Спосіб керування синхронізованими асинхронними електроприводами
Номер патенту: 68823
Опубліковано: 10.04.2012
Автори: Марцинюк Віталій Богданович, Хребтова Оксана Анатоліївна, Гладир Андрій Іванович

Формула / Реферат
Спосіб керування синхронізованими асинхронними електроприводами, який полягає у вмиканні асинхронних двигунів через перетворювачі частоти та зчитуванні інформації щодо поточного стану та наявності перекосу робочого органа, який відрізняється тим, що відразу після початку руху система керування контролює і визначає ступінь нахилу робочого органа шляхом опитування одного вимірювального датчика, який безпосередньо вимірює кут нахилу αн, при наявності перекосу система керування, з метою його усунення, приймає рішення щодо збільшення або зменшення швидкості відповідного асинхронного двигуна залежно від їх поточної завантаженості.
Текст
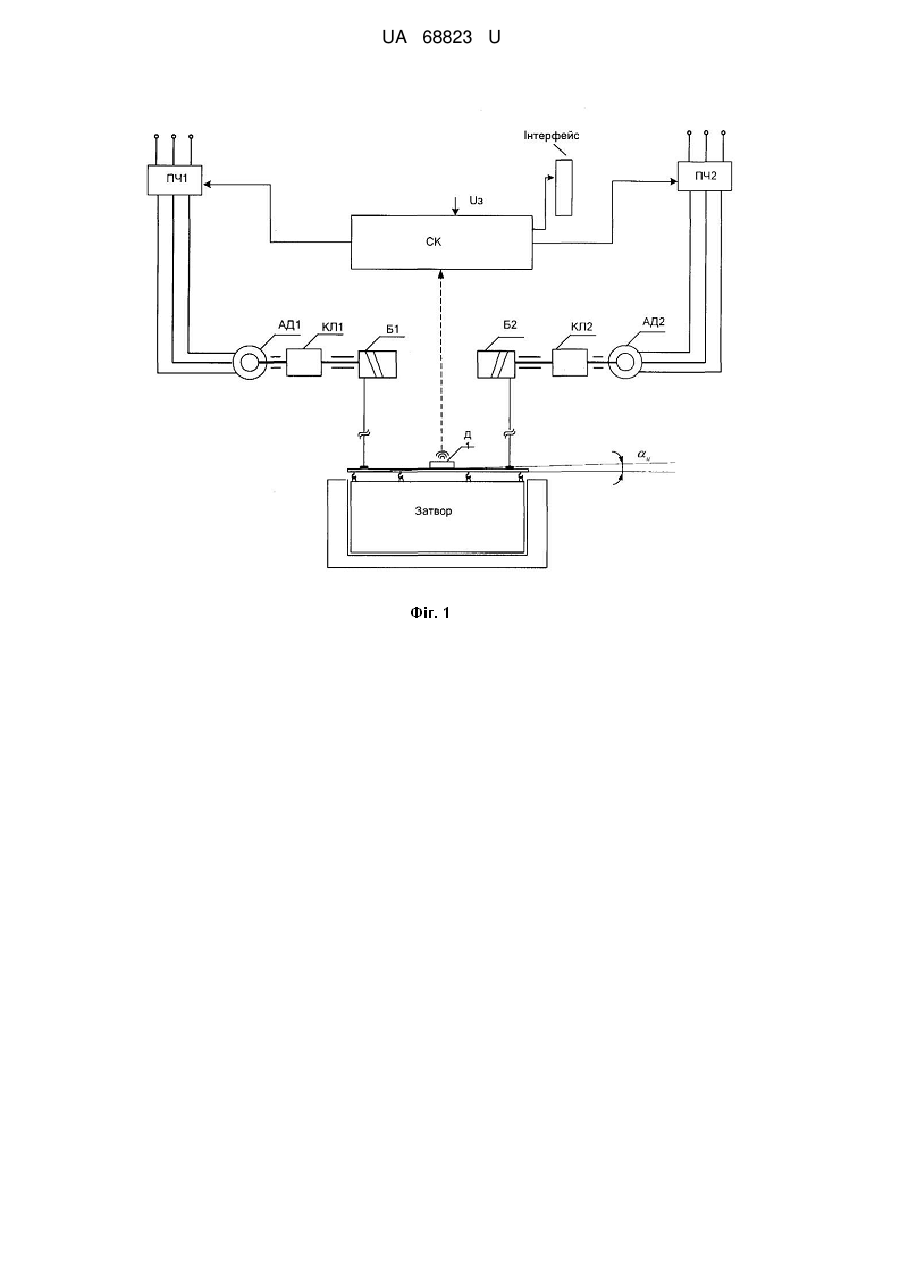
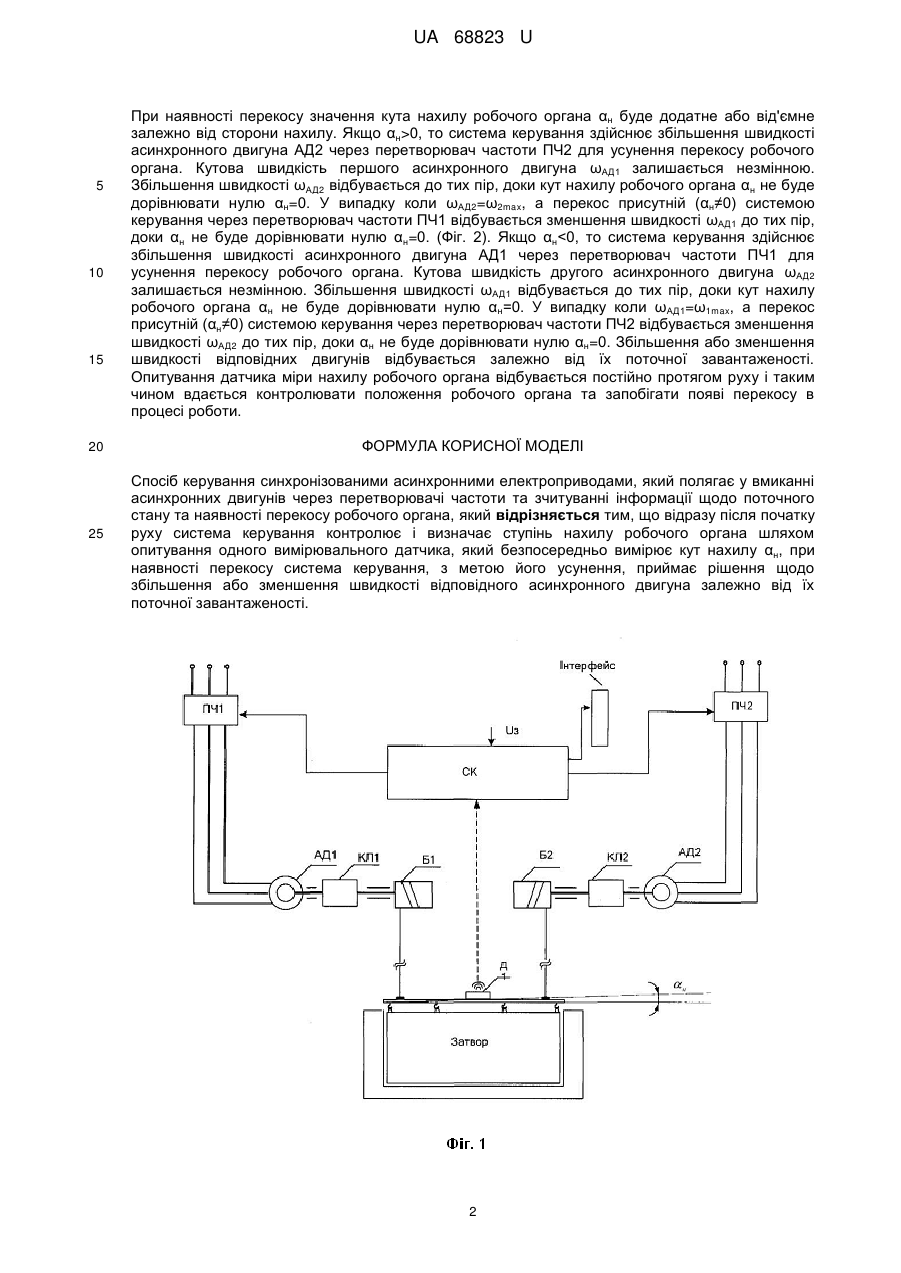
Реферат: Спосіб керування синхронізованими асинхронними електроприводами полягає у вмиканні асинхронних двигунів через перетворювачі частоти та зчитуванні інформації щодо поточного стану та наявності перекосу робочого органа. Відразу після початку руху система керування контролює і визначає ступінь нахилу робочого органа шляхом опитування одного вимірювального датчика, який безпосередньо вимірює кут нахилу αн, при наявності перекосу система керування, з метою його усунення, приймає рішення щодо збільшення або зменшення швидкості відповідного асинхронного двигуна залежно від їх поточної завантаженості. UA 68823 U (54) СПОСІБ КЕРУВАННЯ СИНХРОНІЗОВАНИМИ АСИНХРОННИМИ ЕЛЕКТРОПРИВОДАМИ UA 68823 U UA 68823 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель, що заявляється, належить до електротехніки, зокрема до синхронізованих асинхронних електроприводів та може бути використана для керування асинхронними двигунами технологічних механізмів, що потребують забезпечення синхронного обертання з метою усунення перекосу робочого органа. Технологічним механізмом з синхронізованим асинхронним електроприводом є козловий кран, що забезпечує підіймання/спускання затвору зливної греблі. При підійманні/спусканні затвору, встановленого в кишеню зливної греблі, особливо важливо забезпечити синхронне обертання двигунів кожної з підіймальних лебідок для запобігання можливості перекосу металоконструкції, що може привести до заклинювання виконавчого органа і неможливості здійснення технологічних операцій підіймання та встановлення затвору. При тривалій експлуатації змінюється значення жорсткості канатів, якщо зміна канатів на обох лебідках відбувається одночасно, то зміни однотипні. Як правило, на виробництві заміна канатів відбувається по мірі їх зносу і неодночасно на обох лебідках, що призводить до різниці в жорсткості канатів. А це в свою чергу викликає перекос затвору зливної греблі в процесі руху, випадання двигунів із синхронізму та аварійні режими роботи електроприводу затвору зливної греблі. Відома система узгодженого обертання асинхронних двигунів "зрівнювальний електричний вал" [Чиликин М, Г., Сандлер А.С. Общий курс электропривода: Учебник для вузов. - 6-е изд, доп. И перераб. – М.: Энергоиздат, 1981. - 576 с.], що містить два головних двигуна, вали яких механічно з'єднані з виробничим механізмом та з допоміжними зрівняльними машинами. Статорні обмотки зрівняльних машин паралельно приєднуються до мережі, а роторні обмотки ввімкнені між собою. Недоліками даної системи є: низьке значення ККД і надійності, висока коливальність і обмежена динамічна стійкість, відсутність будь-яких вимірювальних перетворювачів для контролю ступеню перекосу робочого органа в процесі руху. Суттєві ознаки, що збігаються із способом що заявляється: - синхронізація швидкості обертання приводних двигунів; - забезпечення рівномірного руху робочого органа. Найбільш близьким до способу, що заявляється, обраний в якості прототипу, є спосіб синхронізації елеткроприводів механізму пересування мостового крану запропонований фірмою ТОВ "Лифт-Комплект" [Технічна документація. Електронний ресурс: http://lift21.ru/convertercrane]. Спосіб полягає у зчитуванні системою керування інформації про ступінь перекошування конструкції моста крану в процесі пересування з чотирьох ультразвукових датчиків, та поданні керуючих сигналів завдання швидкості на кожен із двох перетворювачів частоти (частотно регульованих асинхронних електроприводів) для запобігання можливості перекосу моста крану в процесі роботи. Недоліком даного способу є використання великої кількості датчиків, що призводить до збільшення собівартості та зниження надійності електроприводу. Суттєві ознаки, що збігаються із способом що заявляється: - використання дводвигуного частотно-регульованого електроприводу; - усунення можливості перекосу за допомогою перетворювачів частоти на основі інформації зчитаної з вимірювальної апаратури; - вирівнювання положення робочого органа в процесі руху. В основу корисної моделі, що заявляється, поставлена задача запобігання аварійних режимів роботи, підвищення надійності і збільшення терміну служби синхронізованих асинхронних електроприводів. Поставлена задача вирішується тим, що синхронізація електроприводів механізму підіймання відбувається за допомогою перетворювачів частоти на підставі сигналів отриманих від нахиломіру, шляхом регулювання кутової швидкості обертання со асинхронних двигунів. Корисна модель пояснюється кресленнями, де на Фіг. 1 наведена схема реалізації способу керування синхронізованим асинхронним електроприводом, на якій прийняті позначення: ПЧ1, ПЧ2 - перетворювачі частоти асинхронних двигунів АД1, АД2; Б1, Б2 - барабани підіймальних лебідок; КЛ1 і КЛ2 - кінематичні ланцюги; Д1 - датчик контролюючий перекос конструкції в процесі підйому(нахиломір); СК - система керування. На Фіг. 2 наведений алгоритм роботи способу керування. Спосіб що заявляється реалізується наступним чином. Відбувається пуск приводних двигунів АД1, АД2 через перетворювачі частоти ПЧ1, ПЧ2 (Фіг. 1). Відразу після початку руху затвору зливної греблі система керування починає опитування датчика ступеня нахилу робочого органа Д1 (Фіг.1). Перевіряться рівність кута нахилу робочого органа нулю, якщо αн=0, то це вказує на відсутність перекосу і система керування продовжує опитування нахиломіру. 1 UA 68823 U 5 10 15 20 25 При наявності перекосу значення кута нахилу робочого органа αн буде додатне або від'ємне залежно від сторони нахилу. Якщо αн>0, то система керування здійснює збільшення швидкості асинхронного двигуна АД2 через перетворювач частоти ПЧ2 для усунення перекосу робочого органа. Кутова швидкість першого асинхронного двигуна ωАД1 залишається незмінною. Збільшення швидкості ωАД2 відбувається до тих пір, доки кут нахилу робочого органа αн не буде дорівнювати нулю αн=0. У випадку коли ωАД2=ω2max, а перекос присутній (αн≠0) системою керування через перетворювач частоти ПЧ1 відбувається зменшення швидкості ωАД1 до тих пір, доки αн не буде дорівнювати нулю αн=0. (Фіг. 2). Якщо αн
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for control of synchronized asynchronous motor
Автори англійськоюHladyr Andrii Ivanovych, Khrebtova Oksana Anatoliivna, Martsyniuk Vitalii Bohdanovych
Назва патенту російськоюСпособ управления синхронизированными асинхронными электроприводами
Автори російськоюГладыр Андрей Иванович, Хребтова Оксана Анатольевна, Марцинюк Виталий Богданович
МПК / Мітки
МПК: H02P 5/00
Мітки: керування, електроприводами, синхронізованими, спосіб, асинхронними
Код посилання
<a href="https://ua.patents.su/5-68823-sposib-keruvannya-sinkhronizovanimi-asinkhronnimi-elektroprivodami.html" target="_blank" rel="follow" title="База патентів України">Спосіб керування синхронізованими асинхронними електроприводами</a>
Спосіб керування взаємозв’язаними електроприводами руху чотириколісної конструкції
Номер патенту: 56746
Опубліковано: 25.01.2011
Автори: Орловський Ігор Анатолійович, Бут Юлія Сергіївна
МПК: H02P 5/46
Мітки: чотириколісної, руху, керування, конструкції, електроприводами, взаємозв'язаними, спосіб
Формула / Реферат:
Спосіб керування взаємозв'язаними електроприводами руху чотириколісної конструкції, що складається з задання керуючих сигналів на електроприводи, вимірювання їх повного вектора стану та формування керуючих сигналів на кожний електропривід, який відрізняється тим, що задають параметри руху центра мас конструкції (швидкість в напрямку руху, відхилення від цього напрямку, кут повороту конструкції відносно напряму руху), подають керуючий сигнал...
Спосіб розгону багатодвигунних конвеєрів, обладнаних асинхронними багатошвидкісними двигунами з короткозамкненим ротором
Номер патенту: 51980
Опубліковано: 16.12.2002
Автори: Лаптєв Анатолій Григорович, Косарєв Василь Васильович, Сергієв Андрій Володимирович, Мезніков Артур Володимирович, Стаднік Микола Іванович, Бочаров Костянтин Петрович
Мітки: короткозамкненим, розгону, багатошвидкісними, багатодвигунних, обладнаних, двигунами, асинхронними, ротором, конвеєрів, спосіб
Формула / Реферат:
Спосіб пуску (розгону) багатодвигунних конвеєрів, обладнаних двома і більше багатошвидкісними асинхронними двигунами з короткозамкненим ротором, обмотки статорів яких виконані незалежними або з переключенням полюсів для кожної проміжної й номінальної частоти обертання ротора, який відрізняється тим, що після досягнення першої проміжної частоти обертання ротора, якій відповідає перша проміжна швидкість руху тягового органа конвеєра (далі -...
Спосіб пуску (розгону) багатодвигунних конвеєрів, обладнаних асинхронними багатошвидкісними двигунами з короткозамкненим ротором
Номер патенту: 51980
Опубліковано: 17.01.2005
Автори: Бочаров Костянтин Петрович, Косарєв Василь Васильович, Стаднік Микола Іванович, Мезніков Артур Володимирович, Сергієв Андрій Володимирович, Лаптєв Анатолій Григорович
Мітки: асинхронними, спосіб, двигунами, обладнаних, багатошвидкісними, багатодвигунних, короткозамкненим, розгону, конвеєрів, ротором, пуску
Формула / Реферат:
Спосіб пуску (розгону) багатодвигунних конвеєрів, обладнаних двома і більше багатошвидкісними асинхронними двигунами з короткозамкненим ротором, обмотки статорів яких виконані незалежними або з переключенням полюсів для кожної проміжної й номінальної частоти обертання ротора, який відрізняється тим, що після досягнення першої проміжної частоти обертання ротора, якій відповідає перша проміжна швидкість руху тягового органа конвеєра (далі -...
Комплектний пристрій керування трифазними асинхронними електродвигунами з короткозамкненим ротором, вибухобезпечний
Номер патенту: 48393
Опубліковано: 15.06.2004
Автори: Сергієв Андрій Володимирович, Ведерніков Олександр Іванович, Мезніков Артур Володимирович, Стаднік Микола Іванович
МПК: H02H 11/00
Мітки: вибухобезпечний, ротором, комплектний, електродвигунами, керування, трифазними, короткозамкненим, пристрій, асинхронними
Формула / Реферат:
1. Комплектний пристрій керування трифазними асинхронними електродвигунами з короткозамкненим ротором, вибухобезпечний, що містить задану кількість виконавчих органів, блоків дистанційного керування, блоків контролю опору ізоляції силових приєднань, який відрізняється тим, що містить блок логіки, який оснащений відповідною програмою керування, принаймні один електродвигун з принаймні двома статорними обмотками, при цьому виходи блока логіки...
Пристрій керування трифазними асинхронними електродвигунами з короткозамкненим ротором
Номер патенту: 5815
Опубліковано: 15.03.2005
Автори: Полубєдов Микола Анатолійович, Стаднік Микола Іванович, Мезніков Артур Володимирович
МПК: H02P 6/00
Мітки: трифазними, асинхронними, ротором, пристрій, керування, електродвигунами, короткозамкненим
Формула / Реферат:
1. Пристрій керування трифазними асинхронними електродвигунами з короткозамкненим ротором, що містить блок силовий, що включає модуль силовий, зв'язаний з електродвигуном з n-ою кількістю статорних обмоток, при цьому в модулі силовому розміщена n-а кількість виконавчих органів і блок логіки, оснащений відповідною програмою керування електродвигуном з n-ою кількістю статорних обмоток, який відрізняється тим, що пристрій оснащений модулем...
Попередній патент: Циклон
Наступний патент: Пристрій для оцінки життєздатності кишечнику з товстокишковою непрохідністю
Випадковий патент: Комплексний спосіб технічної взаємодії під час учбового процесу для навчальних закладів