Ролик прокатного стану
Номер патенту: 110439
Опубліковано: 10.10.2016
Автори: Волошин Олексій Іванович, Єлецьких Володимир Іванович, Хохотва Ігор Іванович, Бобух Іван Олексійович

Формула / Реферат
Ролик прокатного стану, що містить вал із цапфами й бочку, встановлену на валу, який відрізняється тим, що він обладнаний бочкуватими шпинками, встановленими в торцях бочки, які з'єднують в тангенціальному напрямку вал й бочку, крім того бочка встановлена на валу із зазором, а поверхня вала на частині між бочкуватими шпинками виконана увігнутою з радіусом кривизни, що визначається за формулою
R=L2/8D,
де R - радіус кривизни поверхні вала між бочкуватими шпинками;
L - відстань між бочкуватими шпинками;
D - зазор між бочкою й валом по середині ролика.
Текст
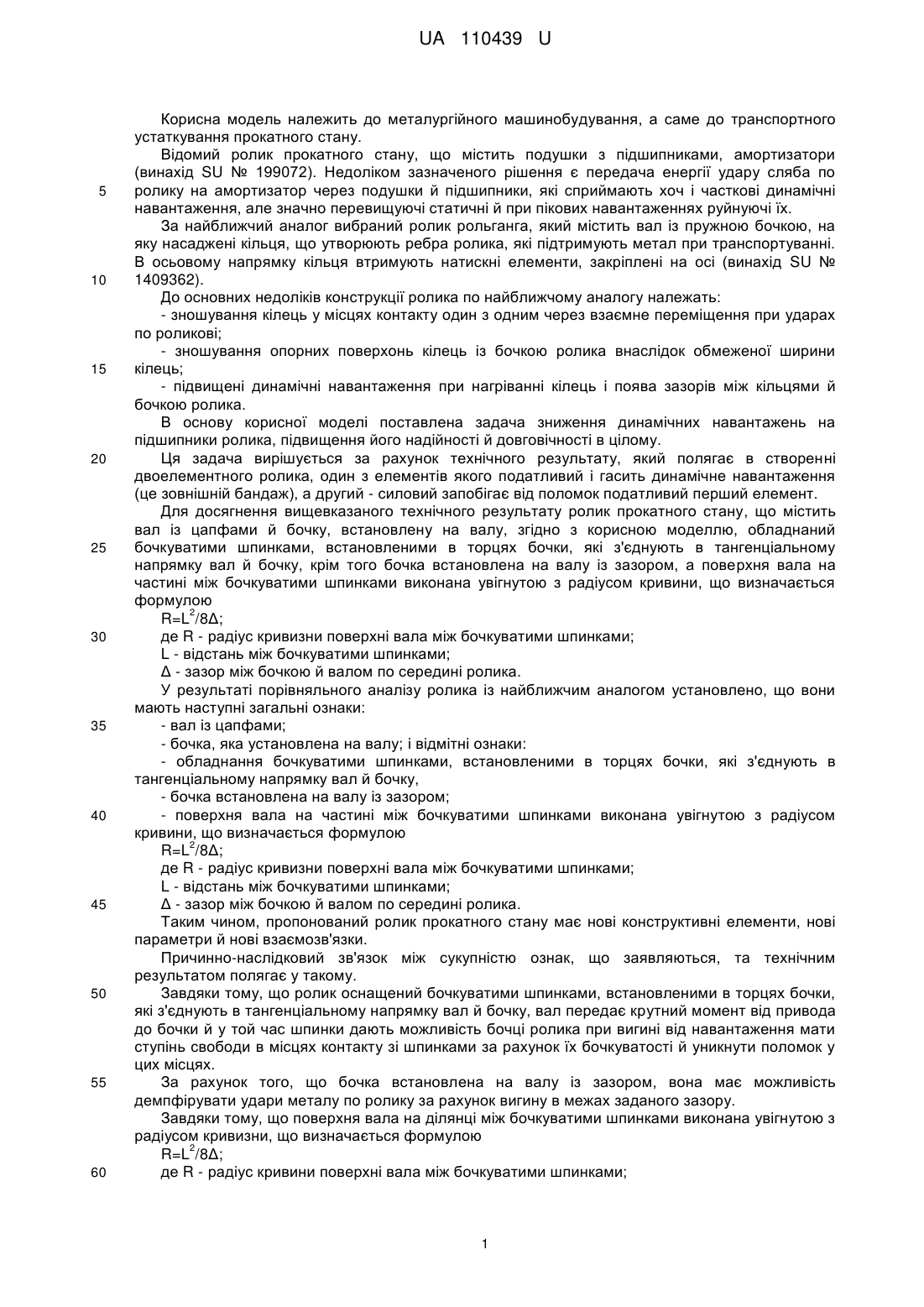
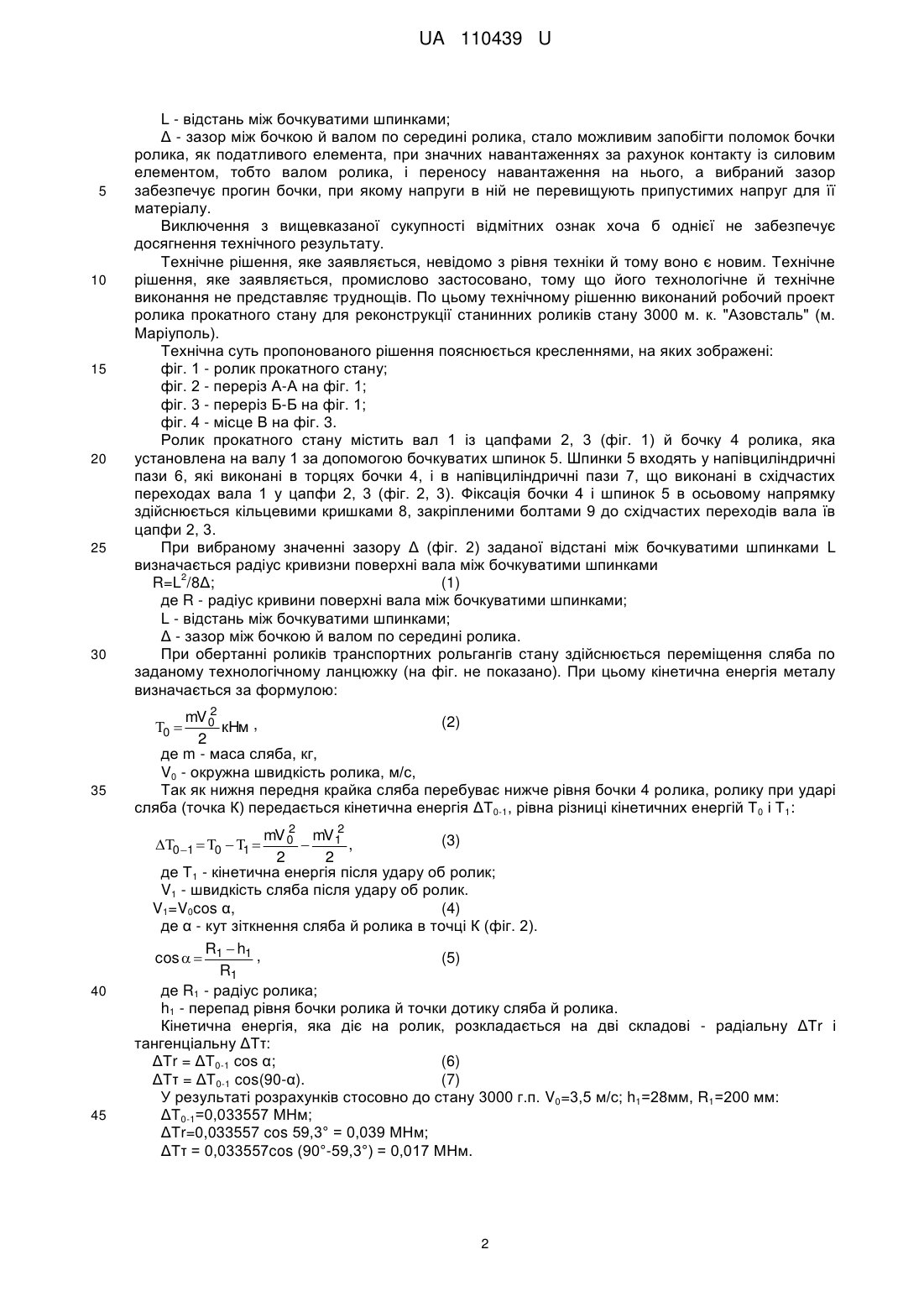
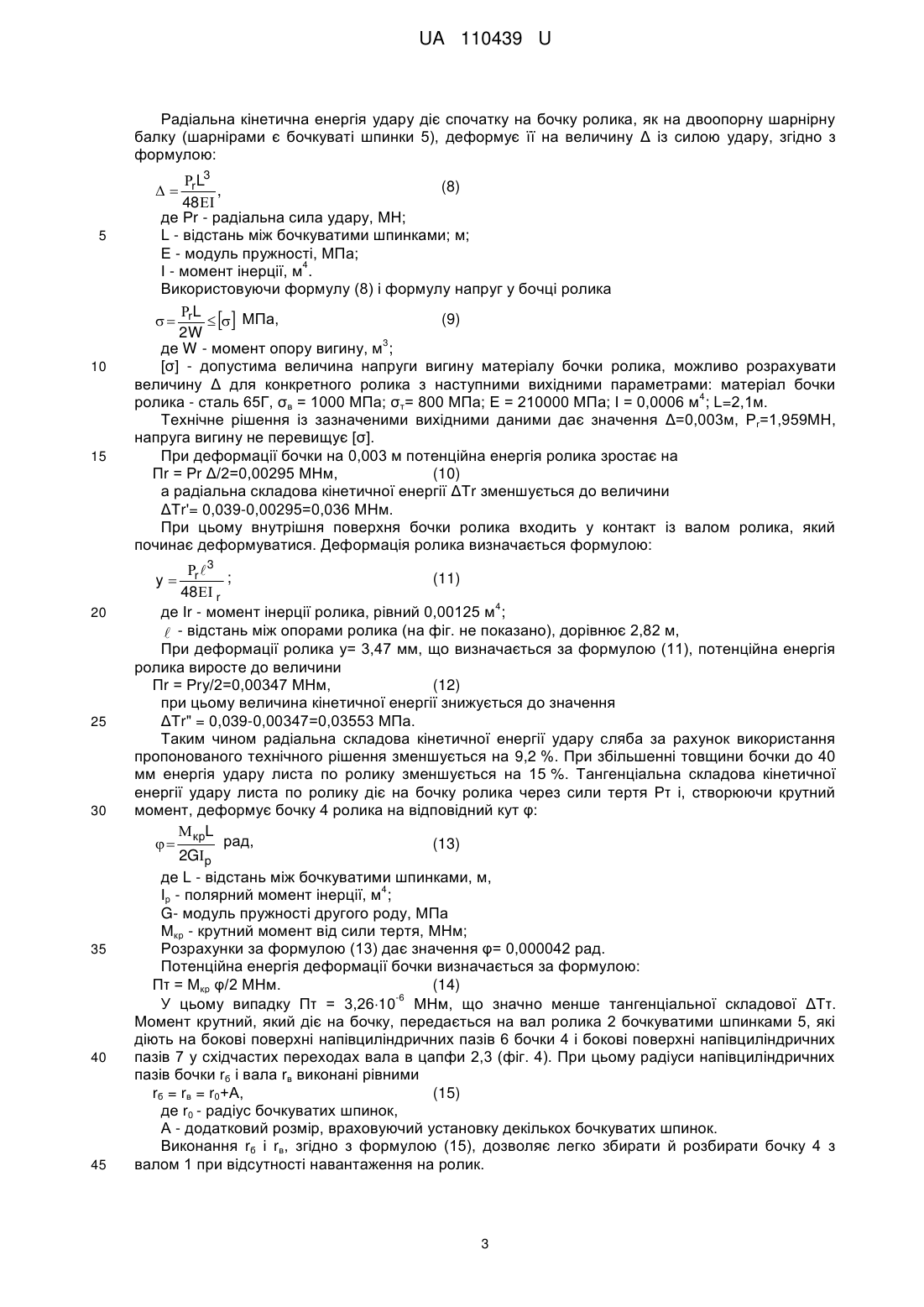
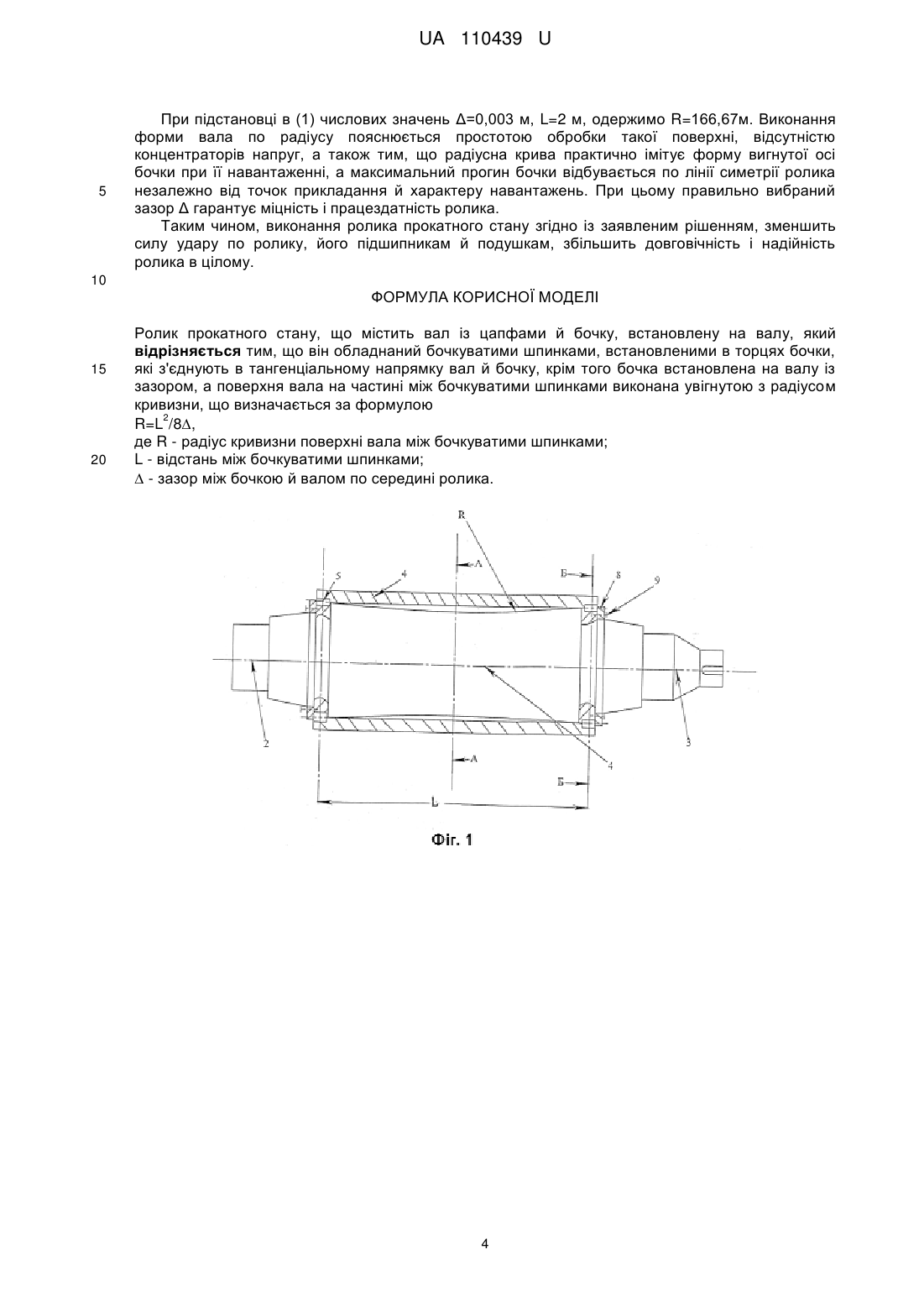
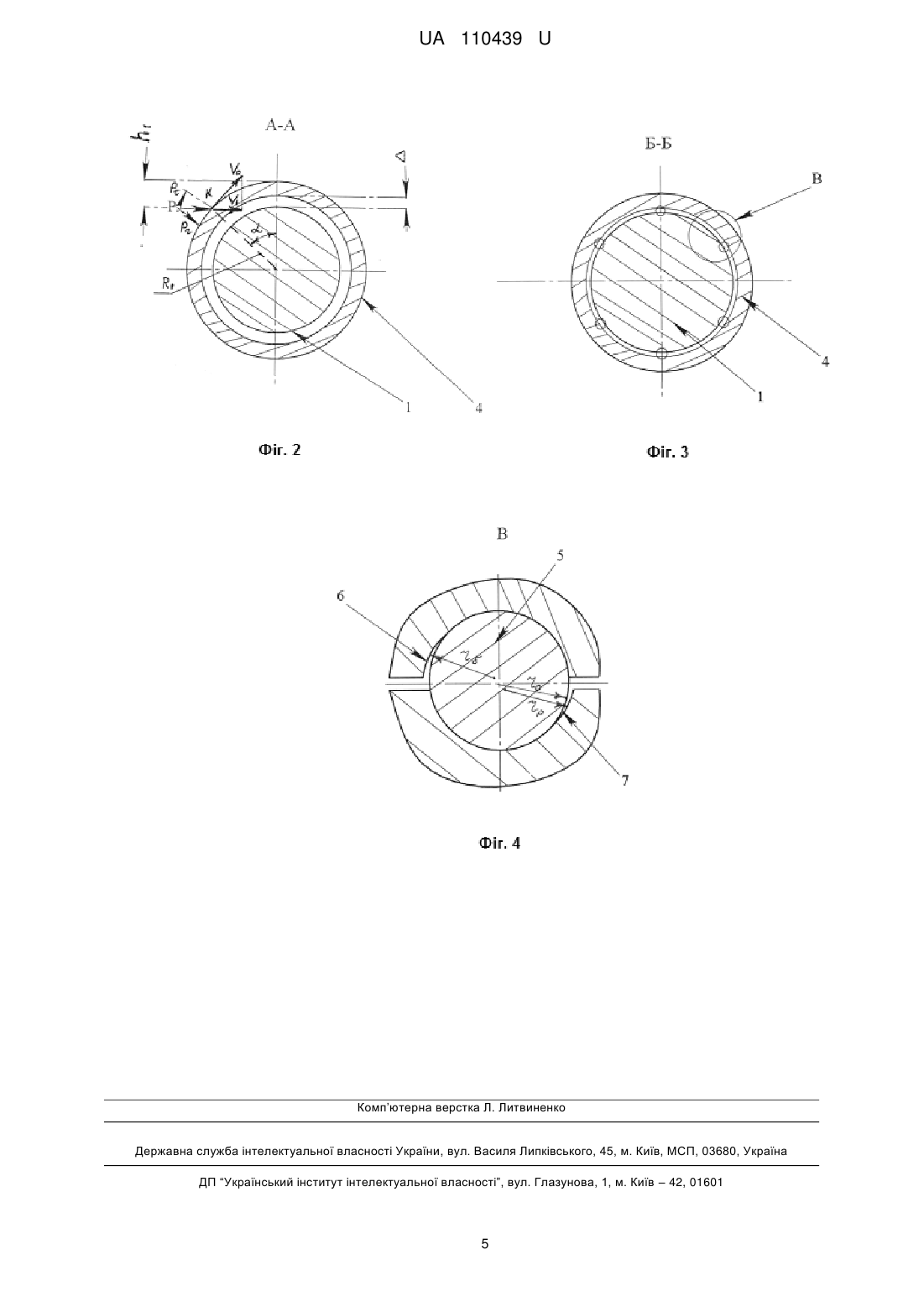
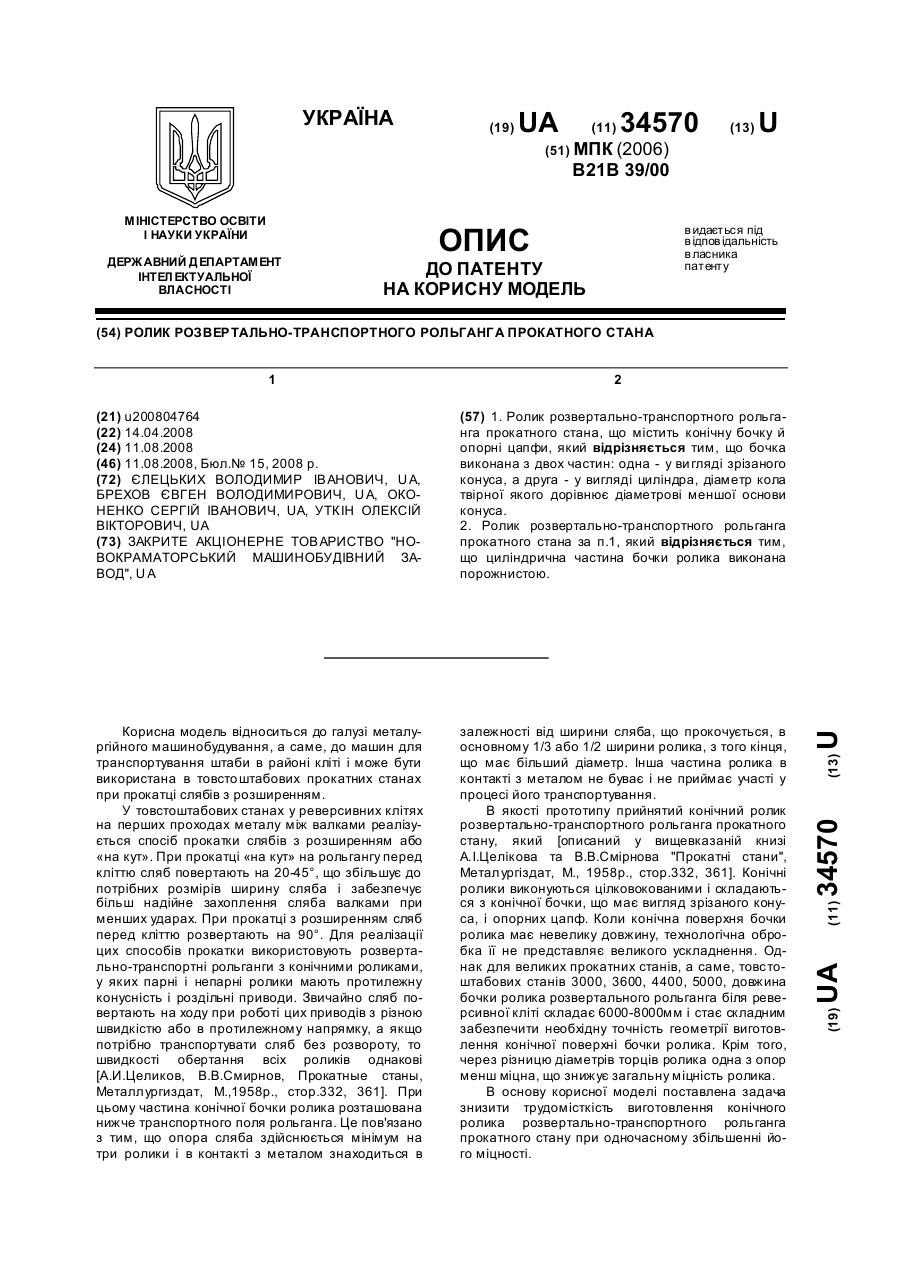
Реферат: Ролик прокатного стану містить вал із цапфами й бочку, встановлену на валу. Він додатково обладнаний бочкуватими шпинками, встановленими в торцях бочки, які з'єднують в тангенціальному напрямку вал й бочку. Крім цього бочка встановлена на валу із зазором, а поверхня вала на частині між бочкуватими шпинками виконана увігнутою з радіусом кривизни, що визначається за формулою. UA 110439 U (54) РОЛИК ПРОКАТНОГО СТАНУ UA 110439 U UA 110439 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до металургійного машинобудування, а саме до транспортного устаткування прокатного стану. Відомий ролик прокатного стану, що містить подушки з підшипниками, амортизатори (винахід SU № 199072). Недоліком зазначеного рішення є передача енергії удару сляба по ролику на амортизатор через подушки й підшипники, які сприймають хоч і часткові динамічні навантаження, але значно перевищуючі статичні й при пікових навантаженнях руйнуючі їх. За найближчий аналог вибраний ролик рольганга, який містить вал із пружною бочкою, на яку насаджені кільця, що утворюють ребра ролика, які підтримують метал при транспортуванні. В осьовому напрямку кільця втримують натискні елементи, закріплені на осі (винахід SU № 1409362). До основних недоліків конструкції ролика по найближчому аналогу належать: - зношування кілець у місцях контакту один з одним через взаємне переміщення при ударах по роликові; - зношування опорних поверхонь кілець із бочкою ролика внаслідок обмеженої ширини кілець; - підвищені динамічні навантаження при нагріванні кілець і поява зазорів між кільцями й бочкою ролика. В основу корисної моделі поставлена задача зниження динамічних навантажень на підшипники ролика, підвищення його надійності й довговічності в цілому. Ця задача вирішується за рахунок технічного результату, який полягає в створенні двоелементного ролика, один з елементів якого податливий і гасить динамічне навантаження (це зовнішній бандаж), а другий - силовий запобігає від поломок податливий перший елемент. Для досягнення вищевказаного технічного результату ролик прокатного стану, що містить вал із цапфами й бочку, встановлену на валу, згідно з корисною моделлю, обладнаний бочкуватими шпинками, встановленими в торцях бочки, які з'єднують в тангенціальному напрямку вал й бочку, крім того бочка встановлена на валу із зазором, а поверхня вала на частині між бочкуватими шпинками виконана увігнутою з радіусом кривини, що визначається формулою 2 R=L /8Δ; де R - радіус кривизни поверхні вала між бочкуватими шпинками; L - відстань між бочкуватими шпинками; Δ - зазор між бочкою й валом по середині ролика. У результаті порівняльного аналізу ролика із найближчим аналогом установлено, що вони мають наступні загальні ознаки: - вал із цапфами; - бочка, яка установлена на валу; і відмітні ознаки: - обладнання бочкуватими шпинками, встановленими в торцях бочки, які з'єднують в тангенціальному напрямку вал й бочку, - бочка встановлена на валу із зазором; - поверхня вала на частині між бочкуватими шпинками виконана увігнутою з радіусом кривини, що визначається формулою 2 R=L /8Δ; де R - радіус кривизни поверхні вала між бочкуватими шпинками; L - відстань між бочкуватими шпинками; Δ - зазор між бочкою й валом по середині ролика. Таким чином, пропонований ролик прокатного стану має нові конструктивні елементи, нові параметри й нові взаємозв'язки. Причинно-наслідковий зв'язок між сукупністю ознак, що заявляються, та технічним результатом полягає у такому. Завдяки тому, що ролик оснащений бочкуватими шпинками, встановленими в торцях бочки, які з'єднують в тангенціальному напрямку вал й бочку, вал передає крутний момент від привода до бочки й у той час шпинки дають можливість бочці ролика при вигині від навантаження мати ступінь свободи в місцях контакту зі шпинками за рахунок їх бочкуватості й уникнути поломок у цих місцях. За рахунок того, що бочка встановлена на валу із зазором, вона має можливість демпфірувати удари металу по ролику за рахунок вигину в межах заданого зазору. Завдяки тому, що поверхня вала на ділянці між бочкуватими шпинками виконана увігнутою з радіусом кривизни, що визначається формулою 2 R=L /8Δ; де R - радіус кривини поверхні вала між бочкуватими шпинками; 1 UA 110439 U 5 10 15 20 25 30 L - відстань між бочкуватими шпинками; Δ - зазор між бочкою й валом по середині ролика, стало можливим запобігти поломок бочки ролика, як податливого елемента, при значних навантаженнях за рахунок контакту із силовим елементом, тобто валом ролика, і переносу навантаження на нього, а вибраний зазор забезпечує прогин бочки, при якому напруги в ній не перевищують припустимих напруг для її матеріалу. Виключення з вищевказаної сукупності відмітних ознак хоча б однієї не забезпечує досягнення технічного результату. Технічне рішення, яке заявляється, невідомо з рівня техніки й тому воно є новим. Технічне рішення, яке заявляється, промислово застосовано, тому що його технологічне й технічне виконання не представляє труднощів. По цьому технічному рішенню виконаний робочий проект ролика прокатного стану для реконструкції станинних роликів стану 3000 м. к. "Азовсталь" (м. Маріуполь). Технічна суть пропонованого рішення пояснюється кресленнями, на яких зображені: фіг. 1 - ролик прокатного стану; фіг. 2 - переріз А-А на фіг. 1; фіг. 3 - переріз Б-Б на фіг. 1; фіг. 4 - місце В на фіг. 3. Ролик прокатного стану містить вал 1 із цапфами 2, 3 (фіг. 1) й бочку 4 ролика, яка установлена на валу 1 за допомогою бочкуватих шпинок 5. Шпинки 5 входять у напівциліндричні пази 6, які виконані в торцях бочки 4, і в напівциліндричні пази 7, що виконані в східчастих переходах вала 1 у цапфи 2, 3 (фіг. 2, 3). Фіксація бочки 4 і шпинок 5 в осьовому напрямку здійснюється кільцевими кришками 8, закріпленими болтами 9 до східчастих переходів вала їв цапфи 2, 3. При вибраному значенні зазору Δ (фіг. 2) заданої відстані між бочкуватими шпинками L визначається радіус кривизни поверхні вала між бочкуватими шпинками 2 R=L /8Δ; (1) де R - радіус кривини поверхні вала між бочкуватими шпинками; L - відстань між бочкуватими шпинками; Δ - зазор між бочкою й валом по середині ролика. При обертанні роликів транспортних рольгангів стану здійснюється переміщення сляба по заданому технологічному ланцюжку (на фіг. не показано). При цьому кінетична енергія металу визначається за формулою: 2 mV 0 (2) кНм , 2 де m - маса сляба, кг, V0 - окружна швидкість ролика, м/с, Так як нижня передня крайка сляба перебуває нижче рівня бочки 4 ролика, ролику при ударі сляба (точка К) передається кінетична енергія ΔТ0-1, рівна різниці кінетичних енергій Т0 і Т1: 0 35 2 2 mV 0 mV1 (3) , 2 2 де Т1 - кінетична енергія після удару об ролик; V1 - швидкість сляба після удару об ролик. V1=V0cos α, (4) де α - кут зіткнення сляба й ролика в точці К (фіг. 2). R h (5) cos 1 1 , R1 де R1 - радіус ролика; h1 - перепад рівня бочки ролика й точки дотику сляба й ролика. Кінетична енергія, яка діє на ролик, розкладається на дві складові - радіальну ΔТr і тангенціальну ΔТτ: ΔТr = ΔТ0-1 cos α; (6) ΔТτ = ΔТ0-1 cos(90-α). (7) У результаті розрахунків стосовно до стану 3000 г.п. V0=3,5 м/с; h1=28мм, R1=200 мм: ΔТ0-1=0,033557 МНм; ΔТr=0,033557 cos 59,3° = 0,039 МНм; ΔТτ = 0,033557cos (90°-59,3°) = 0,017 МНм. 0 1 0 1 40 45 2 UA 110439 U Радіальна кінетична енергія удару діє спочатку на бочку ролика, як на двоопорну шарнірну балку (шарнірами є бочкуваті шпинки 5), деформує її на величину Δ із силою удару, згідно з формулою: 5 10 15 L3 (8) r , 48 де Рr - радіальна сила удару, МН; L - відстань між бочкуватими шпинками; м; Е - модуль пружності, МПа; 4 Ι - момент інерції, м . Використовуючи формулу (8) і формулу напруг у бочці ролика L (9) r МПа, 2W 3 де W - момент опору вигину, м ; [σ] - допустима величина напруги вигину матеріалу бочки ролика, можливо розрахувати величину Δ для конкретного ролика з наступними вихідними параметрами: матеріал бочки 4 ролика - сталь 65Г, σв = 1000 МПа; σт= 800 МПа; Е = 210000 МПа; Ι = 0,0006 м ; L=2,1м. Технічне рішення із зазначеними вихідними даними дає значення Δ=0,003м, Рr=1,959МН, напруга вигину не перевищує [σ]. При деформації бочки на 0,003 м потенційна енергія ролика зростає на Пr = Рr Δ/2=0,00295 МНм, (10) а радіальна складова кінетичної енергії ΔТr зменшується до величини ΔТr'= 0,039-0,00295=0,036 МНм. При цьому внутрішня поверхня бочки ролика входить у контакт із валом ролика, який починає деформуватися. Деформація ролика визначається формулою: r 3 ; (11) 48 r 4 де Ιr - момент інерції ролика, рівний 0,00125 м ; - відстань між опорами ролика (на фіг. не показано), дорівнює 2,82 м, При деформації ролика у= 3,47 мм, що визначається за формулою (11), потенційна енергія ролика виросте до величини Пr = Рrу/2=0,00347 МНм, (12) при цьому величина кінетичної енергії знижується до значення ΔТr" = 0,039-0,00347=0,03553 МПа. Таким чином радіальна складова кінетичної енергії удару сляба за рахунок використання пропонованого технічного рішення зменшується на 9,2 %. При збільшенні товщини бочки до 40 мм енергія удару листа по ролику зменшується на 15 %. Тангенціальна складова кінетичної енергії удару листа по ролику діє на бочку ролика через сили тертя Рτ і, створюючи крутний момент, деформує бочку 4 ролика на відповідний кут φ: крL рад, (13) 2Gp де L - відстань між бочкуватими шпинками, м, 4 Ιр - полярниймомент інерції, м ; G- модуль пружності другого роду, МПа Мкр - крутний момент від сили тертя, МНм; Розрахунки за формулою (13) дає значення φ= 0,000042 рад. Потенційна енергія деформації бочки визначається за формулою: Пτ = Мкр φ/2 МНм. (14) -6 У цьому випадку Пτ = 3,2610 МНм, що значно менше тангенціальної складової ΔТτ. Момент крутний, який діє на бочку, передається на вал ролика 2 бочкуватими шпинками 5, які діють на бокові поверхні напівциліндричних пазів 6 бочки 4 і бокові поверхні напівциліндричних пазів 7 у східчастих переходах вала в цапфи 2,3 (фіг. 4). При цьому радіуси напівциліндричних пазів бочки rб і вала rв виконані рівними rб = rв = r0+А, (15) де r0 - радіус бочкуватих шпинок, А - додатковий розмір, враховуючий установку декількох бочкуватих шпинок. Виконання rб і rв, згідно з формулою (15), дозволяє легко збирати й розбирати бочку 4 з валом 1 при відсутності навантаження на ролик. y 20 25 30 35 40 45 3 UA 110439 U 5 При підстановці в (1) числових значень Δ=0,003 м, L=2 м, одержимо R=166,67м. Виконання форми вала по радіусу пояснюється простотою обробки такої поверхні, відсутністю концентраторів напруг, а також тим, що радіусна крива практично імітує форму вигнутої осі бочки при її навантаженні, а максимальний прогин бочки відбувається по лінії симетрії ролика незалежно від точок прикладання й характеру навантажень. При цьому правильно вибраний зазор Δ гарантує міцність і працездатність ролика. Таким чином, виконання ролика прокатного стану згідно із заявленим рішенням, зменшить силу удару по ролику, його підшипникам й подушкам, збільшить довговічність і надійність ролика в цілому. 10 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 15 20 Ролик прокатного стану, що містить вал із цапфами й бочку, встановлену на валу, який відрізняється тим, що він обладнаний бочкуватими шпинками, встановленими в торцях бочки, які з'єднують в тангенціальному напрямку вал й бочку, крім того бочка встановлена на валу із зазором, а поверхня вала на частині між бочкуватими шпинками виконана увігнутою з радіусом кривизни, що визначається за формулою 2 R=L /8, де R - радіус кривизни поверхні вала між бочкуватими шпинками; L - відстань між бочкуватими шпинками; - зазор між бочкою й валом по середині ролика. 4 UA 110439 U Комп’ютерна верстка Л. Литвиненко Державна служба інтелектуальної власності України, вул. Василя Липківського, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: B21B 39/00
Мітки: ролик, прокатного, стану
Код посилання
<a href="https://ua.patents.su/7-110439-rolik-prokatnogo-stanu.html" target="_blank" rel="follow" title="База патентів України">Ролик прокатного стану</a>
Ролик розвертально-транспортного рольганга прокатного стана
Номер патенту: 34570
Опубліковано: 11.08.2008
Автори: Оконенко Сергій Іванович, Уткін Олексій Вікторович, Єлецьких Володимир Іванович, Брехов Євген Володимирович
МПК: B21B 39/00
Мітки: прокатного, ролик, стана, розвертально-транспортного, рольганга
Формула / Реферат:
1. Ролик розвертально-транспортного рольганга прокатного стана, що містить конічну бочку й опорні цапфи, який відрізняється тим, що бочка виконана з двох частин: одна - у вигляді зрізаного конуса, а друга - у вигляді циліндра, діаметр кола твірної якого дорівнює діаметрові меншої основи конуса.2. Ролик розвертально-транспортного рольганга прокатного стана за п. 1, який відрізняється тим, що циліндрична частина бочки ролика виконана...
Ролик прокатного стана
Номер патенту: 69205
Опубліковано: 25.04.2012
Автори: Шундрін Дмитро Олексійович, Майтамал Віктор Миколайович, Бобух Іван Олексійович, Бобух Олексій Іванович, Нецман Євген Григорович, Куракін Юрій Миколайович, Бекленіщев Олег Петрович, Убийкінь Валерій Васильович
МПК: B21B 27/08
Мітки: стана, прокатного, ролик
Формула / Реферат:
Ролик прокатного стана, що містить порожнисту бочку, кінцеві цапфи та вентиляційні канали, який відрізняється тим, що порожниста бочка жорстко з'єднана з кінцевими цапфами за допомогою шківів, в дисках яких розміщені вентиляційні канали, а на торцях (розташованих навпроти один одного) ободів шківів жорстко закріплені кришки, що мають циліндричні отвори з розтрубами, виконаними під кутом 10-20° до твірної отвору на довжині не менше половини...
Обвідний ролик прокатного стана
Номер патенту: 42918
Опубліковано: 27.07.2009
Автори: Путнокі Олександр Юліусович, Ніколенко Андрій Георгійович, Васильєв Олександр Геннадійович, Ніколаєв Віктор Олександрович, Жученко Станіслав Вікторович
МПК: B21B 39/34
Мітки: прокатного, ролик, стана, обвідний
Формула / Реферат:
Обвідний ролик прокатного стана, який відрізняється тим, що твірна ролика має форму опуклої параболи з кривизною f/D=0,0024-0,021, де f - величина опуклості твірної, D - діаметр обвідного ролика.
Ролик зони вторинного охолодження
Номер патенту: 27783
Опубліковано: 12.11.2007
Автори: Кузнецов Денис Юрійович, Стріченко Сергій Михайлович, Васильєв Денис Борисович, Куберський Сергій Володимирович, Луценко Віктор Олександрович
МПК: B22D 11/00
Мітки: ролик, охолодження, зони, вторинного
Формула / Реферат:
Ролик зони вторинного охолодження, що містить бочку, на якій виконані кільцеві проточки, що утворюють калібр, який відрізняється тим, що кільцеві проточки виконані з нахилом бічних стінок під кутом 11°-17° до поперечної осі бочки ролика.
Ролик ввідної арматури прокатного стана

Номер патенту: 2259
Опубліковано: 15.01.2004
Автори: Дорофєєв Дмитро Веніамінович, Алексєєв Володимир Павлович, Дарда Юрій Антонович, Івашкін Валентин Іванович, Білий Миколай Павлович
МПК: B21B 39/14, B21B 27/02
Мітки: ввідної, стана, арматури, прокатного, ролик
Формула / Реферат:
1. Ролик ввідної арматури прокатного стана, що містить втулку, на внутрішній поверхні якої встановлено підшипники кочення, розділені між собою буртиком, який відрізняється тим, що втулка додатково оснащена бандажем, виконаним у вигляді кільця з калібром на зовнішній поверхні, що встановлено на втулці симетрично її торцям, ширина кільця дорівнює ширині калібру плюс додатково 4-6 мм, ширина втулки вибрана з урахуванням подвоєної ширини...
Попередній патент: Субміліметровий газовий лазер
Наступний патент: Спосіб стимуляції регенерації кісткової тканини аквахелатами ag, cu, zn, mg, fe, co
Випадковий патент: Захисний чохол для тимчасово неексплуатуємого транспортного засобу