Безредукторний електропривід стрілочного переводу шпального типу
Номер патенту: 109159
Опубліковано: 10.08.2016
Автори: Буряковський Сергій Геннадійович, Маслій Артем Сергійович, Маслій Андрій Сергійович, Любарський Борис Григорович
Формула / Реферат
1. Безредукторний електропривід стрілочного переводу шпального типу, що включає електродвигун з електронним блоком автоматичного керування, регулятор швидкості, які розміщені у корпусі, що імітує шпалу та виконаний у вигляді порожнистого металевого бруса з кришкою, а також містить вертикальні і повздовжню тяги, гостряки рейок, шарнірні з'єднання та безконтактні датчики положення гостряків рейок, що встановлені з зовнішньої сторони кожної рамної рейки, який відрізняється тим, що електропривід стрілочного переводу являє собою абсолютно жорстку систему, електродвигун виконаний як лінійний електродвигун індукторного типу або у вигляді електромагніта з пружинами, причому лінійний електродвигун, що виконаний у вигляді електромагніта, складається з двох електромагнітів та двох пружин, які розташовані на поверхні статора електромагніта, а кожний електромагніт з пружиною встановлений по краях шпали, для реверсивної роботи, вертикальні і повздовжня тяги, що зв'язані між собою шарнірними з'єднаннями, являють собою кінематичну ланку електроприводу, а електронний блок автоматичного керування електродвигуном оснащений додатково регулятором положення гостряків рейок.
2. Безредукторний електропривід стрілочного переводу шпального типу за п. 1, який відрізняється тим, що він додатково оснащений запірним пристроєм, що зв'язаний з кінематичною ланкою електроприводу.
Текст
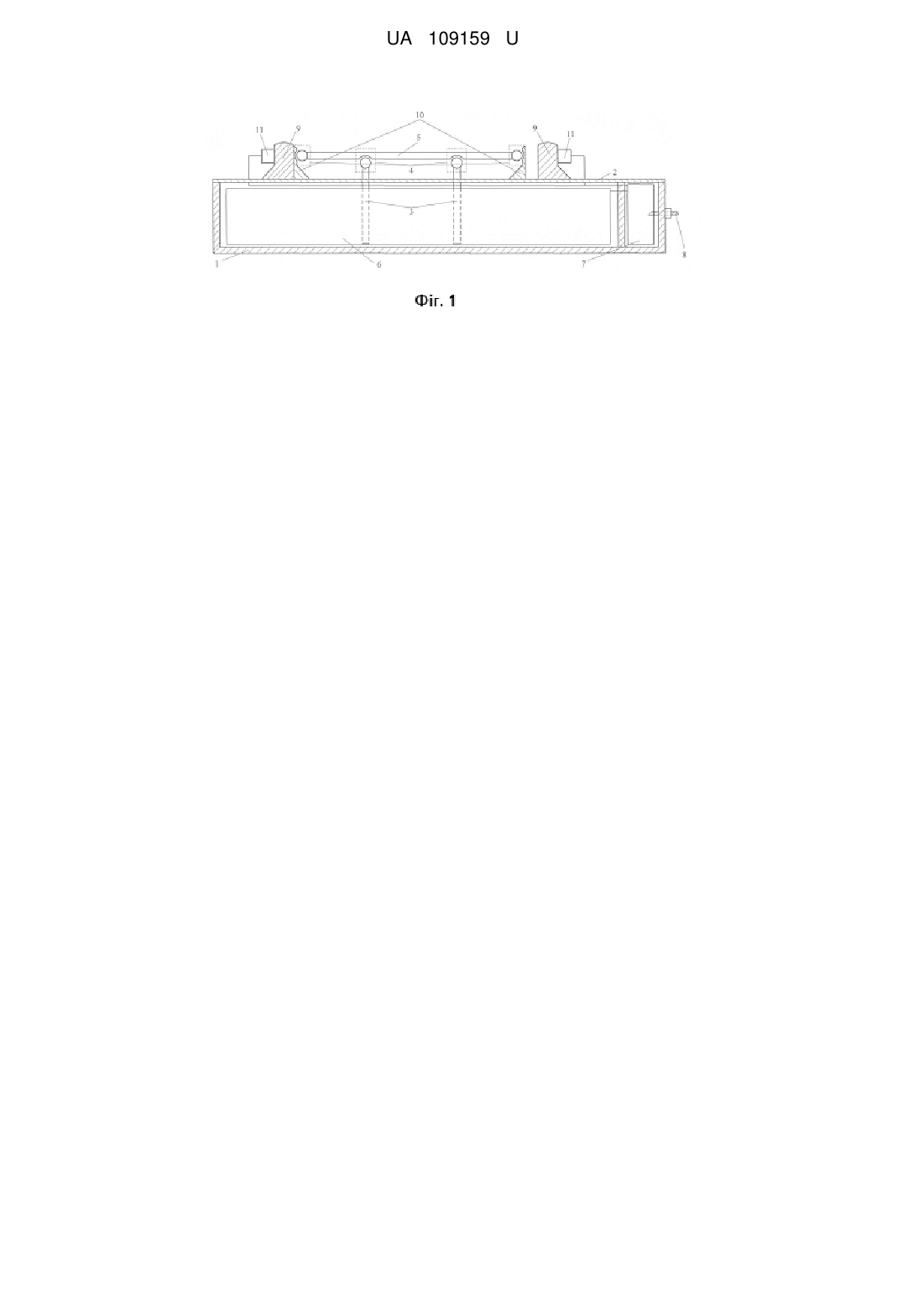
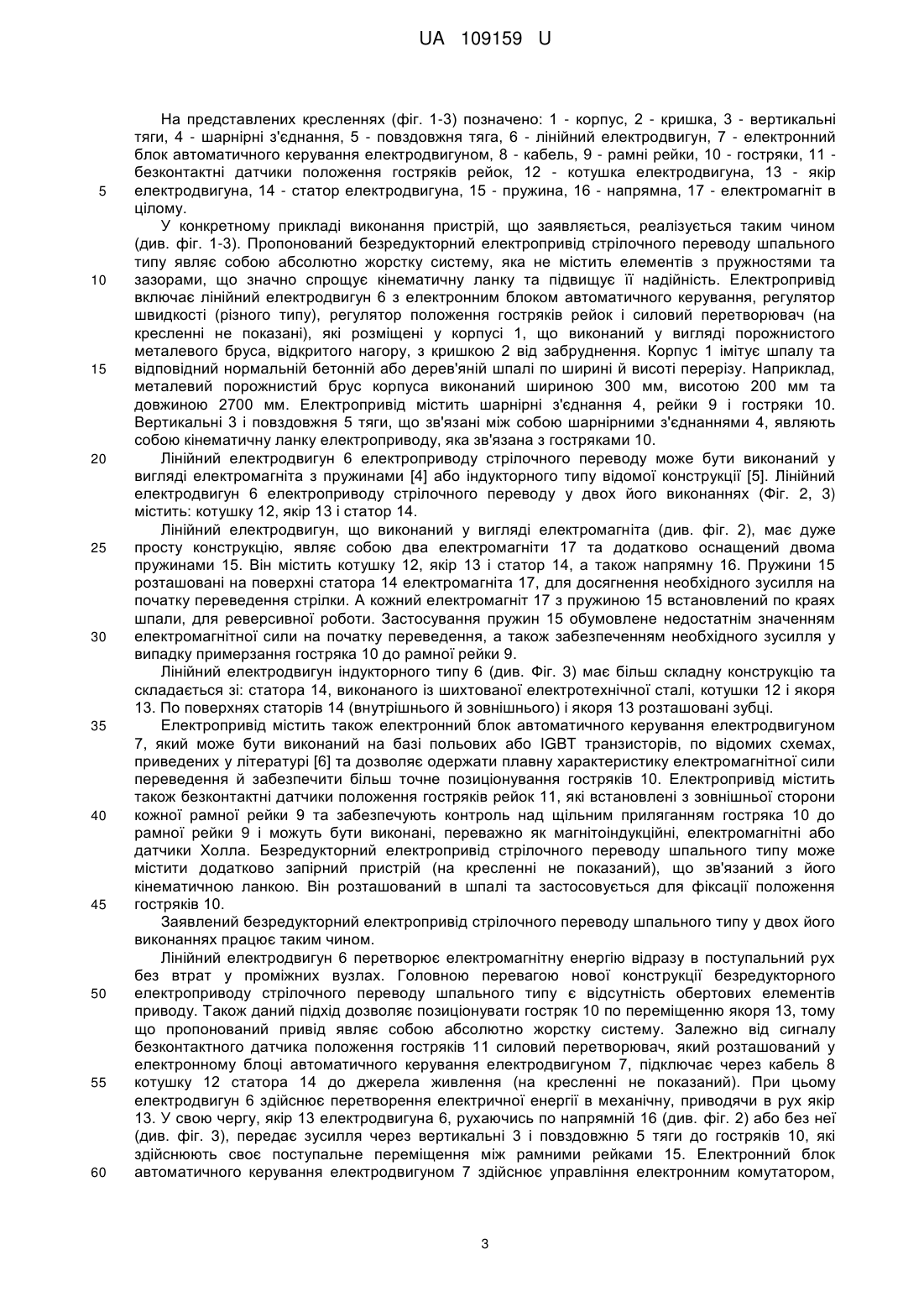
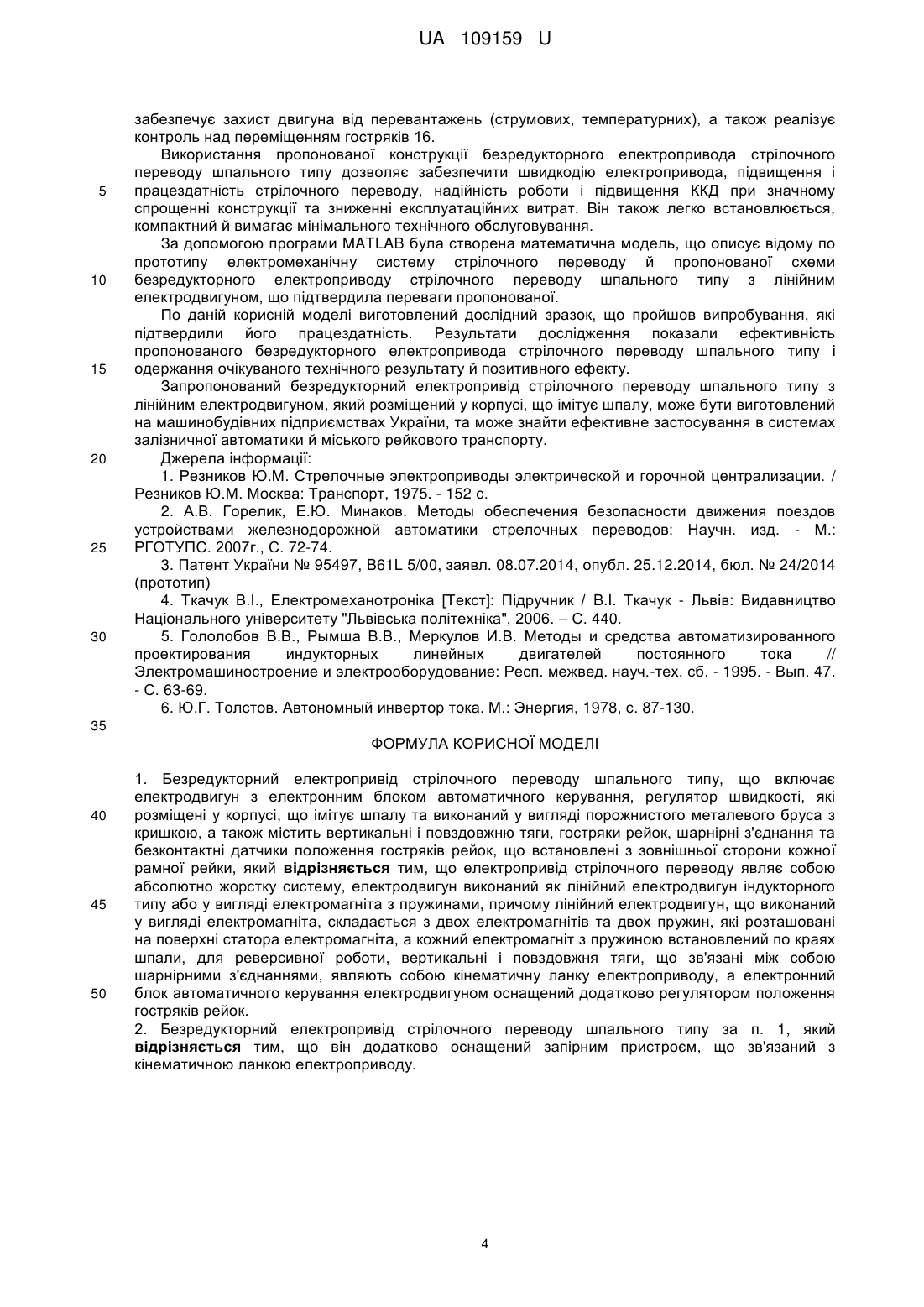
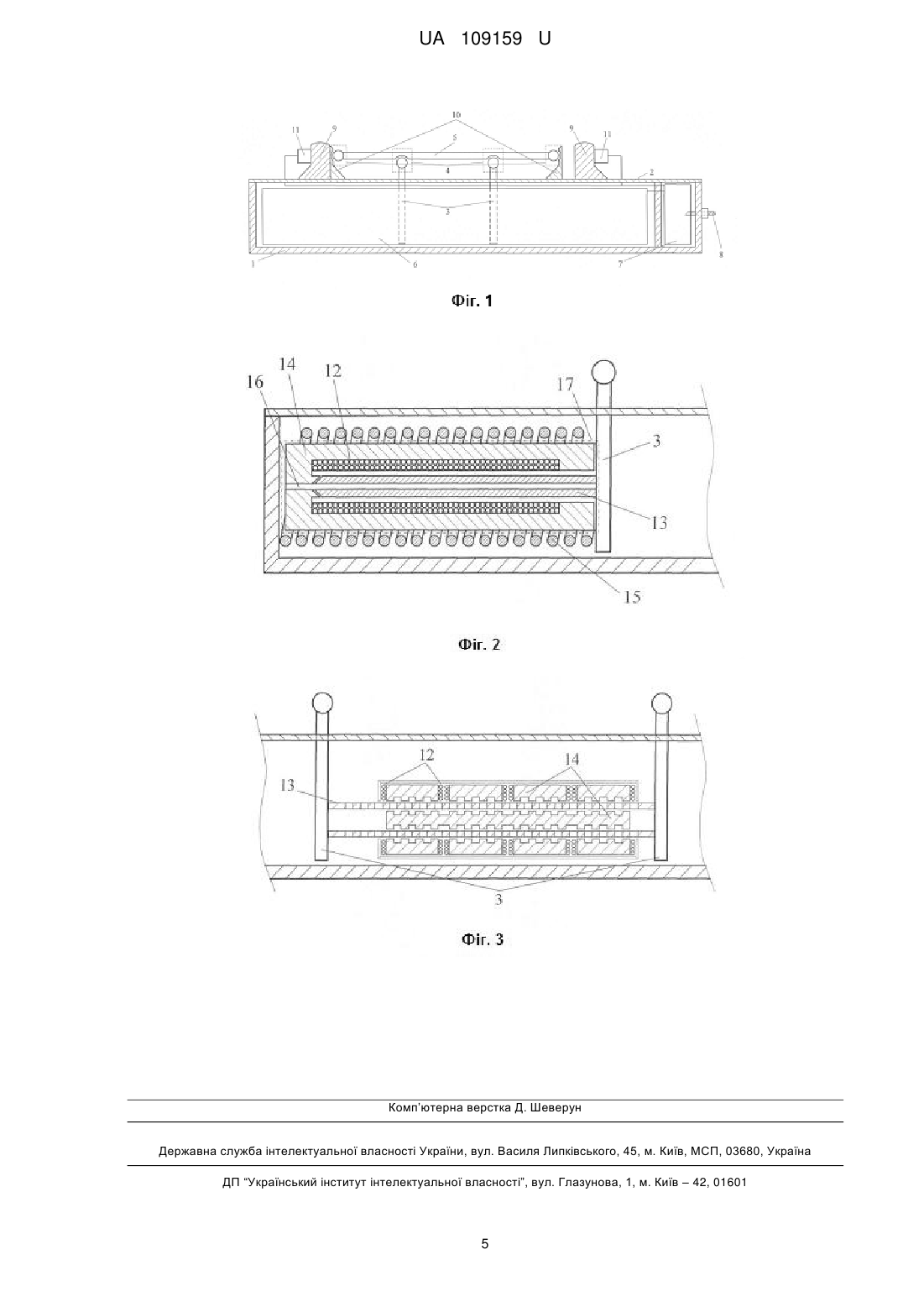
Реферат: Безредукторний електропривід стрілочного переводу шпального типу включає електродвигун з електронним блоком автоматичного керування, регулятор швидкості, які розміщені у корпусі, що імітує шпалу та виконаний у вигляді порожнистого металевого бруса з кришкою. Містить також вертикальні і повздовжню тяги, гостряки рейок, шарнірні з'єднання та безконтактні датчики положення гостряків рейок, що встановлені з зовнішньої сторони кожної рамної рейки. Електропривід стрілочного переводу являє собою абсолютно жорстку систему, електродвигун виконаний як лінійний електродвигун індукторного типу або у вигляді електромагніта з пружинами. При цьому лінійний електродвигун, що виконаний у вигляді електромагніта, складається з двох електромагнітів та двох пружин, які розташовані на поверхні статора електромагніта, а кожний електромагніт з пружиною встановлений по краях шпали для реверсивної роботи. Вертикальні і повздовжня тяги, що зв'язані між собою шарнірними з'єднаннями, являють собою кінематичну ланку електроприводу, а електронний блок автоматичного керування електродвигуном оснащений додатково регулятором положення гостряків рейок. UA 109159 U (12) UA 109159 U UA 109159 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до пристроїв залізничної автоматики, а саме до безредукторних електроприводів стрілочних переводів шпального типу й може бути використана в залізничному рейковому транспорті й міському, у тому числі у метрополітені. Основним елементом системи залізничної автоматики є стрілочний перевід. Відомі стрілочні електроприводи, що містять змонтовані в загальному корпусі електродвигун, знижуючий багатоступінчастий механічний редуктор із фрикційною муфтою зчеплення, головний вал із шестірнею, що знаходиться в рейковому зачепленні з робочим шибером, автоперемикачем ножового типу, контрольними лінійками [1]. Поряд з відомими достоїнствами ці пристрої мають ряд недоліків, обумовлених складністю конструкції, наявністю великої кількості швидкообертових вузлів і деталей, елементів ковзання, що вимагають інтенсивного змащення, та мають підвищений знос, імовірність заклинювання шибера й інших елементів. Як наслідок, все це знижує надійність і термін служби електропривода, приводить до зниження ресурсу роботи електропривода, зниження надійності високих експлуатаційних витрат та вимагає проведення великої кількості ремонтних робіт. Відомий стрілочний електропривід типу ЕВІ Switch 2000 компанії "Бомбард'є Транспортейшн", що призначений для руху поїздів по стрілці в прямому напрямку зі швидкостями до 350 км/год. [2]. Цей стрілочний електропривід типу ЕВІ Switch 2000 виконаний невзрізного типу в шпальному виконанні. Електропривід має модульну конструкцію, яка дозволяє провадити більш швидкий ремонт без вилучення системи зі шпали, та розчіплюючий механізм, який виключає пошкодження привода у випадку взрізу. Електропривід типу ЕВІ Switch 2000 складається з корпуса у вигляді порожнистого металевого бруса, що імітує шпалу, з кришкою, розподільної коробки, асинхронного електродвигуна з перетворювачем частоти, передавального механізму - вузла лінійного привода, що містить одноступінчастий редуктор, вузла замикача й перемикання, вузла контролю положення замикаючого пристрою, механізму замикання замикаючого пристрою й положення контрольних тяг, робочих тяг, кришки. Також містить гостряки, безконтактні датчики положення гостряків, що розташовані в корпусі порожнистому металевому брусі. До недоліків відомого стрілочного електроприводу типу ЕВІ Switch 2000 слід віднести таке. Використання асинхронного електродвигуна призводить до того, що при виході з ладу однієї з його фаз, він не працює. Також наявність одноступінчастого редуктора дає додаткові втрати й необхідність його постійного обслуговування. Є складність системи керування, виконаної у вигляді перетворювача частоти, залежність моменту й швидкості якоря від напруги живлення, що створює умови для відбою гостряків стрілок. Все це в цілому призводить до складності конструкції, що знижує надійність і термін служби, та вимагає проведення великої кількості ремонтних робіт, що веде до збільшенню експлуатаційних витрат та його подорожчанню. Найбільш близьким по технічній суті до пропонованого є електропривід стрілочного переводу [3], який прийнятий за прототип, що включає електродвигун, розміщений у корпусі, що імітує шпалу, та виконаний у вигляді порожнистого металевого бруса з кришкою, вертикальні тяги, передавальний механізм, гостряки, безконтактні датчики положення гостряків, в якому як електродвигун використаний вентильно-індукторний електродвигун, який забезпечений блоком управління з регулятором швидкості на базі фазілогіки, при цьому електродвигун через муфту з'єднаний з передавальним механізмом, який виконаний у вигляді пари гвинт-гайка кочення, що по суті є редуктором, а також електродвигун забезпечений блоком допоміжного обладнання, що включає датчик положення ротора. Недоліком відомого стрілочного електроприводу по прототипу є складна його конструкція в цілому та використання вентильно-індукторного електродвигуна, який має обертові елементи, що приводить до зниження надійності роботи та терміну служби. А наявність редуктора у вигляді передавального механізму, що виконаний як пара гвинт-гайка кочення, дає додаткові втрати й необхідність його постійного обслуговування. В цілому, все це призводить до зниження швидкодії електропривода стрілочного переводу, його надійності, ККД, збільшенню експлуатаційних витрат і його подорожчанню та зменшення терміну служби електроприводу. В основу корисної моделі поставлена задача вдосконалення електроприводу стрілочного переводу шпального типу, який виконаний безредукторним та у якому, за рахунок використання іншого типу електродвигуна - лінійного, відсутності обертових елементів приводу, відсутності редуктора, нового взаємного розміщення вузлів і елементів, встановлення нових зв'язків між ними та додаткових пристроїв, забезпечується значне спрощення конструкції, зменшення габаритів, компактність та підвищення надійності роботи внаслідок зменшення загального числа елементів, поліпшення експлуатаційних характеристик електропривода та підвищення його ККД, підвищення швидкодії роботи електропривода стрілочного переводу завдяки зменшенню часу переведення гостряків, що дозволяє досягти збільшення строку служби електроприводу 1 UA 109159 U 5 10 15 20 25 30 35 40 45 50 55 стрілочного переводу, підвищення надійності роботи й безпеки стрілочного переводу в цілому, а також зниження експлуатаційних витрат за рахунок відсутності вузлів, що вимагають обслуговування, та підвищення зручності проведення ремонтних робіт при низькій трудомісткості обслуговування. Поставлена задача вирішується тим, що у безредукторному електроприводі стрілочного переводу шпального типу, що включає електродвигун з електронним блоком автоматичного керування, регулятор швидкості, які розміщені у корпусі, що імітує шпалу та виконаний у вигляді порожнистого металевого бруса з кришкою, а також містить вертикальні і повздовжню тяги, гостряки рейок, шарнірні з'єднання та безконтактні датчики положення гостряків рейок, що встановлені з зовнішньої сторони кожної рамної рейки, відповідно до корисної моделі, електропривід стрілочного переводу являє собою абсолютно жорстку систему, електродвигун виконаний як лінійний електродвигун індукторного типу або у вигляді електромагніта з пружинами, причому лінійний електродвигун, що виконаний у вигляді електромагніта, складається з двох електромагнітів та двох пружин, які розташовані на поверхні статора електромагніта, а кожний електромагніт з пружиною встановлений по краях шпали, для реверсивної роботи, вертикальні і повздовжня тяги, що зв'язані між собою шарнірними з'єднаннями, являють собою кінематичну ланку електроприводу, а електронний блок автоматичного керування електродвигуном оснащений додатково регулятором положення гостряків рейок. Крім того, в окремих випадках виконання безредукторного електроприводу стрілочного переводу шпального типу, що заявляється, він додатково оснащений запірним пристроєм, що зв'язаний з кінематичною ланкою електроприводу. У результаті використання корисної моделі, що заявляється, забезпечується одержання технічного результату, який полягає у значному спрощенні конструкції, зменшенні габаритів, компактності та підвищенні надійності роботи внаслідок зменшення загального числа елементів, поліпшенні експлуатаційних характеристик електроприводу та підвищення його ККД, підвищенні швидкодії роботи електроприводу стрілочного переводу завдяки зменшенню часу переведення гостряків. Застосування лінійного електродвигуна замість ротаційного вентильно-індукторного електродвигуна (як у прототипі) у складі безредукторного електроприводу стрілочного переводу шпального типу, дозволяє уникнути проміжної ланки перетворення обертальної енергії в поступову, що значно спрощує конструкцію електроприводу та дозволяє виконати його компактним в цілому внаслідок зменшення загального числа елементів, а також підвищує ККД, швидкодію роботи стрілочного переводу завдяки зменшенню часу переведення гостряків. Це знижує загальні витрати завдяки спрощенню монтажу й технічного обслуговування. Виконання кінематичної ланки електроприводу у вигляді вертикальних і повздовжньої тяг, що зв'язані між собою шарнірними з'єднаннями, дозволяє виключити передавальний механізм у вигляді пари гвинт-гайка кочення (як у прототипі) та зменшити втрати на тертя кочення, зменшує знос і знижує експлуатаційні витрати на обслуговування за рахунок відсутності вузлів, що це вимагають, та спрощує в цілому конструкцію електропривода стрілочного переводу, що зменшує його вартість й збільшує надійність. Забезпечення електронного блока автоматичного керування регулятором положення гостряків рейок та силовим перетворювачем, дозволяє в цілому підвищити надійність керування електроприводом. Додаткове оснащення електроприводу запірним пристроєм, що зв'язаний з його кінематичною ланкою, дозволяє уникнути випадкового зміщення гостряків, що може призвести до аварійної ситуації. У цілому, всі відмінні ознаки пристрою, що заявляється, є суттєвими й необхідними для досягнення нового технічного результату. За наявними у заявника відомостями, сукупність суттєвих ознак, що характеризують суть корисної моделі, що заявляється, не відома з рівня техніки, що дозволяє зробити висновок про відповідність корисної моделі критерію "новизна". Корисна модель, що заявляється, може бути неодноразово здійснена й виготовлена відомими в галузі залізничної автоматики, способами з використанням відомих засобів, що дозволяє зробити висновок про її відповідність критерію "промислова придатність". Таким чином, корисна модель, що заявляється, відповідає всім умовам її патентоспроможності. Суть корисної моделі пояснюється кресленнями, де на фіг. 1 схематично зображено розташування устаткування в безредукторному стрілочному переводі шпального типу, на фіг. 2 - схематично представлений лінійний електродвигун електроприводу стрілочного переводу, який виконаний у вигляді електромагніту, а на фіг. 3 - лінійний електродвигун електроприводу стрілочного переводу індукторного типу. 2 UA 109159 U 5 10 15 20 25 30 35 40 45 50 55 60 На представлених кресленнях (фіг. 1-3) позначено: 1 - корпус, 2 - кришка, 3 - вертикальні тяги, 4 - шарнірні з'єднання, 5 - повздовжня тяга, 6 - лінійний електродвигун, 7 - електронний блок автоматичного керування електродвигуном, 8 - кабель, 9 - рамні рейки, 10 - гостряки, 11 безконтактні датчики положення гостряків рейок, 12 - котушка електродвигуна, 13 - якір електродвигуна, 14 - статор електродвигуна, 15 - пружина, 16 - напрямна, 17 - електромагніт в цілому. У конкретному прикладі виконання пристрій, що заявляється, реалізується таким чином (див. фіг. 1-3). Пропонований безредукторний електропривід стрілочного переводу шпального типу являє собою абсолютно жорстку систему, яка не містить елементів з пружностями та зазорами, що значно спрощує кінематичну ланку та підвищує її надійність. Електропривід включає лінійний електродвигун 6 з електронним блоком автоматичного керування, регулятор швидкості (різного типу), регулятор положення гостряків рейок і силовий перетворювач (на кресленні не показані), які розміщені у корпусі 1, що виконаний у вигляді порожнистого металевого бруса, відкритого нагору, з кришкою 2 від забруднення. Корпус 1 імітує шпалу та відповідний нормальній бетонній або дерев'яній шпалі по ширині й висоті перерізу. Наприклад, металевий порожнистий брус корпуса виконаний шириною 300 мм, висотою 200 мм та довжиною 2700 мм. Електропривід містить шарнірні з'єднання 4, рейки 9 і гостряки 10. Вертикальні 3 і повздовжня 5 тяги, що зв'язані між собою шарнірними з'єднаннями 4, являють собою кінематичну ланку електроприводу, яка зв'язана з гостряками 10. Лінійний електродвигун 6 електроприводу стрілочного переводу може бути виконаний у вигляді електромагніта з пружинами [4] або індукторного типу відомої конструкції [5]. Лінійний електродвигун 6 електроприводу стрілочного переводу у двох його виконаннях (Фіг. 2, 3) містить: котушку 12, якір 13 і статор 14. Лінійний електродвигун, що виконаний у вигляді електромагніта (див. фіг. 2), має дуже просту конструкцію, являє собою два електромагніти 17 та додатково оснащений двома пружинами 15. Він містить котушку 12, якір 13 і статор 14, а також напрямну 16. Пружини 15 розташовані на поверхні статора 14 електромагніта 17, для досягнення необхідного зусилля на початку переведення стрілки. А кожний електромагніт 17 з пружиною 15 встановлений по краях шпали, для реверсивної роботи. Застосування пружин 15 обумовлене недостатнім значенням електромагнітної сили на початку переведення, а також забезпеченням необхідного зусилля у випадку примерзання гостряка 10 до рамної рейки 9. Лінійний електродвигун індукторного типу 6 (див. Фіг. 3) має більш складну конструкцію та складається зі: статора 14, виконаного із шихтованої електротехнічної сталі, котушки 12 і якоря 13. По поверхнях статорів 14 (внутрішнього й зовнішнього) і якоря 13 розташовані зубці. Електропривід містить також електронний блок автоматичного керування електродвигуном 7, який може бути виконаний на базі польових або IGBT транзисторів, по відомих схемах, приведених у літературі [6] та дозволяє одержати плавну характеристику електромагнітної сили переведення й забезпечити більш точне позиціонування гостряків 10. Електропривід містить також безконтактні датчики положення гостряків рейок 11, які встановлені з зовнішньої сторони кожної рамної рейки 9 та забезпечують контроль над щільним приляганням гостряка 10 до рамної рейки 9 і можуть бути виконані, переважно як магнітоіндукційні, електромагнітні або датчики Холла. Безредукторний електропривід стрілочного переводу шпального типу може містити додатково запірний пристрій (на кресленні не показаний), що зв'язаний з його кінематичною ланкою. Він розташований в шпалі та застосовується для фіксації положення гостряків 10. Заявлений безредукторний електропривід стрілочного переводу шпального типу у двох його виконаннях працює таким чином. Лінійний електродвигун 6 перетворює електромагнітну енергію відразу в поступальний рух без втрат у проміжних вузлах. Головною перевагою нової конструкції безредукторного електроприводу стрілочного переводу шпального типу є відсутність обертових елементів приводу. Також даний підхід дозволяє позиціонувати гостряк 10 по переміщенню якоря 13, тому що пропонований привід являє собою абсолютно жорстку систему. Залежно від сигналу безконтактного датчика положення гостряків 11 силовий перетворювач, який розташований у електронному блоці автоматичного керування електродвигуном 7, підключає через кабель 8 котушку 12 статора 14 до джерела живлення (на кресленні не показаний). При цьому електродвигун 6 здійснює перетворення електричної енергії в механічну, приводячи в рух якір 13. У свою чергу, якір 13 електродвигуна 6, рухаючись по напрямній 16 (див. фіг. 2) або без неї (див. фіг. 3), передає зусилля через вертикальні 3 і повздовжню 5 тяги до гостряків 10, які здійснюють своє поступальне переміщення між рамними рейками 15. Електронний блок автоматичного керування електродвигуном 7 здійснює управління електронним комутатором, 3 UA 109159 U 5 10 15 20 25 30 забезпечує захист двигуна від перевантажень (струмових, температурних), а також реалізує контроль над переміщенням гостряків 16. Використання пропонованої конструкції безредукторного електропривода стрілочного переводу шпального типу дозволяє забезпечити швидкодію електропривода, підвищення і працездатність стрілочного переводу, надійність роботи і підвищення ККД при значному спрощенні конструкції та зниженні експлуатаційних витрат. Він також легко встановлюється, компактний й вимагає мінімального технічного обслуговування. За допомогою програми MATLAB була створена математична модель, що описує відому по прототипу електромеханічну систему стрілочного переводу й пропонованої схеми безредукторного електроприводу стрілочного переводу шпального типу з лінійним електродвигуном, що підтвердила переваги пропонованої. По даній корисній моделі виготовлений дослідний зразок, що пройшов випробування, які підтвердили його працездатність. Результати дослідження показали ефективність пропонованого безредукторного електропривода стрілочного переводу шпального типу і одержання очікуваного технічного результату й позитивного ефекту. Запропонований безредукторний електропривід стрілочного переводу шпального типу з лінійним електродвигуном, який розміщений у корпусі, що імітує шпалу, може бути виготовлений на машинобудівних підприємствах України, та може знайти ефективне застосування в системах залізничної автоматики й міського рейкового транспорту. Джерела інформації: 1. Резников Ю.М. Стрелочные электроприводы электрической и горочной централизации. / Резников Ю.М. Москва: Транспорт, 1975. - 152 с. 2. А.В. Горелик, Е.Ю. Минаков. Методы обеспечения безопасности движения поездов устройствами железнодорожной автоматики стрелочных переводов: Научн. изд. - М.: РГОТУПС. 2007г., С. 72-74. 3. Патент України № 95497, B61L 5/00, заявл. 08.07.2014, опубл. 25.12.2014, бюл. № 24/2014 (прототип) 4. Ткачук В.І., Електромеханотроніка [Текст]: Підручник / B.I. Ткачук - Львів: Видавництво Національного університету "Львівська політехніка", 2006. – С. 440. 5. Гололобов В.В., Рымша В.В., Меркулов И.В. Методы и средства автоматизированного проектирования индукторных линейных двигателей постоянного тока // Электромашиностроение и электрооборудование: Респ. межвед. науч.-тех. сб. - 1995. - Вып. 47. - С. 63-69. 6. Ю.Г. Толстов. Автономный инвертор тока. М.: Энергия, 1978, с. 87-130. 35 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 1. Безредукторний електропривід стрілочного переводу шпального типу, що включає електродвигун з електронним блоком автоматичного керування, регулятор швидкості, які розміщені у корпусі, що імітує шпалу та виконаний у вигляді порожнистого металевого бруса з кришкою, а також містить вертикальні і повздовжню тяги, гостряки рейок, шарнірні з'єднання та безконтактні датчики положення гостряків рейок, що встановлені з зовнішньої сторони кожної рамної рейки, який відрізняється тим, що електропривід стрілочного переводу являє собою абсолютно жорстку систему, електродвигун виконаний як лінійний електродвигун індукторного типу або у вигляді електромагніта з пружинами, причому лінійний електродвигун, що виконаний у вигляді електромагніта, складається з двох електромагнітів та двох пружин, які розташовані на поверхні статора електромагніта, а кожний електромагніт з пружиною встановлений по краях шпали, для реверсивної роботи, вертикальні і повздовжня тяги, що зв'язані між собою шарнірними з'єднаннями, являють собою кінематичну ланку електроприводу, а електронний блок автоматичного керування електродвигуном оснащений додатково регулятором положення гостряків рейок. 2. Безредукторний електропривід стрілочного переводу шпального типу за п. 1, який відрізняється тим, що він додатково оснащений запірним пристроєм, що зв'язаний з кінематичною ланкою електроприводу. 4 UA 109159 U Комп’ютерна верстка Д. Шеверун Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
Мітки: електропривід, типу, безредукторний, шпального, стрілочного, переводу
Код посилання
<a href="https://ua.patents.su/7-109159-bezreduktornijj-elektroprivid-strilochnogo-perevodu-shpalnogo-tipu.html" target="_blank" rel="follow" title="База патентів України">Безредукторний електропривід стрілочного переводу шпального типу</a>
Електропривід стрілочного переводу

Номер патенту: 95497
Опубліковано: 25.12.2014
Автори: Буряковський Сергій Геннадійович, Маслій Андрій Сергійович, Маслій Артем Сергійович
МПК: B61L 5/00
Мітки: стрілочного, електропривід, переводу
Формула / Реферат:
1. Електропривід стрілочного переводу, що містить електродвигун, розміщений у корпусі, що імітує шпалу, та виконаний у вигляді порожнього металевого бруса з кришкою, вертикальні тяги, передавальний механізм, гостряки, безконтактні датчики положення гостряків, який відрізняється тим, що як електродвигун використано вентильно-індукторний електродвигун, який забезпечений блоком управління з регулятором швидкості на базі фазі-логіки, при цьому...
Пристрій для дистанційної індикації відстані між гостряком і рамною рейкою стрілочного переводу
Номер патенту: 69811
Опубліковано: 15.09.2004
Автори: Парфьонов Володимир Іванович, Аніщенко Михайло В'ячеславович
МПК: B61L 7/00
Мітки: пристрій, відстані, рейкою, переводу, індикації, рамною, гостряком, дистанційно, стрілочного
Формула / Реферат:
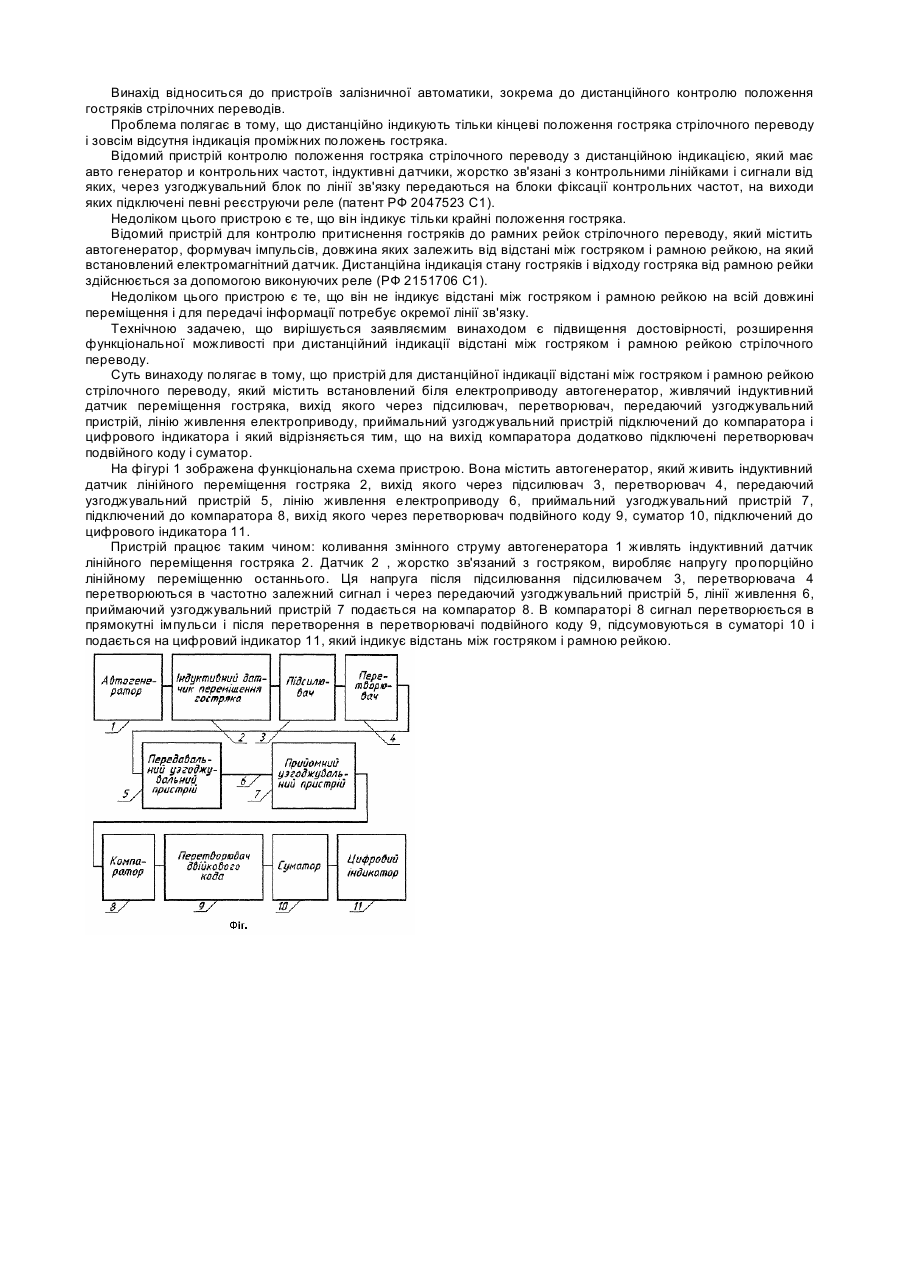
Пристрій для дистанційної індикації відстані між гостряком і рамною рейкою стрілочного переводу, який містить встановлений біля електроприводу автогенератор, живлячий індуктивний датчик переміщення гостряка, вихід якого через підсилювач, перетворювач, передаючий узгоджувальний пристрій, лінію живлення електроприводу, приймальний узгоджувальний пристрій підключений до компаратора і цифрового індикатора, який відрізняється тим, що на вихід...
Спосіб дистанційної діагностики стану стрілочного переводу з електроприводом змінного струму
Номер патенту: 69057
Опубліковано: 16.08.2004
Автор: Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: стрілочного, діагностики, електроприводом, спосіб, переводу, стану, змінного, струму, дистанційно
Формула / Реферат:
Спосіб дистанційної діагностики стану стрілочного переводу з електроприводом змінного струму, при якому виділяють, осцилографують і аналізують коливання потужності в ланцюзі навантаження електроприводу, який відрізняється тим, що безперервно виділяють тільки активну і миттєву потужність, наприклад, за допомогою датчика Холла, а потім детектують і осцилографують криву навантаження і по характеру зміни її гармонік роблять висновок про стан...
Пристрій для діагностики параметрів стрілочного переводу
Номер патенту: 69812
Опубліковано: 15.09.2004
Автор: Парфьонов Володимир Іванович
МПК: B61L 7/00
Мітки: переводу, стрілочного, діагностики, пристрій, параметрів
Формула / Реферат:
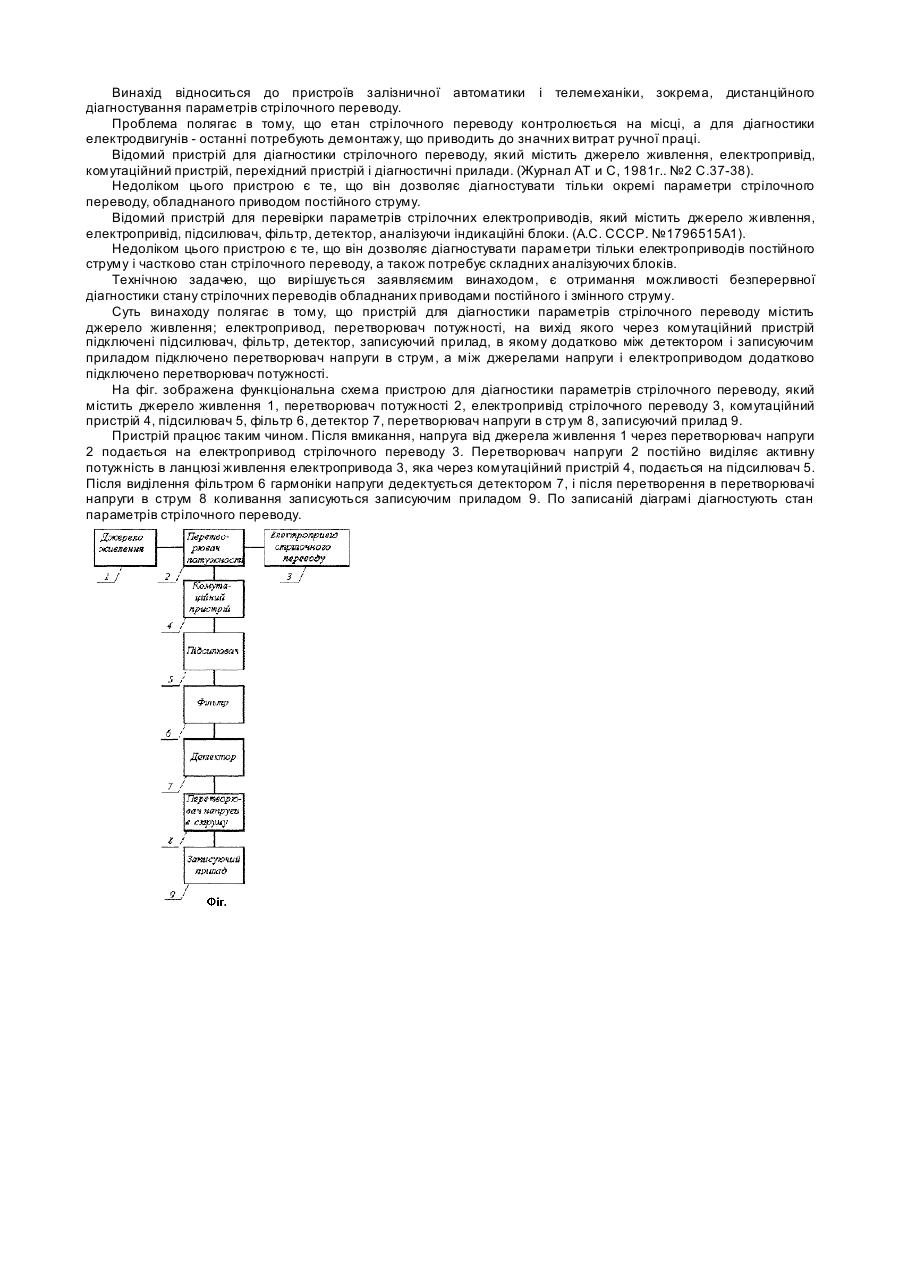
Пристрій для діагностики параметрів стрілочного переводу, який містить джерело живлення, електропривід, перетворювач потужності, на вихід якого через комутаційний пристрій підключені підсилювачі, фільтр, записуючий прилад, який відрізняється тим, що між детектором і записуючим приладом додатково підключено перетворювач напруги в струм, а між джерелом напруги і електроприводом стрілочного переводу - перетворювач потужності.
Спосіб підвищення безаварійного проїзду стрілочного переводу

Номер патенту: 18615
Опубліковано: 15.11.2006
Автори: Парфьонов Володимир Іванович, Луцко Вячеслав Петрович
МПК: B61L 5/00
Мітки: підвищення, стрілочного, переводу, безаварійного, проїзду, спосіб
Формула / Реферат:
Спосіб підвищення безаварійного проїзду стрілочного переводу, при якому постійно контролюють лінійні зміни номінальних розмірів ширини колії в районі стрілочного переводу, відстань між гостряком та рамною рейкою, який відрізняється тим, що додатково контролюють зміну профілю поверхні кочення коліс залізничних вагонів і потяга і при наявності відхилення від допустимих розмірів вмикають світлову сигналізацію, розміщену в кабіні локомотива або...
Попередній патент: Пристрій обробки радіолокаційної інформації
Наступний патент: Самопідйомна опалубка
Випадковий патент: Спосіб оцукрення сусла у виробництві спирту