Автоматизована система керування вогнем бойової машини
Номер патенту: 105589
Опубліковано: 26.05.2014
Автори: Гринькович Орест Степанович, ОЛІЯРНИК БОГДАН ОЛЕКСІЙОВИЧ, Лапицький Сергій Володимирович, Оліярник Олексій Богданович
Формула / Реферат
Автоматизована система керування вогнем бойової машини, що містить пульт командира, який входами-виходами з'єднаний з виходами-входами пульта оператора, інші входи-виходи якого з'єднані з цифровим каналом зв'язку, пульт керування командира, вхід якого з'єднаний з виходом відеооглядового пристрою командира, а перший та другий виходи відповідно з'єднані з першим входом відеооглядового пристрою командира та першим входом блока управління, приціл навідника, перший вхід якого з'єднаний з цифровим каналом зв'язку, а другий - з першим виходом блока управління, другий вихід якого з'єднаний з другим входом відеооглядового пристрою командира, а третій вихід блока управління з'єднаний з входом автомата супроводження об'єктів теплотелевізійного, вихід якого з'єднаний з другим входом блока управління, а вхід-вихід - з цифровим каналом зв'язку, балістичний обчислювач, входи-виходи якого з'єднані з виходами-входами датчиків системи керування вогнем, які з'єднані з цифровим каналом зв'язку, інші входи-виходи балістичного обчислювача з'єднані з цифровим каналом зв'язку, а вихід - з першим входом стабілізатора озброєння, другий та третій входи якого відповідно з'єднані з виходом прицілу навідника та виходом пульта оператора, а перший вихід стабілізатора озброєння з'єднаний з третім входом блока управління, другий та третій виходи стабілізатора озброєння є виходами відповідно каналу вертикального наведення КВН гармати та каналу горизонтального наведення ΚГΉ гармати, а вхід-вихід стабілізатора озброєння та вхід-вихід блока управління з'єднані з цифровим каналом зв'язку, систему вимірювання координат, вихід якої з'єднаний з четвертим входом блока управління, яка відрізняється тим, що в неї додатково введені трикоординатний датчик лінійних прискорень та блок розрахунку змін орієнтації корпусу, при цьому трикоординатний датчик лінійних прискорень встановлений на корпусі бойової машини та з'єднаний з входом блока розрахунку змін орієнтації корпусу, вихід якого з'єднаний з п'ятим входом блока управління, а вхід-вихід з'єднаний з цифровим каналом зв'язку.
Текст
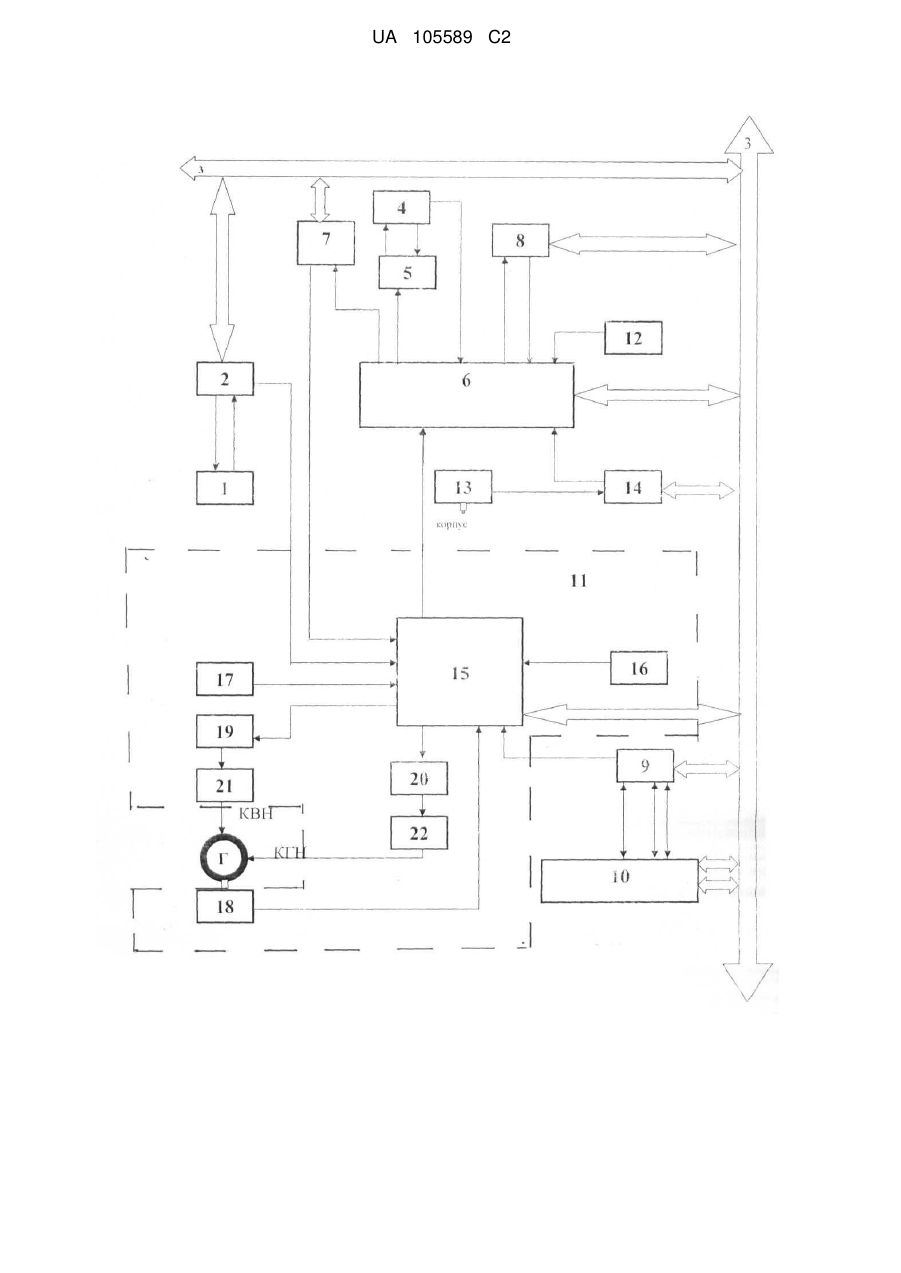
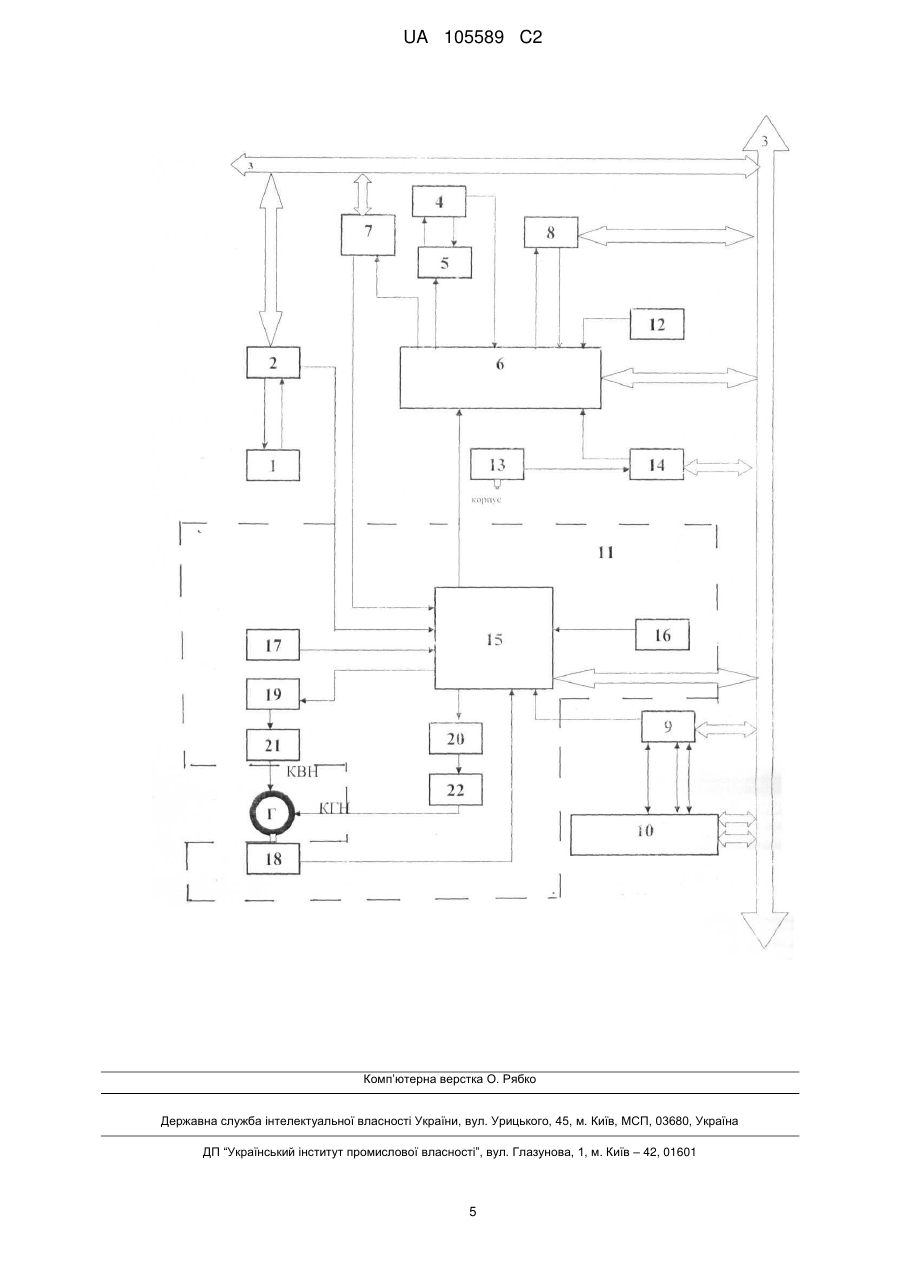
Реферат: Винахід належить до області військової бронетанкової техніки. Автоматизована система керування вогнем бойової машини містить пульт командира, пульт оператора, цифровий канал зв'язку, пульт керування командира, відеооглядовий пристрій командира, блок управління, приціл навідника, автомат супроводження об'єктів теплотелевізійний, балістичний обчислювач, датчики системи керування вогнем, стабілізатор озброєння та систему вимірювання координат. При цьому балістичний обчислювач з'єднаний із стабілізатором озброєння, який з'єднаний також з прицілом навідника, пультом оператора, блоком управління та з цифровим каналом зв'язку. А другий та третій виходи стабілізатора озброєння є виходами відповідно каналу вертикального наведення КВН гармати та каналу горизонтального наведення КГН гармати. Згідно з винаходом, в систему додатково введені трикоординатний датчик лінійних прискорень та блок розрахунку змін орієнтації корпусу, при цьому трикоординатний датчик лінійних прискорень встановлений на корпусі бойової машини та з'єднаний з входом блока розрахунку змін орієнтації корпусу, вихід якого з'єднаний з п'ятим входом блока управління, а вхід-вихід з'єднаний з цифровим каналом зв'язку. Таке конструктивне виконання системи разом з відповідними взаємозв'язками між зазначеними її блоками дозволить значно підвищити ефективність ведення вогню при одночасній високій точності стрільби. UA 105589 C2 (12) UA 105589 C2 UA 105589 C2 5 10 15 20 25 30 35 40 45 50 55 60 Винахід належить до області військової бронетанкової техніки, а саме до комплексів озброєння бойових машин типу БМП, танків, БТР, самохідних артилерійських або ракетних установок, та може бути використаний як при розробці нових, так і при модернізації раніше випущених бойових машин. Відомий пристрій для керування вогнем рухомого носія озброєння, зокрема танка (1), який містить сенсорний блок з двома двовісними динамічно налаштованими нерідинними гіроскопами та трьома одновісними акселерометрами, призначений для вимірювання координат цілі при русі танка, з яким з'єднані два обчислювачі, які служать для визначення позиції носія зброї та балістичних даних, а також для підготовки та розрахунку на основі результатів вимірювань керуючих величин, необхідних для первинної стабілізації прицілу і пристрою спостереження та вторинної стабілізації зброї. Використання повторної стабілізації за рахунок використання трьох одновісних акселерометрів та двох обчислювачів ускладнює систему та значно збільшує її собівартість при незабезпеченні необхідної точності ураження цілей. Крім того, коректування стрільби по невидимій цілі, після першого та наступного пострілів, та ввід поправок, здійснюється вручну, що збільшує час на приготування та здійснення наступного пострілу, а це знижує ефективність ведення вогню в порівнянні з технічними можливостями складної системи озброєння та збільшує імовірність ураження противником. Найбільш близькою за технічним задумом та суттєвими ознаками до запропонованої автоматизованої системи керування вогнем бойової машини є система керування вогнем бойової машини з закритих позицій (2), яка містить послідовно з'єднані балістичний обчислювач (БО) з системою датчиків вхідної інформації, стабілізатор озброєння (СО), блок керування (БУ), оптикотелевізійний приціл навідника (ОТПН), телетепловізійний автомат супроводження цілей (ТТАСЦ), пульт командира (ПК), пульт оператора (ПО), систему вимірювання координат (СВК), місце командира (МК), яке складається з послідовно з'єднаних пульта керування (ПУ) та відеооглядового пристрою командира (ВОПК), при цьому перші входи і перші виходи ОТПН, ТТАСЦ, БУ, СО, БО, ПК і ПО з'єднані з цифровим каналом зв'язку, а четвертий вхід та четвертий вихід БУ з'єднані відповідно з другим виходом та другим входом ТТАСЦ, а другий вихід ОТПН з'єднаний з четвертим входом СО, третій вхід якого з'єднаний з третім виходом ПО, а п'ятий вхід БУ з'єднаний з виходами СВК, третій вихід БУ з'єднаний з першим входом ВОПК, вихід якого з'єднаний з ПУ, другий вихід якого з'єднаний з третім входом БУ. Стабілізатор озброєння даної системи містить блок керування стабілізатора, перший вхід якого є першим входом стабілізатора озброєння, другий та третій входи якого є відповідно другим та третім входами стабілізатора озброєння, четвертий вхід якого з'єднаний з виходом пульта керування командира, а п'ятий та шостий входи відповідно з'єднані з виходом пульта керування навідника та датчиком положення гармати, а перший вихід блока керування стабілізатора є першим виходом стабілізатора озброєння, а другий та третій виходи блока керування стабілізатора відповідно з'єднані з входом підсилювача вертикального наведення та входом підсилювача горизонтального наведення, виходи яких відповідно з'єднані з входом двигуна вертикального наведення та виходом двигуна горизонтального наведення, виходи яких відповідно є каналами вертикального наведення ВН та горизонтального наведення ГН гармати, а вхід-вихід блока керування стабілізатора є цифровим входом-виходом стабілізатора озброєння. Основним недоліком даної системи є необхідність проведення поправок на доприцілення для здійснення другого пострілу, викликаних зміною орієнтації корпусу танку, самохідної артилерійської або ракетної установки, як в горизонтальній, так і у вертикальних площинах після здійснення першого пострілу, які проводяться в ручному режимі, що веде до значних витрат часу на підготовку другого та наступних пострілів. Але швидкоплинність та динамічність сучасного бою, викликаного високотехнічним розвитком засобів розвідки, яка дозволяє по траєкторії руху снаряду швидко визначати місце положення пускових установок, в тому числі шляхом використання космічного обладнання та засобів автоматичної передачі виявлених даних, не допускає значного витрачання часу на доприцілювання та ручного внесення поправок в систему, бо це надає можливості противнику збільшити час на прицілювання та здійснення миттєвого залпового вогню по місцю здійснення пострілу, тобто значно збільшується імовірність ураження пускових установок противником, а також знижує ефективність ведення бою по причині здійснення меншої кількості пострілів за заданий проміжок часу. В основу винаходу поставлено задачу удосконалити автоматизовану систему керування вогнем бойової машини шляхом додаткового введення в неї трикоординатного датчика лінійних прискорень та блока розрахунку змін орієнтації корпусу та відповідних зв'язків між ними та 1 UA 105589 C2 5 10 15 20 25 30 35 40 45 50 55 60 іншими блоками системи, що дозволило б автоматизувати процес коректування стрільби по невидимій цілі, після першого та наступного пострілів, та автоматизувати ввід поправок в систему, що дозволило б в 5-8 разів зменшити час на приготування до наступних пострілів, збільшити кількість пострілів за відповідний проміжок часу, а це забезпечило б високу ефективність ведення вогню при одночасному забезпеченні високої точності стрільби та усуненні імовірності ураження противником. Поставлена задача вирішується тим, що в автоматизовану систему керування вогнем бойової машини, що містить пульт командира, який входами-виходами з'єднаний з виходамивходами пульта оператора, інші входи-виходи якого з'єднані з цифровим каналом зв'язку, пульт керування командира, вхід якого з'єднаний з виходом відеооглядового пристрою командира, а перший та другий виходи відповідно з'єднані з першим входом відеооглядового пристрою командира та першим входом блока управління, приціл навідника, перший вхід якого з'єднаний з цифровим каналом зв'язку, а другий - з першим виходом блока управління, другий вихід якого з'єднаний з другим входом відеооглядового пристрою командира, а третій вихід блока управління з'єднаний з входом автомата супроводження об'єктів теплотелевізійного, вихід якого з'єднаний з другим входом блока управління, а вхід-вихід - з цифровим каналом зв'язку, балістичний обчислювач, входи-виходи якого з'єднані з виходами-входами датчиків системи керування вогнем, які з'єднані з цифровим каналом зв'язку, інші входи-виходи балістичного обчислювача з'єднані з цифровим каналом зв'язку, а вихід - з першим входом стабілізатора озброєння, другий та третій входи якого відповідно з'єднані з виходом прицілу навідника та виходом пульта оператора, а перший вихід стабілізатора озброєння з'єднаний з третім входом блока управління, другий та третій виходи стабілізатора озброєння є виходами відповідно каналу вертикального наведення КВН гармати та каналу горизонтального наведення ΚГΉ гармати, а вхід-вихід стабілізатора озброєння та вхід-вихід блока управління з'єднані з цифровим каналом зв'язку, систему вимірювання координат, вихід якої з'єднаний з четвертим входом блока управління, згідно з винаходом, в неї додатково введені трикоординатний датчик лінійних прискорень та блок розрахунку змін орієнтації корпусу, при цьому трикоординатний датчик лінійних прискорень встановлений на корпусі бойової машини та з'єднаний з входом блока розрахунку змін орієнтації корпусу, вихід якого з'єднаний з п'ятим входом блока управління, а вхід-вихід з'єднаний з цифровим каналом зв'язку. Введення нових блоків, а саме трикоординатного датчика лінійних прискорень та блока розрахунку змін орієнтації корпусу, зв'язків між ними та взаємозв'язку їх з відомими блоками системи, дозволяє в реальному часі автоматично визначати величини змін корпусу бойової машини після пострілу в трьох площинах, автоматично проводити їх опрацювання і автоматично вводити поправки в систему, що дозволить значно зменшити час на приготування до наступних пострілів, збільшити кількість пострілів за відповідний проміжок часу, а це забезпечить високу ефективність ведення вогню при одночасному забезпеченні високої точності стрільби, а також усуне імовірність ураження противником. На кресленні зображена блок-схема автоматизованої системи керування вогнем бойової машини. Автоматизована система керування вогнем бойової машини містить пульт командира 1, який входами-виходами з'єднаний з виходами-входами пульта оператора 2, інші входи-виходи якого з'єднані з цифровим каналом зв'язку 3, пульт керування командира 4, вхід якого з'єднаний з виходом відеооглядового пристрою командира 5, а перший та другий виходи відповідно з'єднані з першим входом відеооглядового пристрою командира 5 та першим входом блока управління 6, приціл навідника 7, перший вхід якого з'єднаний з цифровим каналом зв'язку 3, а другий - з першим виходом блока управління 6, другий вихід якого з'єднаний з другим входом відеооглядового пристрою командира 5, а третій вихід блока управління 6 з'єднаний з входом автомата супроводження об'єктів теплотелевізійного 8, вихід якого з'єднаний з другим входом блока управління 6, а вхід-вихід - з цифровим каналом зв'язку 3, балістичний обчислювач 9, входи-виходи якого з'єднані з виходами-входами датчиків системи керування вогнем 10, які з'єднані з цифровим каналом зв'язку 3, інші входи-виходи балістичного обчислювача 9 з'єднані з цифровим каналом зв'язку 3, а вихід - з першим входом стабілізатора озброєння 11, другий та третій входи якого відповідно з'єднані з виходом прицілу навідника 7 та виходом пульта оператора 2, а перший вихід стабілізатора озброєння 11 з'єднаний з третім входом блока управління 6, входи-виходи якого та входи-виходи стабілізатора озброєння 11 з'єднані з цифровим каналом связку 3, а другий та третій виходи стабілізатора озброєння 11 є виходами відповідно каналу вертикального наведення КВН гармати та каналу горизонтального наведення КГН гармати, систему вимірювання координат 12, вихід якої з'єднаний з четвертим входом блока управління 6, трикоординатний датчик лінійних прискорень 13 та блок розрахунку змін 2 UA 105589 C2 5 10 15 20 25 30 35 40 45 50 55 орієнтації корпусу 14, при цьому трикоординатний датчик лінійних прискорень 13 розміщений на корпусі бойової машини і з'єднаний з входом блока розрахунку змін орієнтації корпусу 14, вихід якого з'єднаний з п'ятим входом блока управління 6, а вхід-вихід з'єднаний з цифровим каналом зв'язку 3. Стабілізатор озброєння 11 містить блок керування стабілізатора 15, перший вхід якого є першим входом стабілізатора озброєння 11, а другий та третій входи його є відповідно другим та третім входами стабілізатора озброєння 11, четвертий вхід якого з'єднаний з виходом пульта управління командира 16, а п'ятий та шостий входи відповідно з'єднані з виходом пульта управління навідника 17 та розміщеним на гарматі Г бойової машини датчиком положення гармати 18, а перший вихід блока керування стабілізатора 15 є першим виходом стабілізатора озброєння 11, а другий та третій виходи блока керування стабілізатора 15 відповідно з'єднані з входом підсилювача вертикального наведення 19 та входом підсилювача горизонтального наведення 20, виходи яких відповідно з'єднані з входом двигуна вертикального наведення 21 та виходом двигуна горизонтального наведення 22, які утворюють відповідно канал вертикального наведення КВН та канал горизонтального наведення КГН гармати, а вхід-вихід блока керування стабілізатора 15 є цифровим входом - виходом стабілізатора озброєння 11. Усі блоки, що використовуються в запропонованій автоматизованій системі керування вогнем бойової машини є стандартними і виконані аналогічно, як у прототипу. Трикоординатний датчик лінійних прискорень 13 виконаний з використанням мікросхем ADXL362 або ADXL345-EP. Блок розрахунку змін орієнтації корпусу 14 виконаний на базі спеціалізованої ЕОМ з відповідним програмним забезпеченням. Автоматизована система керування вогнем бойової машини працює наступним чином. Основними режимами роботи запропонованої автоматизованої системи керування вогнем бойової машини є "Автомат" з під режимами "Автомат-Н" (з місця навідника) та "Автомат-К" (з місця командира), режим зовнішньої цілевказівки "ЗЦВ", які відбуваються аналогічно як у прототипу. Ціль супроводжують шляхом наведення дзеркала прицілу навідника 7 по вертикалі і по горизонталі ручками пульта управління навідника 17 (пульта управління командира 16) в ручному режимі, або по командах, які виробляє автомат супроводження об'єктів теплотелевізійний 8 в режимі автоматичного супроводження цілі. Сигнал з датчиків положення дзеркала прицілу навідника 7, або прицілу командира пульта командира 1 по вертикалі, надходить в стабілізатор озброєння 11, де він порівнюється з сигналом датчика положення гармати 18, який механічно з'єднаний з віссю обертання блока озброєння. Сигнал похибки підсилюється і подається в канал вертикального наведення КВН, що приводить доповертання башти гармати Γ в бік зменшення розузгодження. При відхиленні від стабілізованого положення дзеркала прицілу навідника 7 по горизонту виникає сигнал похибки, який знімається з датчика положення дзеркала прицілу навідника 7 по горизонту, підсилюється та подається в канал горизонтального наведення КГН, що приводить доповертання башти гармати Г в бік зменшення розузгодження. У відповідності до знайденої цілі на пульті командира 1 встановлюється відповідний тип снаряда. Перехід системи для роботи в режимі "Авт-Н", або "Авт-К" відбувається шляхом надходження з блока управління 6 на балістичний обчислювач 9 команди "ЗЦВ", де здійснюється розрахунок розузгодження положення лінії візування прицілу навідника 7 відносно площини горизонту, положення якої визначається по сигналу з датчика нахилу датчиків системи керування вогнем 10 з врахуванням визначеної поправки на кут місця цілі. Величина розузгодження по вертикалі надходить з блока управління 6 на автомат супроводження об'єктів теплотелевізійний 8, де виробляється сигнал керування дзеркалом в каналі вертикального наведення КВН, що приводить до руху дзеркала прицілу навідника 7 по вертикалі в бік зменшення розузгодження. Тобто забезпечується слідкування лінії візування за площиною горизонту по каналу вертикального наведення. По цифровому каналу зв'язку 3 на блок управління 6 надходить від перетворювача кут-код, який механічно з'єднаний з баштою з гарматою Г, значення кута розвороту башти відносно осі бойової машини та розраховує величину розходження між положенням башти з гарматою Г по горизонту і напрямком на ціль. Величина розузгодження надходить в автомат супроводження об'єктів теплотелевізійний 8, в якому виробляється сигнал керування дзеркалом в каналі горизонтального наведення КГН, що приводить до руху дзеркала прицілу навідника 7 по горизонталі в бік зменшення розузгодження. 3 UA 105589 C2 5 10 15 20 25 30 35 40 45 50 Після опрацювання розузгодження по каналах вертикального та горизонтального наведення КВН та КГН з похибкою не більше 0,5 т.д., визначений код передається в балістичний обчислювач 9, де проводиться розрахунок і визначення кутів прицілювання та упередження по вертикальному та горизонтальному наведеннях, які опрацьовуються стабілізатором озброєння 11. Підчас першого пострілу під дією сил від снаряду відбувається зміщення і, як наслідок, зміна орієнтації корпусу бойової машини відносно площини горизонту та азимуту, що приводить до необхідності введення у систему поправок. В зв'язку з тим в режимі "ЗЦВ" при стрільбі по невидимій цілі необхідно повторно проводити установки для стрільби з використанням зовнішніх орієнтирів або гіроскопічних датчиків горизонту та азимуту, що в існуючій системі здійснюють вручну. Для автоматизації процесу корекції положення гармати після пострілу по невидимих цілях використовується інформація з трикоординатного датчика лінійних прискорень 13, яка надходить до блока розрахунку змін орієнтації корпусу 14, де відбувається розрахунок зміни абсолютних кутів орієнтації з наступною подачею даних про необхідні доповертання гармати на стабілізатор озброєння 11 через блок управління 6. Стабілізатор озброєння 11 проводить доповертання гармати, тобто автоматично встановлює початкові установки, які були до пострілу. При значних змінах крену бойової машини та з метою більш точного визначення установок стрільби, викликаних зміною крену бойової машини, балістичний обчислювач 9 проводить повторне обчислення поправок та подає їх в стабілізатор озброєння 11 для повторної корекції. Джерела інформації: 1. Патент ФРГ № 3332795, кл. F41G5/14, 1985. 2. Патент РФ № 2444693, кл. F41G3/00, 2012. ФОРМУЛА ВИНАХОДУ Автоматизована система керування вогнем бойової машини, що містить пульт командира, який входами-виходами з'єднаний з виходами-входами пульта оператора, інші входи-виходи якого з'єднані з цифровим каналом зв'язку, пульт керування командира, вхід якого з'єднаний з виходом відеооглядового пристрою командира, а перший та другий виходи відповідно з'єднані з першим входом відеооглядового пристрою командира та першим входом блока управління, приціл навідника, перший вхід якого з'єднаний з цифровим каналом зв'язку, а другий - з першим виходом блока управління, другий вихід якого з'єднаний з другим входом відеооглядового пристрою командира, а третій вихід блока управління з'єднаний з входом автомата супроводження об'єктів теплотелевізійного, вихід якого з'єднаний з другим входом блока управління, а вхід-вихід - з цифровим каналом зв'язку, балістичний обчислювач, входи-виходи якого з'єднані з виходами-входами датчиків системи керування вогнем, які з'єднані з цифровим каналом зв'язку, інші входи-виходи балістичного обчислювача з'єднані з цифровим каналом зв'язку, а вихід - з першим входом стабілізатора озброєння, другий та третій входи якого відповідно з'єднані з виходом прицілу навідника та виходом пульта оператора, а перший вихід стабілізатора озброєння з'єднаний з третім входом блока управління, другий та третій виходи стабілізатора озброєння є виходами відповідно каналу вертикального наведення КВН гармати та каналу горизонтального наведення ΚГΉ гармати, а вхід-вихід стабілізатора озброєння та вхід-вихід блока управління з'єднані з цифровим каналом зв'язку, систему вимірювання координат, вихід якої з'єднаний з четвертим входом блока управління, яка відрізняється тим, що в неї додатково введені трикоординатний датчик лінійних прискорень та блок розрахунку змін орієнтації корпусу, при цьому трикоординатний датчик лінійних прискорень встановлений на корпусі бойової машини та з'єднаний з входом блока розрахунку змін орієнтації корпусу, вихід якого з'єднаний з п'ятим входом блока управління, а вхід-вихід з'єднаний з цифровим каналом зв'язку. 4 UA 105589 C2 Комп’ютерна верстка О. Рябко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюHrynkovych Orest Stepanovych, Lapytskyi Serhii Volodymyrovych, Oliiarnyk Bohdan Oleksiiovych
Автори російськоюГринькович Орест Степанович, Лапицкий Сергей Владимирович, Олиярник Богдан Алексеевич
МПК / Мітки
Мітки: система, керування, бойової, автоматизована, машини, вогнем
Код посилання
<a href="https://ua.patents.su/7-105589-avtomatizovana-sistema-keruvannya-vognem-bojjovo-mashini.html" target="_blank" rel="follow" title="База патентів України">Автоматизована система керування вогнем бойової машини</a>
Система керування вогнем танка
Номер патенту: 51830
Опубліковано: 16.12.2002
Автори: Єрдаков Євген Володимирович, Хандога Анатолій Максимович, Бондаренко Олександр Григорович, Мошнін Віктор Миколайович
МПК: F41G 5/00
Мітки: танка, керування, система, вогнем
Формула / Реферат:
Система керування вогнем танка, що містить привід башти, привід гармати, приціл, який складається з пульта керування, з'єднаного з приводом дзеркала прицілу, датчика кута вертикального наведення, датчика кута горизонтального наведення, які кінематично зв'язані з дзеркалом прицілу і відповідно з гарматою і баштою, балістичний обчислювач, блок керування приводами, гіротахометр вертикального наведення і гіротахометр горизонтального наведення,...
Оптико-телевізійна система керування вогнем
Номер патенту: 36182
Опубліковано: 10.10.2008
Автори: Яновський Юрій Васильович, Немчин Олександр Федорович, Медвідь Володимир Станіславович, Піронер Ян Михайлович, Колесник Костянтин Іванович, Ковальчук Лідія Ігорівна, Свириденко Анатолій Олексійович, Гузь Володимир Іванович, Протасов Володимир Георгійович, Яковлев Віталій Васильович
Мітки: система, оптико-телевізійна, вогнем, керування
Формула / Реферат:
1. Оптико-телевізійна система керування вогнем, що містить оптико-електронний модуль, блок керування механізмами системи керування вогнем, блок озброєння, привід вертикального наведення, привід горизонтального наведення, пульт командира системи керування вогнем, відеомонітор командира, електродвигун приводу вертикального наведення та електродвигун приводу горизонтального наведення, при цьому до складу оптико-електронного модуля входять...
Інтегрована система пошуку, наведення, стабілізації та керування вогнем “триада-бт”
Номер патенту: 83793
Опубліковано: 25.09.2013
Автори: Долеско Анатолій Олександрович, Яновський Юрій Іванович, Піронер Ян Михайлович, Цисарж Вячеслав Вікторович, Баранчук Олександр Іванович, Стецюк Володимир Леонтійович
МПК: F41G 5/00
Мітки: система, наведення, інтегрована, керування, вогнем, стабілізації, триада-бт, пошуку
Формула / Реферат:
Інтегрована система пошуку, наведення, стабілізації та керування вогнем "Триада-БТ", що містить оптико-електронний модуль, блок керування механізмами інтегрованої системи, привод вертикального наведення, електродвигун приводу вертикального наведення, підсилювач вертикального наведення, датчик кута місця, привод горизонтального наведення, електродвигун приводу горизонтального наведення, підсилювач горизонтального наведення, датчик...
Система керування вогнем танка
Номер патенту: 45502
Опубліковано: 15.04.2002
Автори: Бусяк Юрій Митрофанович, Походняков Валерій Георгійович, Руденко Микола Прохорович, Бондаренко Олександр Григорович, Фролов Леонід Андрійович
МПК: F41G 5/00
Мітки: танка, керування, вогнем, система
Формула / Реферат:
Система керування вогнем танка, що містить блок керування приводами, балістичний обчислювач, блок індикації, механізм заряджання, нічний приціл, денний приціл, що складається з датчика кута вертикального наведення, кінематично зв'язаного з гіростабілізатором, пульта керування, перший вихід якого з'єднаний з першим входом гіростабілізатора, пристрою введення типу балістик, пристрою введення дальності, з'єднаного з першим входом балістичного...
Система керування вогнем танка
Номер патенту: 54601
Опубліковано: 17.03.2003
Автори: Ганзера Юрій Іванович, Хандога Анатолій Максимович, Єрдаков Євген Володимирович, Касьянов Валерій Іванович, Вакуленко Володимир Вікторович, Мошнін Віктор Миколайович, Бондаренко Олександр Григорович
МПК: F41G 5/00
Мітки: керування, система, танка, вогнем
Формула / Реферат:
1. Система керування вогнем танка, яка містить приціл, привід гармати, привід башти, що складається з механізму повороту башти, виконаного з кінематично зв'язаних один з одним електромагніта механізму повороту башти, редуктора, виконавчого двигуна, вентилятора і ручного приводу, кінематично зв'язаного з редуктором електромашинного підсилювача, перший вихід якого з'єднаний з виконавчим двигуном, комутатора електромашинного підсилювача,...
Попередній патент: Пристрій для остеосинтезу переломів міжвиросткового підвищення великогомілкової кістки
Наступний патент: Мікшування аудіопотоку з нормалізацією діалогового рівня
Випадковий патент: Самофіксуючий стіновий блок із вставними елементами