоті вимірювального сигналу з пластин 3, причому цифровий вхід управління синтезатора частоти 7 підключено до одних із виходів мікроконтролера 8, а один із входів мікроконтролера 8 з'єднаний з виходом датчика синхросигналу 9. Крім того, виходи синхронних детекторів (примножувачів) 5 і 6 через фільтри нижніх частот 10 та 11 підключено до комутатора 12, вихід якого підключено до інформаційного входу аналого-цифрового перетворювача (АЦП) 13, цифрові виходи якого підключені до мікроконтролера 7, один із виходів якого з'єднаний зі входом дискретизації аналого-цифрового перетворювача 13, а другий вихід з'єднаний зі входом управління комутатора 12. Крім того виходи мікроконтролера 8 з'єднані з цифровим відліковим пристроєм 14 або з комп'ютером 15. 1 UA 102556 U 5 Цифровий спосіб вимірювання напруженості електричного поля реалізують наступним чином. При обертанні вала двигуна 2 з заземленою екрануючою пластиною 1 періодично екранують то одну пару вимірювальних пластин, то другу 3 і на виході диференційного підсилювача 4 отримують змінний симетричний вимірювальний сигнал (частота якого ω буде визначатись швидкістю обертання вала двигуна), який складається з двох складових. Перша складова струму буде індукційною і визначатись згідно з виразом (див. Имянитов И.М. Приборы и методы для измерения электричества атмосферы. ГИТТЛ. - М.,1957. - С. 193-200): I 10 dQ dt буде пропорційна, а саме I 4hE sin t де Q 4hE cost ; h - відстань між пластинами 1 і 3; - діелектрична проникність середовища. (1) Друга складова струму буде визначатись іонною провідністю I i E cos t 15 25 30 35 40 45 50 середовища (2) де провідність середовища (повітря) 20 E cos t Rср 1 Rср . Як випливає з наведених виразів індукційної та іонної складових струму фазовий зсув між ними складає 90 градусів, причому індукційна складова залежить не тільки від електричної напруженості поля, а також від частоти обертання вала двигуна, яка визначає частоту ω вимірювального сигналу. Вищезазначені ознаки покладені в основу пропонованого способу вимірювання напруженості електричного поля та електричної провідності середовища. По синхросигналу датчика 9 положення екрануючої пластини 1, який надходить на один із входів мікроконтролера 8, за допомогою якого визначається не тільки полярність вимірюваної напруженості електричного поля, але і синхронізується частота ортогональних опорних сигналів синтезатора 7 з можливістю керування мікроконтролером початковою фазою цих сигналів. Ортогональні сигнали, частота яких дорівнює частоті вимірювального сигналу, з виходів синтезатора 7 подають на відповідні опорні входи перемножувачів 5 і 6, на другі входи яких подають вимірювальний сигнал з виходу диференційного підсилювача 4. В результаті перемноження вхідних сигналів перемножувачами 5 і 6 на їх виходах будуть присутні постійні складові, які будуть пропорційні значенням перемножуваних сигналів. Сигнали змінної частоти відфільтровуються за допомогою фільтрів 10 і 11 і за допомогою комутатора 12, який управляється мікроконтролером 8, отримані постійні складові почергово подають на аналоговий вхід аналого-цифрового перетворювача АЦП 13, вхід запуску якого також управляється мікроконтролером 8. Отримані цифрові коди значень цих складових з цифрового виходу АЦП 13 зчитують і обробляють мікроконтролером 8. Індикацію результатів вимірювання реалізують на цифровому відліковому пристрої 14, а реєстрацію і накопичення результатів вимірювання з метою подальшої обробки та оформлення протоколів вимірювань виконують на комп'ютері 15, який зв'язаний з вимірювачем (мікроконтролером 8) за допомогою бездротового зв'язку і який може знаходиться стаціонарно на значній відстані при переміщенні, наприклад, самого вимірювача. Постійні складові, які ми отримуємо на виходах перемножувачів 5 і 6, пропорційні амплітудам вхідних перемножуваних сигналів, але вони також залежать і від фазових зсувів β (див Фіг. 2а) цих сигналів. Проте в фазових зсувах цих сигналів відсутня вимірювальна інформація як про вимірювану електричну напруженість поля, так і про іонну складову середовища, крім того присутність цього фазового зсуву унеможливлює виділення іонної складової, тому за допомогою мікроконтролера 8 змінюють початковий фазовий зсув ортогональних сигналів синтезатора частоти 7 так, щоб він повністю збігався β=0 (див Фіг. 2б) з ортогональними складовими вимірювального сигналу. Для реалізації вищезазначеного виконують наступну процедуру в два етапи. Після отримання результатів вимірювання на першому етапі можемо мати два випадки (див Фіг 2а і див Фіг 2б), то на другому етапі змінюють частоту обертання вала двигуна (що відповідно змінює частоту вимірювальних сигналів і частоту синтезатора ортогональних 2 UA 102556 U 5 10 сигналів ω). Ця зміна частоти як випливає з приведеного виразу (1) змінює тільки значення індукційного струму, і якщо початкові фази ортогональних опорних сигналів синтезатора частоти і ортогональних складових вимірювального сигналу збігаються (β=0) див Фіг. 2б, то в цьому випадку зміниться тільки одна постійна складова (сірий колір) на виході одного із перемножувачів і це буде означати, що ця складова обумовлена тільки індукційним струмом, тоді друга складова на виході другого перемножувача буде пропорційна іонному струму середовища. Якщо при виконанні другого етапу зі зміною частоти поміняли значення обидві постійні складові див. Фіг. 2а (сірий колір) на виходах синхронних детекторів, то в цьому випадку змінюють початкову фазу опорних ортогональних сигналів синтезатора частоти 7 за допомогою мікроконтролера 8 і повторюють цю процедуру доки не буде зазначеного збігу фаз цих сигналів (β=0) див Фіг. 2б. Результат вимірювання напруженості визначають в мікроконтролері 8 за допомогою виразу: E 15 20 25 30 35 40 I 2 I i 2 . Результат вимірювання провідності середовища визначають згідно з виразом (2) Спосіб, що пропонується, у порівнянні з аналогом має такі переваги: По-перше при вимірюванні напруженості електричного поля додатково визначаємо іонну провідність середовища без використання окремих дорогих громіздких приладів. Крім того значно підвищується точність вимірювання за рахунок використання ортогонального способу обробки сигналів, що дає змогу підвищити завадостійкість вимірювання від сигналів змінного струму (особливо сигналів з частотою мережі 50 Гц). Використання цифрового способу вимірювання значно спрощує використання комп'ютерів для автоматизації накопичення та реєстрації результатів вимірювання, для побудови графіків змін електричної напруженості і т.д. Дуже важливим фактором є також те, що пропонований спосіб вимірювання напруженості електричного поля передбачає використання сучасних мікроконтролерів, які, як відомо, можуть стикуватися з модулями бездротового зв'язку, що значно зменшує кошторис та габарити пристрою, і відкриває широкі можливості для зменшення порушень електричного поля в точці вимірювань і відповідно підвищення точності при його вимірюванні і бездротової дистанційної реєстрації на комп'ютері. Це дуже важливо, наприклад, для геофізиків при зйомках карт електричного поля місцевості. Слід також визнати, що, на перший погляд, складна процедура початкового налаштування приладу (процедура з двох етапів з перестройкою початкової фази синтезатора частоти) може виконуватись один раз на початку експлуатації приладу, або в випадках переатестації або ремонту, так як встановлена в результаті налаштування приладу початкова фаза генератора опорних ортогональних сигналів не залежить від вимірювального середовища - може залежати від параметрів диференційного підсилювача та синхронних детекторів які, як відомо, дуже стабільні, а також механічного пошкодження пластин і двигуна. Спосіб, що пропонується, може бути реалізований на мікроконтролерах, наприклад, типу ATxmega32. Як синтезатор частоти можуть бути використані мікросхеми DDS синтезаторів наприклад AD9958. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 45 50 55 Цифровий спосіб вимірювання напруженості електричного поля та іонної провідності, в якому вимірювальні пластини періодично експонують та екранують в електричному полі, протифазні вимірювальні сигнали пластин підсилюють в диференційному підсилювачі, по синхросигналу датчика положення екрануючої пластини визначають полярність, який відрізняється тим, що по синхросигналу датчика положення екрануючої пластини синхронізують роботу генератора опорних ортогональних сигналів так, щоб частота цих сигналів дорівнювала частоті вимірювального сигналу, одночасно перемножують вимірювальний сигнал з двома складовими ортогонального опорного сигналу, а результати вимірювання отримують за два етапи, причому на першому підготовчому етапі вимірюють кожну постійну складову після перемноження, а на другому змінюють частоту експонування і контролюють зміну результатів вимірювань відносно вимірювань на першому етапі, якщо результати обох складових змінюються, змінюють початкову фазу ортогональних опорних сигналів доки буде змінюватися тільки одна складова при зміні частоти експонування, причому та складова, яка буде залишатися незмінною при зміні частоти експонування, буде пропорційна значенню іонної провідності, а та частина, яка змінюється зі зміною частоти експонування, буде пропорційна індукційному струму. 3 UA 102556 U 4 UA 102556 U Комп’ютерна верстка І. Мироненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП "Український інститут інтелектуальної власності", вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital method for measuring electric field intensity and ionic currents
Автори англійськоюBazhenov Viktor Hryhorovych, Bazhenov Volodymyr Viktorovych, Hruzin Serhii Valeriiovych
Назва патенту російськоюЦифровой способ измерения напряженности электрического поля и ионных токов
Автори російськоюБаженов Виктор Григорьевич, Баженов Владимир Викторович, Грузин Сергей Валерьевич
МПК / Мітки
МПК: G01R 29/12
Мітки: струмів, вимірювання, напруженості, спосіб, цифровий, іонних, поля, електричного
Код посилання
<a href="https://ua.patents.su/7-102556-cifrovijj-sposib-vimiryuvannya-napruzhenosti-elektrichnogo-polya-ta-ionnikh-strumiv.html" target="_blank" rel="follow" title="База патентів України">Цифровий спосіб вимірювання напруженості електричного поля та іонних струмів</a>
Цифровий спосіб вимірювання напруженості електричного поля
Номер патенту: 78688
Опубліковано: 25.03.2013
Автори: Баженов Віктор Григорович, Грузін Сергій Валерійович, Якимчук Микола Андрійович
МПК: G01R 29/12
Мітки: цифровий, вимірювання, поля, спосіб, електричного, напруженості
Формула / Реферат:
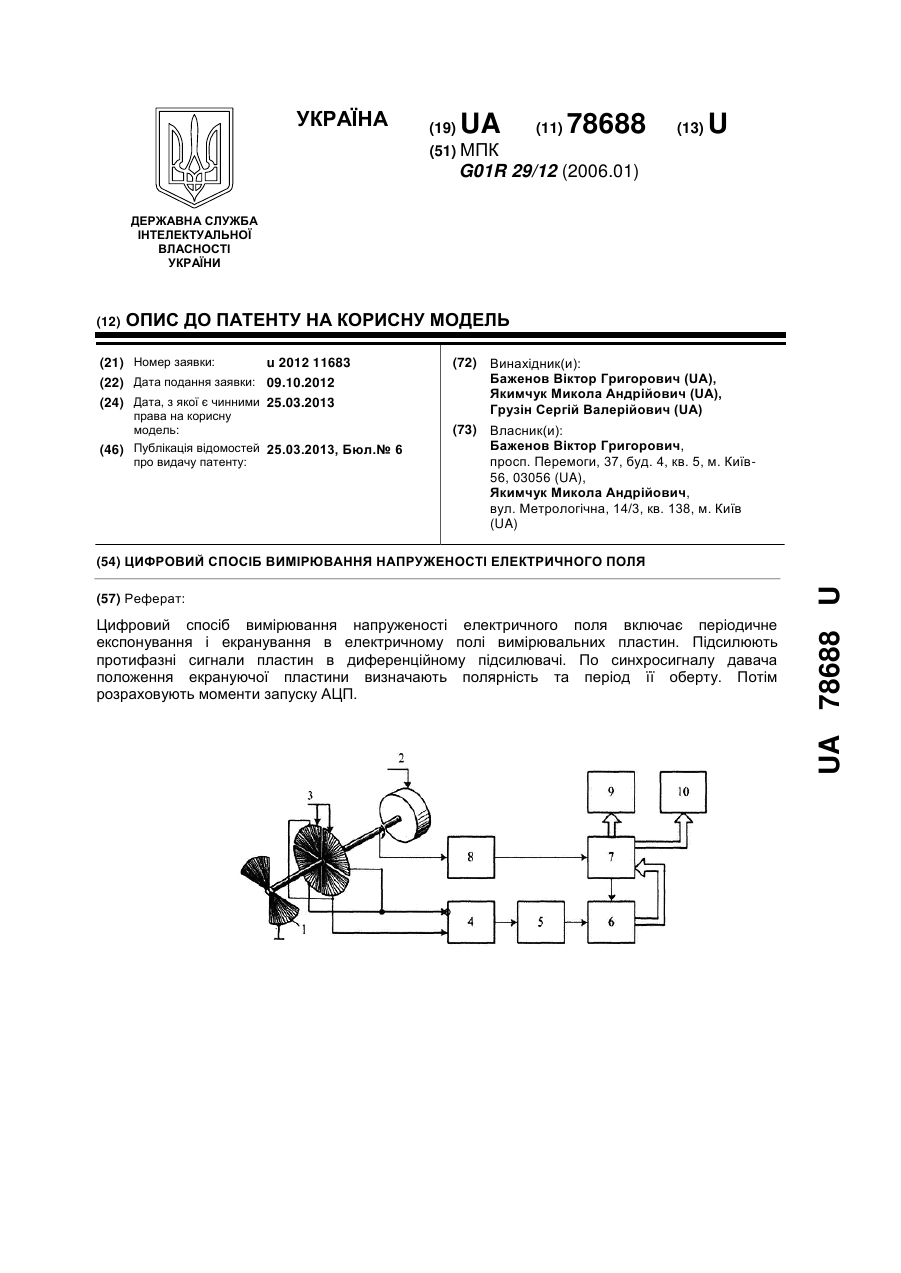
1. Цифровий спосіб вимірювання напруженості електричного поля, який полягає в тому, що вимірювальні пластини періодично експонують і екранують в електричному полі, протифазні сигнали пластин підсилюють в диференційному підсилювачі, по синхросигналу давача положення екрануючої пластини визначають полярність, який відрізняється тим, що по синхросигналу давача положення екрануючої пластини визначають також період її оберту і потім розраховують...
Цифровий спосіб вимірювання напруженості електричного поля
Номер патенту: 105423
Опубліковано: 12.05.2014
Автори: Баженов Віктор Григорович, Якимчук Микола Андрійович, Грузін Сергій Валерійович
МПК: G01R 29/12
Мітки: поля, електричного, цифровий, напруженості, вимірювання, спосіб
Формула / Реферат:
1. Цифровий спосіб вимірювання напруженості електричного поля, який полягає в тому, що вимірювальні пластини періодично експонують і екранують в електричному полі, протифазні сигнали пластин підсилюють в диференційному підсилювачі, по синхросигналу давача положення екрануючої пластини визначають полярність, який відрізняється тим, що по синхросигналу давача положення екрануючої пластини додатково визначають період її оберту і потім...
Пристрій для вимірювання напруженості імпульсного електричного поля
Номер патенту: 33220
Опубліковано: 15.02.2001
Автори: Мелентьєв Максим Вікторович, Неймирок Юлія Сергіївна, Серков Олександр Анатолійович, Гладков Володимир Миколайович, Бреславець Віталій Сергійович, Вершков Олександр Юрійович
МПК: G01R 29/12, H03K 5/00
Мітки: електричного, вимірювання, напруженості, поля, імпульсного, пристрій
Текст:
...імпульса електричного поля; - швидкість поширення сигнала уздовж оболонки вимірювального кабеля та провідної площини. ф|Г. На наведено пристрій для вимірювання напруженості імпульсного електричного поля. Пристрій містить вимірювальний перетворювач 1, з'єднаний з блоком индикації 2, розташованим в екранованому приміщенні 3, за допомогою вимірювального кабеля 4 з розташованими на ньому феритовими кільцями 5. Екрановане приміщення 3...
Пристрій для вимірювання напруженості електричного поля
Номер патенту: 37088
Опубліковано: 16.04.2001
Автори: Удот Андрій Миколайович, Головко Сергій Никифорович, Серков Олександр Анатолійович, Пенькова Светлана Юріївна, Зайцев Деніс Миколайович, Скородєлов Максим Володимирович
МПК: G01R 29/02
Мітки: пристрій, напруженості, поля, електричного, вимірювання
Текст:
...конденсатора 9 сигнал подається до входу перетворюючого блоку 5, що перетворює електричний сигнал в інтенсивність світлового потоку, який крізь отвір в електромагнітному екрані за допомогою світловоду 10 виводиться за межі пристрою для подальшої обробки та реєстрації. У пристрої забезпечується прямо пропорційна залежність вихідного сигналу від напруженості електричного поля, що вимірюється. Це досяга ється за рахунок того, що...
Пристрій для вимірювання напруженості імпульсного електричного поля
Номер патенту: 51228
Опубліковано: 15.11.2002
Автори: Завада Марина Василівна, Марцинюк Ольга Олександрівна, Бортовой Єгор Вадимович, Орлов Олександр Миколаєвич, Серков Олександр Анатолійович, Басов Роман Дмитрович
МПК: G01R 29/02
Мітки: напруженості, поля, пристрій, електричного, імпульсного, вимірювання
Формула / Реферат:
Пристрій для вимірювання напруженості імпульсного електричного поля, що містить у собі вимірювальний перетворювач, виконаний у вигляді двох плоскопаралельних металевих пластин, які під'єднані через кабельну лінію передачі інформації до реєструючого пристрою, який відрізняється тим, що між кабельною лінією передачі інформації та реєструючим пристроєм встановлено узгоджуючий пристрій до складу якого входять перший резистор R1, один кінець...
Попередній патент: Спосіб отримання агломерату
Наступний патент: Монокристалічний матеріал на основі селеніду кадмію, легованого іонами хрому
Випадковий патент: Спосіб виготовлення оптимізованого жорсткого покриття доріг для сільського господарства