Пристрій обробки радіолокаційної інформації
Номер патенту: 109158
Опубліковано: 10.08.2016
Автори: Меленті Євген Олександрович, Квіткін Костянтин Петрович, Буяло Олексій Васильович, Гончарук Андрій Вікторович, Челпанов Артем Володимирович, Булай Андрій Миколайович, Рибалка Григорій Валерійович
Формула / Реферат
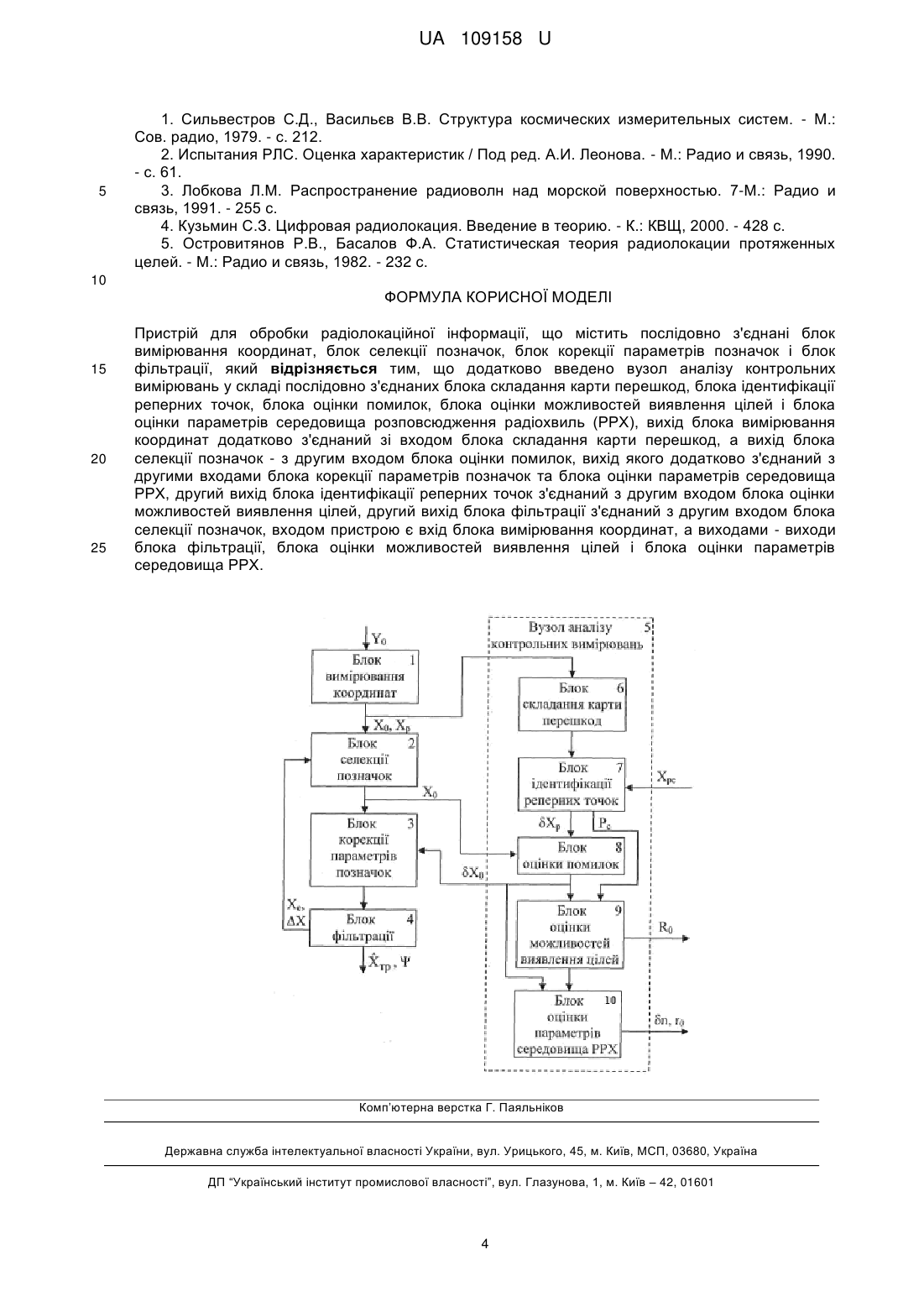
Пристрій для обробки радіолокаційної інформації, що містить послідовно з'єднані блок вимірювання координат, блок селекції позначок, блок корекції параметрів позначок і блок фільтрації, який відрізняється тим, що додатково введено вузол аналізу контрольних вимірювань у складі послідовно з'єднаних блока складання карти перешкод, блока ідентифікації реперних точок, блока оцінки помилок, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища розповсюдження радіохвиль (РРХ), вихід блока вимірювання координат додатково з'єднаний зі входом блока складання карти перешкод, а вихід блока селекції позначок - з другим входом блока оцінки помилок, вихід якого додатково з'єднаний з другими входами блока корекції параметрів позначок та блока оцінки параметрів середовища РРХ, другий вихід блока ідентифікації реперних точок з'єднаний з другим входом блока оцінки можливостей виявлення цілей, другий вихід блока фільтрації з'єднаний з другим входом блока селекції позначок, входом пристрою є вхід блока вимірювання координат, а виходами - виходи блока фільтрації, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища РРХ.
Текст
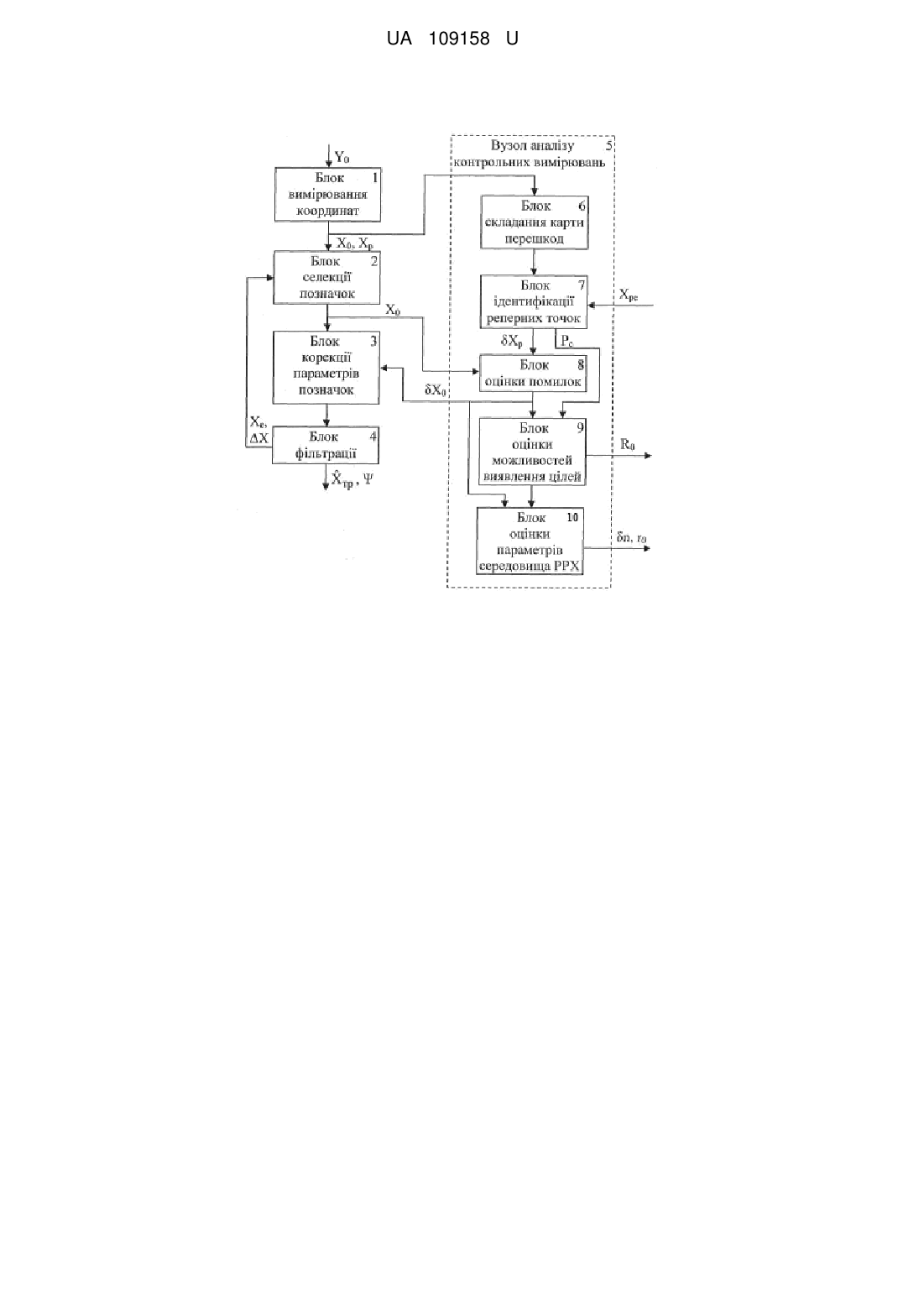
Реферат: Пристрій для обробки радіолокаційної інформації містить послідовно з'єднані блок вимірювання координат, блок селекції позначок, блок корекції параметрів позначок і блок фільтрації. Додатково пристрій має вузол аналізу контрольних вимірювань у складі послідовно з'єднаних блока складання карти перешкод, блока ідентифікації реперних точок, блока оцінки помилок, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища розповсюдження радіохвиль (РРХ). Вихід блока вимірювання координат додатково з'єднаний зі входом блока складання карти перешкод. Вихід блока селекції позначок з'єднаний з другим входом блока оцінки помилок, вихід якого додатково з'єднаний з другими входами блока корекції параметрів позначок та блока оцінки параметрів середовища РРХ. Другий вихід блока ідентифікації реперних точок з'єднаний з другим входом блока оцінки можливостей виявлення цілей. Другий вихід блока фільтрації з'єднаний з другим входом блока селекції позначок. Входом пристрою є вхід блока вимірювання координат, а виходами - виходи блока фільтрації, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища РРХ. UA 109158 U (12) UA 109158 U UA 109158 U 5 10 15 20 25 30 35 40 45 50 55 60 Запропонована корисна модель належить до галузі радіолокації і може бути використана для визначення параметрів траєкторії цілей в умовах значної рефракції радіохвиль. Відома вимірювальна система з контролем точності і корекцією помилок вимірювань [1], яка містить блок вимірювання, блок контролю з використанням еталонних сигналів і блок корекції вимірюваних параметрів. Недоліком вимірювальної системи з контролем точності і корекцією помилок вимірювань є обмежена можливість корекції, а саме корегуються тільки інструментальні помилки вимірювальної системи. Найбільш близьким до запропонованого технічним рішенням, вибраним як прототип, є пристрій обробки радіолокаційної інформації [2], який містить послідовно з'єднані блок вимірювання координат, блок селекції позначок, блок розрахунку помилок, блок корекції параметрів позначок і блок фільтрації. Недоліками пристрою-прототипу є складність створення еталонних об'єктів для радіолокаційних систем та тривалий час між контрольними вимірами з відповідним старінням контрольної інформації, зокрема, в умовах зміни параметрів середовища розповсюдження радіохвиль (РРХ). Це приводить до недостатньо повної компенсації помилок вимірювань координат при супроводженні цілей. В основу корисної моделі поставлена задача створити пристрій для обробки радіолокаційної інформації, в якому введення нових вузлів і блоків, а саме вузла аналізу контрольних вимірювань, дозволить, в умовах значної рефракції радіохвиль, за відбиттями від місцевих предметів з відомими координатами (від реперних точок) отримати дані про помилки вимірювання координат і скомпенсувати ці помилки в процесі супроводження цілей. Поставлена задача вирішується за рахунок того, що в пристрій-прототип, який містить послідовно з'єднані блок вимірювання координат, блок селекції позначок, блок корекції параметрів позначок і блок фільтрації, додатково введено вузол аналізу контрольних вимірювань у складі послідовно з'єднаних блока складання карти перешкод, блока ідентифікації реперних точок, блока оцінки помилок, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища РРХ. Вихід блока вимірювання координат додатково з'єднаний зі входом блока складання карти перешкод, а вихід блока селекції позначок - з другим входом блока оцінки помилок, вихід якого додатково з'єднаний з другими входами блока корекції параметрів позначок та блока оцінки параметрів середовища РРХ. Другий вихід блока ідентифікації реперних точок з'єднаний з другим входом блока оцінки можливостей виявлення цілей, другий вихід блока фільтрації з'єднаний з другим входом блока селекції позначок. Входом пристрою є вхід блока вимірювання координат, а виходами - виходи блока фільтрації, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища РРХ. Технічний результат, який може бути отриманий при здійсненні корисної моделі, полягає у тому, що в умовах рефракції радіохвиль, за рахунок луна-сигналів від місцевих предметів з відомими координатами (від реперних точок) з'являється можливість їх використання в якості еталонних, для визначення помилок вимірювання координат цілей, компенсації цих помилок, і, відповідно, підвищення точності оцінок параметрів траєкторії цілей.На фіг. 1 приведена структурна схема запропонованого пристрою. Пристрій обробки радіолокаційної інформації містить послідовно з'єднані блок вимірювання координат 1, блок селекції позначок 2, блок корекції параметрів позначок 3 і блок фільтрації 4, також вузол аналізу контрольних вимірювань 5 у складі послідовно з'єднаних блока складання карти перешкод 6, блока ідентифікації реперних точок 7, блока оцінки помилок 8, блока оцінки можливостей виявлення цілей 9 і блока оцінки параметрів середовища РРХ 10. Вихід блока вимірювання координат додатково з'єднаний зі входом блока складання карти перешкод, а вихід блока селекції позначок - з другим входом блока оцінки помилок, вихід якого додатково з'єднаний з другими входами блока корекції параметрів позначок та блока оцінки параметрів середовища РРХ. Другий вихід блока ідентифікації реперних точок з'єднаний з другим входом блока оцінки можливостей виявлення цілей, другий вихід блока фільтрації з'єднаний з другим входом блока селекції позначок. Входом пристрою є вхід блока вимірювання координат а виходами - виходи блока фільтрації, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища РРХ. Робота пропонованого пристрою полягає у наступному. На вхід пристрою надходять луна-сигнали від цілей Y0, за якими в блоці 1 здійснюються вимірювання значень вектора координат цілей Х0 (параметрів позначок). Отримані позначки від супроводжуваних цілей селектуються в блоці 2, та після корекції вимірювань в блоці 3 1 UA 109158 U фільтруються в блоці 4 із визначенням вектору параметрів траєкторії 5 10 15 20 25 ˆ X тр і кореляційної матриці помилок (КМП) . Селекція позначок здійснюється з використанням стробів супроводження Х та екстрапольованих значень параметрів траєкторії Х е, які надходять з блока фільтрації. В умовах рефракції радіохвиль, зокрема, для РЛС приморського базування, коли створюється тропосферний (приповерхневий) хвилевод, значна частина енергії сигналу захоплюється цим хвилеводом і тому надходять луна-сигнали від маловисотних цілей і місцевих предметів (зокрема, поверхнево-розподілених об'єктів протилежного берегу моря), які знаходяться за лінією горизонту [3]. В цих умовах з'являється можливість загоризонтного виявлення цілей, однак в той самий час підвищуються помилки вимірювань координат за рахунок впливу середовища РРХ. Відбиття від місцевих предметів з відомими координатами та конфігурацією Yp можливо використовувати, як еталонні для визначення помилок вимірювань координат цілей та оцінки можливостей загоризонтного виявлення цілей і параметрів середовища РРХ. Для цього в блоці 6 складається карта пасивних перешкод - координат місцевих предметів, так званих блискучих точок. Координати місцевих предметів, що отримані за параметрами блискучих точок (Х р) порівнюються в блоці 7 з координатами відомих об'єктів-реперів (Хре) для їх ідентифікації. Після ідентифікації визначаються розбіжності між виміряними Х р і дійсними (еталонними) значеннями вектору координат об'єктів (реперних точок) Х ре: x j x pj x pej , (1) де: х = R, , (координати дальності, азимуту і кута місця); j - номер циклу огляду (j=1, 2, …, N). У загальному випадку кутові координати супроводжуваної цілі (зокрема, азимут), не співпадають з координатами реперної точки, тому розраховуються значення помилок для напрямку на ціль (для відповідної траси проходження радіохвиль). При цьому використовуються значення помилок, визначених для найближчих реперних точок, наприклад, при ваговій обробці за азимутальною координатою: 2 1 1 2 , (2) 2 1 де: 1 , 2 - кутові відстані цілі від найближчих реперних точок 1 і 2; 30 1 1 ц ; 2 2 ц ; 1 ц 2 ; 35 1, 2 - азимутальні напрямки на реперні точки; ц - азимут цілі. Оцінки помилок вимірювання координат надходять на блок 3, де здійснюється корекція параметрів позначок (опорних точок) супроводжуваних цілей. В блоці 4 позначки фільтруються з визначенням вектору параметрів траєкторії цілі 40 45 ˆ X тр і елементів КМП , відповідно із співвідношеннями для фільтра Калмана [4]. Екстрапольовані значення параметрів траєкторії та строби супроводження надходять до блока 2, де використовуються для селекції позначок від супроводжуваної цілі. Параметри луна-сигналів від реперних точок, зокрема, їх потужність Рс, використовуються для оцінки можливостей загоризонтного виявлення маловисотних цілей в умовах існування тропосферного хвилеводу на трасі розповсюдження радіохвиль [5]: Rц Рпер ц GK тх ; (3) Рмін 4 де: Р пер - потужність передавача РЛС; ц - ефективна поверхня розсіювання (ЕПР) цілі; Р мін - порогова чутливість приймача; 2 UA 109158 U G - коефіцієнт підсилення антени РЛС; - довжина хвилі; K тх - комплексний показник ступеню захоплення енергії сигналу тропосферним хвилеводом, K тх 5 Pc ; P0 Pc - виміряне значення потужності луна-сигналів від реперної точки; P0 - розрахункове значення потужності сигналу без урахування втрат: P0 Pпер G2 p 2 2 163Rp , (4) де: Rp - відстань до реперної точки; p - ЕПР реперної точки, p S p ; 10 S p - площина реперної точки, яка опромінюється; 2 - відносна ЕПР одного м площини поверхні реперної точки. В залежності від виду 15 20 (структури) поверхні = 0,01….0,05 [4]. Статистичні характеристики помилок вимірювань цілей в умовах існування тропосферного хвилеводу можливо використовувати для оцінки параметрів середовища РРХ [3], зокрема, кореляційних характеристик - коефіцієнтів повздовжньої і поперечної кореляції фазових і амплітудних спотворень сигналів, параметрів тропосферного хвилеводу. Аналіз статистичних характеристик параметрів сигналів РЛС на приморському напрямку показує залежність флуктуацій фази () і амплітуди (а) сигналів від параметрів середовища РРХ [3]: 2(a ) де: K ( a ) n 2Lr0 2 , (5) 2(a) - дисперсія фази (амплітуди); K ( a ) - постійний коефіцієнт; n - значення флуктуації коефіцієнту заломлення n; r0 - радіус кореляції флуктуацій n; 25 L - довжина траєкторії розповсюдження радіохвиль. Для коефіцієнтів поперечної і повздовжньої кореляції сигналів виконується залежність: K () 30 35 40 2 exp 2 , (6) r 0 де: - відстань між точками в площині розкриву антени РЛС (поперечна кореляція) або в напрямку РРХ (повздовжня кореляція). На основі розрахунків для дисперсії і кореляційних характеристик помилок вимірювань параметрів луна-сигналів (зокрема, фази і амплітуди), отриманих від реперних точок, оцінюються статистичні характеристики середовища РРХ (наприклад, для коефіцієнту заломлення n), які впливають на можливості виявлення і сталого супроводження цілей. До вихідної інформації пристрою відносяться: оцінки параметрів траєкторії супроводжуваної цілі ˆ X тр та їх точнісні характеристики (значення елементів кореляційної матриці помилок ); можливості загоризонтного виявлення заданих типів маловисотних повітряних цілей (очікувані дальності виявлення Ro в існуючих умовах - стану середовища РРХ); параметри середовища РРХ, які впливають на можливості отримання і точнісні характеристики радіолокаційної інформації. Послідовність включення в роботу окремих блоків пристрою та їх взаємодія визначаються сіткою керуючих і синхронізуючих імпульсів, прив'язаних до сітки частот синхронізатору РЛС (вузол синхронізації і керування на схемі пристрою не показаний). Джерела інформації: 3 UA 109158 U 5 1. Сильвестров С.Д., Васильєв В.В. Структура космических измерительных систем. - М.: Сов. радио, 1979. - с. 212. 2. Испытания РЛС. Оценка характеристик / Под ред. А.И. Леонова. - М.: Радио и связь, 1990. - с. 61. 3. Лобкова Л.М. Распространение радиоволн над морской поверхностью. 7-М.: Радио и связь, 1991. - 255 с. 4. Кузьмин С.З. Цифровая радиолокация. Введение в теорию. - К.: КВЩ, 2000. - 428 с. 5. Островитянов Р.В., Басалов Ф.А. Статистическая теория радиолокации протяженных целей. - М.: Радио и связь, 1982. - 232 с. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 25 Пристрій для обробки радіолокаційної інформації, що містить послідовно з'єднані блок вимірювання координат, блок селекції позначок, блок корекції параметрів позначок і блок фільтрації, який відрізняється тим, що додатково введено вузол аналізу контрольних вимірювань у складі послідовно з'єднаних блока складання карти перешкод, блока ідентифікації реперних точок, блока оцінки помилок, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища розповсюдження радіохвиль (РРХ), вихід блока вимірювання координат додатково з'єднаний зі входом блока складання карти перешкод, а вихід блока селекції позначок - з другим входом блока оцінки помилок, вихід якого додатково з'єднаний з другими входами блока корекції параметрів позначок та блока оцінки параметрів середовища РРХ, другий вихід блока ідентифікації реперних точок з'єднаний з другим входом блока оцінки можливостей виявлення цілей, другий вихід блока фільтрації з'єднаний з другим входом блока селекції позначок, входом пристрою є вхід блока вимірювання координат, а виходами - виходи блока фільтрації, блока оцінки можливостей виявлення цілей і блока оцінки параметрів середовища РРХ. Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 4
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01S 13/52
Мітки: радіолокаційної, обробки, пристрій, інформації
Код посилання
<a href="https://ua.patents.su/6-109158-pristrijj-obrobki-radiolokacijjno-informaci.html" target="_blank" rel="follow" title="База патентів України">Пристрій обробки радіолокаційної інформації</a>
Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 44415
Опубліковано: 15.12.2003
Автори: Траїлін Вячеслав Федорович, Немчин Олександр Федорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мокеєв Юрій Геннадійович
МПК: G01S 7/28
Мітки: інформації, пристрій, радіолокаційної, обробки, сигналів
Формула / Реферат:
Пристрій обробки сигналів радіолокаційної інформації, що містить схему затримки з паралельно з'єднаних блоків пам'яті, перший та другий суматори та обчислювальний блок, який відрізняється тим, що схема затримки виконана з 2N-1 виходами, пристрій додатково містить блок синхронізації, з’єднаний зі схемою затримки, блоком обробки та з’єднаними між собою блоком накопичення і блоком обнулення, перший елемент НI, першу схему І, другий елемент НI,...
Пристрій критерійної обробки радіолокаційної інформації
Номер патенту: 37866
Опубліковано: 15.05.2003
Автори: КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, МАЙ ІГОР ДМИТРОВИЧ, Мирошниченко Михайло Іванович, Немчин Олександр Федорович, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Падалко Віктор Григорович, Мокеєв Юрій Геннадійович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ
МПК: G01S 13/526, G01S 7/40, G01S 13/00
Мітки: критерійної, пристрій, обробки, інформації, радіолокаційної
Формула / Реферат:
Пристрій критерійної обробки радіолокаційної інформації, який містить m блоків пам'яті та вирішувальний блок, який відрізняється тим, що він містить блок синхронізації з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом блока синхронізації, блок обробки, ланцюжок з m послідовно з'єднаних блоків пам'яті з об'єднаними між собою тактовими входами, підключеними до четвертого виходу блока синхронізації, вирішувальний блок...
Пристрій обробки сигналів радіолокаційної інформації
Номер патенту: 37865
Опубліковано: 15.05.2003
Автори: МАЙ ІГОР ДМИТРОВИЧ, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Немчин Олександр Федорович, Мирошниченко Михайло Іванович, Мокеєв Юрій Геннадійович, КУКОЛЬНИЦЬКИЙ АНАТОЛІЙ ПИЛИПОВИЧ, ТОМАЧИНСЬКИЙ МИКОЛА ТИМОФІЙОВИЧ, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ
МПК: G01S 13/00, G01S 13/42, G01S 13/526
Мітки: інформації, сигналів, радіолокаційної, пристрій, обробки
Формула / Реферат:
1. Пристрій обробки сигналів радіолокаційної інформації, який містить блок накопичення та вирішувавльний блок, який відрізняється тим, що пристрій містить синхронізатор з чотирма виходами, блок обнулення, вхід якого з'єднаний з першим виходом синхронізатора, інформаційний вхід блока накопичення є входом пристрою, вхід обнулення з'єднаний з виходом блока обнулення, а тактовий вхід з'єднаний з другим виходом синхронізатора, блок обробки,...
Пристрій обробки радіолокаційної інформації
Номер патенту: 37867
Опубліковано: 15.05.2003
Автори: Лаврентьєв Володимир Миколайович, Немчин Олександр Федорович, КОПНОВ МИХАЙЛО ОЛЕКСАНДРОВИЧ, Мокеєв Юрій Генадійович, Каспирович Олександр Геннадійович, Падалко Віктор Григорович, КОНОНОВИЧ ВІКТОР ЯКОВИЧ, Мирошниченко Михайло Іванович
МПК: G01S 7/40, G01S 13/526, G01S 13/00
Мітки: інформації, обробки, радіолокаційної, пристрій
Формула / Реферат:
1. Пристрій обробки радіолокаційної інформації, який містить q доплерівських фільтрових каналів з об'єднаними входами, що є входом пристрою, кожен з каналів включає доплерівський фільтр, вхід якого є входом доплерівського фільтрового каналу, лінію затримки з відводами, послідовно з’єднані схему порівняння і регістр затримки, порогову схему, вентильну схему, а також q-входову схему АБО і бінарний накопичувач, вихід якого є виходом пристрою,...
Система керування функціональними режимами радіолокаційної станції
Номер патенту: 30978
Опубліковано: 25.03.2008
Автори: Карлов Володимир Дмитрович, Шматков Сергій Ігорович, Челпанов Артем Володимирович, Вовк Олександр Іванович
МПК: G01S 13/52
Мітки: радіолокаційної, режимами, система, станції, керування, функціональними
Формула / Реферат:
Система керування функціональними режимами радіолокаційної станції (РЛС), що містить вузол обробки інформації, вузол керування ресурсами РЛС та вузол керування режимом супроводу у складі послідовно включених блока класифікації, блока розподілу заявок на супровід цілей і блока оцінки потрібної енергії, яка відрізняється тим, що додатково введені: послідовно з'єднані блок оцінки інтенсивності потоку цілей і блок групування цілей, послідовно...
Попередній патент: Спосіб зйомки та трансляції інтерактивного відео об’ємного формату
Наступний патент: Безредукторний електропривід стрілочного переводу шпального типу
Випадковий патент: Спосіб одержання розчину монохромату натрію