Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора
Номер патенту: 103708
Опубліковано: 25.12.2015
Автори: Калінов Андрій Петрович, Кочуров Ілля Михайлович, Мельников Вячеслав Олександрович

Формула / Реферат
1. Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора, який включає незалежне формування активної та реактивної складової вектора струму статора, в якому використовують пристрої виміру потокозчеплення фаз ротора, який дозволяє здійснювати примусову взаємну орієнтацію вектора струму статора і потокозчеплення ротора, в якому використовують окремі контури регулювання за кожною фазою двигуна, який відрізняється тим, що в обертовій ортогональній системі координат відбувається задання тільки активної складової струму, що перетворюють до трифазної системи координат, задання потокозчеплень здійснюють в трифазній системі координат з можливістю регулювання потокозчеплення окремої фази, після регуляторів потокозчеплення сформовані сигнали задання реактивного струму підсумовують з сигналами задання активного струму і утворюють сигнали задання струму фаз статора, після чого вони надходять до регуляторів струму та формують сигнали задання напруг кожної фази двигуна.
2. Спосіб за п. 1, який відрізняється тим, що використовують спостерігач швидкості ротора, в якому розрахунок швидкості обертання ротора здійснюють на основі виміряних сигналів фазних струмів і напруг.
Текст
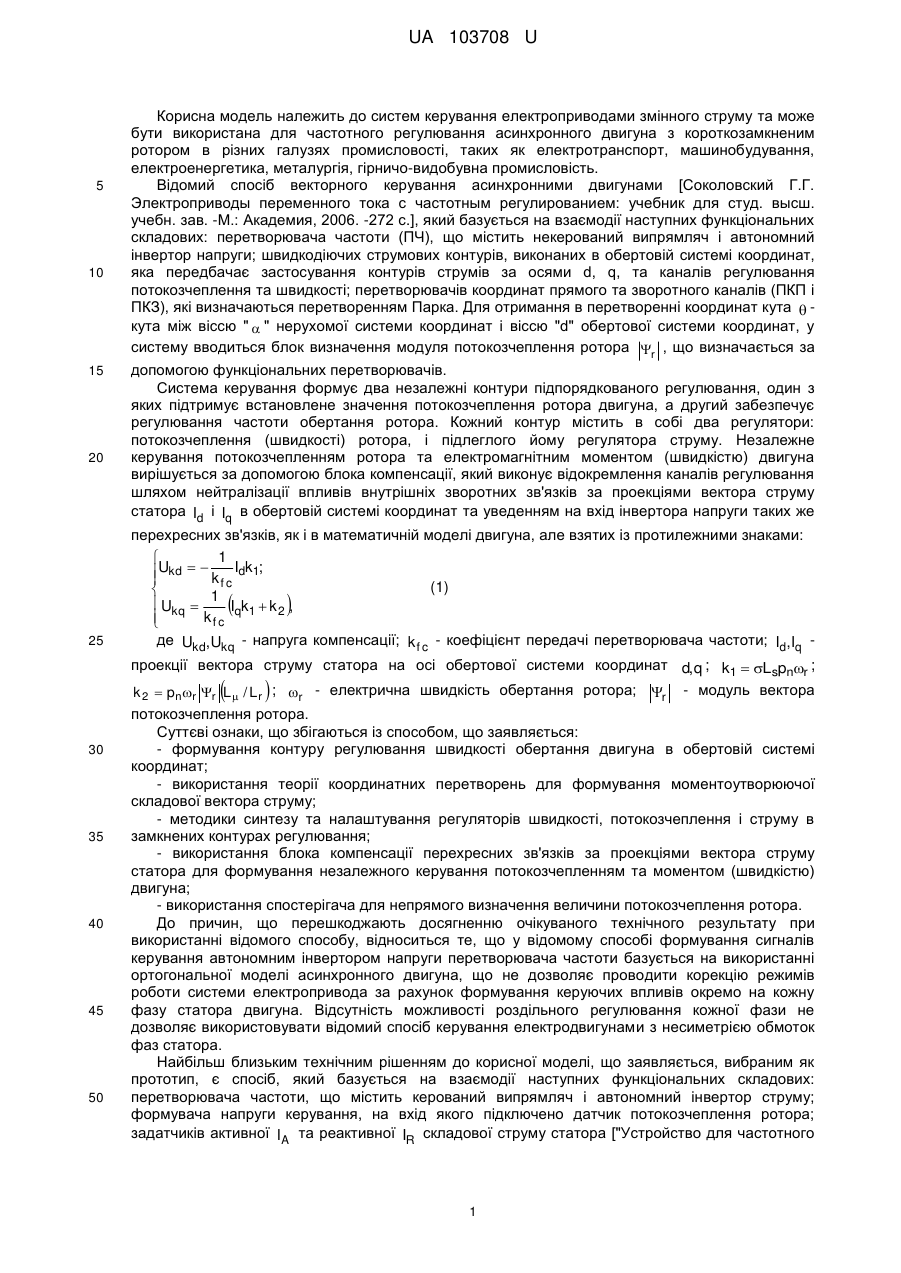
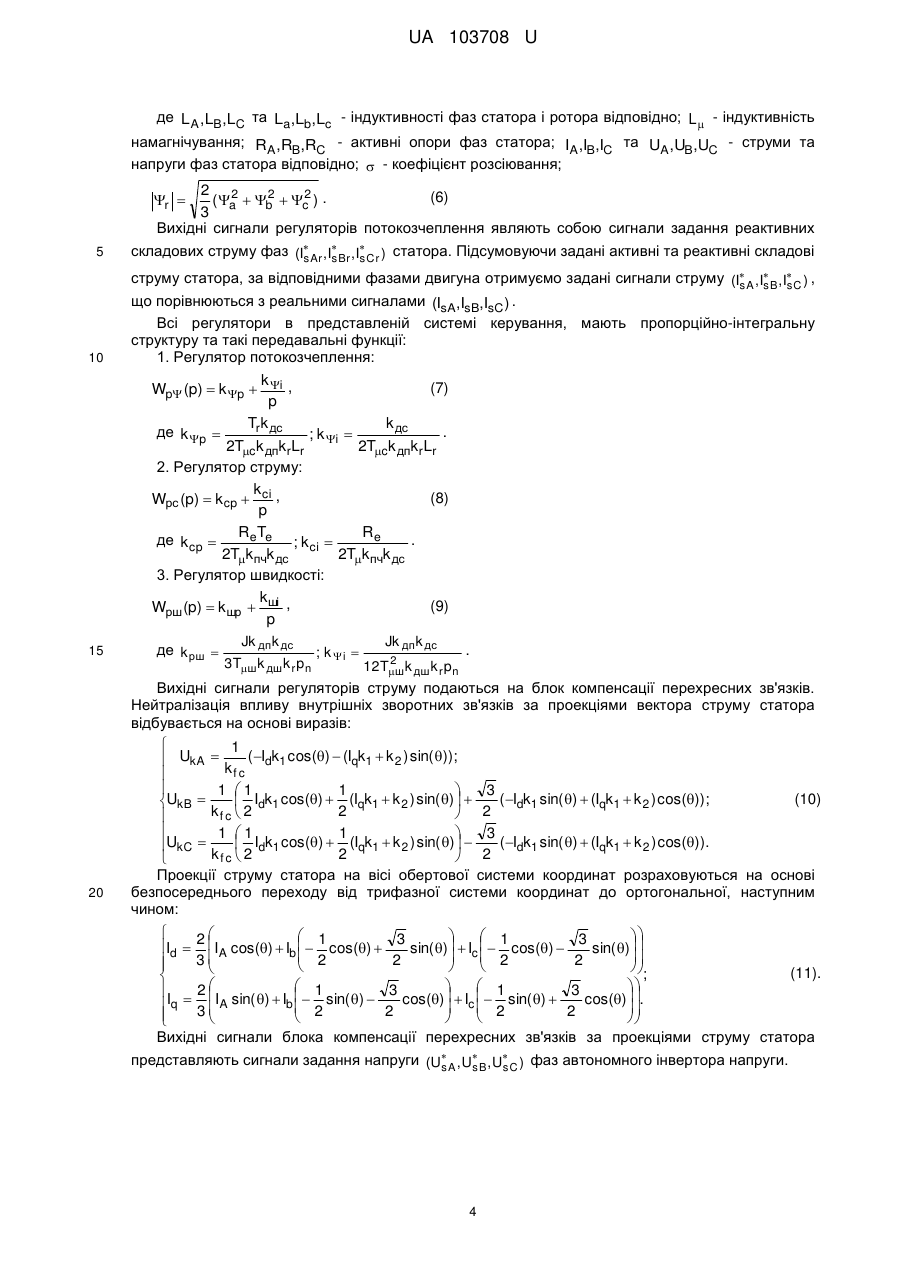
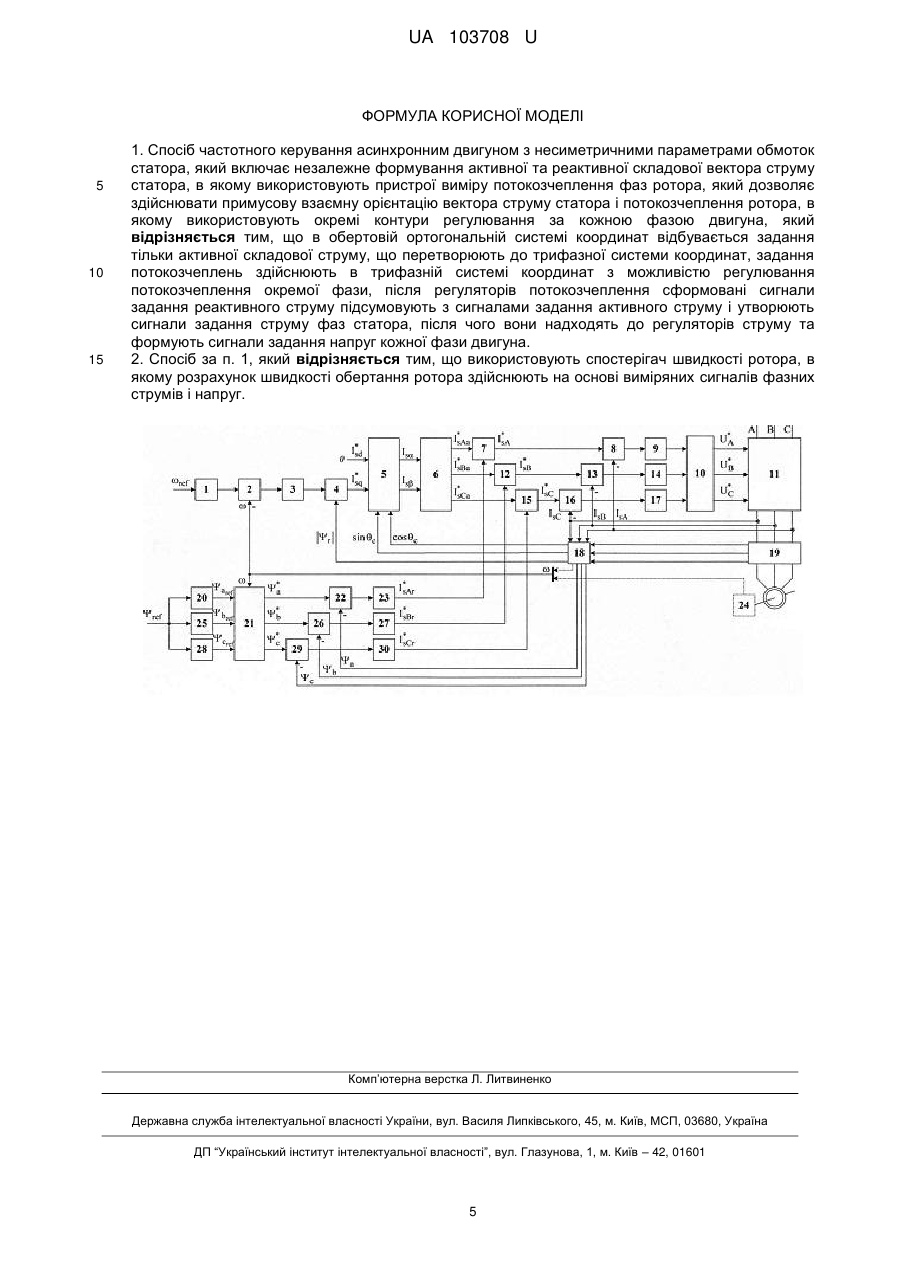
Реферат: Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора включає незалежне формування активної та реактивної складової вектора струму статора, в якому використовують пристрої виміру потокозчеплення фаз ротора, який дозволяє здійснювати примусову взаємну орієнтацію вектора струму статора і потокозчеплення ротора, в якому використовують окремі контури регулювання за кожною фазою двигуна. В обертовій ортогональній системі координат відбувається задання тільки активної складової струму, що перетворюють до трифазної системи координат, задання потокозчеплень здійснюють в трифазній системі координат з можливістю регулювання потокозчеплення окремої фази, після регуляторів потокозчеплення сформовані сигнали задання реактивного струму підсумовують з сигналами задання активного струму і утворюють сигнали задання струму фаз статора, після чого вони поступають до регуляторів струму та формують сигнали задання напруг кожної фази двигуна. UA 103708 U (12) UA 103708 U UA 103708 U 5 10 15 20 Корисна модель належить до систем керування електроприводами змінного струму та може бути використана для частотного регулювання асинхронного двигуна з короткозамкненим ротором в різних галузях промисловості, таких як електротранспорт, машинобудування, електроенергетика, металургія, гірничо-видобувна промисловість. Відомий спосіб векторного керування асинхронними двигунами [Соколовский Г.Г. Электроприводы переменного тока с частотным регулированием: учебник для студ. высш. учебн. зав. -М.: Академия, 2006. -272 с.], який базується на взаємодії наступних функціональних складових: перетворювача частоти (ПЧ), що містить некерований випрямляч і автономний інвертор напруги; швидкодіючих струмових контурів, виконаних в обертовій системі координат, яка передбачає застосування контурів струмів за осями d, q, та каналів регулювання потокозчеплення та швидкості; перетворювачів координат прямого та зворотного каналів (ПКП і ПКЗ), які визначаються перетворенням Парка. Для отримання в перетворенні координат кута кута між віссю " " нерухомої системи координат і віссю "d" обертової системи координат, у систему вводиться блок визначення модуля потокозчеплення ротора r , що визначається за допомогою функціональних перетворювачів. Система керування формує два незалежні контури підпорядкованого регулювання, один з яких підтримує встановлене значення потокозчеплення ротора двигуна, а другий забезпечує регулювання частоти обертання ротора. Кожний контур містить в собі два регулятори: потокозчеплення (швидкості) ротора, і підлеглого йому регулятора струму. Незалежне керування потокозчепленням ротора та електромагнітним моментом (швидкістю) двигуна вирішується за допомогою блока компенсації, який виконує відокремлення каналів регулювання шляхом нейтралізації впливів внутрішніх зворотних зв'язків за проекціями вектора струму статора Id і Iq в обертовій системі координат та уведенням на вхід інвертора напруги таких же перехресних зв'язків, як і в математичній моделі двигуна, але взятих із протилежними знаками: 1 Ukd k Idk1; fc (1) 1 Ukq Iqk1 k 2 , kf c де Ukd, Ukq - напруга компенсації; k f c - коефіцієнт передачі перетворювача частоти; Id ,Iq 25 проекції вектора струму статора на осі обертової системи координат d, q ; k1 Lspnr ; k 2 pnr r L / Lr ; r - електрична швидкість обертання ротора; r - модуль вектора 30 35 40 45 50 потокозчеплення ротора. Суттєві ознаки, що збігаються із способом, що заявляється: - формування контуру регулювання швидкості обертання двигуна в обертовій системі координат; - використання теорії координатних перетворень для формування моментоутворюючої складової вектора струму; - методики синтезу та налаштування регуляторів швидкості, потокозчеплення і струму в замкнених контурах регулювання; - використання блока компенсації перехресних зв'язків за проекціями вектора струму статора для формування незалежного керування потокозчепленням та моментом (швидкістю) двигуна; - використання спостерігача для непрямого визначення величини потокозчеплення ротора. До причин, що перешкоджають досягненню очікуваного технічного результату при використанні відомого способу, відноситься те, що у відомому способі формування сигналів керування автономним інвертором напруги перетворювача частоти базується на використанні ортогональної моделі асинхронного двигуна, що не дозволяє проводити корекцію режимів роботи системи електропривода за рахунок формування керуючих впливів окремо на кожну фазу статора двигуна. Відсутність можливості роздільного регулювання кожної фази не дозволяє використовувати відомий спосіб керування електродвигунами з несиметрією обмоток фаз статора. Найбільш близьким технічним рішенням до корисної моделі, що заявляється, вибраним як прототип, є спосіб, який базується на взаємодії наступних функціональних складових: перетворювача частоти, що містить керований випрямляч і автономний інвертор струму; формувача напруги керування, на вхід якого підключено датчик потокозчеплення ротора; задатчиків активної IA та реактивної IR складової струму статора ["Устройство для частотного 1 UA 103708 U 5 10 15 20 25 30 35 40 45 50 55 управления асинхронным двигателем" Патент СРСР № 744887. / Ю.М. Гусяцкий, В.Ф. Гельдман]. Згідно з даним технічним рішенням задане значення модуля результуючого вектора струму забезпечується регулятором струму, на вході якого порівнюється сигнал задання струму з сигналом датчика зворотного зв'язку за струмом статора двигуна, та який формує сигнали керування керованим випрямлячем. Аргумент результуючого вектора струму (частота та фаза струму) двигуна при живленні від інвертора струму визначається моментами подачі імпульсів керування на ключі автономного інвертора струму з виходу блока керування. Дана властивість автономного інвертора струму дозволяє здійснювати примусову взаємну орієнтацію вектора струму статора та потокозчеплення ротора двигуна без використання векторного аналізатора та перетворювача координат. Відповідно до чого IA I sin, IR I cos , де - кут між першими гармоніками струму статора та потокозчеплення ротора відповідної фази двигуна. Таким чином сигнал задання IR в статичних та динамічних режимах визначає проекцію струму статора та напрям вектора потокозчеплення ротора, а сигнал IA - ортогональну складову струму двигуна. При цьому використання сигналів потокозчепленням трьох фаз ротора дозволяє реалізувати три незалежні канали регулювання, які дозволяють формувати напругу задання інвертора для кожної фази окремо. Суттєві ознаки, що збігаються із способом, що заявляється: - незалежне формування активної та реактивної складових вектора струму фаз статора асинхронного двигуна; - використання пристроїв виміру чи розрахунку потокозчеплення фаз ротора; - примусова взаємна орієнтація вектора струму статора та потокозчеплення ротора двигуна без використання векторного аналізатора та перетворювача координат; - використання окремих контурів регулювання для формування напруги задання кожної фази двигуна. До причин, що перешкоджають досягненню очікуваного технічного результату при використанні даного способу, належить те, що при даному способі керування неможливо формувати потокозчеплення кожної фази окремо через відсутність регуляторів потокозчеплень. Також недоліком зазначеного способу є те, що сигнали задання проекцій вектора струму формуються однаковими для усіх фаз і немає можливості задавати їх для кожної фази незалежно. В основу корисної моделі поставлена задача підвищення якості регулювання вихідних координат асинхронного двигуна у несиметричному режимі роботи двигуна, а також компенсації впливу несиметрії обмоток статора на енергетичні показники електропривода. Це досягається шляхом формування сигналів керування автономним інвертором напруги за кожною фазою двигуна окремо. Поставлена задача вирішується тим, що спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора, який включає незалежно формувати активну та реактивну складову вектора струму статора, в якому використовують пристрої виміру потокозчеплення фаз ротора, який дозволяє здійснювати примусову взаємну орієнтацію вектора струму статора і потокозчеплення ротора, в якому використовують окремі контури регулювання за кожною фазою двигуна. Додатково в обертовій ортогональній системі координат відбувається задання тільки активної складової струму, що перетворюють до трифазної системи координат, задання потокозчеплень здійснюють в трифазній системі координат з можливістю регулювання потокозчеплення окремої фази, після регуляторів потокозчеплення сформовані сигнали задання реактивного струму підсумовують з сигналами задання активного струму і утворюють сигнали задання струму фаз статора, після чого вони поступають до регуляторів струму та формують сигнали задання напруг кожної фази двигуна. Суть корисної моделі пояснює креслення. На кресленні наведено функціональну схему системи векторного керування з компенсацією впливу несиметрії обмоток статора з використанням наступних позначень: 1 - задатчик інтенсивності швидкості; 2, 7, 8, 12, 13, 15, 16, 22, 26, 29 - суматори; 3 - регулятор швидкості; 4 блок ділення; 5, 6 - перетворювачі координат; 9, 14, 17 - регулятори струму; 10 - блок компенсації; 11 - перетворювач частоти; 18 - спостерігач; 19 - блок датчиків напруги; 20, 25, 28 блоки коригувальних коефіцієнтів; 21 - блок формування трифазного сигналу задання потокозчеплення; 23, 27, 30 - регулятори потокозчеплення; 24 - датчик швидкості; ref - сигнал задання швидкості; - сигнал зворотного зв'язку за швидкістю; I ,I - сигнали задання sd sq проекцій вектора струму в обертовій ортогональній системі координат; Is ,Is - сигнали задання 2 UA 103708 U проекцій вектора струму в нерухомій ортогональній системі координат; I ,I ,I sAa sBa sCa - сигнали задання активних складових струму в трифазній системі координат; I ,I ,I sAr sBr sCr - сигнали задання реактивних складових струму в трифазній системі координат, I ,I ,I - сигнали sA sB sC задання струму в трифазній системі координат; IsA,IsB,IsC - сигнали зворотного зв'язку за 5 струмами фаз статора; U ,UB ,U - сигнали задання напруги інвертора; A,B, C - найменування A C фаз мережі; c - кут між нерухомою та обертовою ортогональними системами координат; r величина модуля потокозчеплення ротора; ref - сигнал задання потокозчеплення ротора; - сигнали задання потокозчеплень фаз ротора з урахуванням коригувальних a , b , c ref 10 15 ref ref коефіцієнтів; a , b , c - сигнали задання потокозчеплень фаз ротора в трифазній нерухомій системі координат; a, b, c - сигнали зворотних зв'язків за потокозчепленням ротора. Спосіб реалізується наступним чином. У запропонованому способі контур регулювання швидкості двигуна виконується в обертовій системі координат d, q . Сигнал зворотного зв'язку за швидкістю надходить з датчика швидкості (креслення, блок 24) або розраховується за допомогою спостерігача (креслення, блок 18). Розділення вихідного сигналу регулятора швидкості на модуль потокозчеплення ротора (креслення, блок 4) дозволяє отримати сигнал задання активної складової струму (I ) статора, значення якої за допомогою координатних sq перетворювачів перетворюється на трифазну (I ,I ,I ) систему координат в два етапи. sAa sBa sCa Перехід від обертової до нерухомої ортогональної системи координат (креслення, блок 5) відбувається за наступними виразами: Is cos sin 0 (2) , Is sin cos Isq 20 де - кут повороту координатної системи d, q відносно нерухомої , . Перетворення сигналів від нерухомої до трифазної системи координат (креслення, блок 6) здійснюється відповідно до виразів: I sAa 1 I 1 sBa 2 I sCa 25 0 3 2 1 I s . 1 Is (3) Регулювання потокозчеплення відбувається за кожною фазою окремо. У даному випадку множення сигналу задання потокозчеплення ( ref ) на корегувальні коефіцієнти (a, b, c , креслення, блоки 20, 25, 28) дозволяє змінювати амплітудне значення потокозчеплення ( a , b , c ) у кожній фазі двигуна. Коефіцієнти корегування задання потокозчеплення ref ref ref визначаються наступним чином: w d , (4) wq де w d - кількість витків у пошкодженій фазі статора; w q - кількість витків у справній фазі. Перемноження даних коефіцієнтів на сигнали сформованої системи трифазних синусоїдних 30 впливів дозволяє отримати сигнали задання потокозчеплення ( a , b , c ) . Для реалізації зворотних зв'язків за потокозчепленням використовується спостерігач (креслення, блок 18), в якому розраховуються потокозчеплення фаз ротора (5) та модуль вектора потокозчеплення (6). da L a dI (UA R AIA L A A ); dt L dt db Lb dIB (UB RBIB LB ); L dt dt dc L c dI (UC RCIC L C C ), L dt dt (5) 3 UA 103708 U де L A ,LB,LC та La,Lb,Lc - індуктивності фаз статора і ротора відповідно; L - індуктивність намагнічування; RA ,RB,RC - активні опори фаз статора; IA ,IB,IC та UA ,UB,UC - струми та напруги фаз статора відповідно; - коефіцієнт розсіювання; 2 2 2 2 (6) ( a b c ) . 3 Вихідні сигнали регуляторів потокозчеплення являють собою сигнали задання реактивних r 5 10 15 20 складових струму фаз (I ,I ,I ) статора. Підсумовуючи задані активні та реактивні складові sAr sBr sCr струму статора, за відповідними фазами двигуна отримуємо задані сигнали струму (I ,I ,I ) , sA sB sC що порівнюються з реальними сигналами (IsA,IsB,IsC ) . Всі регулятори в представленій системі керування, мають пропорційно-інтегральну структуру та такі передавальні функції: 1. Регулятор потокозчеплення: k (7) Wp (p) k p i , p Tr k дс k дс де k p . ; k i 2Tc k дпk rLr 2Tc k дпk rLr 2. Регулятор струму: k (8) Wрс (p) k cp ci , p Re де k cp ReTe ; k ci . 2Tk пчk дс 2Tk пчk дс 3. Регулятор швидкості: k (9) Wрш (p) k шр шi , p Jk дпk дс Jk дпk дс де k рш . ; k i 2 3Tшk дшk r pn 12Tшk дшk r pn Вихідні сигнали регуляторів струму подаються на блок компенсації перехресних зв'язків. Нейтралізація впливу внутрішніх зворотних зв'язків за проекціями вектора струму статора відбувається на основі виразів: 1 ( Idk1 cos() (Iqk1 k 2 ) sin( )); UkA kf c 1 1 1 3 (10) ( Idk1 sin( ) (Iqk1 k 2 ) cos()); Idk1 cos() (Iqk1 k 2 ) sin( ) UkB kf c 2 2 2 1 1 1 3 ( Idk1 sin( ) (Iqk1 k 2 ) cos()). Idk1 cos() (Iqk1 k 2 ) sin( ) UkC kf c 2 2 2 Проекції струму статора на вісі обертової системи координат розраховуються на основі безпосереднього переходу від трифазної системи координат до ортогональної, наступним чином: 1 1 2 3 3 Id IA cos() Ib cos() sin( ) Ic cos() sin( ) 2 2 3 2 2 (11). ; 1 1 2 3 3 Iq 3 IA sin( ) Ib 2 sin( ) 2 cos() Ic 2 sin( ) 2 cos() . Вихідні сигнали блока компенсації перехресних зв'язків за проекціями струму статора представляють сигнали задання напруги (U , U , U ) фаз автономного інвертора напруги. sA sB sC 4 UA 103708 U ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 1. Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора, який включає незалежне формування активної та реактивної складової вектора струму статора, в якому використовують пристрої виміру потокозчеплення фаз ротора, який дозволяє здійснювати примусову взаємну орієнтацію вектора струму статора і потокозчеплення ротора, в якому використовують окремі контури регулювання за кожною фазою двигуна, який відрізняється тим, що в обертовій ортогональній системі координат відбувається задання тільки активної складової струму, що перетворюють до трифазної системи координат, задання потокозчеплень здійснюють в трифазній системі координат з можливістю регулювання потокозчеплення окремої фази, після регуляторів потокозчеплення сформовані сигнали задання реактивного струму підсумовують з сигналами задання активного струму і утворюють сигнали задання струму фаз статора, після чого вони надходять до регуляторів струму та формують сигнали задання напруг кожної фази двигуна. 2. Спосіб за п. 1, який відрізняється тим, що використовують спостерігач швидкості ротора, в якому розрахунок швидкості обертання ротора здійснюють на основі виміряних сигналів фазних струмів і напруг. Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: H02P 21/00
Мітки: двигуном, асинхронним, керування, статора, обмоток, спосіб, несиметричними, частотного, параметрами
Код посилання
<a href="https://ua.patents.su/7-103708-sposib-chastotnogo-keruvannya-asinkhronnim-dvigunom-z-nesimetrichnimi-parametrami-obmotok-statora.html" target="_blank" rel="follow" title="База патентів України">Спосіб частотного керування асинхронним двигуном з несиметричними параметрами обмоток статора</a>
Спосіб адаптивного частотного керування асинхронним двигуном
Номер патенту: 68806
Опубліковано: 10.04.2012
Автори: Петрикович Юрій Ярославович, Луцик Ірина Богданівна, Федорейко Валерій Степанович, Рутило Микола Іванович, Іскерський Іван Станіславович
МПК: H02P 1/26
Мітки: асинхронним, частотного, спосіб, двигуном, керування, адаптивного
Формула / Реферат:
Спосіб адаптивного частотного керування асинхронним електродвигуном, що забезпечує енергоефективне його регулювання шляхом формування оптимальної величини напруги статора, який відрізняється тим, що ця величина розраховується за відхиленням напруги, яке пропорційне різниці активної і реактивної складових потужності електродвигуна, в залежності від його механічного навантаження.
Система векторного керування асинхронним двигуном
Номер патенту: 79969
Опубліковано: 13.05.2013
Автори: Лиходій Ігор Олегович, Огарь Віта Олександрівна
МПК: H02P 21/00
Мітки: керування, двигуном, асинхронним, система, векторного
Формула / Реферат:
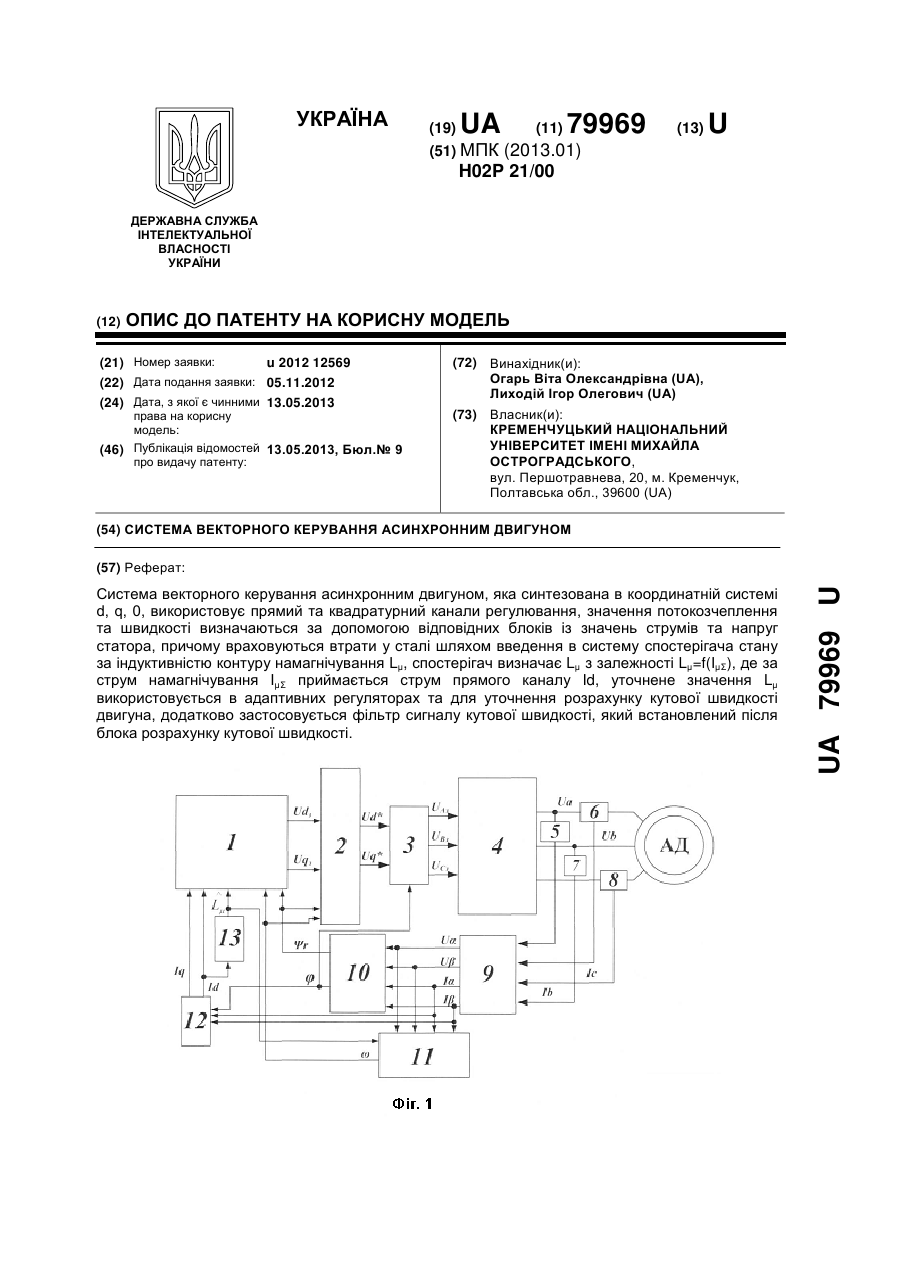
Система векторного керування асинхронним двигуном, яка синтезована в координатній системі d,q,0, використовує прямий та квадратурний канали регулювання, значення потокозчеплення та швидкості визначаються за допомогою відповідних блоків із значень струмів та напруг статора, яка відрізняється тим, що враховуються втрати у сталі шляхом введення в систему спостерігача стану за індуктивністю контуру намагнічування Lμ, спостерігач визначає...
Спосіб частотного керування асинхронним двигуном
Номер патенту: 2944
Опубліковано: 26.12.1994
Автор: Ярославцев Михайло Іванович
МПК: H02P 27/04
Мітки: асинхронним, керування, двигуном, спосіб, частотного
Формула / Реферат:
Способ частотного управления асинхронным двигателем, при котором регулируют частоту и величину напряжения питания асинхронного двигателя путем широтно-импульсного модулирования постоянного напряжения питания инвертора, обеспечивая закон регулирования U=Uo+Kf, отличающийся тем, что широтно-импульсное модулирование осуществляют путем дополнительного регулирования длительности импульсов в каждой полуволне напряжения питания по следующему...
Стенд лабораторний для вивчення основ частотного керування електроприводом з асинхронним двигуном
Номер патенту: 90592
Опубліковано: 10.06.2014
Автори: Мастепан Антон Геннадійович, Маслій Андрій Сергійович, Маслій Артем Сергійович, Лутай Сергій Миколайович
МПК: G09B 23/00, H02M 5/257
Мітки: лабораторний, електроприводом, двигуном, частотного, основ, асинхронним, стенд, керування, вивчення
Формула / Реферат:
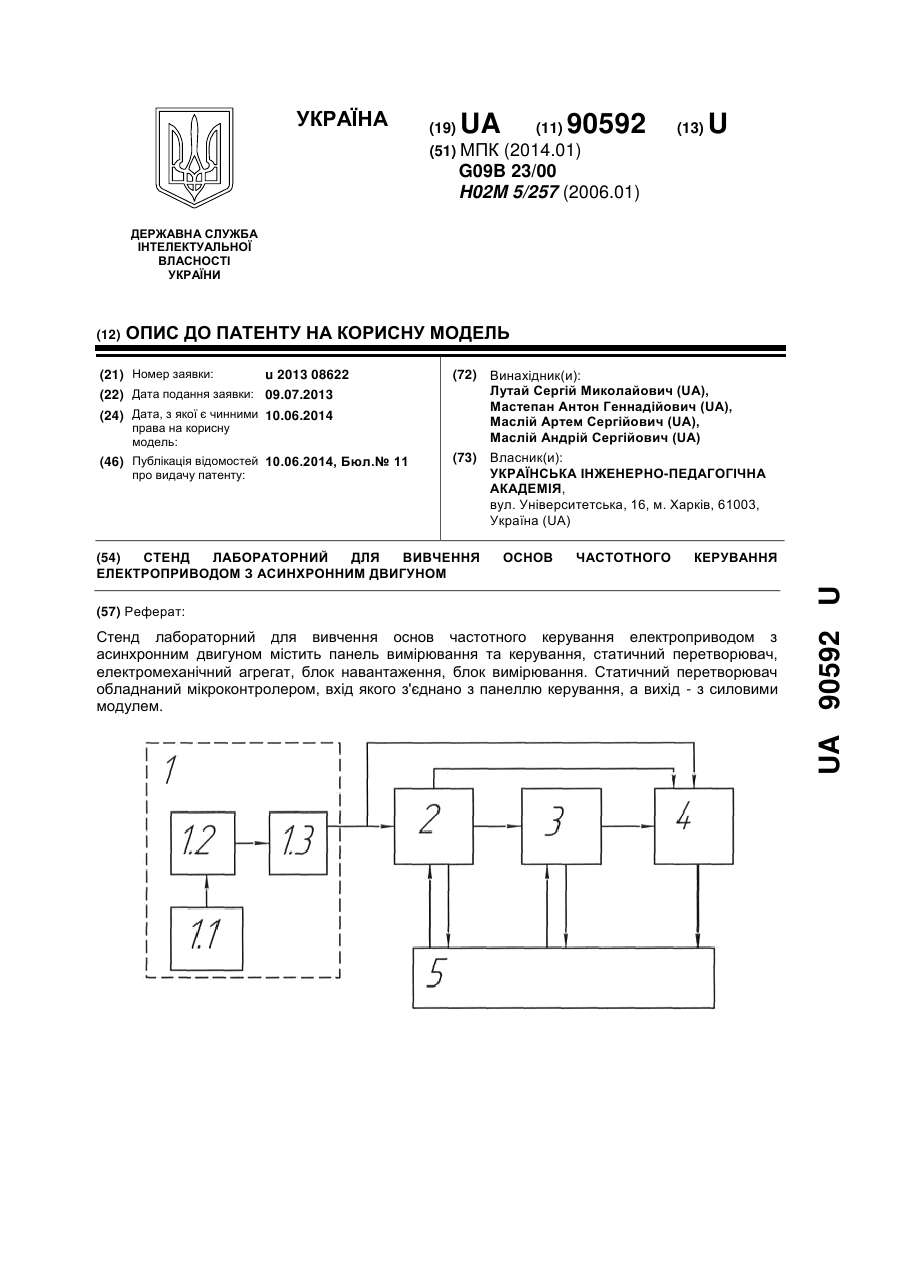
Стенд лабораторний для вивчення основ частотного керування електроприводом з асинхронним двигуном, що містить панель вимірювання та керування, статичний перетворювач, електромеханічний агрегат, блок навантаження, блок вимірювання, який відрізняється тим, що статичний перетворювач обладнаний мікроконтролером, вхід якого з'єднано з панеллю керування, а вихід - з силовими модулем.
Спосіб керування асинхронним двигуном та електропривід, що його реалізує
Номер патенту: 31656
Опубліковано: 15.12.2000
Автор: Михайлюта Сергій Леонтійович
МПК: H02P 27/04, H02P 7/00
Мітки: керування, електропривід, реалізує, спосіб, асинхронним, двигуном
Текст:
...для забезпечення мінімального стру , статора, реактивна складова струну статора нае підтримуватись пропорційн активній складовій. На фіг Л зображена крива зміни моменту асинхронного двигуна 4A100L4 одержана в результаті моделювання, при зміні співвідношення складових стрn чиї запропонований спосіб керування асинхронним двнгуном дозволяє забезпечнт високі динамічні властивості електроприводу та мінімальне споживання струм від...
Попередній патент: Спосіб діагностики витоків в трубопровідній мережі електрогідравлічного комплексу
Випадковий патент: Спосіб футерування сталерозливного ковша