Пристрій компенсації реактивної потужності у перехідних і усталених режимах
Номер патенту: 117186
Опубліковано: 26.06.2017
Автори: Вербицький Євген Володимирович, Жуйков Валерій Якович
Формула / Реферат
1. Пристрій компенсації реактивної потужності у перехідних і усталених режимах, що складається з блока вимірювання потужності, в якому на основі вимірюваних миттєвих значень напруги і струму мережі формуються складові потужності Рt і Qt та подаються на вхід передавачів, на інший вхід яких подаються вектори гармонічних функцій ![]() , k=0, 1, 2..., які формує генератор, на виході передавачів формуються коефіцієнти розкладу складових потужності у ряд Фур'є РT і QT, які підсумовуються і подаються на вхід фільтра для фільтрування від завад, відфільтровані сигнали РT і QT віднімаються від еталонних значень
, k=0, 1, 2..., які формує генератор, на виході передавачів формуються коефіцієнти розкладу складових потужності у ряд Фур'є РT і QT, які підсумовуються і подаються на вхід фільтра для фільтрування від завад, відфільтровані сигнали РT і QT віднімаються від еталонних значень ![]() і
і ![]() та подаються на вхід регулятора, на виході якого формується опорний сигнал керування в частотній області, який складається з коефіцієнтів
та подаються на вхід регулятора, на виході якого формується опорний сигнал керування в частотній області, який складається з коефіцієнтів ![]() , сигнал керування подається на передавач, на інший вхід якого подаються вектори гармонічних функцій
, сигнал керування подається на передавач, на інший вхід якого подаються вектори гармонічних функцій ![]() що приводить до формування на виході сигналу керування перетворювачем
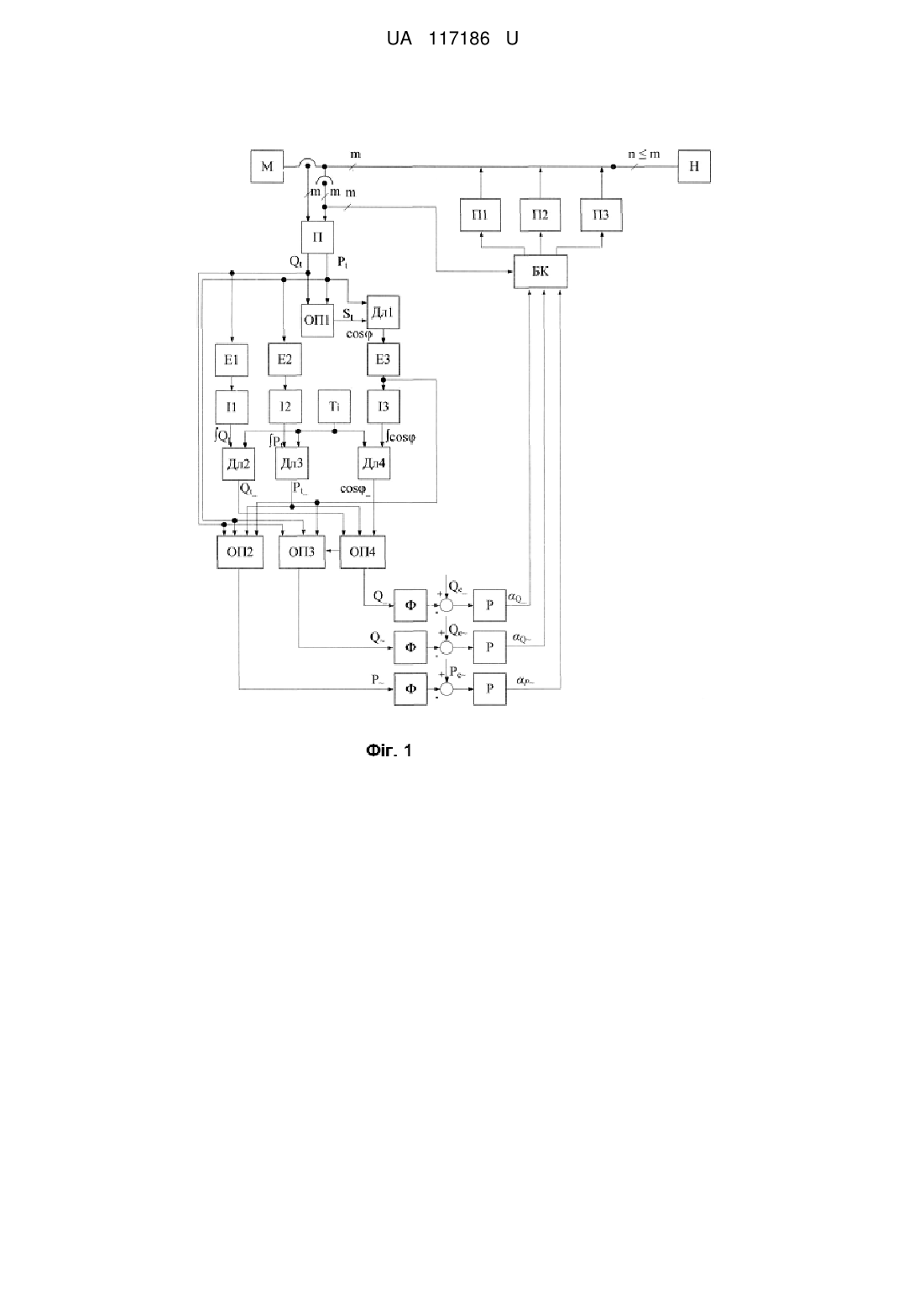
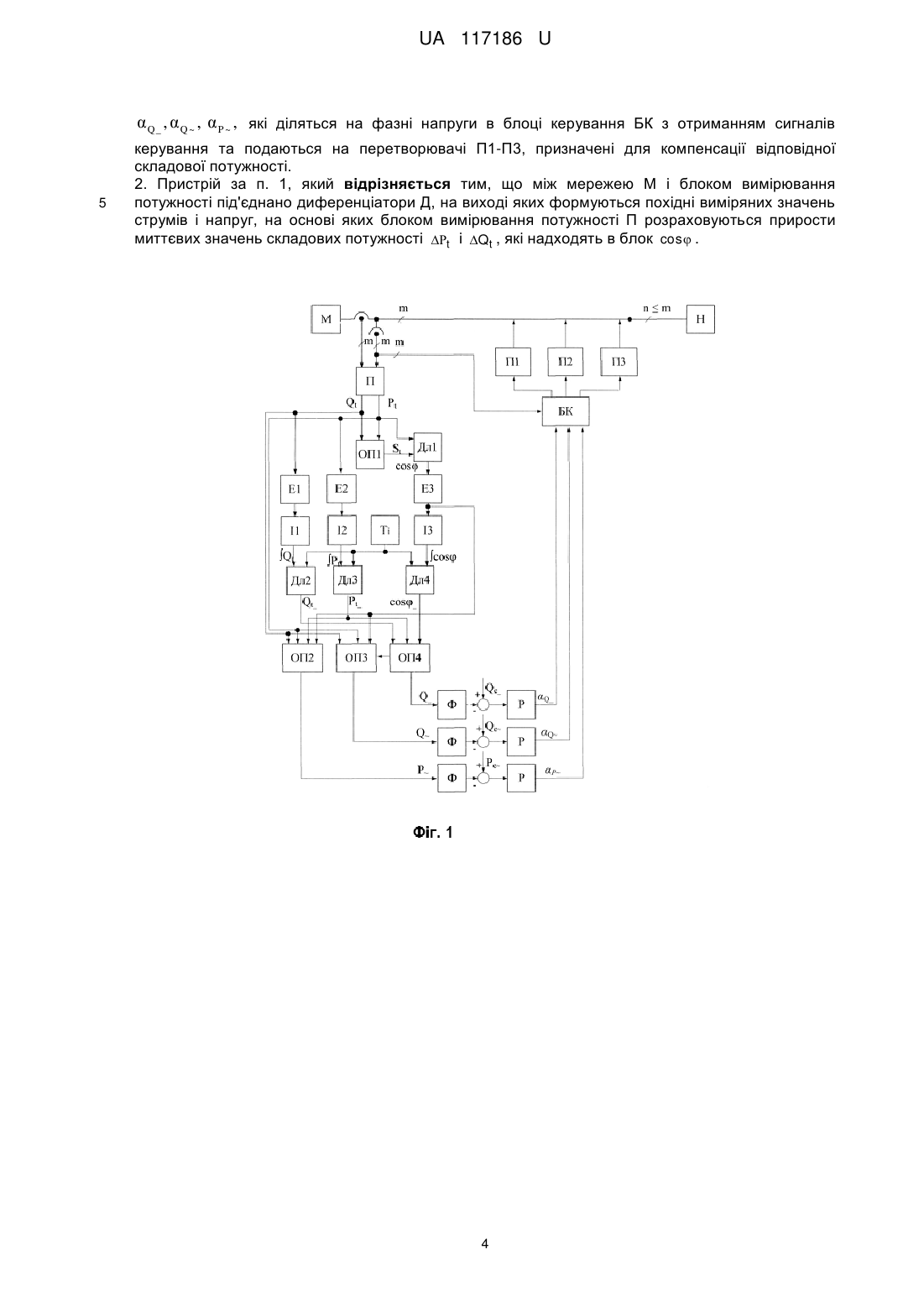
що приводить до формування на виході сигналу керування перетворювачем ![]() який в блоці керування ділиться на значення фазних напруг і подається на перетворювач, який компенсує реактивну енергію, згенеровану навантаженням, який відрізняється тим, що сигнали складових потужності Pt і Qt з виходу блока вимірювання потужності П подаються на вхід обчислювального пристрою ОП1, на виході якого формується миттєве значення повної потужності St, яке подається на вхід дільника Дл1, на інший вхід якого подається складова потужності Рt, а на його виході - формується миттєве значення коефіцієнта потужності
який в блоці керування ділиться на значення фазних напруг і подається на перетворювач, який компенсує реактивну енергію, згенеровану навантаженням, який відрізняється тим, що сигнали складових потужності Pt і Qt з виходу блока вимірювання потужності П подаються на вхід обчислювального пристрою ОП1, на виході якого формується миттєве значення повної потужності St, яке подається на вхід дільника Дл1, на інший вхід якого подається складова потужності Рt, а на його виході - формується миттєве значення коефіцієнта потужності ![]() , отримані дані якого екстраполюються в екстраполяторі Е3 та подаються на вхід інтегратора I3 і дільника Дл4, на інший вхід дільника Дл4 подається значення періоду інтегрування Т, а на виході дільника Дл4 формується середнє значення коефіцієнта потужності
, отримані дані якого екстраполюються в екстраполяторі Е3 та подаються на вхід інтегратора I3 і дільника Дл4, на інший вхід дільника Дл4 подається значення періоду інтегрування Т, а на виході дільника Дл4 формується середнє значення коефіцієнта потужності ![]() _, за допомогою екстраполяторів Е1 і Е2, інтеграторів I1 і I2, дільників Дл2 і Дл3 формуються середні значення складових потужності Pt__ і Qt__; отримані дані подаються на входи обчислювальних пристроїв ОП2-ОП4, а на виході формуються сигнали складових потужності, розділених на три окремих канали Q_, Q~, Р~, які віднімаються від еталонних значень Qe-, Qe~, Рe~, і подаються на регулятори Р, де формуються сигнали керування перетворювачами
_, за допомогою екстраполяторів Е1 і Е2, інтеграторів I1 і I2, дільників Дл2 і Дл3 формуються середні значення складових потужності Pt__ і Qt__; отримані дані подаються на входи обчислювальних пристроїв ОП2-ОП4, а на виході формуються сигнали складових потужності, розділених на три окремих канали Q_, Q~, Р~, які віднімаються від еталонних значень Qe-, Qe~, Рe~, і подаються на регулятори Р, де формуються сигнали керування перетворювачами ![]() які діляться на фазні напруги в блоці керування БК з отриманням сигналів керування та подаються на перетворювачі П1-П3, призначені для компенсації відповідної складової потужності.
які діляться на фазні напруги в блоці керування БК з отриманням сигналів керування та подаються на перетворювачі П1-П3, призначені для компенсації відповідної складової потужності.
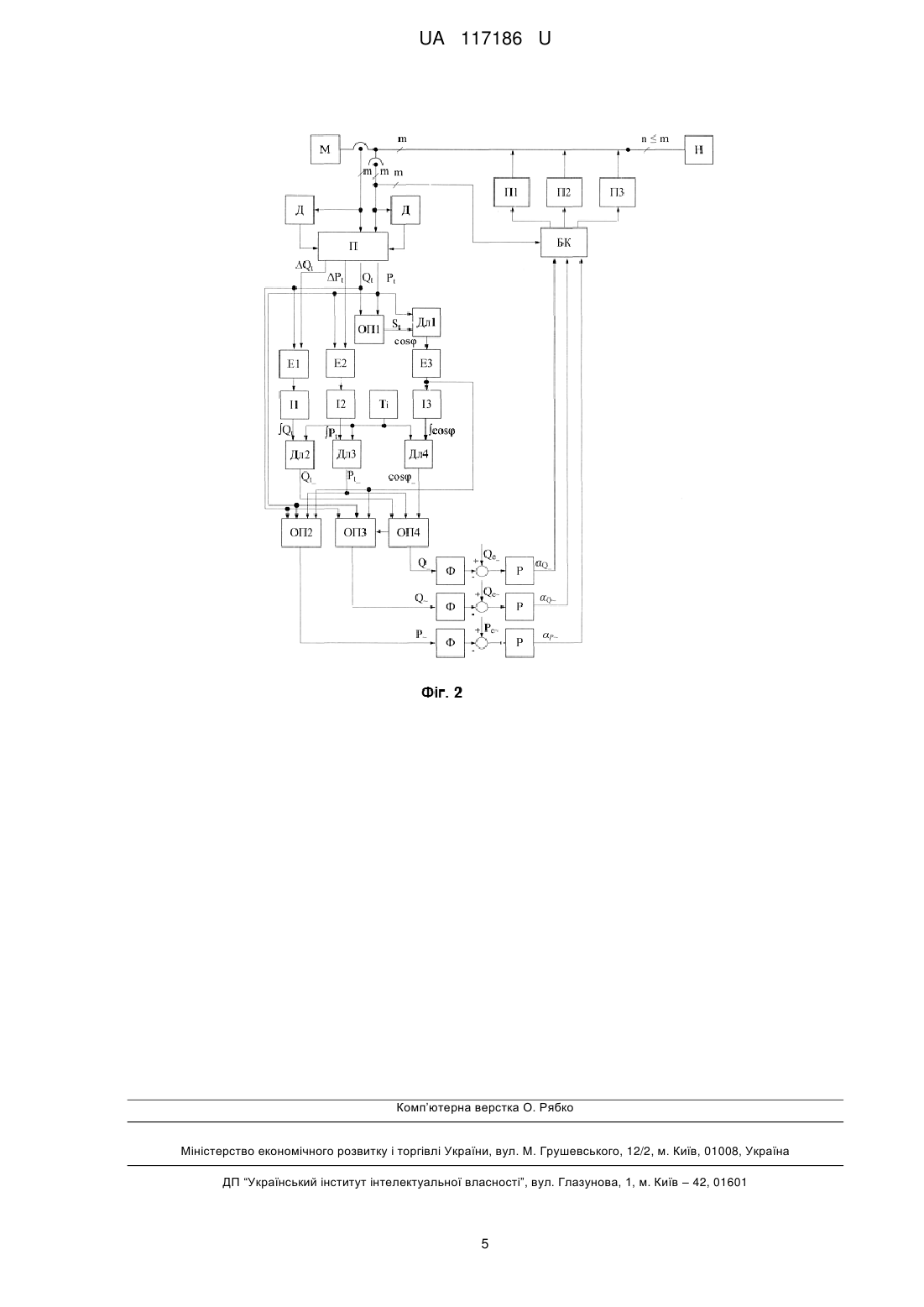
2. Пристрій по п. 1, який відрізняється тим, що між мережею М і блоком вимірювання потужності під'єднано диференціатори Д, на виході яких формуються похідні виміряних значень струмів і напруг, на основі яких блоком вимірювання потужності П розраховуються прирости миттєвих значень складових потужності ![]() і
і ![]() , які надходять в блок
, які надходять в блок ![]() .
.
Текст
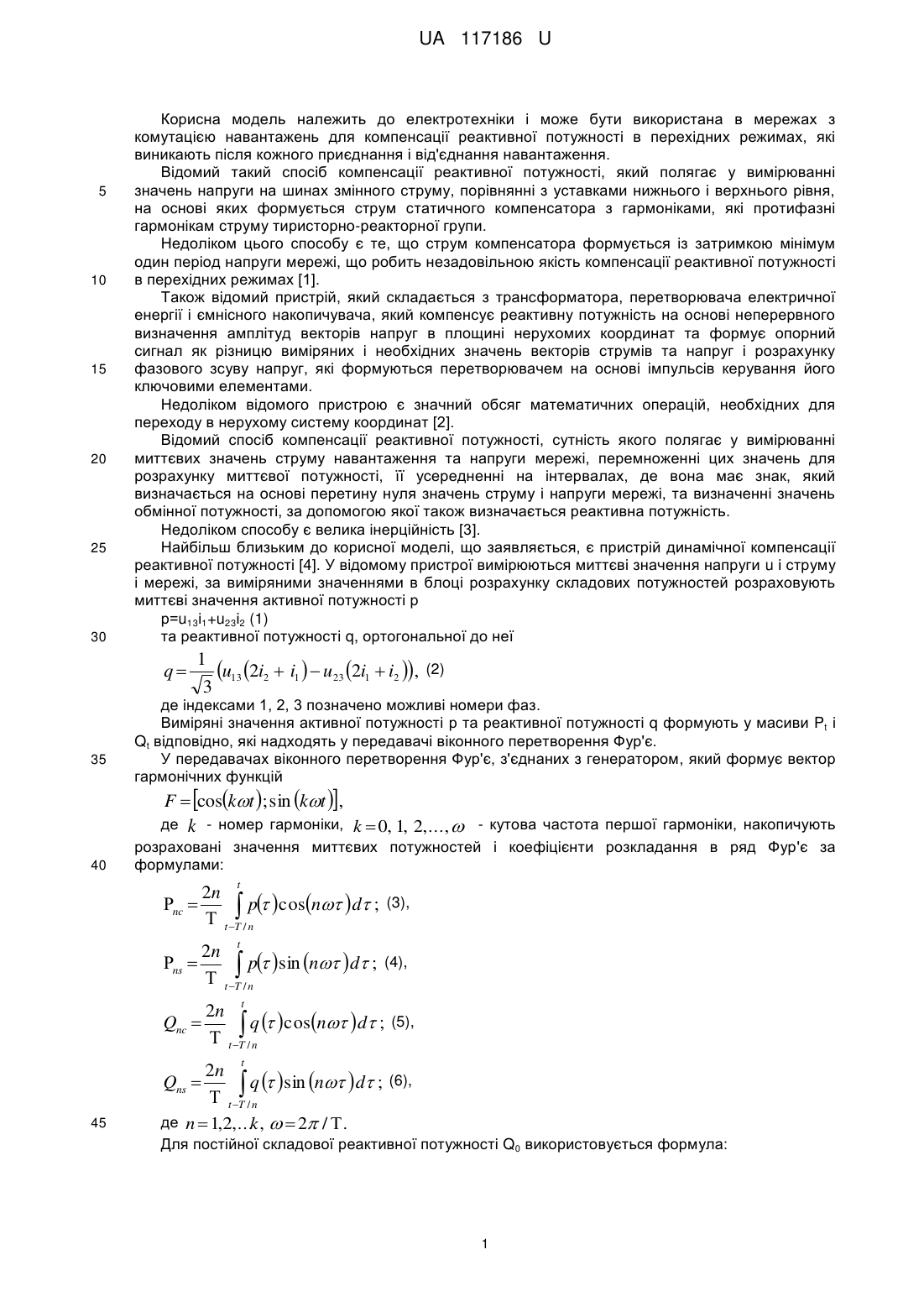
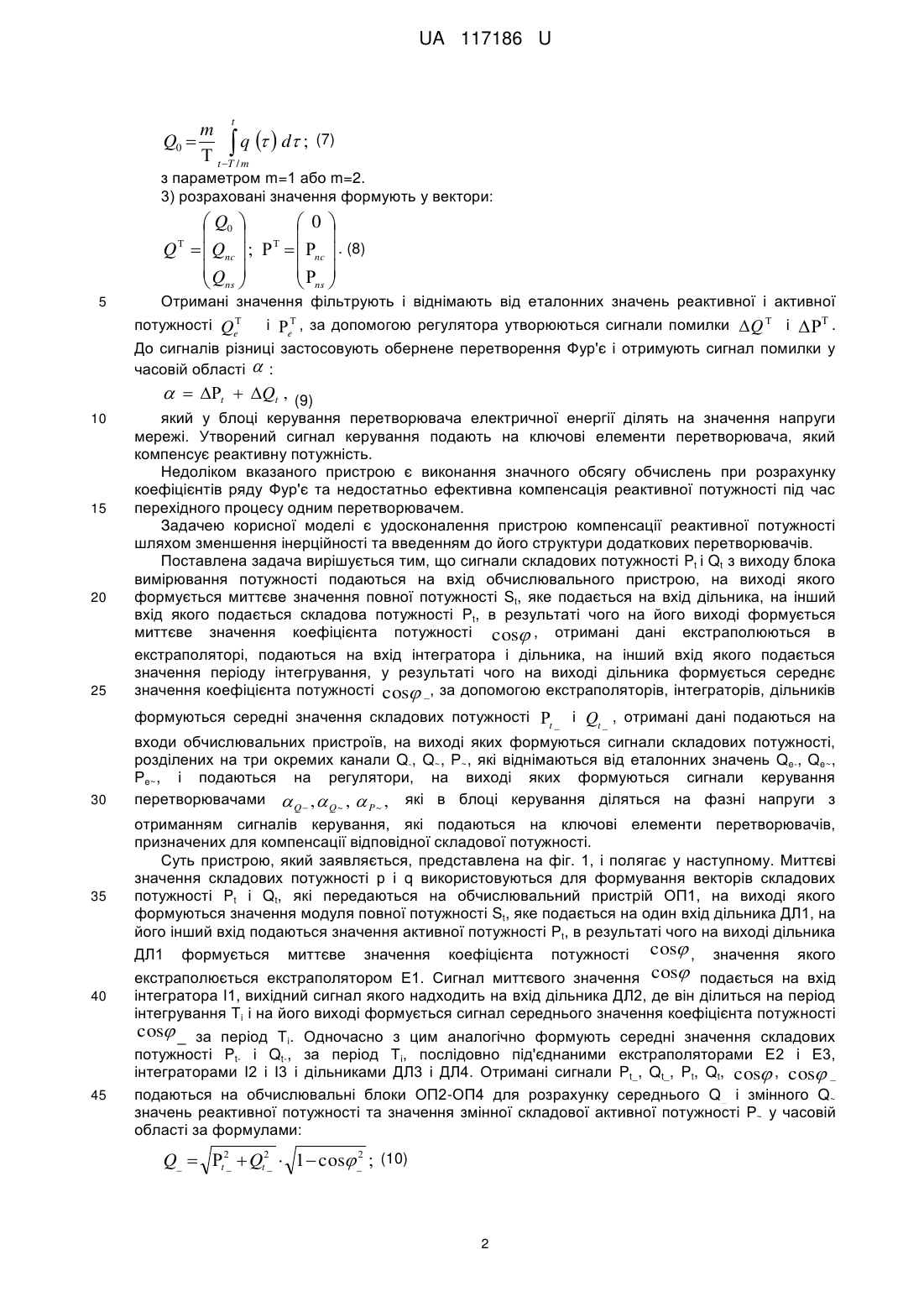
Реферат: UA 117186 U UA 117186 U 5 10 15 20 25 30 Корисна модель належить до електротехніки і може бути використана в мережах з комутацією навантажень для компенсації реактивної потужності в перехідних режимах, які виникають після кожного приєднання і від'єднання навантаження. Відомий такий спосіб компенсації реактивної потужності, який полягає у вимірюванні значень напруги на шинах змінного струму, порівнянні з уставками нижнього і верхнього рівня, на основі яких формується струм статичного компенсатора з гармоніками, які протифазні гармонікам струму тиристорно-реакторної групи. Недоліком цього способу є те, що струм компенсатора формується із затримкою мінімум один період напруги мережі, що робить незадовільною якість компенсації реактивної потужності в перехідних режимах [1]. Також відомий пристрій, який складається з трансформатора, перетворювача електричної енергії і ємнісного накопичувача, який компенсує реактивну потужність на основі неперервного визначення амплітуд векторів напруг в площині нерухомих координат та формує опорний сигнал як різницю виміряних і необхідних значень векторів струмів та напруг і розрахунку фазового зсуву напруг, які формуються перетворювачем на основі імпульсів керування його ключовими елементами. Недоліком відомого пристрою є значний обсяг математичних операцій, необхідних для переходу в нерухому систему координат [2]. Відомий спосіб компенсації реактивної потужності, сутність якого полягає у вимірюванні миттєвих значень струму навантаження та напруги мережі, перемноженні цих значень для розрахунку миттєвої потужності, її усередненні на інтервалах, де вона має знак, який визначається на основі перетину нуля значень струму і напруги мережі, та визначенні значень обмінної потужності, за допомогою якої також визначається реактивна потужність. Недоліком способу є велика інерційність [3]. Найбільш близьким до корисної моделі, що заявляється, є пристрій динамічної компенсації реактивної потужності [4]. У відомому пристрої вимірюються миттєві значення напруги u і струму і мережі, за виміряними значеннями в блоці розрахунку складових потужностей розраховують миттєві значення активної потужності р р=u13і1+u23і2 (1) та реактивної потужності q, ортогональної до неї q 35 1 u13 2i2 i1 u23 2i1 i2 , (2) 3 де індексами 1, 2, 3 позначено можливі номери фаз. Виміряні значення активної потужності р та реактивної потужності q формують у масиви Pt і Qt відповідно, які надходять у передавачі віконного перетворення Фур'є. У передавачах віконного перетворення Фур'є, з'єднаних з генератором, який формує вектор гармонічних функцій F coskt ; sin kt , де k - номер гармоніки, k 0, 1, 2,..., - кутова частота першої гармоніки, накопичують 40 розраховані значення миттєвих потужностей і коефіцієнти розкладання в ряд Фур'є за формулами: t nc 2n p cosn d ; (3), t T / n t 2n ns p sin n d ; (4), t T / n t Qnc 2n q cosn d ; (5), t T / n t 45 2n Qns q sin n d ; (6), t T / n де n 1,2,... , 2 / . k Для постійної складової реактивної потужності Q0 використовується формула: 1 UA 117186 U t Q0 m q d ; (7) t T / m з параметром m=1 або m=2. 3) розраховані значення формують у вектори: Q0 0 Q Qnc ; nc . (8) Q ns ns 5 Отримані значення фільтрують і віднімають від еталонних значень реактивної і активної потужності Qe і e , за допомогою регулятора утворюються сигнали помилки Q і . До сигналів різниці застосовують обернене перетворення Фур'є і отримують сигнал помилки у часовій області : t Qt , 25 (9) який у блоці керування перетворювача електричної енергії ділять на значення напруги мережі. Утворений сигнал керування подають на ключові елементи перетворювача, який компенсує реактивну потужність. Недоліком вказаного пристрою є виконання значного обсягу обчислень при розрахунку коефіцієнтів ряду Фур'є та недостатньо ефективна компенсація реактивної потужності під час перехідного процесу одним перетворювачем. Задачею корисної моделі є удосконалення пристрою компенсації реактивної потужності шляхом зменшення інерційності та введенням до його структури додаткових перетворювачів. Поставлена задача вирішується тим, що сигнали складових потужності Pt і Qt з виходу блока вимірювання потужності подаються на вхід обчислювального пристрою, на виході якого формується миттєве значення повної потужності St, яке подається на вхід дільника, на інший вхід якого подається складова потужності Pt, в результаті чого на його виході формується миттєве значення коефіцієнта потужності cos , отримані дані екстраполюються в екстраполяторі, подаються на вхід інтегратора і дільника, на інший вхід якого подається значення періоду інтегрування, у результаті чого на виході дільника формується середнє значення коефіцієнта потужності cos _, за допомогою екстраполяторів, інтеграторів, дільників 30 формуються середні значення складових потужності t _ і Qt _ , отримані дані подаються на входи обчислювальних пристроїв, на виході яких формуються сигнали складових потужності, розділених на три окремих канали Q-, Q~, Р~, які віднімаються від еталонних значень Qe-, Qe~, Рe~, і подаються на регулятори, на виході яких формуються сигнали керування перетворювачами Q , Q ~ , P ~ , які в блоці керування діляться на фазні напруги з 10 15 20 35 40 45 отриманням сигналів керування, які подаються на ключові елементи перетворювачів, призначених для компенсації відповідної складової потужності. Суть пристрою, який заявляється, представлена на фіг. 1, і полягає у наступному. Миттєві значення складових потужності р і q використовуються для формування векторів складових потужності Pt і Qt, які передаються на обчислювальний пристрій ОП1, на виході якого формуються значення модуля повної потужності St, яке подається на один вхід дільника ДЛ1, на його інший вхід подаються значення активної потужності Pt, в результаті чого на виході дільника ДЛ1 формується миттєве значення коефіцієнта потужності cos , значення якого екстраполюється екстраполятором Е1. Сигнал миттєвого значення cos подається на вхід інтегратора I1, вихідний сигнал якого надходить на вхід дільника ДЛ2, де він ділиться на період інтегрування Ti і на його виході формується сигнал середнього значення коефіцієнта потужності cos _ за період Ti. Одночасно з цим аналогічно формують середні значення складових потужності Pt- і Qt-, за період Ті, послідовно під'єднаними екстраполяторами Е2 і Е3, інтеграторами I2 і І3 і дільниками ДЛ3 і ДЛ4. Отримані сигнали Pt_, Qt_, Pt, Qt, cos , cos _ подаються на обчислювальні блоки ОП2-ОП4 для розрахунку середнього Q_ і змінного Q~ значень реактивної потужності та значення змінної складової активної потужності Р~ у часовій області за формулами: 2 Q_ t2_ Qt2_ 1 cos _ ; (10) 2 UA 117186 U Q~ t2 Qt2 1 cos 2 Q; (11) ~ t2 Qt2 cos t . (12) 5 10 Значення складових потужності Q-, Q~ і Р~ передаються по трьох окремих каналах в часовій області, що усуває необхідність у використанні передавачів прямого і зворотного віконного перетворення Фур'є. Отримані значення складових потужності Q-, Q~, Р~ віднімаються від еталонних значень в часовій області Qe-, Qe~ i Рe~ та передаються по трьох каналах керування Q , Q ~ , P ~ , на вхід блока керування перетворювачами, де вони діляться на значення напруги мережі та подаються на ключові елементи відповідного перетворювача, який компенсує відповідну складову потужності. На фіг. 2 представлена схема пристрою з диференціаторами Д, які під'єднано до блока вимірювання потужності, на виході яких формуються прирости складових потужності t і Qt , які подаються на екстраполятори Е1 і Е2 для підвищення точності екстраполяції 15 20 25 складових потужності Pt і Qt. Джерела інформації: 1. Патент РФ 2280934, МПК H02J 3/18. "Способ управления устройством компенсации реактивной мощности" // Дайновский Р.А., Краснова Б.П., Мазуров М.И., Николаев А.В. - опубл. 27.07.2007. 2. Патент US 6025701, МПК G05F 1/70. "Static and Dynamic Mains Voltage Support by a Static Power Factor Correction Device Having a Self-commutated Converter" // Michael Weinhold. - опубл. 10.11.1997. 3. Авторське свідоцтво SU 1480014, H02J 3/18. "Способ компенсации обменной и реактивной мощности" // Тонкаль В.Е., Жуйков В.Я., Денисюк СП. -опубл. 15.05.1989. 4. Патент DE 3308560 С2, МПК H02J 3/18. "Verfahren und Schaltungsanordnung zur dynamischen Dlindleistungskompensation und Symmetrierung von unsymmetrischen Netzen und Lasten mit Blinleistungsstromrichtern" // Hans-Peter Beck. - опубл. 05.10.1989. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 1. Пристрій компенсації реактивної потужності у перехідних і усталених режимах, що складається з блока вимірювання потужності, в якому на основі вимірюваних миттєвих значень напруги і струму мережі формуються складові потужності Рt і Qt та подаються на вхід передавачів, на інший вхід яких подаються вектори гармонічних функцій F coskωω ; sin kωω , , k=0, 1, 2..., які формує генератор, на виході передавачів формуються T T коефіцієнти розкладу складових потужності у ряд Фур'є Р і Q , які підсумовуються і подаються T T на вхід фільтра для фільтрування від завад, відфільтровані сигнали Р і Q віднімаються від еталонних значень Q і e та подаються на вхід регулятора, на виході якого формується e 35 40 45 50 Τ Τ опорний сигнал керування в частотній області, який складається з коефіцієнтів ΔQ , ΔΡ , сигнал керування подається на передавач, на інший вхід якого подаються вектори гармонічних функцій F coskωω ; sin kωω , що приводить до формування на виході сигналу керування перетворювачем t Qt , який в блоці керування ділиться на значення фазних напруг і подається на перетворювач, який компенсує реактивну енергію, згенеровану навантаженням, який відрізняється тим, що сигнали складових потужності Pt і Qt з виходу блока вимірювання потужності П подаються на вхід обчислювального пристрою ОП1, на виході якого формується миттєве значення повної потужності St, яке подається на вхід дільника Дл1, на інший вхід якого подається складова потужності Рt, а на його виході - формується миттєве значення коефіцієнта потужності cos , отримані дані якого екстраполюються в екстраполяторі Е3 та подаються на вхід інтегратора I3 і дільника Дл4, на інший вхід дільника Дл4 подається значення періоду інтегрування Т, а на виході дільника Дл4 формується середнє значення коефіцієнта потужності cos _, за допомогою екстраполяторів Е1 і Е2, інтеграторів I1 і I2, дільників Дл2 і Дл3 формуються середні значення складових потужності Pt_ і Qt_; отримані дані подаються на входи обчислювальних пристроїв ОП2-ОП4, а на виході формуються сигнали складових потужності, розділених на три окремих канали Q_, Q~, Р~, які віднімаються від еталонних значень Qe_, Qe~, Рe~, і подаються на регулятори Р, де формуються сигнали керування перетворювачами 3 UA 117186 U α Q_ , α Q ~ , α P ~ , які діляться на фазні напруги в блоці керування БК з отриманням сигналів 5 керування та подаються на перетворювачі П1-П3, призначені для компенсації відповідної складової потужності. 2. Пристрій за п. 1, який відрізняється тим, що між мережею М і блоком вимірювання потужності під'єднано диференціатори Д, на виході яких формуються похідні виміряних значень струмів і напруг, на основі яких блоком вимірювання потужності П розраховуються прирости миттєвих значень складових потужності t і Qt , які надходять в блок cos . 4 UA 117186 U Комп’ютерна верстка О. Рябко Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Автори англійськоюZhuikov Valerii Yakovych, Verbytskyi Yevhen Volodymyrovych
Автори російськоюЖуйков Валерий Яковлевич, Вербицкий Евгений Владимирович
МПК / Мітки
МПК: H02J 3/18
Мітки: режимах, усталених, потужності, перехідних, пристрій, компенсації, реактивної
Код посилання
<a href="https://ua.patents.su/7-117186-pristrijj-kompensaci-reaktivno-potuzhnosti-u-perekhidnikh-i-ustalenikh-rezhimakh.html" target="_blank" rel="follow" title="База патентів України">Пристрій компенсації реактивної потужності у перехідних і усталених режимах</a>
Спосіб компенсації реактивної потужності в мережах електропостачання
Номер патенту: 36163
Опубліковано: 10.10.2008
Автори: Коваленко Любов Рафаїлівна, Тараканов Олександр Володимирович
МПК: H02J 3/18
Мітки: мережах, реактивної, спосіб, електропостачання, потужності, компенсації
Формула / Реферат:
Спосіб компенсації реактивної потужності в мережах електропостачання, який включає вимір струму і напруги ємнісного накопичувача, а також порівняння обмірюваних значень з заданими і керування потоком енергії ємнісного накопичувача за результатами порівняння, який відрізняється тим, що встановлений перетворювач реактивної потужності, сигнал від якого подається до блока керування з можливістю розрядки ємнісного накопичувача.
Пристрій для компенсації реактивної потужності трифазного навантаження
Номер патенту: 94181
Опубліковано: 11.04.2011
Автори: Бурбело Михайло Йосипович, Никитенко Максим Васильович
МПК: H02J 3/00
Мітки: трифазного, реактивної, пристрій, потужності, компенсації, навантаження
Формула / Реферат:
Пристрій для компенсації реактивної потужності трифазного навантаження, що складається з компенсатора, який містить приєднані до мережі паралельно трифазному навантаженню трифазні силові фільтри, кожен з яких виконаний з послідовно з'єднаних конденсаторів і фільтрових реакторів, ввімкнених в зірку, та тиристорно-реакторну групу, яка складається з послідовно з'єднаних компенсуючих реакторів та зустрічно-паралельно ввімкнених тиристорів,...
Пристрій компенсації реактивної потужності

Номер патенту: 88724
Опубліковано: 25.03.2014
Автори: Федорець Сергій Григорович, Федорець Алла Петрівна, Федорець Дмитро Вітальович
МПК: H02J 3/18
Мітки: реактивної, пристрій, потужності, компенсації
Формула / Реферат:
Пристрій компенсації реактивної потужності, що включає коло з послідовно з'єднаних батарей конденсаторів і реактора, у вигляді котушки, що має гвинтову обмотку, а також пари зустрічно-паралельно з'єднаних тиристорів, який відрізняється тим, що всередині котушки з обмоткою реактора коаксіально з повітряним прозором із можливістю переміщення уздовж осі реактора, встановлена додаткова котушка з гвинтовою обмоткою, що навита на діелектричну...
Установка компенсації реактивної потужності
Номер патенту: 36572
Опубліковано: 27.10.2008
Автори: Гнатуша Дмитро Володимирович, Кашуба Ганна Володимирівна, Павліщев Олександр Олексійович, Гнатуша Володимир Дмитрович
МПК: H02J 3/18
Мітки: компенсації, потужності, установка, реактивної
Формула / Реферат:
1. Установка компенсації реактивної потужності, що містить ступені регулювання коефіцієнта потужності, комутаційну апаратуру, ланцюги сигналізації, керування і захистів, яка відрізняється тим, що до кожної фази мережі підключена N-на кількість регульованих ступенів коефіцієнта потужності, при цьому у першому ступені розміщена батарея послідовно з'єднаних конденсаторів, включених постійно при роботі установки, вакуумний вимикач з убудованими...
Установка для компенсації реактивної потужності

Номер патенту: 65257
Опубліковано: 15.03.2004
Автори: Гнатуша Володимир Дмитрійович, Павліщев Олександр Олексійович, Ніколенко Сергій Олександрович, Гнатуша Дмитро Володимирович
МПК: H02J 3/18
Мітки: установка, реактивної, компенсації, потужності
Формула / Реферат:
Установка для компенсації реактивної потужності , що містить конденсаторну батарею, захищену розрядними резисторами, яка відрізняється тим, що в кожну лінію конденсаторної секції введений оптосемістор, з'єднаний із блоком керування і встановлений на повздовжніх радіаторах охолодження, що виконують роль струмоведучих шин, причому вхідний фідер установки безпосередньо підключений до корпусів повздовжніх радіаторів охолодження.
Попередній патент: Спосіб отримання текстильних матеріалів з антимікробними властивостями
Наступний патент: Вузол з’єднання торців обшивних дощок
Випадковий патент: Спосіб захисту чорної смородини від пошкоджень личинками златок