Безплатформний навігаційний комплекс з інерціальною системою орієнтації на “грубих” чутливих елементах і спосіб корекції його інерціальних датчиків
Номер патенту: 103858
Опубліковано: 25.11.2013
Автори: Греков Олександр Миколайович, Алексеев Сергій Юрійович, Греков Миколай Олександрович

Формула / Реферат
1. Безплатформний навігаційний комплекс з інерціальною системою орієнтації на "грубих" чутливих елементах, яка підключена до обчислювальної платформи і містить розташовані за трьома ортогональними осями три акселерометри і три датчики кутових швидкостей, який відрізняється тим, що він додатково містить підключені до обчислювальної платформи трьохосьовий магнітний компас і гідростатичний блок нахилу, що містить три диференціальних датчики гідростатичного тиску, розташовані за трьома ортогональними осями на кінцях рівних за довжиною баз.
2. Спосіб корекції інерціальних датчиків безплатформного навігаційного комплексу з інерціальною системою орієнтації на "грубих" чутливих елементах, що полягає у тому, що за сигналами трьох акселерометрів і трьох датчиків кутових швидкостей, розташованих за трьома ортогональним осями, обчислюють кути орієнтації шляхом розрахунку матриці направляючих косинусів між зв'язаною і навігаційною системами координат, виконують компенсацію погрішностей сигналів прискорень акселерометрів, виконують перерахунок прискорень зі зв'язаної системи координат в навігаційну систему і визначають поточні швидкості і прирощення координат, який відрізняється тим, що додатково виконують вимірювання трьохосьовим магнітним компасом і трьома диференціальними датчиками тиску, розташованими за трьома ортогональним осями на кінцях рівних за довжиною баз, за показанням компаса і датчиків тиску обчислюють кути нахилу між зв'язаною і навігаційною системами координат, за показанням компаса обчислюють кут азимута, і з урахуванням отриманих значенькутів нахилу і азимута коректують показання акселерометрів і датчиків кутових швидкостей.
Текст
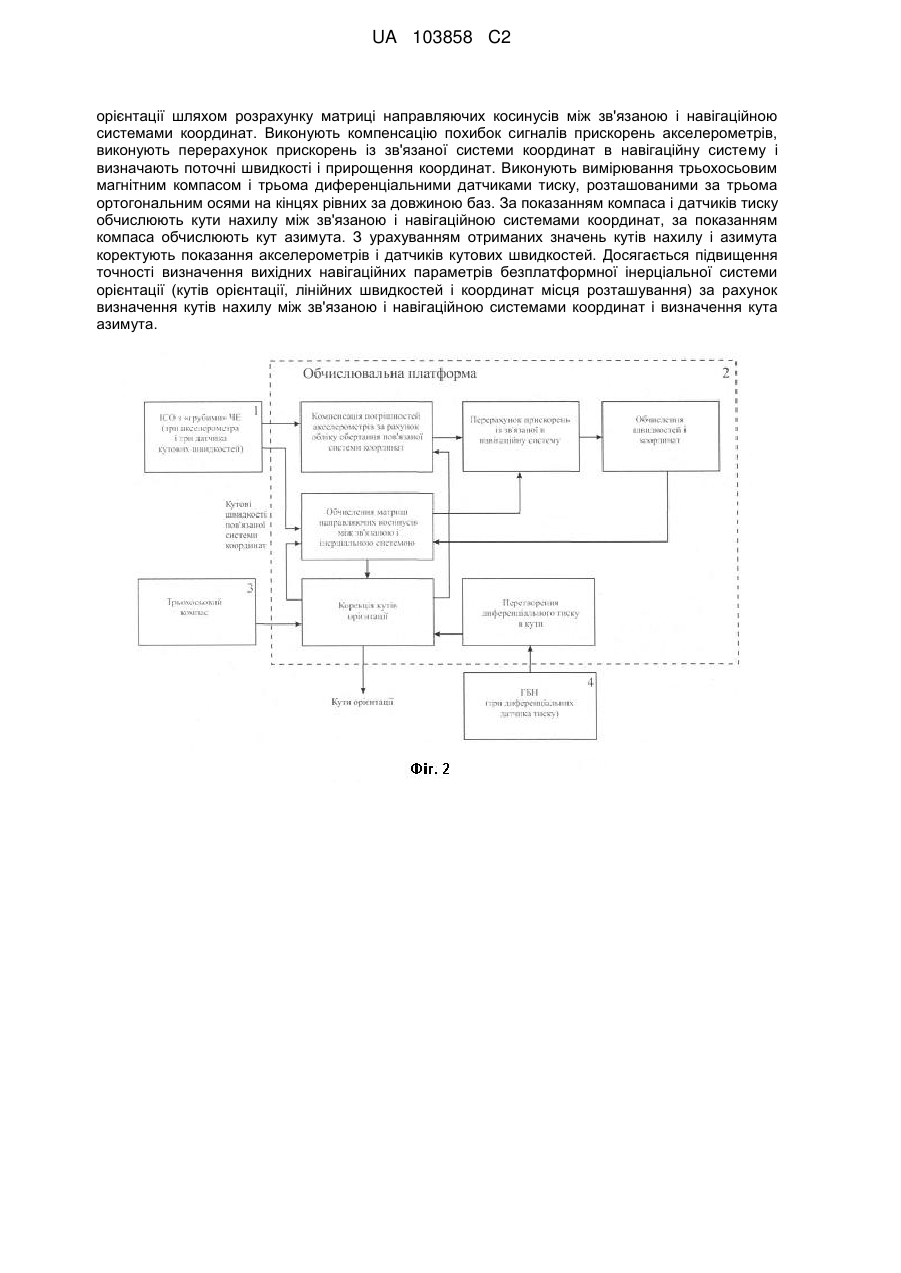
Реферат: Винаходи належить до області приладобудування, є засобами навігації, у яких система орієнтації інтегрована з гідростатичним блоком нахилу (ГБН) і трьохосьовим компасом, і можуть бути використані для морських об'єктів. Суть винаходу-пристрою: безплатформний навігаційний комплекс містить інерціальну систему орієнтації (ІСО) на "грубих" чутливих елементах, яка підключена до обчислювальної платформи і включає розташовані по трьох ортогональних осях ІСО три акселерометри і три датчики кутових швидкостей. Комплекс також містить підключені до обчислювальної платформі трьохосьовий магнітний компас і гідростатичний блок нахилу (ГБН), що містить три диференціальних датчики гідростатичного тиску, розташовані за трьома ортогональними осями ГБН на кінцях рівних за довжиною баз. Безплатформний навігаційний комплекс із інерціальною системою орієнтації на "грубих" чутливих елементах, яка підключена до обчислювальної платформи і містить розташовані за трьома ортогональними осями три акселерометри і три датчики кутових швидкостей, містить підключені до обчислювальної платформи трьохосьовий магнітний компас і гідростатичний блок нахилу. В способі корекції інерціальних датчиків безплатформного навігаційного комплексу з інерціальною системою орієнтації на "грубих" чутливих елементах за сигналами трьох акселерометрів і трьох датчиків кутових швидкостей, розташованих за трьома ортогональними осями ІСО, обчислюють кути UA 103858 C2 (12) UA 103858 C2 орієнтації шляхом розрахунку матриці направляючих косинусів між зв'язаною і навігаційною системами координат. Виконують компенсацію похибок сигналів прискорень акселерометрів, виконують перерахунок прискорень із зв'язаної системи координат в навігаційну систему і визначають поточні швидкості і прирощення координат. Виконують вимірювання трьохосьовим магнітним компасом і трьома диференціальними датчиками тиску, розташованими за трьома ортогональним осями на кінцях рівних за довжиною баз. За показанням компаса і датчиків тиску обчислюють кути нахилу між зв'язаною і навігаційною системами координат, за показанням компаса обчислюють кут азимута. З урахуванням отриманих значень кутів нахилу і азимута коректують показання акселерометрів і датчиків кутових швидкостей. Досягається підвищення точності визначення вихідних навігаційних параметрів безплатформної інерціальної системи орієнтації (кутів орієнтації, лінійних швидкостей і координат місця розташування) за рахунок визначення кутів нахилу між зв'язаною і навігаційною системами координат і визначення кута азимута. UA 103858 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винаходи належать до області приладобудування, є засобами навігації, у яких система орієнтації інтегрована з гідростатичним блоком нахилу (ГБН) і трьохосьовим компасом, і можуть бути використані для морських об'єктів. Використання малогабаритних безплатформних інерціальних систем орієнтації (ІСО) з "грубими" чутливими елементами (ЧЕ) типу MEMS (Microelectromechanical System мікроелектронних механічних систем) описано в цілому ряді патентів США корпорації American GNC, наприклад, у ряді патентів про мікро(малогабаритні)інерціальні вимірювальні пристрої (ІВП) (патенти US №№: 6 671 648; 6 52 2922; 6 516 283) та про способи обробки вимірювань параметрів руху з їх застосуванням (патенти US № №: 6 697 758; 6 651 027; 6 494 093; 6 473 713; 6 427 131). Відомі також навігаційні системи, описані в патентах Російської Федерації (патенти RU №№: 2345326; 2348903). Основну увагу в цих патентах приділено представленню переваг у порівнянні зі "звичайними" традиційними ІВП дешевого мікроблока ІВП на "грубих" ЧЕ в безплатформній інерціальній навігаційній системі (БІНС) з обчислювальною навігаційною платформою із застосуванням в ній контурів демпфування та інших зовнішніх коригувальних засобів. Спосіб визначення навігаційних параметрів за допомогою БІНС за патентом RU № 2348903 заснований на використанні сигналів блока акселерометрів і гіроскопічних датчиків кутових швидкостей і полягає в наступному. Проводять розрахунок матриці направляючих косинусів між зв'язаною і навігаційною системами координат, компенсують похибки акселерометрів за рахунок обліку обертання пов'язаної системи, здійснюють перерахунок показань акселерометрів із зв'язаної в навігаційну систему координат і їх інтегрування для розрахунку поточних швидкостей і прирощення координат. При цьому здійснюють різні режими руху носія, на якому встановлена БІНС. Цими режимами є сильний маневр, слабке маневрування і крейсерський рух без маневрування. При цьому вимірюють параметри руху носія. Цими параметрами є крен, похідна курсу та прискорення носія в площині горизонту. Далі ці параметри використовують для обчислення коефіцієнтів підсилення систем, що реалізують індивідуальні закони управління паралельно до обчислюваних матриць направляючих косинусів між зв'язаною і навігаційної системами координат по одних і тих же показаннях акселерометрів і датчиків кутових швидкостей. Для кожної обчислювальної матриці направляючих косинусів визначають власні навігаційні параметри, що мають різний частотний характер помилок. І помилки обчислення кожної з матриць також мають різний частотний спектр залежно від режимів руху носія. Навігаційні параметри для кожної обчислювальної матриці направляючих косинусів подають на входи майстер-фільтра, що формує оптимальну комбінацію навігаційних рішень в залежності від частотного діапазону їх помилок, а також від параметрів руху носія. Недоліком цього аналога є необхідність враховувати різні режими руху носія, на якому встановлена БІНС, що для морських об'єктів в більшості випадків неприйнятно. Найбільш близьким за сукупністю ознак аналогом заявлених технічних рішень може вважатися спосіб визначення навігаційних параметрів за патентом США № 5 422 817, тому він вибраний як прототип для кожного з винаходів, які входять до заявленої групи. Подібними з ознаками прототипу є наступні ознаки заявленого безплатформного навігаційного комплексу: інерціальна система орієнтації (ІСО) на "грубих" чутливих елементах, яка підключена до обчислювальної платформі і включає розташовані по трьох ортогональних осях ІСО три акселерометри і три датчики кутових швидкостей. Подібними з ознаками прототипу є такі ознаки заявленого способу корекції інерціальних датчиків безплатформного навігаційного комплексу з ICO на "грубих" ЧЕ: за сигналами трьох акселерометрів і трьох датчиків кутових швидкостей, розташованих за трьома ортогональним осями ІСО, обчислюють кути орієнтації шляхом розрахунку матриці направляючих косинусів між пов'язаною і навігаційною системами координат, виконують компенсацію похибок сигналів прискорень акселерометрів, виконують перерахунок прискорень із зв'язаної системи координат в навігаційну систему і визначають поточні швидкості і прирощення координат. У прототипі є традиційний недолік будь-яких інерціальних систем навігації, що полягає в тому, що помилки у визначенні орієнтації однозначно визначаються точністю датчиків кутових швидкостей (ДКШ) і акселерометрів, тоді як помилки у визначенні координат зростають з плином часу пропорційно швидкості дрейфу ДКШ. Цей недолік, особливо для відносно "грубих" -3g чутливих елементів (ДЕШ і акселерометрів відповідно на рівні 0,1 град./с і 10 ), призводить до того, що через деякий час автономної роботи (це залежить від точності чутливих елементів) обчислена на борту носія навігаційна система буде відрізнятися від істинної навігаційної системи на великі кути, що фактично веде до непрацездатності способу навігації. Обмеженість цього традиційного методу полягає в тому, що помилки інерціальної системи невіддільні від корисного сигналу (тобто істинних навігаційних параметрів). Цей висновок ґрунтується на тому 1 UA 103858 C2 5 10 15 20 25 30 35 40 45 50 55 факті, що помилки інерціальної системи мають низькочастотний характер, так звані шулеровські коливання, які невіддільні від реальних рухів носія, на якому встановлена система. Треба зауважити, що традиційний метод числення навігаційних параметрів не залежить від параметрів руху об'єкта, тобто точність системи (у першому наближенні) не залежить від того, з якими параметрами рухається носій, тобто, чи здійснює маневр або рухається з постійною швидкістю (крейсерський режим). Помилки традиційного методу залежать виключно від точності чутливих елементів і ніяким чином не коригуються внутрішніми зв'язками. В основу винаходу поставлена задача створення двох пов'язаних єдиним винахідницьким задумом технічних рішень, а саме безплатформного навігаційного комплексу з інерціальною системою орієнтації на "грубих" чутливих елементах і способу корекції інерціальних датчиків цього навігаційного комплексу, сукупністю суттєвих ознак кожного з яких забезпечується досягнення єдиної нової технічної властивості - усунення похибок визначення параметрів інерційної системи навігації за рахунок можливості визначення кутів нахилу між зв'язаною і навігаційної системами координат і визначення кута азимута. Зазначена нова властивість забезпечує досягнення єдиного технічного результату заявленої групи винаходів - підвищення точності визначення вихідних навігаційних параметрів безплатформної інерціальної системи орієнтації - кутів орієнтації, лінійних швидкостей і координат місцеположення. Задача винаходу вирішується тим, що в безплатформному навігаційному комплексі, який містить інерціальну систему орієнтації (ІСО) на "грубих" чутливих елементах, яка підключена до обчислювальної платформи і включає розташовані по трьох ортогональних осях ІСО три акселерометри і три датчики кутових швидкостей, новим є те, що комплекс додатково містить підключені до обчислювальної платформі трьохосьовий магнітний компас і гідростатичний блок нахилу (ГБН), що містить три диференціальних датчики гідростатичного тиску, розташованих за трьома ортогональним осями ГБН на кінцях рівних за довжиною баз. Задачею винаходу вирішується також тим, що в способі корекції інерціальних датчиків безплатформного навігаційного комплексу з ІСО на "грубих" чутливих елементах, що полягає в тому, що за сигналами трьох акселерометрів і трьох датчиків кутових швидкостей, розташованих за трьома ортогональним осями ІСО, обчислюють кути орієнтації шляхом розрахунку матриці направляючих косинусів між зв'язаною і навігаційною системами координат, виконують компенсацію похибок сигналів прискорень акселерометрів, виконують перерахунок прискорень із зв'язаної системи координат в навігаційну систему і визначають поточні швидкості і прирощення координат, новим є те, що додатково виконують вимірювання трьохосьовим магнітним компасом і трьома диференціальними датчиками тиску, розташованими по трьом ортогональним осям на кінцях рівних за довжиною баз, за показаннями компаса і датчиків тиску обчислюють кути нахилу між зв'язаною і навігаційною системами координат, за показанням компаса обчислюють кут азимута, і з урахуванням отриманих значень кутів нахилу і азимута коректують показання акселерометрів і датчиків кутових швидкостей. Суть винаходу пояснюється за допомогою ілюстрацій, на яких в узагальненому вигляді зображено: фіг. 1 - блок-схема традиційного алгоритму обчислення параметрів безплатформного навігаційного комплексу з ІСО на "грубих" чутливих елементах; фіг. 2 - блоксхема алгоритму обчислення навігаційних параметрів згідно з заявленим винаходом. Традиційно побудований навігаційний комплекс (фіг. 1) містить інерціальну систему орієнтації ІСО 1 на "грубих" чутливих елементах, підключену до обчислювальної платформі 2. ІСО 1 містить розташовані за трьома її ортогональним осями три акселерометри і три датчики кутових швидкостей. Виходом цього навігаційного комплексу, тобто виходом обчислювальної платформи 2, є кути орієнтації. Обчислювальна платформа 2 в процесі визначення скоригованих навігаційних параметрів здійснює такі функції: - компенсація похибок акселерометрів за рахунок обліку обертання пов'язаної системи координат; - обчислення матриці направляючих косинусів між зв'язаною і інерціальною системами; - перерахунок прискорень із зв'язаної в навігаційну систему; - обчислення швидкостей і координат. Заявлений безплатформний навігаційний комплекс (фіг. 2), так само, як і прототип, містить інерціальну систему орієнтації ІСО 1 на "грубих" чутливих елементах, яка підключена до обчислювальної платформі 2 і містить розташовані за трьома ортогональним осями ІСО три акселерометри і три датчики кутових швидкостей. При цьому виходом комплексу, як і в прототипі, є кути орієнтації. 2 UA 103858 C2 5 10 15 20 25 30 35 40 В алгоритмі роботи обчислювальної платформи 2 також є функції, властиві роботі обчислювальної платформи в прототипі: компенсація похибок акселерометрів за рахунок обліку обертання пов'язаної системи координат; обчислення матриці направляючих косинусів між зв'язаною і інерціальною системами; перерахунок прискорень із зв'язаної в навігаційну систему; обчислення швидкостей і координат. Згідно з винаходом, для компенсації похибок вимірювань (корекції інерційних датчиків), навігаційний комплекс додатково містить трьохосьовий магнітний компас 3, підключений до обчислювальної платформи 2, і гідростатичний блок нахилу ГБН 4, який також підключений до обчислювальної платформи 2 і містить чутливі елементи - три диференціальних датчики гідростатичного тиску, розташовані за трьома ортогональним осями ГБН на кінцях рівних за довжиною баз. При цьому обчислювальна платформа 2 здійснює додаткові, у порівнянні з прототипом, функції: - корекція кутів орієнтації; - перетворення диференціального тиску в кути. Робота заявленого пристрою і його переваги пояснюються шляхом зіставлення з роботою прототипу. У прототипі після отримання обчислювальною платформою 2 сигналів від акселерометрів системи ІСО 1 проводиться компенсація помилок акселерометрів, викликаних обертанням пов'язаної системи координат. Далі відбувається перерахунок прискорень зі зв'язаної в навігаційну систему. Матрицю напрямних косинусів між зв'язаною і навігаційною системами координат розраховують (зазвичай через кватерніонні перетворення) за кутовими швидкостями пов'язаної і навігаційної систем координат. При цьому сигнали кутових швидкостей пов'язаної системи координат надходять безпосередньо з системи 1 "грубих" чутливих елементів датчиків, а кутові швидкості навігаційної системи координат розраховують шляхом інтегрування прискорень навігаційної системи. Друге інтегрування зазначених прискорень забезпечує визначення прирощення координат. З роботи прототипу очевидно, що точність системи безпосередньо залежить від похибок "грубих" чутливих елементів. Заявлений навігаційний комплекс відрізняється від прототипу тим, що для усунення фактора впливу цих похибок у нього додатково введені трьохосьовий магнітний компас 3 і гідростатичний блок нахилу ГБН 4. Заявлений спосіб корекції інерціальних датчиків системи ІСО навігаційного комплексу здійснюється наступним чином. У обчислювальну платформу 2 з певним інтервалом часу надходить інформація з трьохосьового компаса 3. Величина цього інтервалу визначається з розрахунку дрейфу нуля гіроскопа (датчика кутових швидкостей) і в середньому становить кілька хвилин. З гідростатичного блока нахилу 4 в обчислювальну платформу 2 також надходить інформація. Платформа 2 здійснює перетворення диференціального тиску в кути, на основі чого проводить корекцію кутів орієнтації. Алгоритм розрахунку полягає в обчисленні кутів нахилу вимірювача , , щодо осей z , x , y . Вісь z розташована строго вертикально. Інформація про диференціальний тиск Px , Py , Pz надходить з блока 4 чутливих елементів - трьох диференціальних датчиків тиску. Шуканий диференціальний тиск по вертикалі P обчислюється за формулою 2 2 2 P Px Py Pz . (1) 45 50 Знаючи P і його складові по всіх осях, завжди можна обчислити кут нахилу вимірювача відносно вертикалі P arccos z . (2) P Аналогічно можна обчислити кути нахилу і по осях х і у, які однозначно задають положення площини А1-А2, В1-В2 до горизонтальної площини. Кут по осі х, і кут по осі у обчислюються за формулами P arcsin x , (3) P Py . (4) arcsin P 3 UA 103858 C2 5 10 15 20 25 30 35 40 45 50 55 Обчислювальна платформа 2 через певний час після корекції кутів орієнтації (інтервал часу визначається дрейфом гіроскопів) здійснює обчислення матриці направляючих косинусів між зв'язаною і інерціальною системами і проводить компенсацію похибок акселерометрів за рахунок обліку обертання пов'язаної системи координат. Отримані скориговані значення беруть участь в обчисленні швидкостей і координат. Таким чином, за показаннями трьохосьового магнітного компаса і трьох диференціальних датчиків тиску, розташованих за трьома ортогональним осями на кінцях рівних за довжиною баз, обчислюють кути нахилу між зв'язаною і навігаційною системами координат і кут азимута. Отримані значення використовують для коригування показань інерціальних датчиків акселерометрів і гіроскопів ІСО. При такому алгоритмі коректування в обчислювальній платформі 2 фактично відбувається корекція дрейфу гіроскопів, які працюють стабільно в невеликий проміжок часу. У той же час гідростатичний блок нахилу погано працює у верхньому шарі океану, де спостерігається поверхневе хвилювання, і в цьому випадку використовують показання гіроскопів. Час осереднення компаса може досягати кілька секунд. Іноді осереднення необхідно збільшувати до кількох хвилин, наприклад, при наближенні грозового фронту. Довжину вимірювальної бази ГБН навігаційної системи вибирають в залежності від того, на який прилад буде встановлюватися навігаційний комплекс і з якою точністю необхідно визначати навігаційний параметри. При випробуваннях, проведених заявником, Морським гідрофізичним інститутом НАН України, в навігаційному комплексі в ГБН були встановлені три диференціальних датчики тиску фірми Freescale Semiconductor. Сумарна похибка датчиків MPXV7002DP становить 2,5 %, в яку входить і похибка від тимчасової нестабільності. Діапазон вимірювання диференціального тиску ± 2кПа. Розрахункова довжина бази не повинна перевищувати: P , (5) L g де P - величина діапазону диференціального тиску, кПа; - щільність води; g - величина прискорення вільного падіння. У нашому випадку довжина бази не повинна перевищувати 40 см, що задовольняє умові формули 5. З урахуванням того, що на практиці кут нахилу гідрологічних приладів (зондувальних, автоматичних буйкових станцій) не перевищує ~40°, по формулах 2, 3 і 4 розраховують похибку отриманих кутів. У середньому вони становлять ~3° і залежать від точності диференціальних датчиків тиску, їх діапазону вимірювання та довжини вимірювальної бази ГБН. В результаті випробувань було встановлено, що похибка визначення кутів ГБН не перевищила ~3° за 8 годин роботи, а відхід від нуля гіроскопів по куту склав ~70° за цей же час. Отже використання даного винаходу підвищить точність визначення навігаційних параметрів для кутів у 23 рази. ФОРМУЛА ВИНАХОДУ 1. Безплатформний навігаційний комплекс з інерціальною системою орієнтації на "грубих" чутливих елементах, яка підключена до обчислювальної платформи і містить розташовані за трьома ортогональними осями три акселерометри і три датчики кутових швидкостей, який відрізняється тим, що він додатково містить підключені до обчислювальної платформи трьохосьовий магнітний компас і гідростатичний блок нахилу, що містить три диференціальних датчики гідростатичного тиску, розташовані за трьома ортогональними осями на кінцях рівних за довжиною баз. 2. Спосіб корекції інерціальних датчиків безплатформного навігаційного комплексу з інерціальною системою орієнтації на "грубих" чутливих елементах, що полягає у тому, що за сигналами трьох акселерометрів і трьох датчиків кутових швидкостей, розташованих за трьома ортогональним осями, обчислюють кути орієнтації шляхом розрахунку матриці направляючих косинусів між зв'язаною і навігаційною системами координат, виконують компенсацію погрішностей сигналів прискорень акселерометрів, виконують перерахунок прискорень зі зв'язаної системи координат в навігаційну систему і визначають поточні швидкості і прирощення координат, який відрізняється тим, що додатково виконують вимірювання трьохосьовим магнітним компасом і трьома диференціальними датчиками тиску, розташованими за трьома ортогональним осями на кінцях рівних за довжиною баз, за показанням компаса і датчиків тиску 4 UA 103858 C2 обчислюють кути нахилу між зв'язаною і навігаційною системами координат, за показанням компаса обчислюють кут азимута, і з урахуванням отриманих значень кутів нахилу і азимута коректують показання акселерометрів і датчиків кутових швидкостей. Комп’ютерна верстка А. Крулевський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюHrekov Oleksandr Mykolaiovych, Hrekov Mykola Oleksandrovych
Автори російськоюГреков Александр Николаевич, Греков Николай Александрович
МПК / Мітки
МПК: G01C 23/00
Мітки: системою, орієнтації, елементах, грубих, комплекс, спосіб, безплатформний, чутливих, датчиків, корекції, інерціальною, навігаційний, інерціальних
Код посилання
<a href="https://ua.patents.su/7-103858-bezplatformnijj-navigacijjnijj-kompleks-z-inercialnoyu-sistemoyu-oriehntaci-na-grubikh-chutlivikh-elementakh-i-sposib-korekci-jjogo-inercialnikh-datchikiv.html" target="_blank" rel="follow" title="База патентів України">Безплатформний навігаційний комплекс з інерціальною системою орієнтації на “грубих” чутливих елементах і спосіб корекції його інерціальних датчиків</a>
Безплатформний інерціальний блок

Номер патенту: 35089
Опубліковано: 26.08.2008
Автори: Субота Анатолій Максимович, Апоян Армен Генрікович, Кулік Анатолій Степанович, Фірсов Сергій Миколайович, Златкін Олег Юрьєвич
МПК: G01C 21/00
Мітки: інерціальній, блок, безплатформний
Формула / Реферат:
Безплатформний інерціальний вимірювальний блок, що містить основу, на котрій розміщені гіроскопи, акселерометри, джерела струму, сервісні електронні блоки, який відрізняється тим, що відносно кожної ортогональної осі установлено по мікромеханічному акселерометру, осі чутливості яких співпадають з названими осями, і три мікромеханічні двовісні датчики кутової швидкості, осі чутливості першого з них паралельні осям Х і Y, другого - осям Y і Z,...
Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс

Номер патенту: 63186
Опубліковано: 26.09.2011
Автори: Дергачов Костянтин Юрьєвич, Степанов Федір Володимирович, Кулік Анатолій Степанович
МПК: G01C 23/00
Мітки: комплекс, автоматизований, інерціально-супутниковий, відмовостійкий, навігаційний
Формула / Реферат:
Відмовостійкий інерціально-супутниковий автоматизований навігаційний комплекс, що містить багатоканальний радіоприймач, вхід якого через підсилювач пов'язаний з антеною, а його виходи підключені до першої групи входів обчислювача місця розташування супутників, блок початкової установки альманаху даних про супутники, підключений виходами до другої групи входів обчислювача місця розташування супутників, таймер, підключений виходом до...
Спосіб прицілювання нашоломною системою цілевказівки і пристрій для його реалізації
Номер патенту: 74236
Опубліковано: 15.11.2005
Автори: Король Іван Іванович, Утіркін Микола Володимирович, Черняк Сергій Іванович, Кадочніков Сергій Михайлович
МПК: F41G 3/22
Мітки: прицілювання, реалізації, пристрій, системою, спосіб, нашоломною, цілевказівки
Формула / Реферат:
1. Спосіб прицілювання нашоломною системою цілевказівки, в основу якого покладено сканування простору знаходження нашоломного вузла з n випромінюючими діодами плоскими оптичними віяловими променями, визначення первинних пеленгів на кожний з n випромінюючих діодів і положення n випромінюючих діодів в просторовій площині, яка проходить через реперні точки нашоломного вузла, в яких розміщені випромінюючі діоди, який відрізняється тим, що у...
Сорбційноактивний матеріал покриття для п’єзоелектричних мас-чутливих датчиків на амоніак
Номер патенту: 62182
Опубліковано: 15.12.2003
Автори: Гребенніков Володимир Миколайович, Демешко Сергій Вікторович, Філіппов Олексій Павлинович, Бурлаєнко Наталія Андріївна, Манорик Петро Андрійович, ФЕДОРЕНКО МАЙЯ АЛЬБЕРТІВНА, ШУЛЬЖЕНКО ОЛЕКСАНДР ВАСИЛЬОВИЧ, Погоріла Лідія Михайлівна
МПК: G01N 31/22, G01N 29/00, G01N 27/00
Мітки: п'єзоелектричних, сорбційноактивний, мас-чутливих, датчиків, покриття, матеріал, амоніак
Формула / Реферат:
Сорбційно активний матеріал покриття для п'єзоелектричних мас-чутливих датчиків на амоніак на основі координаційної сполуки 3d-перехідного металу як чутливої речовини, який відрізняється тим, що він містить як основу натрієву сіль різнолігандної гетероядерної координаційної сполуки міді і цинку з етилендіамінтетраоцтовою кислотою та з лимонною кислотою загальної емпіричної формули Na4(H6Cu Zn (Edta)2 (Citr)2].7Н2О, де Edta - аніон...
Відмовостійкий блок датчиків кутових швидкостей
Номер патенту: 36480
Опубліковано: 27.10.2008
Автори: Бандура Іван Миколайович, Фірсов Сергій Миколайович, Кулік Анатолій Степанович, Златкін Олег Юрійович, Пилев Михайло Юрійович
МПК: G01C 21/00
Мітки: швидкостей, кутових, відмовостійкий, блок, датчиків
Формула / Реферат:
Відмовостійкий блок датчиків кутових швидкостей, що складається з датчиків кутових швидкостей, чутливі осі яких розташовані в ортогональній системі координат, і обчислювальної машини, який відрізняється тим, що додатково введений четвертий датчик кутової швидкості, розташований по діагоналі куба на відстані , де R - відстань від центру системи до інших датчиків, виходи...
Попередній патент: Спосіб подання вугілля по ходу конвертерної плавки
Наступний патент: Сигаретний фільтр і сигарета
Випадковий патент: Спосіб очищення стиролу