Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103709
Опубліковано: 25.12.2015
Автори: Толстолузька Олена Геннадіївна, Носик Андрій Михайлович, Сачук Ігор Іванович, Диптан Валентин Петрович, Курцева Тетяна Михайлівна, Коломійцев Олексій Володимирович, Луковський Олег Ярославович, Альошин Геннадій Васильович, Клівець Сергій Іванович, Коваль Володимир Валерійович
Формула / Реферат
Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, змішувачі, фільтри, фазову автопідстройку частоти на частоті міжмодових биттів, керуючий генератор, опорний генератор з частотою підставки ![]() , формувач імпульсів, схему I, формувач мірних імпульсів, лічильник, дешифратор, електронну обчислювальну машину, блок формування зображення та
, формувач імпульсів, схему I, формувач мірних імпульсів, лічильник, дешифратор, електронну обчислювальну машину, блок формування зображення та ![]() - введення опорної частоти
- введення опорної частоти ![]() від передавального лазера, який відрізняється тим, що додатково введено гіростабілізовану платформу.
від передавального лазера, який відрізняється тим, що додатково введено гіростабілізовану платформу.
Текст
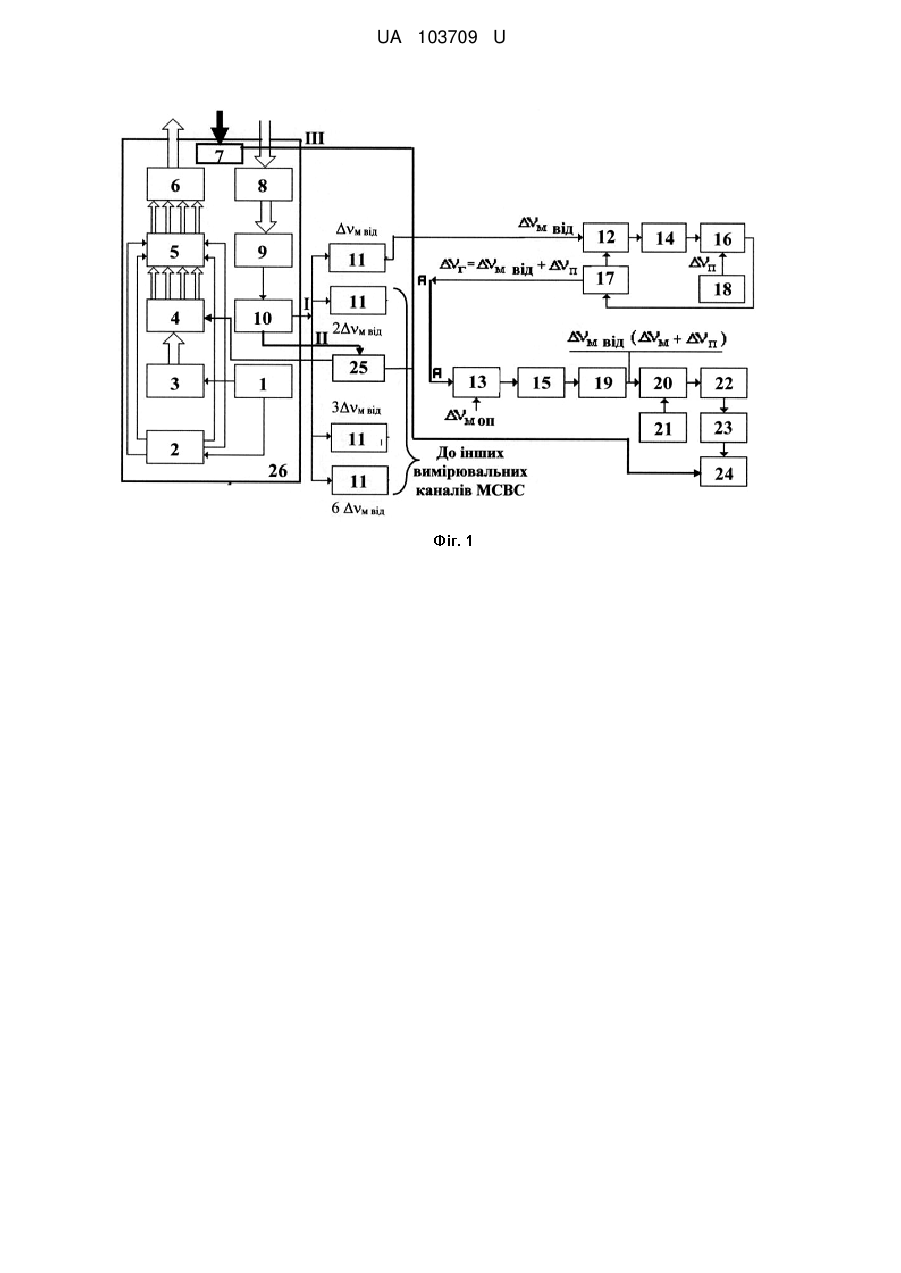
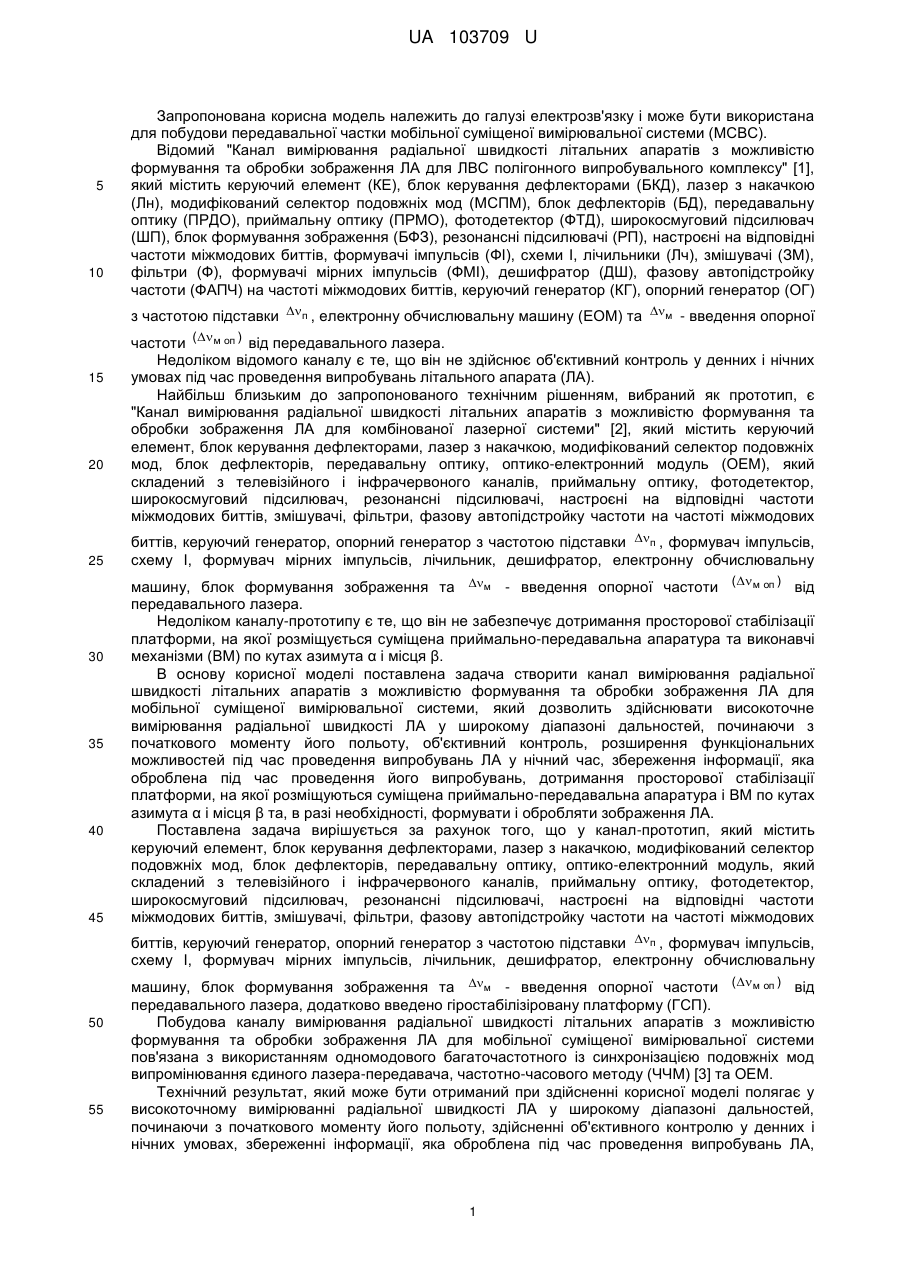
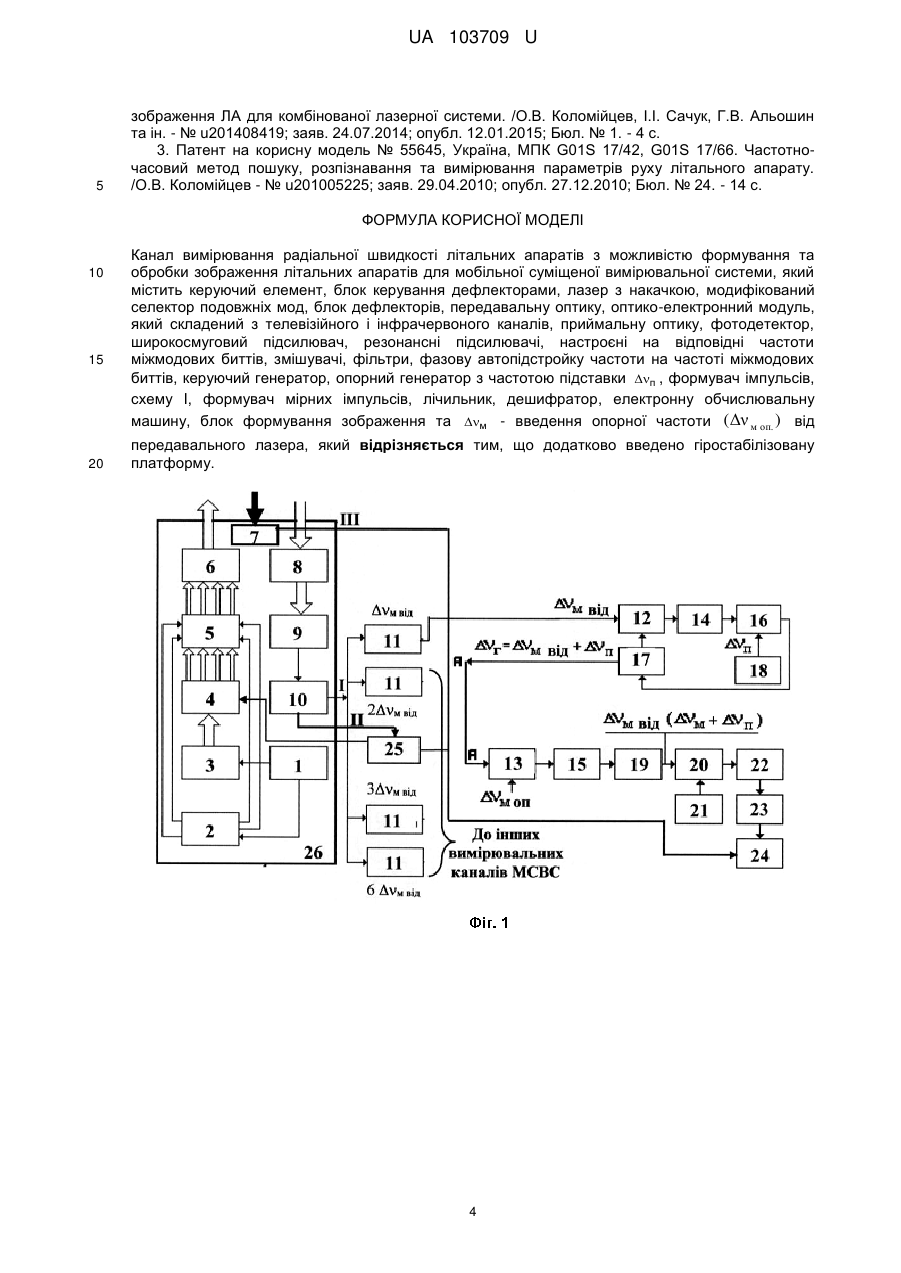
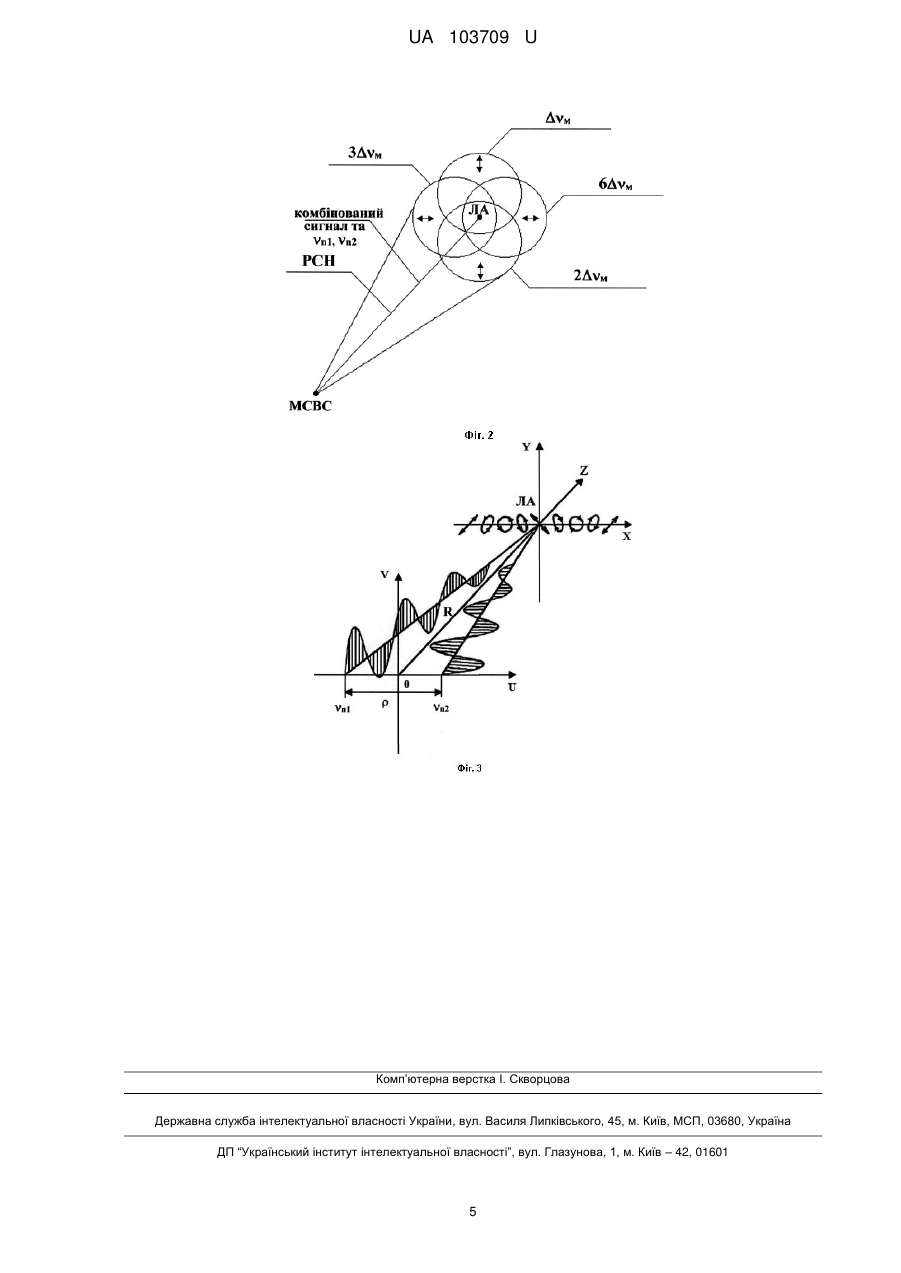
Реферат: Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для мобільної суміщеної вимірювальної системи, містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, змішувачі, фільтри, фазову автопідстройку частоти на частоті міжмодових биттів, керуючий генератор, опорний генератор з частотою підставки п , формувач імпульсів, схему I, формувач мірних імпульсів, лічильник, дешифратор, електронну обчислювальну машину, блок формування зображення та м - введення опорної частоти (Δν м оп. ) від передавального лазера. Додатково введено гіростабілізовану платформу. UA 103709 U (12) UA 103709 U UA 103709 U 5 10 Запропонована корисна модель належить до галузі електрозв'язку і може бути використана для побудови передавальної частки мобільної суміщеної вимірювальної системи (МСВС). Відомий "Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для ЛВС полігонного випробувального комплексу" [1], який містить керуючий елемент (КЕ), блок керування дефлекторами (БКД), лазер з накачкою (Лн), модифікований селектор подовжніх мод (МСПМ), блок дефлекторів (БД), передавальну оптику (ПРДО), приймальну оптику (ПРМО), фотодетектор (ФТД), широкосмуговий підсилювач (ШП), блок формування зображення (БФЗ), резонансні підсилювачі (РП), настроєні на відповідні частоти міжмодових биттів, формувачі імпульсів (ФІ), схеми I, лічильники (Лч), змішувачі (ЗМ), фільтри (Ф), формувачі мірних імпульсів (ФМІ), дешифратор (ДШ), фазову автопідстройку частоти (ФАПЧ) на частоті міжмодових биттів, керуючий генератор (КГ), опорний генератор (ОГ) з частотою підставки п , електронну обчислювальну машину (ЕОМ) та м - введення опорної 15 20 25 30 35 40 45 частоти ( м оп ) від передавального лазера. Недоліком відомого каналу є те, що він не здійснює об'єктивний контроль у денних і нічних умовах під час проведення випробувань літального апарата (ЛА). Найбільш близьким до запропонованого технічним рішенням, вибраний як прототип, є "Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для комбінованої лазерної системи" [2], який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль (OEM), який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, змішувачі, фільтри, фазову автопідстройку частоти на частоті міжмодових биттів, керуючий генератор, опорний генератор з частотою підставки п , формувач імпульсів, схему I, формувач мірних імпульсів, лічильник, дешифратор, електронну обчислювальну машину, блок формування зображення та м - введення опорної частоти ( м оп ) від передавального лазера. Недоліком каналу-прототипу є те, що він не забезпечує дотримання просторової стабілізації платформи, на якої розміщується суміщена приймально-передавальна апаратура та виконавчі механізми (ВМ) по кутах азимута α і місця β. В основу корисної моделі поставлена задача створити канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для мобільної суміщеної вимірювальної системи, який дозволить здійснювати високоточне вимірювання радіальної швидкості ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, об'єктивний контроль, розширення функціональних можливостей під час проведення випробувань ЛА у нічний час, збереження інформації, яка оброблена під час проведення його випробувань, дотримання просторової стабілізації платформи, на якої розміщуються суміщена приймально-передавальна апаратура і ВМ по кутах азимута α і місця β та, в разі необхідності, формувати і обробляти зображення ЛА. Поставлена задача вирішується за рахунок того, що у канал-прототип, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, змішувачі, фільтри, фазову автопідстройку частоти на частоті міжмодових биттів, керуючий генератор, опорний генератор з частотою підставки п , формувач імпульсів, схему I, формувач мірних імпульсів, лічильник, дешифратор, електронну обчислювальну 50 55 машину, блок формування зображення та м - введення опорної частоти ( м оп ) від передавального лазера, додатково введено гіростабілізіровану платформу (ГСП). Побудова каналу вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для мобільної суміщеної вимірювальної системи пов'язана з використанням одномодового багаточастотного із синхронізацією подовжніх мод випромінювання єдиного лазера-передавача, частотно-часового методу (ЧЧМ) [3] та OEM. Технічний результат, який може бути отриманий при здійсненні корисної моделі полягає у високоточному вимірюванні радіальної швидкості ЛА у широкому діапазоні дальностей, починаючи з початкового моменту його польоту, здійсненні об'єктивного контролю у денних і нічних умовах, збереженні інформації, яка оброблена під час проведення випробувань ЛА, 1 UA 103709 U 5 10 15 забезпеченні просторової стабілізації платформи, на якої розміщуються суміщена приймальнопередавальна апаратура і виконавчі механізми та, в разі необхідності, формуванні і обробки зображення ЛА. На фіг. 1 приведена узагальнена структурна схема запропонованого каналу, де: І вимірювальний сигнал; II - сигнал з просторовою модуляцією поляризації, III - комбінований сигнал у видимому і інфрачервоному діапазонах. На фіг. 2 приведено створення рівносигнального напрямку (РСН) та сканування 4-ма діаграмами спрямованості (ДС) лазерного випромінювання в ортогональних площинах. На фіг. 3 приведено створення лазерного сигналу з просторовою модуляцією поляризації. Запропонований канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для комбінованої лазерної системи містить керуючий елемент 1, блок керування дефлекторами 2, лазер з накачкою 3, модифікований селектор подовжніх мод 4, блок дефлекторів 5, передавальну оптику 6, оптико-електронний модуль 7, який складений з телевізійного і інфрачервоного каналів, приймальну оптику 8, фотодетектор 9, широкосмуговий підсилювач 10, резонансні підсилювачі 11, настроєні на відповідні частоти міжмодових биттів, змішувачі (ЗМ 1-12 і ЗМ 2-13), фільтри (Ф 1-14 і Ф 2-15), фазову автопідстройку частоти на частоті міжмодових биттів 16, керуючий генератор 17, опорний генератор 18 з частотою підставки п , формувач імпульсів 19, схему I 20, формувач мірних імпульсів 21, лічильник 22, дешифратор 23, електронну обчислювальну машину 24, блок 20 формування зображення 25, гіростабілізовану платформу 26 та м - введення опорної частоти ( м оп ) від передавального лазера. 25 30 Робота запропонованого каналу вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для мобільної суміщеної вимірювальної системи полягає у наступному. Із синхронізованого одномодового багаточастотного спектра випромінювання лазерапередавача (Лн) за допомогою МСПМ виділяються необхідні пари частот і окремі частоти для створення: рівносигнального напрямку на основі формування сумарної ДС лазерного випромінювання, завдяки 4-м парціальним ДС, що частково перетинаються, за умови використання комбінацій подовжніх мод ("підфарбованих" різницевими частотами міжмодових биттів): 54 5 4 м, 97 9 7 2м, 63 6 3 3м, 82 8 2 6м; - лазерного сигналу з просторовою модуляцією поляризації, за умови використання сигналу 35 40 45 50 з подовжньої моди n (в подальшому n1,n2 ). За допомогою МСПМ та блока формування зображення створюється лазерний сигнал з просторовою модуляцією поляризації шляхом розведення лазерного випромінювання (несучої частоти) на два променя з поворотом плоскості поляризації на кут 90° в одному з них (фіг. 3). При цьому випромінювання апертури першого і другого каналів в апертурної плоскості U0V рознесені на відстані . Різність ходу пучків до картинної площини ЛА Х0У змінюється вдовж осі X від точки до точки. Обумовлена цім різність фаз між поляризованими компонентами, що ортогональні, поля у картинній площині також змінюється від точки до точки. В залежності від різності фаз у картинній плоскості змінюється вигляд поляризації сумарного поля сигналу, що зондує від лінійної через еліптичну і циркулюючу до лінійної, ортогональної к начальної і т.д. Період зміни вигляду поляризації визначається базою між випромінювачами та відстанню до картинної плоскості R. Розподіл інтенсивності в реєстрованому зображенні ЛА промодульовано по гармонійному закону з коефіцієнтом модуляції, дорівнює значенню ступеня поляризації випромінювання, що відбито, в даній ділянці поверхні ЛА. Сигнал частот міжмодових биттів м ,2 м ,3 м та 6м надходить на блок дефлекторів, що складається з 4-х п'єзоелектричних дефлекторів. Парціальні ДС лазерного випромінювання попарно зустрічно сканують БД у кожній з двох ортогональних площин (фіг. 1, 2). Період сканування задається блоком керування дефлекторів, який разом з Лн живляться від керуючого елемента. Проходячи через ПРДО, груповий лазерний імпульсний сигнал пар частот 5 , 4 м, 9 , 7 2м, 6 , 3 3м та 8 , 2 6м фокусується в скановані точки простору, 55 оскільки здійснюється зустрічне сканування двома парами ДС лазерного випромінювання у 2 UA 103709 U кожній з двох ортогональних площин α і β (X і У), при цьому лазерний сигнал з просторовою 5 модуляцією поляризації ( n1 та n2 ) - проходить вдовж РСН (фіг. 2). Прийняті ПРМО від ЛА, відбиті в процесі сканування чотирьох ДС, лазерні імпульсні сигнали і огинаючи сигнали ДС лазерного випромінювання, за допомогою ФТД перетворюються в електричні імпульсні сигнали на різницевих частотах міжмодових биттів. Підсилені ШП вони розподіляються: - в БФЗ для обробки відбитого лазерного сигналу з просторовою модуляцією поляризації, що зондує, від поверхні ЛА; - по РП, що настроєні на відповідні частоти міжмодових биттів м від,2м від,3м від,6м від . 10 При цьому імпульсні сигнали радіочастоти, що надходять з РП 1 (РП м від ) формують 15 сигнал радіальної швидкості, а РП 2 (РП 2 м від ), РП 3 (РП 3 м від ) і РП 4 (РП 6 м від ) формують сигнали для інших вимірювальних каналів МСВС (фіг. 1). При відбитті лазерного сигналу з просторовою модуляцією поляризації, що зондує, від поверхні ЛА змінюються амплітудні і фазові співвідношення між ортогонально поляризаційними компонентами, параметри їх поляризаційні і, відповідно, комплексні коефіцієнти когерентності відбитого поля. Просторовий розподіл поляризаційних характеристик такого відбитого сигналу по зміні контрасту модуляційної структури зображення несе також інформацію про типи матеріалів у складі поверхні ЛА, їх характеристики і тощо, яка відображається у ЕОМ. Тому у БФЗ здійснюється поляризаційна обробка поля, що приймається. 20 На перший змішувач (ЗМ1) подається відбитий сигнал з частотою м від , який змішується через зворотній зв'язок зі сумішшю частот м від м п , від керуючого генератора та фільтрується (Ф1). У фазовій автопідстройці частоти на частоті міжмодових биттів цей сигнал змішується з 25 частотою п від опорного генератору. Отриманий сигнал з частотою г з виходу А керуючого генератора подається на вхід змішувача (ЗМ2), де змішується з опорною частотою м оп . Сигнал різницевої частоти м від (м м п ) , отриманий з виходу Ф2, через формувач імпульсів надходить на схему І. На лічильник проходить пачка імпульсів, обумовлена мірним інтервалом від ФМІ. Виділена дешифратором кількість рахункових імпульсів пропорційна 30 35 40 45 50 55 частоті м допл , перетворюється в ЕОМ у цифроаналоговий сигнал, що у цифровому вигляді відображає радіальну швидкість ЛА на цифровому табло. Оптико-електронний модуль постійно здійснює у денних і нічних умовах у видимому та інфрачервоному діапазонах спостереження за ЛА, який супроводжується. Відображення інформації, що приймається (передається) від ЛА, об'єктивний контроль та обробка (вимірювання) кутової швидкості відбувається в ЕОМ. Для збереження інформації, яка оброблена під час проведення випробувань ЛА, в пам'яті ЕОМ використовується база даних - сукупність взаємопов'язаних даних, організованих у відповідності до схеми даних таким чином, щоб з ними міг працювати користувач. Підвищення швидкості обробки інформації, яка поступає на ЕОМ здійснюється за рахунок використання технології синтезу часу параметризованих паралельних програм. Гіростабілізована платформа забезпечує дотримання просторової стабілізації платформи каналу, на якої розміщена суміщена приймально-передавальна апаратура та ВМ по кутах азимута α і місця β. Формування сумарної ДС лазерного випромінювання, створення РСН та каналу, що пропонується, пов'язано із задоволенням жорстких вимог, що пред'являються до спектра випромінювання одномодового багаточастотного лазера-передавача, тобто високоточної синхронізації подовжніх мод і стабілізації частот міжмодових биттів. Джерела інформації: 1. Патент на корисну модель № 75327, Україна, МПК G01S 17/42, G01S 17/66. Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для ЛВС полігонного випробувального комплексу. /О.В. Коломійцев, Г.В. Альошин, Д.Г. Васильєв та ін. - № u201206394; заяв. 28.05.2012; опубл. 26.11.2012; Бюл. № 22. -5с 2. Патент на корисну модель № 95925, Україна, MПK G01S 17/42, G01S 17/66. Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки 3 UA 103709 U 5 зображення ЛА для комбінованої лазерної системи. /О.В. Коломійцев, І.І. Сачук, Г.В. Альошин та ін. - № u201408419; заяв. 24.07.2014; опубл. 12.01.2015; Бюл. № 1. - 4 с. 3. Патент на корисну модель № 55645, Україна, МПК G01S 17/42, G01S 17/66. Частотночасовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарату. /О.В. Коломійцев - № u201005225; заяв. 29.04.2010; опубл. 27.12.2010; Бюл. № 24. - 14 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 10 15 20 Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, змішувачі, фільтри, фазову автопідстройку частоти на частоті міжмодових биттів, керуючий генератор, опорний генератор з частотою підставки п , формувач імпульсів, схему I, формувач мірних імпульсів, лічильник, дешифратор, електронну обчислювальну машину, блок формування зображення та м - введення опорної частоти (Δν м оп. ) від передавального лазера, який відрізняється тим, що додатково введено гіростабілізовану платформу. 4 UA 103709 U Комп’ютерна верстка І. Скворцова Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 17/42, G01S 11/04
Мітки: обробки, системі, канал, суміщеної, вимірювальної, формування, зображення, радіальної, літальних, мобільної, вимірювання, апаратів, можливістю, швидкості
Код посилання
<a href="https://ua.patents.su/7-103709-kanal-vimiryuvannya-radialno-shvidkosti-litalnikh-aparativ-z-mozhlivistyu-formuvannya-ta-obrobki-zobrazhennya-litalnikh-aparativ-dlya-mobilno-sumishheno-vimiryuvalno-sistemi.html" target="_blank" rel="follow" title="База патентів України">Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення літальних апаратів для мобільної суміщеної вимірювальної системи</a>
Канал вимірювання радіальної швидкості літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103673
Опубліковано: 25.12.2015
Автори: Рондін Юрій Петрович, Сачук Ігор Іванович, Максимчук Денис Олександрович, Поліщук Василь Володимирович, Салій Анатолій Григорович, Орлов Сергій Володимирович, Теребуха Іван Миколайович, Пєвцов Геннадій Володимирович, Носик Андрій Михайлович, Коломійцев Олексій Володимирович
МПК: G01S 17/42
Мітки: канал, вимірювальної, літальних, розпізнавання, мобільної, системі, радіальної, вимірювання, можливістю, суміщеної, швидкості, апаратів
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів з можливістю розпізнавання літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач,...
Канал вимірювання похилої дальності до літальних апаратів з можливістю формування та обробки зображення літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103704
Опубліковано: 25.12.2015
Автори: Сачук Ігор Іванович, Коломійцев Олексій Володимирович, Альошин Геннадій Васильович, Носик Андрій Михайлович, Луковський Олег Ярославович, Клівець Сергій Іванович, Толстолузька Олена Геннадіївна, Шулежко Василь Володимирович, Коваль Володимир Валерійович, Рєзнік Дмитро Вікторович
МПК: G01S 17/42, G01S 11/04
Мітки: дальності, канал, вимірювальної, мобільної, літальних, формування, суміщеної, похило, апаратів, вимірювання, системі, можливістю, обробки, зображення
Формула / Реферат:
Канал вимірювання похилої дальності до літальних апаратів з можливістю формування та обробки зображення літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, призми для частоти міжмодових биттів Δnм, блок дефлекторів, перемикач для частот міжмодових биттів Δnм і 2Δnм, передавальну оптику,...
Канал вимірювання радіальної швидкості літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 102602
Опубліковано: 10.11.2015
Автори: Сачук Ігор Іванович, Орлов Сергій Володимирович, Руденко Дмитро Васильович, Альошин Геннадій Васильович, Батуринський Мирослав Павлович, Павлій Владислав Олександрович, Коломійцев Олексій Володимирович, Носик Андрій Михайлович, Поляков Андрій Валентинович, Третяк В'ячеслав Федорович
МПК: G01S 11/04, G01S 17/42
Мітки: швидкості, літальних, канал, системі, вимірювальної, радіальної, суміщеної, апаратів, вимірювання, мобільної
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, селектор подовжніх мод, модифікований блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складений з телевізійного і інфрачервоного каналів, приймальну оптику, фотодетектор, широкосмуговий підсилювач,резонансні підсилювачі, настроєні на...
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення літальних апаратів для мобільної суміщеної вимірювальної системи
Номер патенту: 103702
Опубліковано: 25.12.2015
Автори: Луковський Олег Ярославович, Носик Андрій Михайлович, Толстолузька Олена Геннадіївна, Коломійцев Олексій Володимирович, Сачук Ігор Іванович, Сосунов Олександр Олексійович, Коваль Володимир Валерійович, Альошин Геннадій Васильович, Клівець Сергій Іванович, Ряшин Володимир Валерійович
МПК: G01S 17/66, G01S 17/42
Мітки: можливістю, напрямком, канал, мобільної, зображення, вимірювальної, формування, апаратів, обробки, літальних, автоматичного, супроводження, системі, суміщеної
Формула / Реферат:
Канал автоматичного супроводження літальних апаратів за напрямком з можливістю формування та обробки зображення ЛА для мобільної суміщеної вимірювальної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, оптико-електронний модуль, який складається з телевізійного і інфрачервоного каналів, приймальної оптики, фотодетектора,...
Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ла для комбінованої лазерної системи
Номер патенту: 95925
Опубліковано: 12.01.2015
Автори: Захарченко Ірина Вікторівна, Коломійцев Олексій Володимирович, Сачук Ігор Іванович, Грідіна Валентина Вікторівна, Орлов Сергій Володимирович, Паталаха Валерій Григорович, Альошин Геннадій Васильович, Селезньов Сергій Володимирович, Носик Андрій Михайлович, Закіров Сергій Вікторович
МПК: G01S 11/00, G01S 17/42
Мітки: системі, літальних, обробки, радіальної, зображення, можливістю, апаратів, формування, комбінованої, швидкості, канал, лазерної, вимірювання
Формула / Реферат:
Канал вимірювання радіальної швидкості літальних апаратів з можливістю формування та обробки зображення ЛА для комбінованої лазерної системи, який містить керуючий елемент, блок керування дефлекторами, лазер з накачкою, модифікований селектор подовжніх мод, блок дефлекторів, передавальну оптику, приймальну оптику, фотодетектор, широкосмуговий підсилювач, резонансні підсилювачі, настроєні на відповідні частоти міжмодових биттів, змішувачі,...
Попередній патент: Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора
Наступний патент: Спосіб лікування та профілактики ускладнень у вагітних з варикозною хворобою
Випадковий патент: Спосіб визначення вмісту складових зернових