Спосіб керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами
Номер патенту: 103665
Опубліковано: 25.12.2015
Автори: Андрейко Ростислав Васильович, Родькін Дмитро Йосипович, Ноженко Вікторія Юріївна

Формула / Реферат
Спосіб керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами, при якому відбувається форсований розгін приводних асинхронних двигунів, як віброзбуджувачі використовуються дебаланси, які синхронно й синфазно обертаються у протилежних напрямках за допомогою механічних синхронізаторів, який відрізняється тим, що система керування оснащена програмованим логічним контролером, перетворювачем частоти, датчиками напруги та струму, причому контролер змінює закон частотного керування в залежності від стадії наближення частоти вимушених коливань до частоти власних коливань системи для зниження резонансної амплітуди коливань робочого органу вібраційної площадки, причому до значення кутової швидкості обертання дебалансних валів ![]() розгін приводних двигунів відбувається за законом частотного керування
розгін приводних двигунів відбувається за законом частотного керування ![]() ,
, ![]() ,
,
де ![]() - поточна кутова швидкість обертання дебалансних валів, рад/с,
- поточна кутова швидкість обертання дебалансних валів, рад/с,
![]() - резонансна кутова швидкість обертання дебалансних валів, що відповідає збігу частоти вимушених коливань із частотою власних коливань вібраційної системи, рад/с,
- резонансна кутова швидкість обертання дебалансних валів, що відповідає збігу частоти вимушених коливань із частотою власних коливань вібраційної системи, рад/с,
![]() - коефіцієнт зміни амплітуди напруги на різних ділянках процесу розгону приводних двигунів,
- коефіцієнт зміни амплітуди напруги на різних ділянках процесу розгону приводних двигунів,
![]() - напруга на обмотках фаз статора, В,
- напруга на обмотках фаз статора, В,
![]() - частота живлячої напруги, Гц,
- частота живлячої напруги, Гц,
на ділянці ![]() розгін здійснюється за законом
розгін здійснюється за законом ![]() , де
, де ![]() , на ділянці
, на ділянці ![]() - за законом
- за законом ![]() ,
, ![]() ,
,
де ![]() - номінальна кутова швидкість обертання роторів приводних двигунів, рад/с.
- номінальна кутова швидкість обертання роторів приводних двигунів, рад/с.
Текст
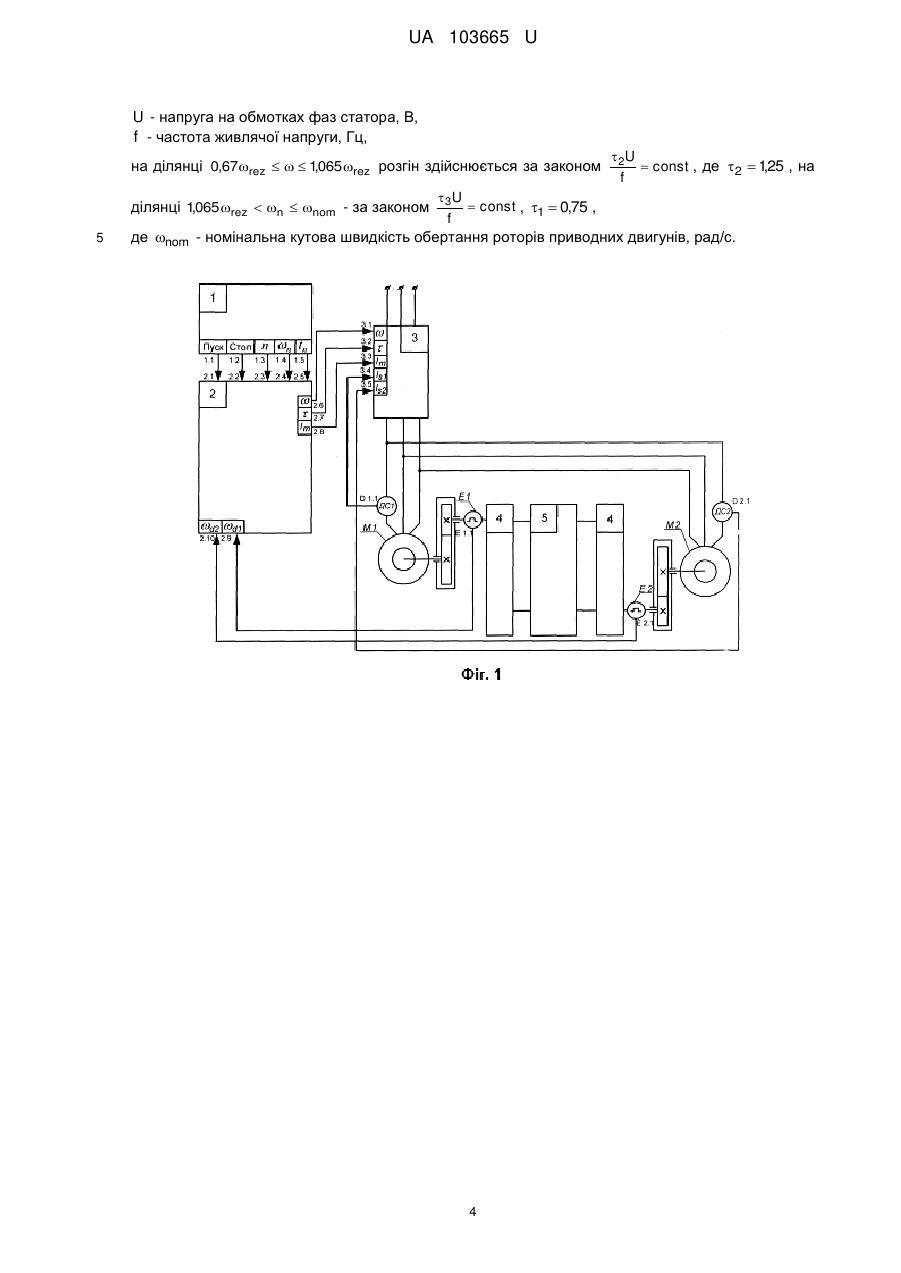
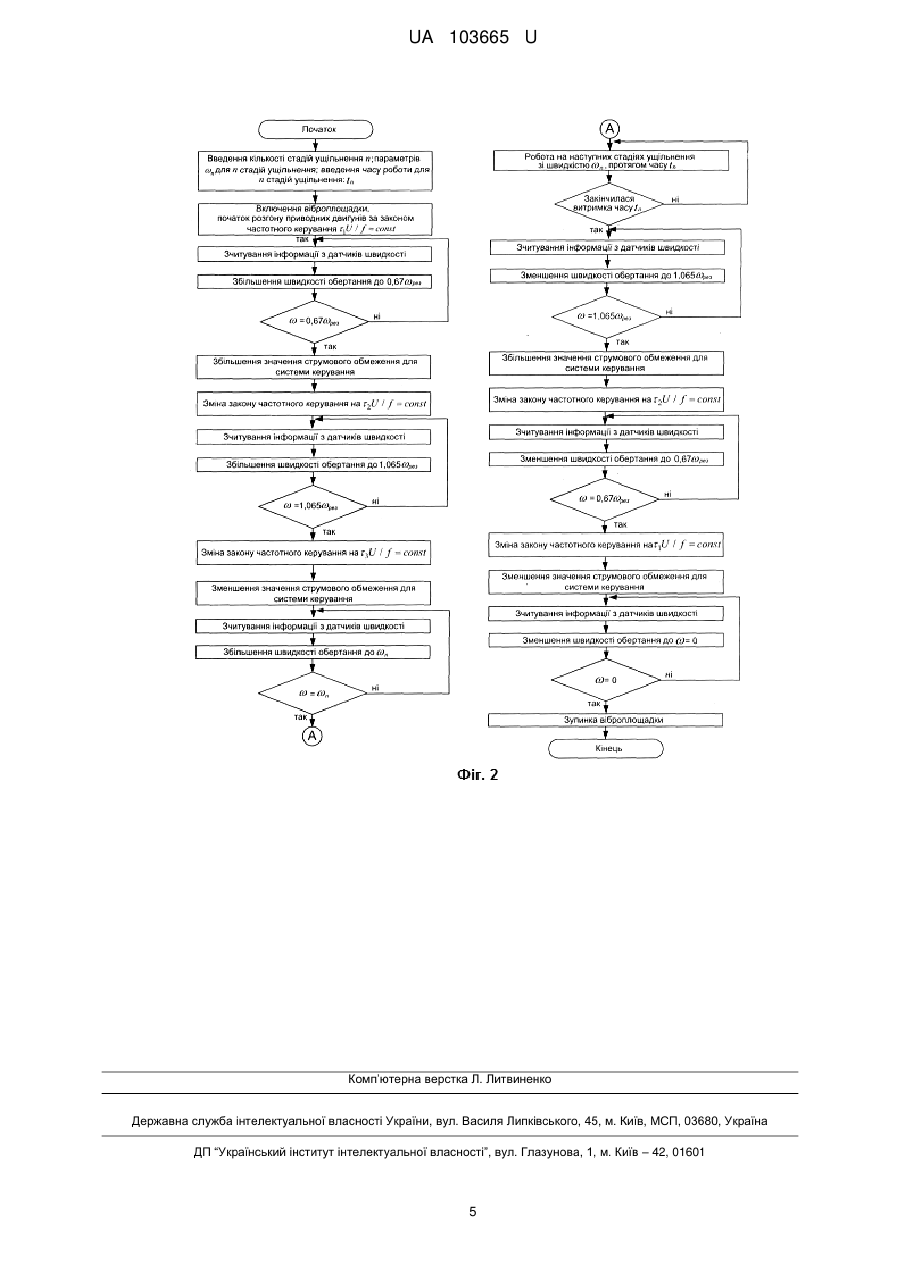
Реферат: Спосіб керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами, при якому відбувається форсований розгін приводних асинхронних двигунів, як віброзбуджувачі використовуються дебаланси, які синхронно й синфазно обертаються у протилежних напрямках за допомогою механічних синхронізаторів, причому система керування оснащена програмованим логічним контролером, перетворювачем частоти, датчиками напруги та струму, причому контролер змінює закон частотного керування в залежності від стадії наближення частоти вимушених коливань до частоти власних коливань системи для зниження резонансної амплітуди коливань робочого органу вібраційної площадки, причому до значення кутової швидкості обертання дебалансних валів 0 0,67rez розгін приводних двигунів 1U const , 1 0,75 , f де - поточна кутова швидкість обертання дебалансних валів, рад/с, rez - резонансна кутова швидкість обертання дебалансних валів, що відповідає збігу частоти вимушених коливань із частотою власних коливань вібраційної системи, рад/с, - коефіцієнт зміни амплітуди напруги на різних ділянках процесу розгону приводних двигунів, U - напруга на обмотках фаз статора, В, f - частота живлячої напруги, Гц, U на ділянці 0,67rez 1065 rez розгін здійснюється за законом 2 const , де 2 125 , на , , f U ділянці 1065 rez n nom - за законом 3 const , 1 0,75 , , f де nom - номінальна кутова швидкість обертання роторів приводних двигунів, рад/с. відбувається за законом частотного керування UA 103665 U (12) UA 103665 U UA 103665 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі виготовлення будівельних матеріалів і призначена для об'ємного ущільнення бетонної суміші у формі з використанням вібраційної площадки. Відоме технічне рішення [Бауман В.А., Быховский И.И. Вибрационные машины и процессы в строительстве. - М.: Высшая школа, 1981.-261 с.], у якому здійснюється прямий пуск приводних двигунів вібраційної площадки з дебалансними віброзбуджувачами, причому два ряди дебалансних валів з'єднані між собою синхронізаторами, які забезпечують їм синхронне і синфазне обертання в протилежні напрямки, взаємно компенсуючи горизонтальні складові коливань. Суттєві ознаки, які збігаються із способом, "що заявляється: використання двовальних дебалансних віброзбуджувачів; наявність механічних синхронізаторів, що забезпечують синхронне та синфазне обертання дебалансів; використання асинхронних двигунів з короткозамкненим ротором, як приводних електричних машин. Недоліком вказаного технічного рішення є відсутність можливості зміни параметрів коливань в процесі ущільнення, як наслідок - неможливо підвищити показники якості бетону; наявне різке збільшення амплітуди коливань під час проходження зони резонансу, яка значно перевищує своє значення у робочій області та негативно впливає на елементи конструкції, електропривод та якість виготовленої продукції. Відоме технічне рішення "Вібраційна площадка з керованою частотою та напрямком коливань" [Патент 2236937 Российской Федерации, кл. В28В1/087. Виброплощадка с управляемой частотой и направлением колебаний / А.В. Баскаков, К.С. Галицков, С.Я. Галицков - №2003112926/03; Заяв. 30.04.2003; Опуб. 27.09.2004], де в процесі роботи вібраційної площадки система автоматичного керування за заданим законом регулює частоту і напрямок коливань. Керування напрямком коливань здійснюється шляхом зміни відносного кута неузгодженості дебалансів зовнішнього та внутрішнього валів. Суттєві ознаки, що збігаються із способом, що заявляється: - використання асинхронних двигунів з короткозамкненим ротором, як приводних; - використання перетворювачів частоти для живлення приводних двигунів; - використання контролера, для видачі керуючих сигналів для перетворювача частоти; - керування частотою коливань. Недоліком даного технічного рішення є те, що важкість проходження резонансної зони та шляхи зменшення резонансних амплітуд не розкриті; не надається інформації про шляхи усунення недоліків, пов'язаних із різким збільшенням амплітуди резонансних коливань, як наслідок - недостатня надійність системи. Найбільш близьким до корисної моделі, що заявляється, та вибраним як прототип є технічне рішення - форсування розгону приводних двигунів у складі одномасової вібраційної системи вертикально направлених коливань, за допомогою конденсаторів, та конденсаторного гальмуваня [Дмитриев В.Н., Гаврилов Е.Н. Переходные процессы зарезонансных вибрационных машин //. Электротехнические комплексы и системы управления.-2011. - № 4. С. 52-55], де за допомогою послідовного включення конденсаторів в обмотки статора двигуна відбувається форсування пуску приводних двигунів, що дозволяє пришвидшити проходження зони резонансу та зменшити резонансні амплітуди коливань. Суттєві ознаки що збігаються із способом, що заявляється: - синхронне обертання дебалансів у протилежні напрямки для забезпечення вертикально направлених коливань; - використання асинхронних двигунів як приводних електричних машин; - форсування розгону приводних двигунів для прискореного проходження резонансної зони. Недоліком даного технічного рішення є те, що воно не містить даних про можливість керування параметрами коливань робочого органу вібраційної площадки. Запропонований метод дозволяє знизити резонансні амплітуди коливань всього на 15-30 %, у порівнянні з прямим пуском. В основу корисної моделі поставлена задача розробити спосіб керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами, яким досягається: більш безпечне проходження області резонансу, у порівнянні з прямим пуском, що зменшує знос обладнання вібраційної системи; керування частотою коливань в усталеному режимі, задля розширення функціональних можливостей вібраційної площадки; підвищення ефективності ущільнення бетонної суміші. Поставлена задача вирішується тим, що вібраційна площадка оснащена частотнорегульованим електроприводом та програмованим логічним контролером, який у відповідності 1 UA 103665 U 5 10 15 20 25 до заданих параметрів коливань задає необхідну частоту обертання дебалансів, та дає можливість форсованого розгону приводних двигунів для прискореного проходження області резонансу. Технічний результат полягає у: забезпеченні контрольованого проходження резонансної зони; зниженні амплітуди резонансних коливань на 50-60 %, у порівнянні з прямим пуском; керуванні частотою коливань в усталеному режимі роботи віброплощадки; підвищенні показників якості бетонних виробів; підвищенні надійності системи; зменшенні зносу обладнання; зниженні потужності, що споживається двигунами в усталеному режимі на 50 %, у порівнянні з некерованим електроприводом вібраційної площадки. Корисна модель пояснюється кресленням, де на фіг. 1 зображено функціональну схему системи керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами, на якій прийняті наступні позначення: 1 - пульт керування оператора; 2 - програмований логічний контролер; 3 - перетворювач частоти; 4 - механічні синхронізатори; 5 - віброблоки вібраційної площадки; M1, M2 - приводні асинхронні двигуни; Е1, Е2 - датчики швидкості; ДС1, ДС2 - датчики струму; n - кількість стадій ущільнення; tn - час ущільнення бетонної суміші на певній стадії n , с; n - середнє арифметичне значення кутової швидкості обертання дебалансних валів віброплощадки, що відповідає певній стадії ущільнення n , рад/с; середнє арифметичне значення кутової швидкості обертання дебалансних валів віброплощадки, рад/с; d1 - швидкість обертання першого вала з дебалансами, рад/с; d2 швидкість обертання другого вала з дебалансами, рад/с; - коефіцієнт зміни амплітуди напруги для форсування розгону приводних двигунів, Im - сигнал на зміну значення струмового обмеження для системи керування; IS1 , IS2 - значення струму статора першого та другого двигуна, отримане з датчиків струму, A; U - напруга статора, В; f - частота напруги, Гц. На фіг. 2 приведений алгоритм роботи для способу керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами, де прийняті наступні позначення: n - кількість стадій ущільнення; n - середнє арифметичне значення кутової швидкості обертання дебалансних валів віброплощадки, що відповідає певній стадії ущільнення n ; tn - час роботи для різних стадій ущільнення; 1 - коефіцієнт зміни амплітуди напруги перетворювача, 1 0,75 ; 0,67 рез - порівняння поточного середньоарифметичного значення швидкості обертання 30 дебалансних валів із значенням, рівним добутку 0,67рез ; 2 - коефіцієнт зміни амплітуди напруги 35 40 порівняння поточного 1065 рез , 2 125 ; , середньоарифметичного значення швидкості обертання дебалансних валів із значенням, рівним добутку 1065 рез ; 3 - коефіцієнт зміни амплітуди напруги перетворювача, 3 0,5 ; n , - середнє арифметичне значення кутової швидкості обертання дебалансних валів віброплощадки на стадії ущільнення; порівняння поточного n -й 0 середньоарифметичного значення швидкості обертання дебалансних валів з нулем, що відповідає повній зупинці привода. Спосіб керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами полягає у наступному. Ущільнення бетонної суміші починається із введення даних з пульта керування (фіг. 1) кількості стадій ущільнення ( n ), швидкості обертання дебалансів ( n ) та часу ущільнення на n -й стадії ( tn ). Далі відбувається ввімкнення привода вібраційної площадки (натискання кнопки "Пуск"). Після чого робота системи керування виконується згідно з алгоритмом (фіг. 2), а саме: відбувається зростання швидкості обертання до 0,67 рез , за 1U const , та проводиться порівняння поточного f середньоарифметичного значення кутової швидкості обертання валів віброплощадки зі значенням, що дорівнює добутку 0,67рез . Якщо умова виконується, відбувається формування законом 45 50 перетворювача, частотного керування сигналу керування роботою вібраційної площадки, що передається на вхід перетворювача частоти та збільшується значення уставки максимально-струмового захисту перетворювача. U Після чого проходить зміна закону частотного керування на 2 const , причому сигнал на f зміну закону частотного керування проходить через аперіодичну ланку з передавальною 2 UA 103665 U 1 . У наступний момент часу продовжується розгін приводних двигунів 0,01p 1 та проводиться порівняння поточного середньоарифметичного значення кутової швидкості обертання валів віброплощадки із значенням 1065 рез . Коли задана рівність виконується, , функцією W (p) 5 10 15 20 25 відбувається формування сигналу керування роботою вібраційної площадки, що передається на вхід перетворювача частоти та зменшується значення уставки максимально-струмового захисту перетворювача до номінального значення. Після чого проходить зміна закону U частотного керування на 3 const , причому сигнал на зміну закону частотного керування f 1 проходить через аперіодичну ланку з передавальною функцією W (p) . За даним 0,01p 1 законом продовжується розгін приводних двигунів до швидкості n , що відповідає певній стадії ущільнення. Кількість стадій ущільнення n може бути довільною, а значення швидкості n , що відповідають певним стадіям, можуть змінюватися у межах 1065 рез n пом , де пом , номінальна кутова швидкість обертання роторів двигунів. Після закінчення часу витримки усіх заданих стадій ущільнення, відбувається гальмування приводу, яке здійснюється у наступній послідовності. У момент часу, коли закінчується остання стадія ущільнення, починається зменшення швидкості обертання до значення 1065 рез . Коли , дана рівність виконується, відбувається формування сигналу, що передається на вхід перетворювача частоти та збільшується значення уставки максимально-струмового захисту перетворювача. Після чого проходить зміна закону частотного керування на 2U const , f причому сигнал на зміну закону частотного керування проходить через аперіодичну ланку з 1 передавальною функцією W (p) . За таким законом частотного керування 0,01p 1 продовжується зменшення швидкості обертання приводних двигунів до значення, що дорівнює добутку 0,67рез . Коли вказана рівність починає виконуватися, проходить зміна закону частотного керування на 1U const , причому сигнал на зміну проходить через аперіодичну f 1 ланку з передавальною функцією W (p) . Після чого контролер формує сигнал, що 0,01p 1 передається на вхід перетворювача частоти та зменшує значення уставки максимальнострумового захисту перетворювача до номінального. За даним законом частотного керування продовжується скидання швидкості обертання дебалансних валів до повної зупинки. Після досягнення рівності 0 , що відповідає повній зупинці привода, відбувається вимкнення приводу та завершення роботи алгоритму. 30 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 35 40 Спосіб керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами, при якому відбувається форсований розгін приводних асинхронних двигунів, як віброзбуджувачі використовуються дебаланси, які синхронно й синфазно обертаються у протилежних напрямках за допомогою механічних синхронізаторів, який відрізняється тим, що система керування оснащена програмованим логічним контролером, перетворювачем частоти, датчиками напруги та струму, причому контролер змінює закон частотного керування в залежності від стадії наближення частоти вимушених коливань до частоти власних коливань системи для зниження резонансної амплітуди коливань робочого органу вібраційної площадки, причому до значення кутової швидкості обертання дебалансних валів 0 0,67rez розгін приводних двигунів 1U const , 1 0,75 , f де - поточна кутова швидкість обертання дебалансних валів, рад/с, rez - резонансна кутова швидкість обертання дебалансних валів, що відповідає збігу частоти вимушених коливань із частотою власних коливань вібраційної системи, рад/с, - коефіцієнт зміни амплітуди напруги на різних ділянках процесу розгону приводних двигунів, відбувається за законом частотного керування 45 3 UA 103665 U U - напруга на обмотках фаз статора, В, f - частота живлячої напруги, Гц, на ділянці 0,67rez 1065 rez розгін здійснюється за законом , 3U const , 1 0,75 , f де nom - номінальна кутова швидкість обертання роторів приводних двигунів, рад/с. ділянці 1065 rez n nom - за законом , 5 2U const , де 2 125 , на , f 4 UA 103665 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B28B 1/087, H02K 7/065
Мітки: спосіб, керування, віброзбуджувачами, дебалансними, двовальними, вібраційною, площадкою
Код посилання
<a href="https://ua.patents.su/7-103665-sposib-keruvannya-vibracijjnoyu-ploshhadkoyu-z-dvovalnimi-debalansnimi-vibrozbudzhuvachami.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування вібраційною площадкою з двовальними дебалансними віброзбуджувачами</a>
Спосіб керування електроприводом вібраційної машини з двома дебалансними віброзбуджувачами
Номер патенту: 100831
Опубліковано: 10.08.2015
Автори: Ченчевой Володимир Віталійович, Ноженко Вікторія Юріївна, Родькін Дмитро Йосипович
МПК: B06B 1/02, B06B 1/16, G05D 19/00
Мітки: спосіб, електроприводом, керування, дебалансними, віброзбуджувачами, двома, машини, вібраційної
Формула / Реферат:
Спосіб керування електроприводом вібраційної машини з двома дебалансними віброзбуджувачами, які синхронно обертаються в протилежні напрямки та генерують вертикально направлені коливання робочого органу, що полягає у прискореному пуску приводних асинхронних двигунів шляхом підвищення електромагнітного моменту, який відрізняється тим, що в процесі пуску асинхронних двигунів вібраційної машини із заданим прискоренням відбувається контроль...
Спосіб пуску вібраційної машини з двома дебалансними віброзбудниками збудниками, що самосинхронізуються
Номер патенту: 103392
Опубліковано: 10.10.2013
Автори: Ярошевич Микола Павлович, Ярошевич Тетяна Серафимівна
МПК: G05D 19/00, B06B 1/16
Мітки: самосинхронізуються, машини, двома, вібраційної, спосіб, пуску, дебалансними, збудниками, віброзбудниками
Формула / Реферат:
Спосіб пуску вібраційної машини з двома дебалансними віброзбудниками, що самосинхронізуються, встановленими на м'якоамортизованому несучому тілі, яке плоско коливається, що здійснюється шляхом прямого пуску електродвигунів, який відрізняється тим, що електродвигуни мають незалежну систему керування пуском, за допомогою якої спочатку вмикають один електродвигун, і лише після його виходу на усталений зарезонансний режим обертання, вмикають...
Спосіб керування вентильним двигуном у синхронному режимі з використанням нечіткого регулятора
Номер патенту: 40910
Опубліковано: 27.04.2009
Автори: Іванець Сергій Анатолійович, Гусев Олександр Олександрович
МПК: H02P 6/00
Мітки: синхронному, двигуном, вентильним, керування, нечіткого, використанням, спосіб, режимі, регулятора
Формула / Реферат:
Спосіб керування вентильним двигуном у синхронному режимі з використанням нечіткого регулятора, який відрізняється тим, що використовують єдиний нечіткий регулятор як на етапі стабілізації швидкості, так і на етапі розгону двигуна з використанням частотного пуску.
Спосіб керування процесом подрібнення в барабанному млині із автоколивним внутрішньокамерним завантаженням
Номер патенту: 57104
Опубліковано: 10.02.2011
Автор: Дейнека Катерина Юріївна
МПК: B02C 25/00
Мітки: керування, завантаженням, подрібнення, млині, внутрішньокамерним, спосіб, процесом, барабанному, автоколивним
Формула / Реферат:
Спосіб керування процесом подрібнення в барабанному млині із автоколивним внутрішньо-камерним завантаженням, що включає вимірювання та змінювання кутової швидкості обертання барабана до досягнення визначальним параметром максимального можливого значення, який відрізняється тим, що керування кутовою швидкістю обертання барабана здійснюють за значенням амплітуди крутильних коливань пружного кутового елемента в приводі барабана.
Спосіб керування синхронізованими асинхронними електроприводами

Номер патенту: 68823
Опубліковано: 10.04.2012
Автори: Марцинюк Віталій Богданович, Хребтова Оксана Анатоліївна, Гладир Андрій Іванович
МПК: H02P 5/00
Мітки: синхронізованими, електроприводами, асинхронними, спосіб, керування
Формула / Реферат:
Спосіб керування синхронізованими асинхронними електроприводами, який полягає у вмиканні асинхронних двигунів через перетворювачі частоти та зчитуванні інформації щодо поточного стану та наявності перекосу робочого органа, який відрізняється тим, що відразу після початку руху система керування контролює і визначає ступінь нахилу робочого органа шляхом опитування одного вимірювального датчика, який безпосередньо вимірює кут нахилу αн,...
Попередній патент: Спосіб лікування цефалгічного синдрому, обумовленого венозною дисциркуляцією
Наступний патент: Пристрій адаптивного регулювання трифазного силового активного фільтра з визначенням верхньої і нижньої межі зони гістерезису релейного регулятора струму
Випадковий патент: Спосіб прогнозування зрощення перелому