Спосіб індентифікації електромагнітних параметрів асинхронних двигунів в пускових режимах роботи
Номер патенту: 119742
Опубліковано: 10.10.2017
Автори: Ромашихін Юрій Володимирович, Родькін Дмитро Йосипович, Авраменко Дмитро Сергійович, Руденко Микита Андрійович

Формула / Реферат
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів в пускових режимах роботи, який полягає у тому, що двигун підключають до джерела синусоїдальної напруги промислової частоти, вимірюються сигнали напруги та струму статора при номінальній напрузі живлення двигуна, записуються виміряні сигнали напруги та струму в електронну обчислювальну машину та представляються у вигляді тригонометричних рядів, формуються гармонічні складові миттєвої потужності для джерела живлення та елементів схеми заміщення, складається система ідентифікаційних рівнянь з використанням складових миттєвої потужності, вирішується система рівнянь та визначаються електромагнітні параметри асинхронного двигуна, який відрізняється тим, що сигнали напруги та струму статора вимірюються при нерухомому роторі і при декількох значеннях зниженої напруги живлення, при формуванні рівнянь балансу складових миттєвої потужності враховується вплив ефекту витиснення струму як залежність активного опору ротора від роторного струму:
![]() ,
,
де ![]() - активний опір ротора, що має залежність від струму ротора, для врахування ефекту витиснення струму;
- активний опір ротора, що має залежність від струму ротора, для врахування ефекту витиснення струму; ![]() - активний опір без впливу ефекту витіснення струму;
- активний опір без впливу ефекту витіснення струму; ![]() - струм ротора;
- струм ротора; ![]() - коефіцієнт, що враховує витиснення струму і визначається шляхом апроксимації графіка залежності
- коефіцієнт, що враховує витиснення струму і визначається шляхом апроксимації графіка залежності ![]() .
.
Текст
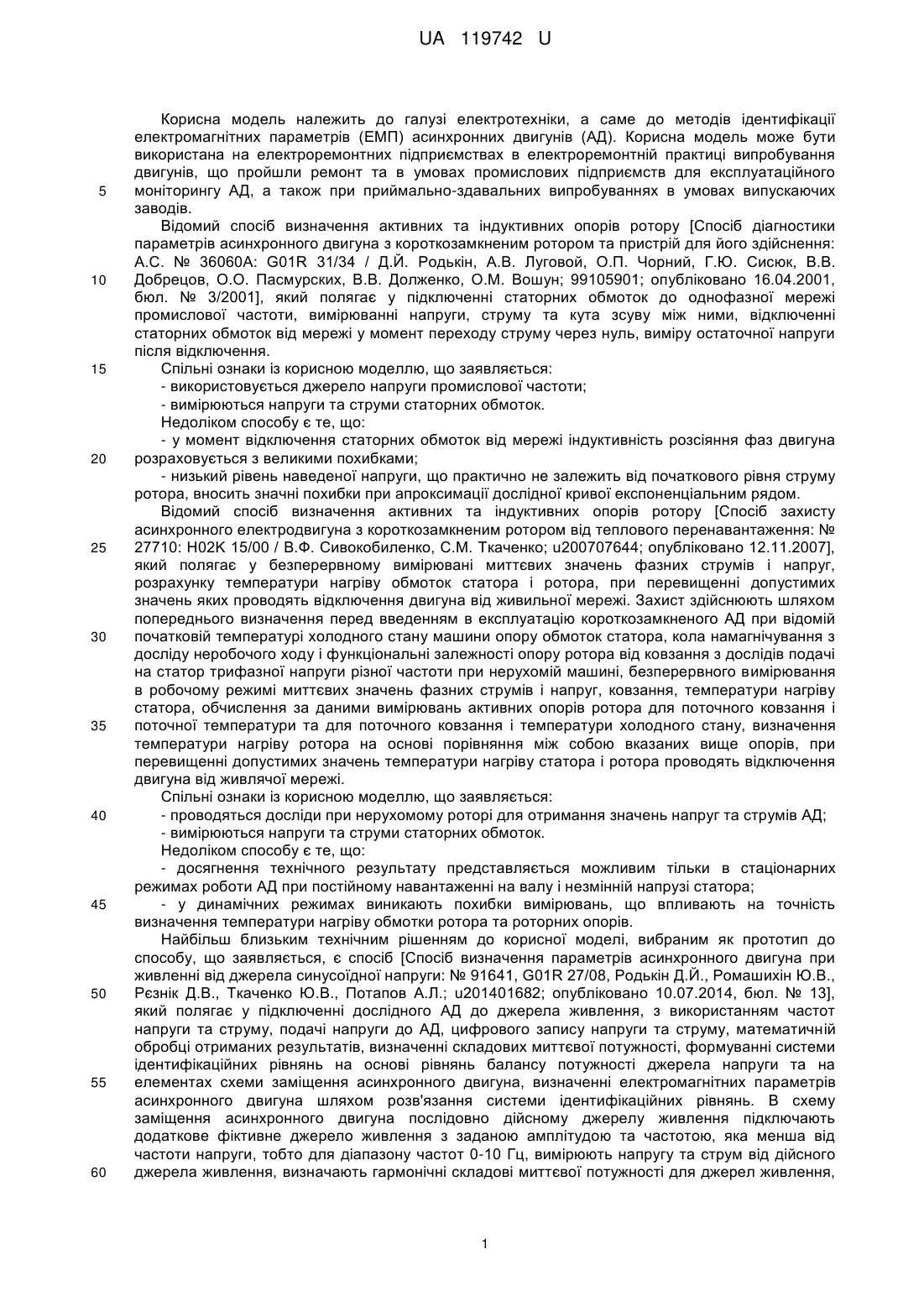
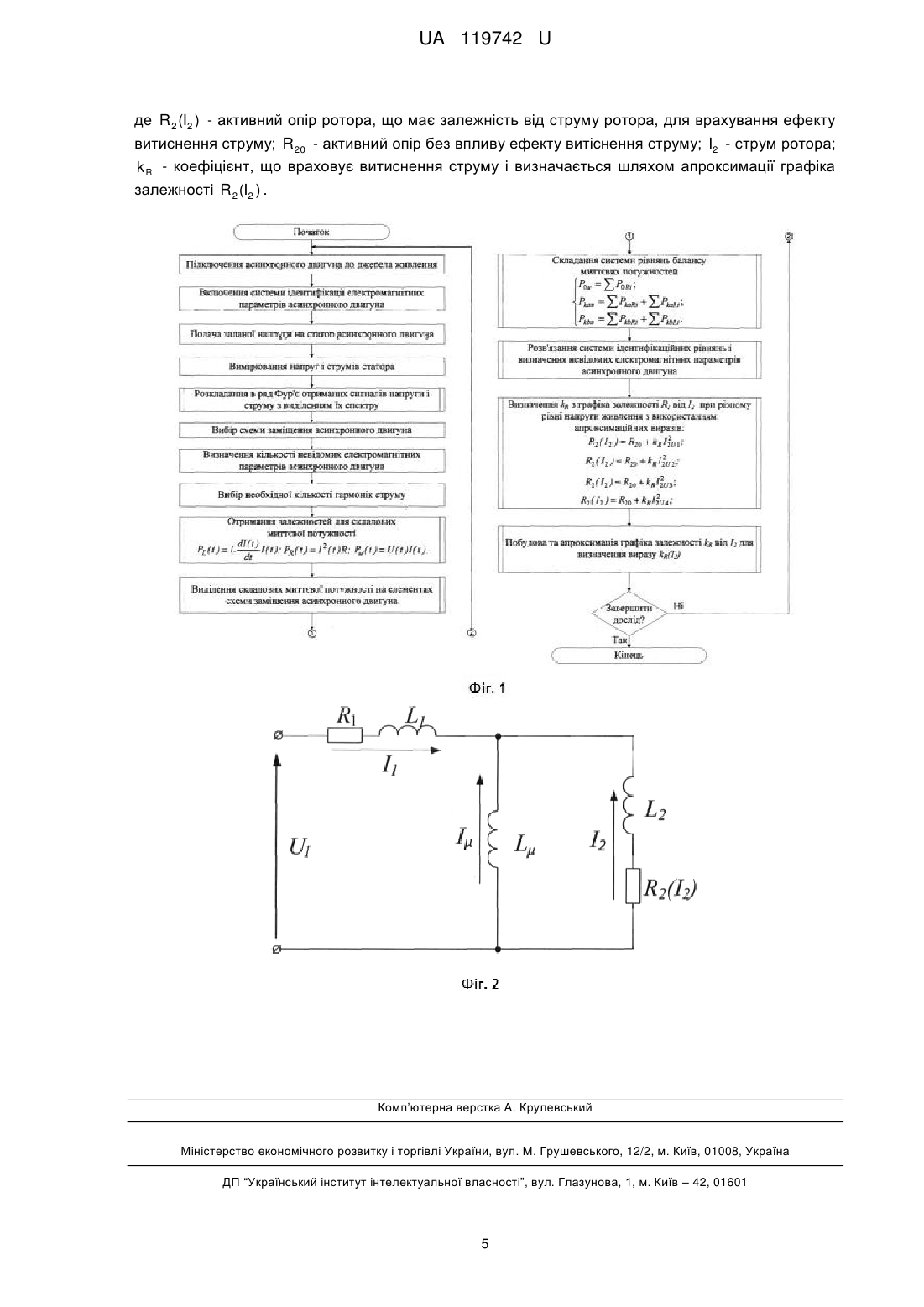
Реферат: Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів в пускових режимах роботи полягає у тому, що двигун підключають до джерела синусоїдальної напруги промислової частоти, вимірюються сигнали напруги та струму статора при номінальній напрузі живлення двигуна, записуються виміряні сигнали напруги та струму в електронну обчислювальну машину та представляються у вигляді тригонометричних рядів, формуються гармонічні складові миттєвої потужності для джерела живлення та елементів схеми заміщення, складається система ідентифікаційних рівнянь з використанням складових миттєвої потужності, вирішується система рівнянь та визначаються електромагнітні параметри асинхронного двигуна, причому сигнали напруги та струму статора вимірюються при нерухомому роторі і при декількох значеннях зниженої напруги живлення, при формуванні рівнянь балансу складових миттєвої потужності враховується вплив ефекту витиснення струму як залежність активного опору ротора від роторного струму. UA 119742 U (12) UA 119742 U UA 119742 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до галузі електротехніки, а саме до методів ідентифікації електромагнітних параметрів (ЕМП) асинхронних двигунів (АД). Корисна модель може бути використана на електроремонтних підприємствах в електроремонтній практиці випробування двигунів, що пройшли ремонт та в умовах промислових підприємств для експлуатаційного моніторингу АД, а також при приймально-здавальних випробуваннях в умовах випускаючих заводів. Відомий спосіб визначення активних та індуктивних опорів ротору [Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення: А.С. № 36060А: G01R 31/34 / Д.Й. Родькін, А.В. Луговой, О.П. Чорний, Г.Ю. Сисюк, В.В. Добрецов, О.О. Пасмурских, В.В. Долженко, О.М. Вошун; 99105901; опубліковано 16.04.2001, бюл. № 3/2001], який полягає у підключенні статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, відключенні статорних обмоток від мережі у момент переходу струму через нуль, виміру остаточної напруги після відключення. Спільні ознаки із корисною моделлю, що заявляється: - використовується джерело напруги промислової частоти; - вимірюються напруги та струми статорних обмоток. Недоліком способу є те, що: - у момент відключення статорних обмоток від мережі індуктивність розсіяння фаз двигуна розраховується з великими похибками; - низький рівень наведеної напруги, що практично не залежить від початкового рівня струму ротора, вносить значні похибки при апроксимації дослідної кривої експоненціальним рядом. Відомий спосіб визначення активних та індуктивних опорів ротору [Спосіб захисту асинхронного електродвигуна з короткозамкненим ротором від теплового перенавантаження: № 27710: Н02K 15/00 / В.Ф. Сивокобиленко, С.М. Ткаченко; u200707644; опубліковано 12.11.2007], який полягає у безперервному вимірювані миттєвих значень фазних струмів і напруг, розрахунку температури нагріву обмоток статора і ротора, при перевищенні допустимих значень яких проводять відключення двигуна від живильної мережі. Захист здійснюють шляхом попереднього визначення перед введенням в експлуатацію короткозамкненого АД при відомій початковій температурі холодного стану машини опору обмоток статора, кола намагнічування з досліду неробочого ходу і функціональні залежності опору ротора від ковзання з дослідів подачі на статор трифазної напруги різної частоти при нерухомій машині, безперервного вимірювання в робочому режимі миттєвих значень фазних струмів і напруг, ковзання, температури нагріву статора, обчислення за даними вимірювань активних опорів ротора для поточного ковзання і поточної температури та для поточного ковзання і температури холодного стану, визначення температури нагріву ротора на основі порівняння між собою вказаних вище опорів, при перевищенні допустимих значень температури нагріву статора і ротора проводять відключення двигуна від живлячої мережі. Спільні ознаки із корисною моделлю, що заявляється: - проводяться досліди при нерухомому роторі для отримання значень напруг та струмів АД; - вимірюються напруги та струми статорних обмоток. Недоліком способу є те, що: - досягнення технічного результату представляється можливим тільки в стаціонарних режимах роботи АД при постійному навантаженні на валу і незмінній напрузі статора; - у динамічних режимах виникають похибки вимірювань, що впливають на точність визначення температури нагріву обмотки ротора та роторних опорів. Найбільш близьким технічним рішенням до корисної моделі, вибраним як прототип до способу, що заявляється, є спосіб [Спосіб визначення параметрів асинхронного двигуна при живленні від джерела синусоїдної напруги: № 91641, G01R 27/08, Родькін Д.Й., Ромашихін Ю.В., Рєзнік Д.В., Ткаченко Ю.В., Потапов А.Л.; u201401682; опубліковано 10.07.2014, бюл. № 13], який полягає у підключенні дослідного АД до джерела живлення, з використанням частот напруги та струму, подачі напруги до АД, цифрового запису напруги та струму, математичній обробці отриманих результатів, визначенні складових миттєвої потужності, формуванні системи ідентифікаційних рівнянь на основі рівнянь балансу потужності джерела напруги та на елементах схеми заміщення асинхронного двигуна, визначенні електромагнітних параметрів асинхронного двигуна шляхом розв'язання системи ідентифікаційних рівнянь. В схему заміщення асинхронного двигуна послідовно дійсному джерелу живлення підключають додаткове фіктивне джерело живлення з заданою амплітудою та частотою, яка менша від частоти напруги, тобто для діапазону частот 0-10 Гц, вимірюють напругу та струм від дійсного джерела живлення, визначають гармонічні складові миттєвої потужності для джерел живлення, 1 UA 119742 U 5 10 15 20 25 30 35 40 включно з фіктивним джерелом та струмом від нього, елементів схеми заміщення, формують систему ідентифікаційних рівнянь балансу гармонік потужності для визначення електромагнітних параметрів схеми заміщення асинхронного двигуна, визначають електромагнітні параметри та складові гармоніки струмів кіл схеми заміщення асинхронного двигуна від фіктивного джерела живлення. Спільні ознаки із корисною моделлю, що заявляється: - використовується джерело синусоїдальної напруги; - вимірюються сигнали напруги та струму на статорі АД; - записуються виміряні сигнали напруги та струму в електронну обчислювальну машину (ЕОМ); - сигнали струму та напруги представляються у вигляді тригонометричних рядів; - формуються гармонічні складові миттєвої потужності для джерела живлення та елементів схеми заміщення; - формується система ідентифікаційних рівнянь балансу гармонік миттєвої потужності для визначення електромагнітних параметрів схеми заміщення асинхронного двигуна; - визначаються електромагнітні параметри та складові гармоніки струмів кіл схеми заміщення асинхронного двигуна. Недоліками наведеного способу визначення параметрів двигунів є: - не враховується збільшення активного опору ротора за рахунок ефекту витіснення струму, що призводить до зниження точності ідентифікації ЕМП АД в пусковому режимі роботи двигуна. Задача способу ідентифікації електромагнітних параметрів асинхронних двигунів в пускових режимах роботи є спрощення виконання операцій по визначенню електромагнітних параметрів асинхронних двигунів, підвищення достовірності та точності визначення параметрів схеми заміщення шляхом врахування зміни опорів ротора під дією ефекту витіснення струму в обмотках ротора під час пуску двигуна та у сталому режимі роботи. Поставлена задача досягається тим, що асинхронний двигун з нерухомим ротором підключають до джерела промислової частоти, вимірюють значення фазних струмів при номінальній синусоїдній напрузі живлення двигуна і при декількох значеннях зниженої напруги, записують виміряні сигнали напруги та струму в ЕОМ, виміряні сигнали напруги та струму представляють у вигляді рядів за допомогою перетворення Фур'є обирають схему заміщення та потрібну чисельність гармонік напруги та струму АД, складають систему ідентифікаційних рівнянь у вигляді рівності складових гармонік миттєвої потужності джерела напруги та суми складових гармонік миттєвої потужності для всіх елементів схеми заміщення, розв'язують систему ідентифікаційних рівнянь, визначають ЕМП, знаходять складові гармонік струмів кіл схеми заміщення АД, на основі отриманих ЕМП та струмів кіл схеми заміщення визначають пусковий струм, пусковий та критичний моменти. Корисна модель дозволяє підвищити надійність використання АД за рахунок збільшення точності визначення електромагнітних параметрів схеми заміщення АД при врахуванні ефекту витіснення струму як у пусковому, так і у сталому режимі роботи. Запропонований спосіб пояснюється наступними кресленнями, де на Фіг. 1 наведений алгоритм ідентифікації ЕМП АД, на якому прийняті наступні позначення: PL (t ) - миттєва потужність на індуктивності; PR ( t ) - миттєва потужність на активному опорі; Pu ( t ) - миттєва потужність джерела живлення; L - індуктивність; R - активний опір; I( t ) - миттєве значення струм; U( t ) - миттєве значення напруги; P0u - миттєва потужність джерела живлення на 45 нульовій гармоніці; P0Ri - миттєва потужність на активному опорі на нульовій гармоніці; Pkau косинусна складова миттєвої потужності джерела живлення на k-ій гармоніці; Pkbu - синусна складова миттєвої потужності джерела живлення на k-ій гармоніці; PkaRi - косинусна складова миттєвої потужності на активному опорі на k-ій гармоніці; PkbRi - синусна складова миттєвої 50 потужності на активному опорі на k-ій гармоніці; PkaLi - косинусна складова миттєвої потужності на індуктивності на k-ій гармоніці; PkbLi - синусна складова миттєвої потужності на індуктивності на k-ій гармоніці; i - індекс, що відповідає кожній з гілок схеми заміщення; R 2 (I2 ) - активний опір ротора, що має залежність від струму ротора, для врахування ефекту витиснення струму; R20 55 активний опір без впливу ефекту витіснення струму; k R - коефіцієнт, що враховує витиснення струму; I2U1 , I2U2 , I2U3 , I2U4 - значення струму ротора при різному рівні напруги живлення відповідно. 2 UA 119742 U На Фіг. 2 наведена Т-подібна схема заміщення загальнопромислового АД з урахуванням нелінійності роторного кола, на якій прийняті наступні позначення: U1 - напруга на статорі; I1 струм статора; I - струм кола намагнічування; I2 - струм ротора; R 1 - активний опір статора; L 1 - індуктивність статора; L - індуктивність кола намагнічування; L 2 - індуктивність ротора; R 2 (I2 ) 5 10 15 20 25 30 - активний опір ротора, що має залежність від струму ротора, для врахування ефекту витиснення струму. Спосіб реалізується наступним чином. Три фази АД за допомогою комутуючих апаратів підключають до мережі промислової частоти (50 Гц) з синусоїдальною напругою (Фіг. 1). В результаті того, що активний опір ротора має нелінійний характер зміни через вплив ефекту витіснення струму в роторі, у спектральному складі сигналу струму будуть присутні гармоніки. За допомогою датчиків напруги та струму, під'єднаних до клем у борновій коробці, вимірюють сигнал номінальної напруги живлення двигуна і декількох сигналів зниженої напруги та полігармонічний сигнал струму статора кожної з фаз АД з нерухомим ротором для кожного рівня напруги. Вимірювання проводиться за допомогою мікропроцесорного вимірювального контролера або ЕОМ обладнаної цифроаналоговим перетворювачем та аналогово-цифровим перетворювачем. Команди на вимірювання формує програмований таймер. Всі заміри передаються до оперативної пам'яті де фіксуються та зберігаються до закінчення процедури вимірів. Після кожного з дослідів дані запам'ятовуються. За допомогою ЕОМ зі спеціальним програмним забезпеченням виконується операція розкладання в ряд Фур'є отриманих сигналів напруги і струму з виділенням їх спектру, що зберігаються в оперативній пам'яті ЕОМ. За допомогою перетворення Фур'є визначаються синусні й косинусні складові напруг і струмів. Базуючись на тому, який тип АД розглядається, виконується вибір відповідної схеми заміщення. Відповідно до обраної схеми заміщення, наприклад (Фіг. 2), визначається кількість невідомих електромагнітних параметрів АД. Невідомими є електромагнітні параметри (активні та індуктивні опори) та струми кіл схеми заміщення (струми кола намагнічування та роторного кола). Ґрунтуючись на кількості невідомих ЕМП АД, обирається необхідна кількість значущих гармонік напруги і струму для складання рівнянь балансу гармонійних складових миттєвої потужності, таким чином щоб кількість рівнянь балансу миттєвої потужності була рівна або більша за кількість невідомих ЕМП АД. За допомогою синусних та косинусних складових напруги і струму АД виводяться залежності для складових миттєвої потужності схеми заміщення PL (t ) , PR ( t ) , Pu ( t ) : dI(t ) I(t ) ; dt PR ( t ) RI 2 ( t ) , Pu (t ) I(t )U(t ) , де PL (t ) - миттєва потужність на індуктивності, PR ( t ) - миттєва потужність на активному опорі, Pu ( t ) - миттєва потужність джерела живлення, L - індуктивність, R - активний опір, I( t ) миттєве значення струм, U( t ) - миттєве значення напруги. Для врахування ефекту витиснення струму в роторі використовується залежність активного опору ротора від роторного струму 4 R 2 (I2 ) R 20 I2k R1 k R2I2 k RnIi2 2 , у даному виразі враховуються гармоніки струму ротора у 2 відповідності до гармонік струму статора для складення системи ідентифікаційних рівнянь, R20 - активний опір без впливу ефекту витіснення струму, а k R1 , k R2 , k Rn - коефіцієнти, що враховують витиснення струму. У відповідності зі схемою заміщення складаються рівняння енергетичного балансу для складових миттєвої потужності. Рівняння енергетичного балансу складаються у відповідності з тим, що складові гармонік потужності на джерелі сигналу дорівнюють сумі складових гармонік потужностей на кожному елементі схеми заміщення АД. Як складові потужності використовуються активна потужність, реактивна потужність, канонічні складові миттєвої потужності, неканонічні складові миттєвої потужності, повні складові миттєвої потужності, які містять канонічні та неканонічні складові. Для N гармонік напруги і струму можна скласти 4N-1 рівнянь для складових миттєвої потужності. З рівнянь енергетичного балансу складових миттєвої потужності складається система: P0u P0Ri ; Pkau PkaRi PkaLi ; P P P ; kbRi kbLi kbu PL (t ) L 35 40 45 50 3 UA 119742 U 5 10 15 20 25 де P0u - потужність джерела живлення на нульовій гармоніці, P0Ri - потужність на активному опорі на нульовій гармоніці, i - індекс, що відповідає кожній з гілок схеми заміщення, a і b косинусна і синусна складові, k - номер гармонік потужності. За допомогою чисельних методів рішення систем нелінійних рівнянь розв'язується система рівнянь балансу миттєвих потужностей. За результатами визначають значення електромагнітних параметрів та струмів гілок схеми заміщення АД. В результаті дії ефекту витиснення струму в роторі, знайдений активний опір ротора буде більшим, ніж наводиться в довідкових даних. Тому коефіцієнт що враховує витиснення струму знаходиться з графіка залежності активного роторного опору від сигналу струму ротора відповідно до апроксимаційного виразу 2 4 i 2 R 2 (I2 ) R 20 k R1I2 k R2I2 k RnI2 при різному рівні напруги живлення: При першому рівні напруги живлення: 4 2 R 2 (I2 ) R 20 k R1I2U1 k R2I2U1 k RnIi2U1 . 2 При другому рівні напруги живлення: 4 2 R 2 (I2 ) R 20 k R1I2U2 k R2I2U2 k RnIi2U2 . 2 При третьому рівні напруги живлення: 4 2 R 2 (I2 ) R 20 k R1I2U3 k R2I2U3 k RnIi2U3 . 2 При четвертому рівні напруги живлення: 4 2 R 2 (I2 ) R 20 k R1I2U4 k R2I2U4 k RnIi2U4 . 2 Використовуючи Т-подібну схему заміщення АД (Фіг. 2) і розглядаючи можливість врахування ефекту витиснення струму в роторі через залежність активного опору ротора від роторного струму, використовується наступний вираз: R 2 (I2 ) R 20 k RI2 , 2 тоді отримані вирази для активного опору ротора при різному значенні напруги приймуть, наступний вигляд: R 2 (I2 ) R 20 k RI2U1 ; 2 R 2 (I2 ) R 20 k RI2U2 ; 2 R 2 (I2 ) R 20 k RI2U3 ; 2 30 35 R 2 (I2 ) R 20 k RI2U4 . 2 Використовуючи дані вирази для активного опору ротора, складаються системи рівнянь для визначення R20 та k R . Таким чином для отримання першої системи використовується перший і другий вирази, для другої системи - другий та третій, а для третьої системи - третій та четвертий. За отриманими значеннями k R будується графік залежності k R від струму ротора, з апроксимації якого визначається вираз для залежності k R від I2 . За отриманими електромагнітними параметрами та струмами кіл схеми заміщення визначають пусковий струм, пусковий та критичний моменти, виходячи з яких судять про навантажувальну здатність АД. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 40 45 50 Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів в пускових режимах роботи, який полягає у тому, що двигун підключають до джерела синусоїдальної напруги промислової частоти, вимірюються сигнали напруги та струму статора при номінальній напрузі живлення двигуна, записуються виміряні сигнали напруги та струму в електронну обчислювальну машину та представляються у вигляді тригонометричних рядів, формуються гармонічні складові миттєвої потужності для джерела живлення та елементів схеми заміщення, складається система ідентифікаційних рівнянь з використанням складових миттєвої потужності, вирішується система рівнянь та визначаються електромагнітні параметри асинхронного двигуна, який відрізняється тим, що сигнали напруги та струму статора вимірюються при нерухомому роторі і при декількох значеннях зниженої напруги живлення, при формуванні рівнянь балансу складових миттєвої потужності враховується вплив ефекту витиснення струму як залежність активного опору ротора від роторного струму: R 2 (I2 ) R 20 k RI2 , 2 4 UA 119742 U де R 2 (I2 ) - активний опір ротора, що має залежність від струму ротора, для врахування ефекту витиснення струму; R20 - активний опір без впливу ефекту витіснення струму; I2 - струм ротора; k R - коефіцієнт, що враховує витиснення струму і визначається шляхом апроксимації графіка залежності R 2 (I2 ) . Комп’ютерна верстка А. Крулевський Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: G01R 27/08
Мітки: асинхронних, режимах, пускових, електромагнітних, роботи, спосіб, параметрів, індентифікації, двигунів
Код посилання
<a href="https://ua.patents.su/7-119742-sposib-indentifikaci-elektromagnitnikh-parametriv-asinkhronnikh-dviguniv-v-puskovikh-rezhimakh-roboti.html" target="_blank" rel="follow" title="База патентів України">Спосіб індентифікації електромагнітних параметрів асинхронних двигунів в пускових режимах роботи</a>
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з некоректно заданою інформацією
Номер патенту: 76422
Опубліковано: 10.01.2013
Автори: Ромашихін Юрій Володимирович, Ящук Віталій Валерійович, Чорний Олексій Петрович, Родькін Дмитро Йосипович, Родькін Дмитро Ілліч, Ромашихіна Жанна Іванівна, Загірняк Михайло Васильович
МПК: G01R 27/08
Мітки: параметрів, заданою, некоректно, інформацією, електромагнітних, ідентифікації, асинхронних, спосіб, двигунів
Формула / Реферат:
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з некоректно заданою інформацією, який полягає у підключенні дослідного асинхронного двигуна до джерела напруги через датчики напруги та струму, подачі напруги до асинхронного двигуна, цифрового запису напруги та струму, математичній обробці отриманих результатів, визначенні складових миттєвої потужності, формуванні системи ідентифікаційних рівнянь на основі рівнянь...
Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та струму
Номер патенту: 85325
Опубліковано: 11.11.2013
Автори: Потапов Антон Леонідович, Шнуренко Єгор Анатолійович, Родькін Дмитро Йосипович, Ромашихін Юрій Володимирович, Ромашихіна Жанна Іванівна
МПК: G01R 27/08
Мітки: спосіб, ідентифікації, псевдополігармонічними, електромагнітних, асинхронних, напруги, сигналами, двигунів, струму, параметрів
Формула / Реферат:
1. Спосіб ідентифікації електромагнітних параметрів асинхронних двигунів з псевдополігармонічними сигналами напруги та стуму, що полягає у підключенні дослідного двигуна до джерела синусоїдної напруги з заданим рівнем гармонік через датчики напруги та струму, поданні напруги до двигуна, запису у цифровому вигляді напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні...
Спосіб визначення електромагнітних параметрів асинхронних двигунів
Номер патенту: 58766
Опубліковано: 26.04.2011
Автори: Ромашихін Юрій Володимирович, Мельников Вячеслав Олександрович, Ухань Жанна Іванівна, Калінов Андрій Петрович, Родькін Дмитро Йосипович
МПК: G01R 27/08
Мітки: визначення, спосіб, двигунів, параметрів, асинхронних, електромагнітних
Формула / Реферат:
1. Спосіб визначення електромагнітних параметрів асинхронних двигунів, що полягає у підключенні електричної машини до тиристорного регулятора напруги, живленні обмоток статора полігармонійною напругою, вимірюванні сигналів напруги та струму статора по фазах, запису вимірюваних сигналів напруги та струму в ЕОМ, представленні напруги та струму у вигляді рядів за допомогою перетворення Фур'є, формуванні систем рівнянь із використанням складових...
Спосіб ідентифікації параметрів асинхронних двигунів

Номер патенту: 63928
Опубліковано: 25.10.2011
Автори: Родькін Дмитро Йосипович, Родькін Дмитро Ілліч, Ромашихіна Жанна Іванівна, Ромашихін Юрій Володимирович
МПК: G01R 27/08
Мітки: ідентифікації, спосіб, двигунів, асинхронних, параметрів
Формула / Реферат:
1. Спосіб ідентифікації параметрів асинхронних двигунів, що полягає у підключенні дослідного двигуна до джерела напруги за допомогою датчиків напруги та струму, подаванні напруги до двигуна, цифровому записі напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонійних складових миттєвої потужності фаз, складанні системи ідентифікаційних рівнянь на основі рівнянь...
Спосіб ідентифікації параметрів двигунів змінного струму
Номер патенту: 57650
Опубліковано: 10.03.2011
Автори: Родькін Дмитро Йосипович, Ромашихін Юрій Володимирович
МПК: G01R 27/08
Мітки: струму, змінного, параметрів, ідентифікації, спосіб, двигунів
Формула / Реферат:
Спосіб ідентифікації параметрів двигунів змінного струму, що полягає у підключенні дослідного двигуна до джерела полігармонійної напруги з заданим рівнем гармонік через датчики напруги та струму, подачі напруги до двигуна, цифровому записі напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонійних складових миттєвої потужності фаз, складанні системи...
Попередній патент: Спосіб лікування хворих на псоріаз, поєднаний з артеріальною гіпертензією
Наступний патент: Спосіб діагностики асинхронних двигунів за спектром потужності при живленні від перетворювача частоти
Випадковий патент: Спосіб облицювання схилів каналів із змінним рівнем води