Система керування вогнем танка
Номер патенту: 45502
Опубліковано: 15.04.2002
Автори: Бондаренко Олександр Григорович, Бусяк Юрій Митрофанович, Походняков Валерій Георгійович, Руденко Микола Прохорович, Фролов Леонід Андрійович
Формула / Реферат
Система керування вогнем танка, що містить блок керування приводами, балістичний обчислювач, блок індикації, механізм заряджання, нічний приціл, денний приціл, що складається з датчика кута вертикального наведення, кінематично зв'язаного з гіростабілізатором, пульта керування, перший вихід якого з'єднаний з першим входом гіростабілізатора, пристрою введення типу балістик, пристрою введення дальності, з'єднаного з першим входом балістичного обчислювача, другий вхід якого з'єднаний з пристроєм введення типу балістик і механізмом заряджання, яка відрізняється тим, що в систему керування вогнем введений блок обробки інформації, у нічний приціл введений блок індикації, другий вихід пульта керування з'єднаний з другим входом гіростабілізатора, який кінематично зв'язаний з датчиком кута горизонтального наведення, який з'єднаний з першим входом блока обробки інформації і третім входом балістичного обчислювача, четвертий вхід якого з'єднаний з датчиком кута вертикального наведення, який з'єднаний з другим входом блока обробки інформації, третій, четвертий, п'ятий і шостий входи якого з'єднані відповідно з пристроєм введення дальності, пристроєм введення типу балістик, механізмом заряджання, пристроєм дублюючого керування, а перший, другий, третій, четвертий, п'ятий, шостий виходи блока обробки інформації з'єднані відповідно з першим, другим, третім, четвертим, п'ятим, шостим входами блока індикації, причому вихід балістичного обчислювача з'єднаний з блоком керування приводами.
Текст
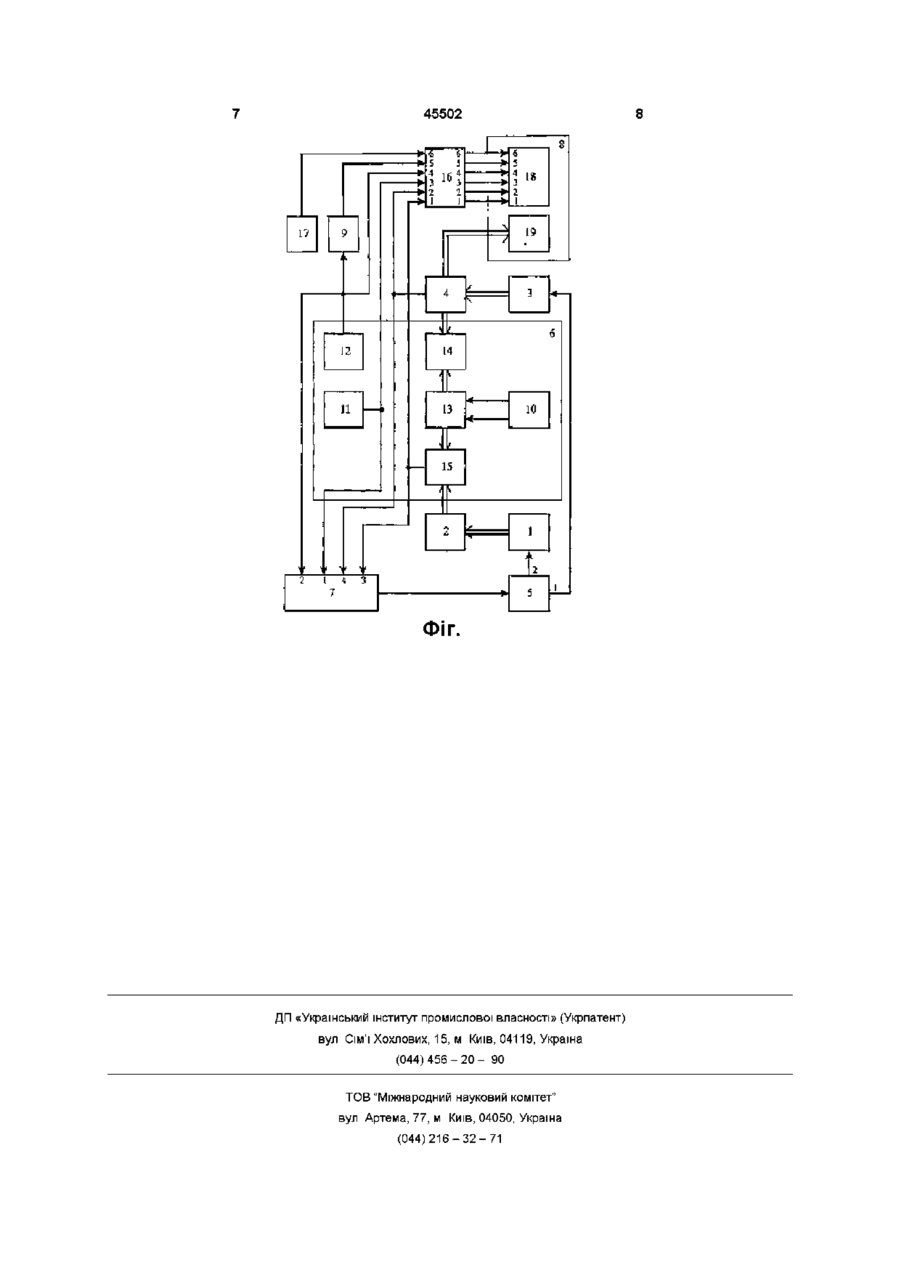
Система керування вогнем танка, що містить блок керування приводами, балістичний обчислювач, блок індикації, механізм заряджання, нічний приціл, денний приціл, що складається з датчика кута вертикального наведення, кінематично зв'язаного з гіростабілізатором, пульта керування, перший вихід якого з'єднаний з першим входом гіростабілізатора, пристрою введення типу балістик, пристрою введення дальності, з'єднаного з першим входом балістичного обчислювача, другий вхід якого з'єднаний з пристроєм введення типу балістик і механізмом заряджання, яка відрізняється тим, що в систему керування вогнем введений блок обробки інформації, у нічний приціл введений блок індикації, другий вихід пульта керування з'єднаний з другим входом гіростабілізатора, який кінематично зв'язаний з датчиком кута горизонтального наведення, який з'єднаний з першим входом блока обробки інформації і третім входом балістичного обчислювача, четвертий вхід якого з'єднаний з датчиком кута вертикального наведення, який з'єднаний з другим входом блока обробки інформації, третій, четвертий, п'ятий і шостий входи якого з'єднані ВІДПОВІДНО З пристроєм введення дальності, пристроєм введення типу балістик, механізмом заряджання, пристроєм дублюючого керування, а перший, другий, третій, четвертий, п'ятий, шостий виходи блока обробки інформації з'єднані ВІДПОВІДНО з першим, другим, третім, четвертим, п'ятим, шостим входами блока індикації, причому вихід балістичного обчислювача з'єднаний з блоком керування приводами Винахід стосується бронетанкової техніки, зокрема систем керування вогнем танка Відома система керування вогнем танка, що містить денний і нічний приціли, блок керування приводами, балістичний обчислювач Нічний приціл кінематичне зв'язаний з гарматою і денним прицілом (див "ТанкТ-64А Техническое описание и инструкция по эксплуатации", книга 1, МОП СССР, 1973г, стр 190-193) Дана система керування вогнем забезпечує стабілізацію гармати у вертикальній площині при наведенні системи на ціль і дозволяє вести стрільбу в нічних умовах Проте визначення параметрів стрільби здійснюється оператором за допомогою далекомірних шкал, шкал бічних поправок, шкал становлення кутів прицілювання, а також залежить' від фізичного стану оператора Тому при визначенні параметрів стрільби допускаються похибки і збільшується час на підготовку до пострілу Відома система керування вогнем, яка містить блок керування приводами, балістичний обчислювач у вигляді розрахункового блока з потенціометром поправок, механізм заряджання, денний і нічний приціли Денний приціл складається з блока індикації, гіростабілізатора, кінематичне зв'язаного з датчиком кута вертикального наведення, перший вихід якого з'єднаний з першим входом гіростабілізатора, а другий вихід з'єднаний з блоком керування приводами У денний приціл також входять пристрій введення типу балістик, пристрій введення дальності , який з'єднаний з першим входом балістичного обчислювача, другий вхід якого з'єднаний з пристроєм введення типу балістик і механізмом заряджання Блок індикації з'єднаний з балістичним обчислювачем, який з'єднаний з блоком керування приводами Нічний приціл містить головне дзеркало, кінематичне зв'язане з гарматою (див "СУО Комплекс 1А40 Инструкция по эксплуатации" БЛ 1 335 062 ИЭ Издание МО СССР, М , 1987г) О о ю ю 45502 У ВІДОМІЙ системі керування вогнем можна оперативно визначати тільки один параметр - кут бічного попередження, який вводиться у блок індикації Проте при визначенні кута попередження не враховуються поправки від бічного вітру, крену осі цапф гармати та ІНШІ складові, величина яких сумірна з поправкою на кутову швидкість ЦІЛІ При виборі типу боєприпасу затрачується додатковий час для знаходження на лицьовій панелі прицілу визначеного положення перемикача типу балістик, тобто збільшується час на підготовку пострілу При вимірюванні дальності використовується усереднена дальність, а у випадку помилки при її вимірюванні усереднена дальність не буде відповідати и реальному значенню Крім того, оператору не повідомляється про помилку при вимірюванні дальності, внаслідок чого при стрільбі можливі непопадання в ціль, що знижує ефективність стрільби Таким чином відома система керування вогнем танка дозволяє у денних умовах оперативно визначати тільки один параметр стрільби - кут бічного попередження У нічних умовах ведення бою така система неефективна В основу винаходу поставлено задачу удосконалення системи керування вогнем танка шляхом введення додаткових елементів і зв'язків МІЖ НИМИ, що дозволяє оперативно і точно визначати параметри стрільби, забезпечуючи підвищення точності стрільби нічних умовах Поставлена задача вирішується тим, що у відому систему керування вогнем танка, яка містить блок керування приводами, балістичний обчислювач, блок індикації, механізм заряджання, нічний приціл, денний приціл, що складається з датчика кута вертикального наведення, кінематичне зв'язаного з гіростабілізатором, пульта керування, перший вихід якого з'єднаний з першим входом гіростабілізатора, пристрою введення типу балістик, пристрою введення дальності, з'єднаного з першим входом балістичного обчислювача, другий вхід якого з'єднаний з пристроєм введення типу балістик і механізмом заряджання, згідно з винаходом, у систему керування вогнем введений блок обробки інформації, у нічний приціл введений блок інформації, другий вихід пульта керування денного прицілу з'єднаний з другим входом гіростабілізатора, який кінематичне зв'язаний з датчиком кута горизонтального наведення, який з'єднаний з першим входом блока обробки інформації і третім входом балістичного обчислювача, четвертий вхід якого з'єднаний з датчиком кута вертикального наведення, який з'єднаний з другим входом блока обробки інформації, третій, четвертий, п'ятий і шостий входи якого з'єднані ВІДПОВІДНО З пристроєм введення дальності, пристроєм введення типу балістик, механізмом заряджання, пристроєм дублюючого керування, а перший, другий, третій, четвертий, п'ятий, шостий виходи блока обробки інформації з'єднані ВІДПОВІДНО з першим, другим, третім, четвертим, п'ятим, шостим входами блока індикації, причому вихід балістичного обчислювача з'єднаний з блоком керування приводами З'єднання виходів блока обробки інформації з ВІДПОВІДНИМИ входами блока індикації та іншими елементами системи керування дозволяє вводити в блок обробки інформації електричні сигнали, які відповідають певному призначенню параметра стрільби з урахуванням статичних і динамічних поправок Сигнали, що вводяться, перетворюються в кодові сигнали, що надходять до блока індикації по каналах, що відповідають призначенню кожного електричного сигналу, за рахунок чого оперативно і точно визначаються параметри стрільби в нічних умовах ведення бою На кресленні зображена функціональна схема системи керування вогнем танка, що заявляється Система керування вогнем танка містить привід 1 башти 2, привід 3 гармати 4, які з'єднані з блоком 5 керування приводами, денний приціл 6, балістичний обчислювач 7, нічний приціл 8, механізм 9 заряджання Денний приціл 6 складається з пульта 10 керування, пристрою 11 введення дальності, пристрою 12 введення типу балістик, гіростабілізатора 13, який кінематичне зв'язаний з датчиком 14 кута вертикального наведення і датчиком 15 кута горизонтального наведення Перший і другий виходи пульта 10 керування денного прицілу 6 з'єднані ВІДПОВІДНО З першим і другим входами гіростабілізатора 13 Пристрій 11 введення дальності з'єднаний з першим входом балістичного обчислювача 7 Пристрій 12 введення типу балістик з'єднаний з другим входом балістичного обчислювача 7 і механізмом 9 заряджання Датчик 15 кута горизонтального наведення кінематичне зв'язаний з баштою 2 і з'єднаний з першим входом блока 16 обробки інформації і третім входом балістичного обчислювача 7 Датчик 14 кута вертикального наведення кінематично зв'язаний з гарматою 4 і з'єднаний з другим входом блока 16 обробки інформації та з четвертим входом балістичного обчислювача 7 Третій, четвертий, п'ятий, шостий входи блока 16 обробки інформації з'єднані ВІДПОВІДНО з пристроєм 11 введення дальності, пристроєм 12 введення типу балістик, механізмом 9 заряджання і пристроєм 17 дублюючого керування Перший, другий, третій, четвертий, п'ятий, шостий виходи блока 16 обробки інформації з'єднані ВІДПОВІДНО з першим, другим, третім, четвертим, п'ятим, шостим входами блока 18 індикації нічного прицілу 8 Вихід балістичного обчислювача 7 з'єднаний з блоком 5 керування приводами Елементи, які вводяться заново, системи керування вогнем, що заявляється, можуть бути виконані на основі типових електрорадюелементів і мікросхем Блок обробки інформації може бути виконаний на основі мікросхем типу 53 З ЛАЗ, 533ИЕ10, 594ПА1, 533ТМ9, 572ПА1А, 153УДЗ, 140УДЗ, 590КН5, 521САЗ Блок індикації може бути виконаний на основі мікросхем типу 556РТ5, 533ЛА13, 564ИК2 Система керування вогнем, що заявляється, працює таким чином При стрільбі з ходу по рухомій ЦІЛІ в нічних умовах у системі керування вмикаються в коло електроживлення денний приціл 6, нічний приціл 8, балістичний обчислювач 7, блок 5 керування приводами, пристрій 12 введення типу балістик, механізм 9 заряджання, блок 16 обробки інформації, блок 18 індикації Електричні сигнали датчика 14 кута вертикального наведення і датчика 15 кута горизонтального наведення надходять ВІДПОВІДНО до другого і першого входів блока 16 обробки ін формації і до четвертого і третього входів балістичного обчислювача 7 Електричні сигнали пристрою 12 введення типу балістик і механізму 9 заряджання надходять ВІДПОВІДНО ДО четвертого і п'ятого входів блока 16 обробки інформації і до другого входу балістичного обчислювача 7 3 першого, другого, четвертого, п'ятого виходів блока 16 обробки інформації електричні сигнали, що відповідають призначенню сигналів, що надходять від указаних вище елементів, надходять до першого, другого, четвертого, п'ятого входів блока 18 індикації При визначенні балістичним обчислювачем 7 кута прицілювання з урахуванням статичних і динамічних поправок електричний сигнал з виходу балістичного обчислювача 7 надходить до блока 5 керування приводами На виході блока 5 керування приводами формуються електричні сигнали , що надходять ВІДПОВІДНО ДО приводу 3 гармати 4 і приводу 1 башти 2 Привід 3 переміщує гармату 4, яка діє на датчик 14 кута вертикального наведення, при цьому на його виході з'являється сигнал, величина якого пропорційна величині кута прицілювання Електричний сигнал з виходу датчика 14 кута вертикального наведення через балістичний обчислювач 7 надходить до блока 5 керування приводами Електричні сигнали з виходу блока 5 керування приводами надходять до приводу З гармати 4 і приводу 1 башти 2, які переміщують гармату 4 і башту 2 на величину кута непогодження до тих пір, поки на вході блока 5 керування приводами електричний сигнал не буде рівний "0" Отже, башта 2 і гармата 4 знаходяться в узгодженому положенні з ЛІНІЄЮ візування денного прицілу 6 і нічного прицілу 8 При визначенні кута бічного попередження оператор зчитує на блоці 18 індикації інформацію про величину кута попередження та його знак і рукояткою (на кресленні не показано) пульта 10 керування через гіростабілізатор 13 діє на датчик 15 кута горизонтального наведення При цьому на його виході з'являється сигнал, величина якого пропорційна величині кута попередження Електричний сигнал з виходу датчика 15 кута горизонтального наведення через балістичний обчислювач 7 надходить до входу блока 5 керування 45502 приводами Електричні сигнали з виходу блока 5 керування приводами надходять до приводу 1 башти 2, який перемішує башту 2 до тих пір, поки на вході блока 5 керування приводами електричний сигнал не буде рівний "0" Отже, башта 2 узгоджена з ЛІНІЄЮ візування денного прицілу 6 і нічного прицілу 8 по горизонту В реальних умовах ведення бою при наведенні системи керування на рухому ціль значення кута бічного попередження буде постійно змінюватися і його нове значення кожний раз буде фіксуватися на блоці 18 індикації Оператор завжди може швидко і точно навести систему керування на ціль по горизонту, узгодивши положення башти 2 з ЛІНІЄЮ візування денного і нічного прицілів 6 і 8 Після наведення системи керування вогнем на ціль у вертикальній і горизонтальних площинах оператор вмикає в коло електроживлення пристрій 11 введення дальності Електричний сигнал з виходу пристрою 11 введення дальності надходить до першого входу балістичного обчислювача 7 і до третього входу блока 16 обробки інформації З третього виходу блока 16 обробки інформації сигнал надходить до третього входу блока 18 індикації, на якому фіксується цифрове значення дальності Одержана інформація про дальність дозволяє оператору в разі помилки, допущеної при її вимірюванні, зробити повторне вимірювання Таким чином оператор швидко і точно за допомогою системи керування вогнем наводить гармату 4 на ціль і, при наявності на блоці 18 індикації інформації щодо типу балістики та щодо готовності гармати 4 до стрільби, здійснює постріл по ЦІЛІ У разі переходу керування системою керування вогнем від оператора до командира танка останній вмикає в колі електроживлення пристрій 17 дублюючого керування Електричний сигнал з виходу пристрою 17 дублюючого керування надходить через блок 16 обробки інформації до шостого входу блока 18 індикації При цьому на блоці 18 індикації фіксується інформація про перехід керування системою до командира танка Таким чином система керування вогнем танка, що заявляється, дозволяє оперативно і точно вести стрільбу з ходу в нічних умовахпо рухомій ЦІЛІ 45502 5 5 16 2 1 1 4 4 1 J 4 1 1 18 19 9 4 I r 6 14 \2 І 11 \ 13 і 0 і 15 і 1 і 1 [ і ' L 2 3 5 1 ФІГ. ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна (044)456-20- 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71
ДивитисяДодаткова інформація
Автори англійськоюBusiak Yurii Mytrofanovych, Frolov Leonid Andriiovych, Bondarenko Oleksandr Hryhorovych, Rudenko Mykola Prokhorovych
Автори російськоюБусяк Юрий Митрофанович, Фролов Леонид Андреевич, Бондаренко Александр Григорьевич, Руденко Николай Прохорович
МПК / Мітки
МПК: F41G 5/00
Мітки: керування, вогнем, система, танка
Код посилання
<a href="https://ua.patents.su/4-45502-sistema-keruvannya-vognem-tanka.html" target="_blank" rel="follow" title="База патентів України">Система керування вогнем танка</a>
Система керування вогнем танка
Номер патенту: 32632
Опубліковано: 15.02.2001
Автори: Фролов Леонід Андрійович, Бусяк Юрій Митрофанович, Руденко Микола Прохорович
МПК: F41G 5/00
Мітки: система, вогнем, керування, танка
Текст:
...з відомим контуром регулювання, що включає датчик кута вертикального наведення, балістичний обчислювач та привід наведення гармати, дозволило не тільки усунути ручні операції та автоматизувати процес узгодження лінії візування нічного прицілу з віссю каналу ствола гармати при подачі сигналу з виходу да тчика кута вертикального наведення і тим самим добитися скорочення часу для приведення . системи у стан го товності , а отже, і...
Система вказування цілі танка
Номер патенту: 37299
Опубліковано: 15.05.2001
Автори: Фролов Леонід Андрійович, Таран Юрій Іванович, Коробейніков Олег Павлович, Асауленко Володимир Павлович
МПК: F41G 5/00
Мітки: вказування, танка, система, цілі
Формула / Реферат:
Система вказання цілі танка, що містить башту та командирську башточку з автономними приводами і кульковими опорами (погонами), прилад спостереження та датчик узгодженого положення командирської башточки, яка відрізняється тим, що датчик узгодженого положення виконаний в вигляді редуктора з обертовим трансформатором, причому ротор обертового трансформатора через редуктор, зубчатий вінець погона командирської башточки, карданний вал та привід...
Система для гідропневматичної очистки стекол оглядових приладів командирської башточки танка
Номер патенту: 29545
Опубліковано: 15.11.2000
Автори: Руденко Микола Прохорович, Фролов Леонід Андрійович
МПК: B60S 1/46, B60S 1/06, F41H 5/00
Мітки: система, стекол, гідропневматичної, командирської, очистки, башточки, приладів, танка, оглядових
Текст:
...вхо ду електpопpивода командиpської башточки, а дpугий вихiд – до кеpуючих входiв 2 29545 пеpшого, дp уго го та тpетього ключiв, пpи цьому вихiд суматоpа з'єднаний з тpетiм входом електpопpивода командиpської башточки, пеpший вхiд суматоpа з'єднаний з фоpмувачем зони нечутливостi, дp угий вхiд якого чеpез пеpший ключ пiдключений до пеpшого вихо ду пульта кеpування, вхiд фа зочутливого пiдсилювача пiдключений до виходу датчика положення...
Система гідропневмоочистки стекол оглядових приладів командирської башточки танка
Номер патенту: 29548
Опубліковано: 15.11.2000
Автори: Оробинський Василь Миколайович, Ісаєв Володимир Васильович, Фролов Леонід Андрійович, Руденко Микола Прохорович
Мітки: стекол, гідропневмоочистки, приладів, командирської, система, танка, оглядових, башточки
Текст:
...круговий огляд при будь-яких запиленості та забрудненні, які мають місце в реальних умовах експлуа тації об'єкта, що підви щує ві рогідність виявлення цілей на полі бою, підвищує живучість танка та ефективність його ви користання. Суть ви нахо ду пояснюється кресленням, на якому представлена схе ма системи гідропневмоочистки з конструкцією приймального та передавального пристроїв. Систе ма гідропневмоочистки стекол оглядових приладів 1...
Система керування механізованим заряджанням
Номер патенту: 32618
Опубліковано: 15.02.2001
Автори: Бестік Микола Іванович, Коробейніков Олег Павлович, Петраченко Любов Парфенівна, Бакушин Анатолій Олексійович, Кас'ян Валерій Іванович
Мітки: керування, механізованим, система, заряджанням
Текст:
...насосна установка 3 у вигляді гідронасосу, золотникової коробки, поповнюючого , баку та шлангів, описана на стор.100...106; - пристрій 4 ви давання снаряду в площин у заряджання містить конвеєр з лотками для снаря дів зі стопором і ме ханізмом повороту , золотни ком стопору, гідромотором і електромагнітом, описаний на стор 84...87, 100...107; - пристрій 5 стопоріння гармати на куті заряжання у вигляді гідромеханічного стопору гармати,...
Попередній патент: Пристрій і спосіб для регулювання тиску в шинах транспортного засобу
Наступний патент: Спосіб отримання нижчих олефінів, реактор для піролізу вуглеводнів і апарат для загартування газів піролізу
Випадковий патент: Пристрій для вибору медіани