Багаточастотний фазовий спосіб вимірювання дальностей об’єктів у радіодіапазоні
Номер патенту: 108172
Опубліковано: 25.03.2015
Автори: Любчик Віталій Романович, Лантвойт Максим Олегович, Клепіковський Андрій Валерійович, Шинкарук Олег Миколайович
Формула / Реферат
Багаточастотний фазовий спосіб вимірювання дальностей в радіодіапазоні, що полягає у зондуванні об'єктів вимірювання гармонійними сигналами у заданому діапазоні частот, вимірюванні амплітуд і фазових зсувів сумарних сигналів відбитих від усіх об'єктів на усіх зондуючих частотах, розрахунку дальностей та коефіцієнтів відбиття усіх об'єктів, причому перша зондуюча частота вибирається із умови ![]() , де Lmax - максимальна відстань до об’єкта, який відрізняється тим, що зондуючий сигнал перетворюють методами амплітудної модуляції в область високих частот за допомогою отриманого сигналу, проводять зондування об'єктів, після чого відбитий сигнал, за допомогою амплітудної демодуляції, перетворюють в область низьких частот, проводять вимірювання фазових зсувів, амплітуд сигналів і обчислюють дальності та коефіцієнти відбиття.
, де Lmax - максимальна відстань до об’єкта, який відрізняється тим, що зондуючий сигнал перетворюють методами амплітудної модуляції в область високих частот за допомогою отриманого сигналу, проводять зондування об'єктів, після чого відбитий сигнал, за допомогою амплітудної демодуляції, перетворюють в область низьких частот, проводять вимірювання фазових зсувів, амплітуд сигналів і обчислюють дальності та коефіцієнти відбиття.
Текст
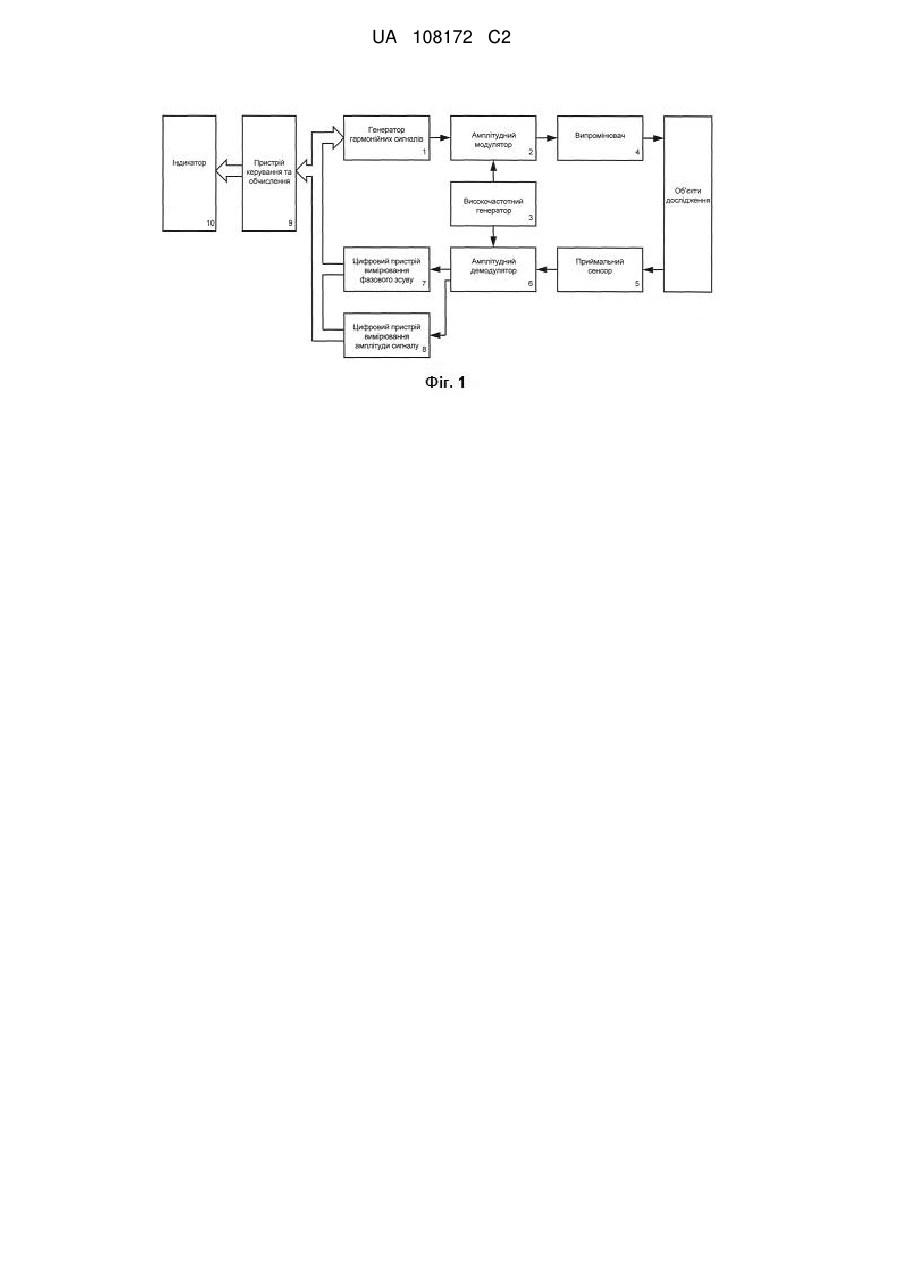
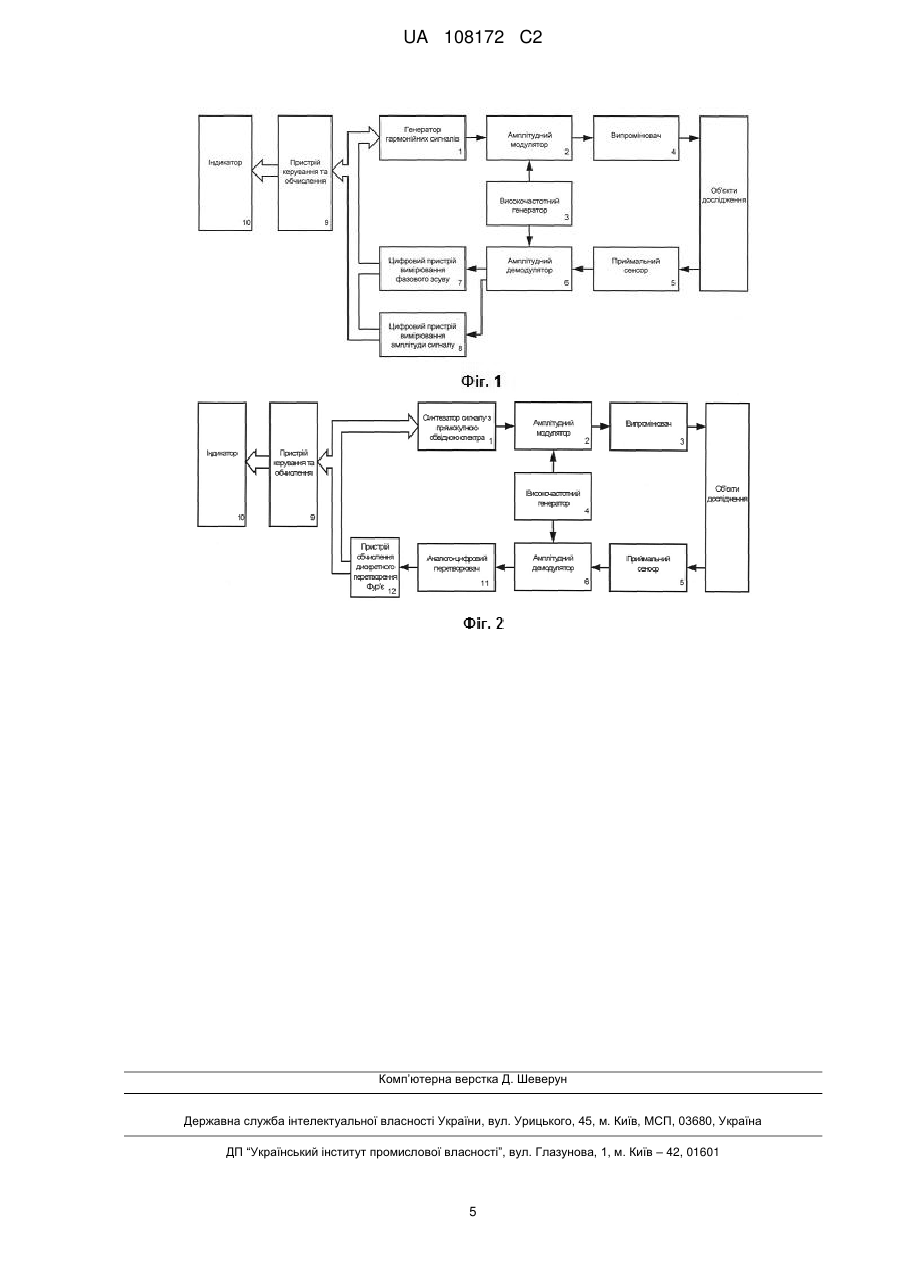
Реферат: Багаточастотний фазовий спосіб вимірювання дальностей в радіодіапазоні належить до радіотехніки, радіолокації та радіонавігації, зокрема - до пристроїв радіочастотного вимірювання дальності (радіодальномірів). Спосіб дозволяє перетворювати зондуючий сигнал методами амплітудної модуляції в область високих частот за допомогою отриманого сигналу, проводити зондування об'єктів, після чого відбитий сигнал, за допомогою амплітудної демодуляції, перетворювати в область низьких частот та проводити вимірювання фазових зсувів, амплітуд сигналів і обчислювати дальності та коефіцієнти відбиття. Технічним результатом є зменшення масо-габаритних параметрів приймально-передавальної апаратури, підвищення точності вимірювання дальності. UA 108172 C2 UA 108172 C2 5 Винахід належить до області радіотехніки, радіолокації та радіонавігації, зокрема - до пристроїв радіочастотного вимірювання дальності (радіодальномірів). Відомо, що дальності до об'єктів вимірюються шляхом зондування об'єктів імпульсними періодичними сигналами із радіочастотним заповненням сигналами високої частоти. Зондуючий сигнал відбивається від усіх об'єктів, що знаходяться на шляху розповсюдження променя. Відбиті сигнали повертаються до прийомного пристрою або антени із часовими затримками пропорційними дальностям до об'єктів: i 10 15 2ri , (1) c ri - дальність де до і-го об'єкта; c - швидкість поширення електромагнітного випромінювання. Для визначення часової затримки відбитого сигналу за виразом (1), проводять демодуляцію сигналу і виділяють його обвідну. Сигнали відбиті від кожного об'єкта розділяються за часом приходу обвідної сигналу. Відповідно, дальності до кожного об'єкта можна розрахувати за виразом: ri i c . (2) 2 Недоліком даного аналога є наявність "мертвої зони" - мінімальна дальність виявлення об'єктів. Наступним недоліком є обмежена розрізнювальна спроможність. Обидва недоліки обумовлюються обмеженою тривалістю зондуючого імпульсу. "Мертва зона" дорівнює: r"мз" 20 25 30 35 40 45 де з - тривалість зондуючого імпульсу. Розрізнювальна спроможність визначається мінімальною дальністю, на якій розрізнюється два об'єкти: rpc з c . (4) Зменшення "мертвої зони" та покращення розрізнювальної спроможності вимагає зменшення тривалості зондуючого імпульсу, що, в свою чергу, призводить до значного розширення частотного діапазону. Радіочастотні сигнали формуються методами амплітудної модуляції, що дозволяє зондувати об'єкти сигналами в області високих частот. А це, в свою чергу, - зменшити розміри передавальної та приймальної антен, зменшити масо-габаритні параметри приймальнопередавальної апаратури, підвисити точність вимірювання дальності, знизити енергію зондуючого сигналу. Недоліком, окрім "мертвої зони", також є значний пік-фактор зондуючого імпульсного сигналу. Чим менша тривалість зондуючого імпульсу, тим більший пік-фактор, при незмінному періоді повторення імпульсів. Велике значення пік-фактора призводить до значного впливу завад на імпульсну послідовність. Будь-який сигнал завади сприймається імпульсним дальноміром як сигнал відбитий від об'єкта (1. Финкельштейн М.И. / М.И Финкельштейн. Основы радиолокации: // Учебник для вузов. - М.: Радио и связь, 1983. - 536 с. 2. Исследование объектов с помощью пикосекундных импульсов / Г.В. Глебович, А.В. Андриянов, Ю.В. Введенский и др. // Под ред. Г.В. Глебовича. - М.: Радио и связь, 1984, 256 с. 3. Вопросы перспективной радиолокации. Коллективная монографія / Под ред. А.В. Соколова. - М.: Радиотехника. 2003. - 512 с.). Аналогом пристрою є частотний спосіб вимірювання дальностей (Сосулин Ю.Г. Теоретические основы радиолокации и радионавигации: / Ю.Г. Сосулин // Учеб. Пособие для вузов. - М.: Радио и связь, 1992. - 304). Даний спосіб передбачає формування лінійночастотного модульованого сигналу (ЛЧМ-сигналу). Внаслідок часової затримки відбитого сигналу відносно зондуючого спостерігається постійний частотний зсув f . Знаходження дальності відбувається за виразом: R 50 55 з c , (3) 2 cfб . (5) 4 fД Fм Для вимірювання дальності частотним методом ЛЧМ-сигнал формується в області високих частот з метою, аналогічною до використання радіочастотного заповнення імпульсного методу. Недоліками пристрою-аналога є значний частотний діапазон для забезпечення достатньої точності та розрізнювальної спроможності, складність математичної моделі для розрахунку дальностей до декількох об'єктів. Даний спосіб використовується для вимірювання дальності до одного об'єкта. Прототипом пристрою є винахід багаточастотний фазовий спосіб вимірювання дальностей (Любчик В.Р. / В.Р Любчик, О.І. Гнатюк. Вимірювання дальностей до трьох об'єктів // Вісник ТУП. 1 UA 108172 C2 5 10 15 - 2005. - № 2. - С. 183-188). Спосіб полягає у зондуванні об'єктів у деякому діапазоні частот гармонійними сигналами. Сигнали відбиваються від кожного об'єкта і повертаються на приймальну систему, яка розташована в місці розташування передавальної системи. При цьому приймальна система реєструє суму сигналів, відбитих від кожного об'єкта. Для розділення цих сигналів шукають на амплітудно-частотній характеристиці сумарного відбитого сигналу точки мінімуму, які є точками протифази сигналу відбитому від одного об'єкта до сумарного сигналу. Послідовно виключаючи сигнали відбиті від одного об'єкта в усьому діапазоні частот знаходять характеристику сигналу що є сумою сигналів, відбитих від двох об'єктів. Недоліком прототипу є те, що спектр частот зондуючих сигналів даного способу знаходиться в області відеодіапазону, тобто від 0 Гц до fв , а це призводить до необхідності використання великогабаритних передавальних і приймальних антен та приймально-передавальної апаратури, складності прийому відбитих зондуючих сигналів. В основу винаходу поставлено задачу зменшення масо-габаритних параметрів приймальнопередавальної апаратури, підвищення точності вимірювання дальності багаточастотним фазовим способом. Ознаки винаходу: зондуючий сигнал; моделюючий сигнал; амплітудна модуляція; амплітудна демодуляція; коефіцієнти відбиття. Спільними ознаками винаходу та прототипу є зондуючий сигнал. Відмінність винаходу від прототипу наведена в табл. 20 Таблиця Порівняння винаходу та прототипу за ознаками Ознаки зондуючий сигнал моделюючий сигнал амплітудна модуляція амплітудна демодуляція коефіцієнти відбиття 25 30 Прототип відеодіапазон ні ні ні ні Винахід радіодіапазон так так так так Визначення термінів, які використовуються при описі винаходу: зондуючий, моделюючий сигнал, амплітудна демодуляція, фазовий зсув. Теоретичні передумови здійснення способу, що заявляється. Поставлена задача вирішується тим, що застосовується несуча частота, яка описується виразом: sн t Aн cos2Ft (6) Модулюючий сигнал на і-ій частоті описується виразом: si t Aм cos2fit (7) Для зондування використовується N частот. Тоді модулюючий сигнал описується виразом: sм t A м N cos2f t . (8) i i 1 35 При амплітудній модуляції, спектр частот переноситься в область високих частот. Таким чином, в спектрі модульованого сигналу для кожної гармоніки модулюючого сигналу отримуємо три гармоніки з частотами F fi , F , F fi . При проходженні зондуючого сигналу від антени до об'єкта, він відбивається від об'єкта, повертається до прийомної антени, сигнал набуває фазовий зсув, пропорційний подвоєній відстані від станції до об'єкта. Також фазовий зсув пропорційний довжині хвилі зондуючого сигналу. Тоді для всіх гармонік фазові зсуви будуть наступні: ін 4 40 l F fi , 0 4 l F , ів 4 l F fi . (9) с с с При відбитті від об'єкта, амплітуда не буде змінюватись, тому як діапазон частот зондуючого сигналу незначний. Тоді сигнал, відбитий від одного об'єкта, який повернувся до приймача, описується виразом: l l s2 t Aн k cos 2Ft 4 F Aм k cos 2F fi t 4 F fi с с l Aм k cos 2F fi t 4 F fi , (10) с 2 UA 108172 C2 де k - коефіцієнт відбиття об'єкта. Для зворотного перетворення в область низьких частот перемножується відбитий сигнал на несучу частоту та проводиться фільтрація високочастотних складових. В результаті залишаються лише низькочастотні: 5 2 s2 t Aн k 1 l l l cos 4 F Aм Aн k cos 4 F cos 2fit 4 fi . (11) 2 с с с При зондуванні декількох об'єктів, відповідно до принципу суперпозицій, в результаті відбиття і зворотного перетворення, отримуємо суму гармонійних сигналів з однаковою частотою і різними фазовими зсувами: 2 s2 t n Aн k 10 15 20 25 30 35 40 45 50 1 l l l cos 4 F Aм Aн k1 cos 4 F cos 2fit 4 1 fi 2 с с с l l Aм Aн k 2 cos 4 F cos 2fit 4 2 fi ... с с l l Aм Aн kn cos 4 F cos 2fit 4 n fi . (12) с с Отже, перетворення зондуючого сигналу в діапазон радіочастот і назад не приводить до втрати вимірювальної інформації про дальності об'єктів. Приклад 1. Для реалізації даного способу пропонуються структурні схеми пристроїв. Перший варіант схеми (фіг. 1) складається із наступних блоків: генератора гармонійних сигналів із ступеневою зміною частоти 1, амплітудного модулятора 2, випромінювача 3, високочастотного генератора 4, приймального сенсора 5, амплітудного демодулятора 6, цифрового пристрою вимірювання фазового зсуву 7, цифрового пристрою вимірювання амплітуди сигналу (або діючого значення) 8, пристрою обчислення 9, індикатора 10. Приклад 2. Другий варіант схеми (фіг. 2) складається з наступних блоків: синтезатора сигналу з прямокутною обвідною спектра 1, амплітудного модулятора 2, випромінювача 3, високочастотного генератора 4, приймального сенсора 5, амплітудного демодулятора 6, аналого-цифрового перетворювача 7, пристрою дискретного перетворення Фур'є 8, пристрою обчислення 9, індикатора 10. Приклад 3. Розглядаємо два об'єкти. Дальності до кожного об'єкта l1 500 м та l2 700 м. При зондуванні об'єктів використовується радіосигнал з несучою частотою F 1 ГГц. Для формування сітки частот в області радіочастот використовуються гармонійні сигнали з початковою частотою f1 5 кГц і кроком зміни частоти fi fi1 5 кГц. Застосовується амплітудна модуляція для трансформації спектра зондуючих частот в область високих частот. За вказаних умов максимальна вимірювана дальність 30 км. Для вимірювання дальності за багаточастотним фазовим методом двох об'єктів необхідно використання 4 зондуючих частот, відповідно до [6]. При трансформації спектра зондуючих гармонійних сигналів на несучу частоти отримуємо дев'ять частот: F+f1=1.000005 ГТц, F+f2=1.00001 ГГц, F+f3=1.000015 ГГц, F+f4=1.00002 ГГц, F=1 ГГц, F-f1=0.999995 ГГц, F-f2=0.99999 ГГц, F-f3=0.999985 ГГц, F-f4=0.99998 ГГц. Амплітуди сигналів по потужності приймаємо рівними 1 Вт. Амплітуда несучої частоти по потужності 20 Вт. При зондуванні двох об'єктів сигналами з цими частотами отримуємо гармонійні сигнали із відповідними фазовими зсувами та амплітудами: при F+f1: 1+=-118.47°; a1+=17.38 Вт; при F+f2: 2+=-111.55°; а2+=17.06 Вт; при F+f3: 3+=-104.63°; а3+=16.74 Вт; при F+f4: 4+=-97.73°; a4+=16.41 Вт; при F: 0=-90.84°; a0=16.08 Вт; при F-f1: 1-=-83.96°; а1-=15.74 Вт; при F-f2: 2-=-77.10°; а2-=15.39 Вт; при F-f3: 3-=-70.25°; а3-=15.04 Вт; при F-f4: 4-=-63.42; а4=14.67 Вт. Після зворотної трансформації сумарних зондуючих гармонійних сигналів в область низьких частот на нульову частоту, отримуємо фазові зсуви та амплітуди сигналів: при f1: 1=-152.55°; а1=5.43; при f2: 2=-146.06°; а2=4.76; при f3: 3=-139.79°; а3=4.09; при f4: 4=-133.90°; а4=3.43. 3 UA 108172 C2 5 10 15 20 Підстановка отриманих значень фазових зсувів та амплітуд в математичний модуль багаточастотного фазового методу вимірювання дальності об'єктів дає значення дальностей: l1=500.001 м, l2=699.999 м. Отримані дальності відповідають початковим даним із похибкою не більше 0.001 м. Для реалізації даного способу пропонуються структурні схеми пристроїв. Перший варіант схеми (фіг. 1) складається із наступних блоків: генератора гармонійних сигналів із ступеневою зміною частоти 1, амплітудного модулятора 2, високочастотного генератора 3, випромінювача 4, приймального сенсора 5, амплітудного демодулятора 6, цифрового пристрою вимірювання фазового зсуву 7, цифрового пристрою вимірювання амплітуди сигналу (або діючого значення) 8, пристрою обчислення 9, індикатора 10. Другий варіант схеми (фіг. 2) складається з наступних блоків: синтезатора сигналу з прямокутною обвідною спектра 1, амплітудного модулятора 2, випромінювача 3, високочастотного генератора 4, приймального сенсора 5, амплітудного демодулятора 6, аналого-цифрового перетворювача 11, пристрою дискретного перетворення Фур'є 12, пристрою обчислення 9, індикатора 10. Технічний результат: багаточастотний фазовий спосіб вимірювання дальностей в радіодіапазоні дозволяє перетворювати зондуючий сигнал методами амплітудної модуляції в область високих частот, за допомогою отриманого сигналу, проводити зондування об'єктів, після чого відбитий сигнал, за допомогою амплітудної демодуляції, перетворювати в область низьких частот та проводити вимірювання фазових зсувів, амплітуд сигналів і обчислювати дальності та коефіцієнти відбиття багаточастотним фазовим способом. ФОРМУЛА ВИНАХОДУ 25 Багаточастотний фазовий спосіб вимірювання дальностей в радіодіапазоні, що полягає у зондуванні об'єктів вимірювання гармонійними сигналами у заданому діапазоні частот, вимірюванні амплітуд і фазових зсувів сумарних сигналів відбитих від усіх об'єктів на усіх зондуючих частотах, розрахунку дальностей та коефіцієнтів відбиття усіх об'єктів, причому перша зондуюча частота вибирається із умови 1 2Lm ax , де Lmax - максимальна відстань до 30 об’єкта, який відрізняється тим, що зондуючий сигнал перетворюють методами амплітудної модуляції в область високих частот за допомогою отриманого сигналу, проводять зондування об'єктів, після чого відбитий сигнал, за допомогою амплітудної демодуляції, перетворюють в область низьких частот, проводять вимірювання фазових зсувів, амплітуд сигналів і обчислюють дальності та коефіцієнти відбиття. 4 UA 108172 C2 Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюShynkaruk Oleh Mykolaiovych, Lubchyk Vitalii Romanovych, Lantvoit Maksym Olegovych, Klepikovskyi Andrii Valeriiovych
Автори російськоюШинкарук Олег Николаевич, Любчик Виталий Романович, Лантвойт Максим Олегович, Клепиковский Андрей Валерьевич
МПК / Мітки
МПК: G01S 13/00
Мітки: об'єктів, вимірювання, радіодіапазоні, багаточастотний, фазовий, спосіб, дальностей
Код посилання
<a href="https://ua.patents.su/7-108172-bagatochastotnijj-fazovijj-sposib-vimiryuvannya-dalnostejj-obehktiv-u-radiodiapazoni.html" target="_blank" rel="follow" title="База патентів України">Багаточастотний фазовий спосіб вимірювання дальностей об’єктів у радіодіапазоні</a>
Частотно-фазовий спосіб вимірювання швидкості звуку в матеріалах
Номер патенту: 45913
Опубліковано: 25.11.2009
Автор: Борисов Віктор Михайлович
МПК: G01N 29/04
Мітки: вимірювання, частотно-фазовий, звуку, швидкості, матеріалах, спосіб
Формула / Реферат:
Частотно-фазовий спосіб вимірювання швидкості звуку в матеріалах на базі прозвучування, за яким проводять вимірювання зсуву фаз у зразку на двох частотах та визначають різницю цих частот, який відрізняється тим, що вимірювання проводять на двох довільних частотах, знаходять різницю зсувів фаз у зразку на цих частотах, а швидкість звуку знаходять як добуток бази прозвучування на відношення різниці частот вимірювання до різниці зсуву фаз на...
Фазовий спосіб вимірювання швидкості звуку
Номер патенту: 31823
Опубліковано: 25.04.2008
Автори: Соколовський Ярослав Іванович, Сторожук Олександр Леонідович, Борисов Віктор Михайлович
МПК: G01N 29/00
Мітки: фазовий, спосіб, звуку, вимірювання, швидкості
Формула / Реферат:
Спосіб вимірювання швидкості звуку, при якому в одному перерізі зразка матеріалу збуджують зондуючий акустичний сигнал, а в другому, на відомій відстані, приймають, для зменшення похибки вимірювання компенсують час затримки сигналу в каналі вимірювання, який відрізняється тим, що вимірюють частоту і різницю фаз коливань в точках збудження і прийому, а швидкість звуку знаходять по результатах вимірювань.
Фазовий спосіб вимірювання відстані до нерухомого предмета і пристрій для його здійснення
Номер патенту: 21472
Опубліковано: 16.12.1997
Автори: Ментковський Юзеф Леонович, Кондратов Владислав Тимофійович, Дубровний Віктор Опанасович, Скрипник Юрій Олексійович, Головко Дмитро Богданович
МПК: G01C 3/08
Мітки: фазовий, нерухомого, предмета, пристрій, відстані, спосіб, здійснення, вимірювання
Формула / Реферат:
1. Фазовий спосіб вимірювання відстані до нерухомого предмета, який полягає у створенні зондуючого променя з двох оптичних когерентних випромінювань, близьких за частотою, опроміненні контрольованого предмета зондуючим променем, прийомі відбитого променя, його фотоелектричному перетворенні, виділенні електричного сигналу різницевої частоти, вимірюванні різниці фаз електричних сигналів і визначенні відстані за аналітичним співвідношенням,...
Фазовий спосіб вимірювання модулів пружності, зсуву та логарифмічного декременту коливань
Номер патенту: 34722
Опубліковано: 26.08.2008
Автор: Борисов Віктор Михайлович
МПК: G01L 1/10
Мітки: фазовий, пружності, вимірювання, коливань, модулів, логарифмічного, зсуву, декременту, спосіб
Формула / Реферат:
Фазовий спосіб визначення модуля пружності вздовж волокон деревини, модулів зсуву в радіальній і тангентальній площинах за частотами резонансних коливань та логарифмічного декременту коливань за шириною резонансних піків, що полягає в збудженні у зразку з вільними кінцями поздовжніх і поперечних коливань, який відрізняється тим, що визначення частот вимірювань частоти здійснюють за фазою коливань відносно збуджуючої ці коливання дії.
Фазовий спосіб вимірювання різниці тисків та пристрій для його здійснення
Номер патенту: 54667
Опубліковано: 17.03.2003
Автор: Шевченко Сергій Якович
МПК: G01L 9/12
Мітки: тисків, різниці, фазовий, спосіб, пристрій, здійснення, вимірювання
Формула / Реферат:
1. Спосіб вимірювання різниці тисків, що полягає в збудженні у камері з вимірювальною мембраною коливань, який відрізняється тим, що вимірюють різницю фаз між збуджуючими коливаннями та коливаннями мембрани, а про різницю тисків судять по величині цієї різниці фаз.2. Спосіб по п. 1, який відрізняється тим, що з допомогою мембрани індукують електричне поле і вимірюють різницю фаз між цим полем і сигналом, що збуджує коливання у...
Попередній патент: Пристрій підвіски та кільцевий охолоджуючий пристрій, що містить пристрій підвіски
Наступний патент: Кришка люка оглядового колодязя
Випадковий патент: Похідні еритроміцину, спосіб їх одержання та фармацевтична композиція на їх основі