Спосіб визначення електромагнітних параметрів асинхронних двигунів
Номер патенту: 58766
Опубліковано: 26.04.2011
Автори: Ухань Жанна Іванівна, Мельников Вячеслав Олександрович, Калінов Андрій Петрович, Ромашихін Юрій Володимирович, Родькін Дмитро Йосипович
Формула / Реферат
1. Спосіб визначення електромагнітних параметрів асинхронних двигунів, що полягає у підключенні електричної машини до тиристорного регулятора напруги, живленні обмоток статора полігармонійною напругою, вимірюванні сигналів напруги та струму статора по фазах, запису вимірюваних сигналів напруги та струму в ЕОМ, представленні напруги та струму у вигляді рядів за допомогою перетворення Фур'є, формуванні систем рівнянь із використанням складових миттєвої потужності, вирішенні системи рівнянь, який відрізняється тим, що вимірюють значення фазних струмів при номінальній синусоїдальній напрузі, оцінюють зростання величини струму неробочого ходу, визначають наявність гармонік у сигналі струму статора, визначають наявність биття струмів статора із ковзанням ротора, оцінюють несиметрію фазних струмів статора, на основі отриманих даних прогнозують дефекти, у відповідності до прогнозованих дефектів вибирають схему заміщення асинхронного двигуна, у залежності від вибраної схеми заміщення вибирають потрібну чисельність значущих гармонік напруги та струму, при полігармонійному живленні асинхронного двигуна визначають складові гармонік миттєвої потужності джерела полігармонійної напруги та складові гармонік миттєвої потужності для усіх елементів вибраної схеми заміщення при заданій кількості гармонік напруги та струму, для вибраної схеми заміщення складають систему ідентифікаційних рівнянь у вигляді рівності складових гармонік миттєвої потужності джерела полігармонійної напруги сумі складових гармонік миттєвої потужності для усіх елементів схеми заміщення, вирішують систему ідентифікаційних рівнянь, визначають електромагнітні параметри, знаходять складові гармонік струмів кіл схеми заміщення асинхронних двигунів, на основі отриманих електромагнітних параметрів та струмів кіл схеми заміщення визначають пусковий струм, пусковий та критичний моменти, виходячи з яких судять про навантажувальну здатність асинхронних двигунів.
2. Спосіб за п. 1, який відрізняється тим, що систему ідентифікаційних рівнянь складають з канонічних складових гармонік миттєвої потужності, які утворюються при множенні одночастотних складових напруги та струму.
3. Спосіб за п. 1, який відрізняється тим, що систему ідентифікаційних рівнянь складають з неканонічних складових гармонік миттєвої потужності, які утворюються при множенні різночастотних складових напруги та струму.
4. Спосіб за п. 1, який відрізняється тим, що систему ідентифікаційних рівнянь складають у вигляді рівності складових гармонік активної та реактивної потужностей джерела полігармонійної напруги сумі складових гармонік активної та реактивної потужностей для кожного елемента схеми заміщення.
Текст
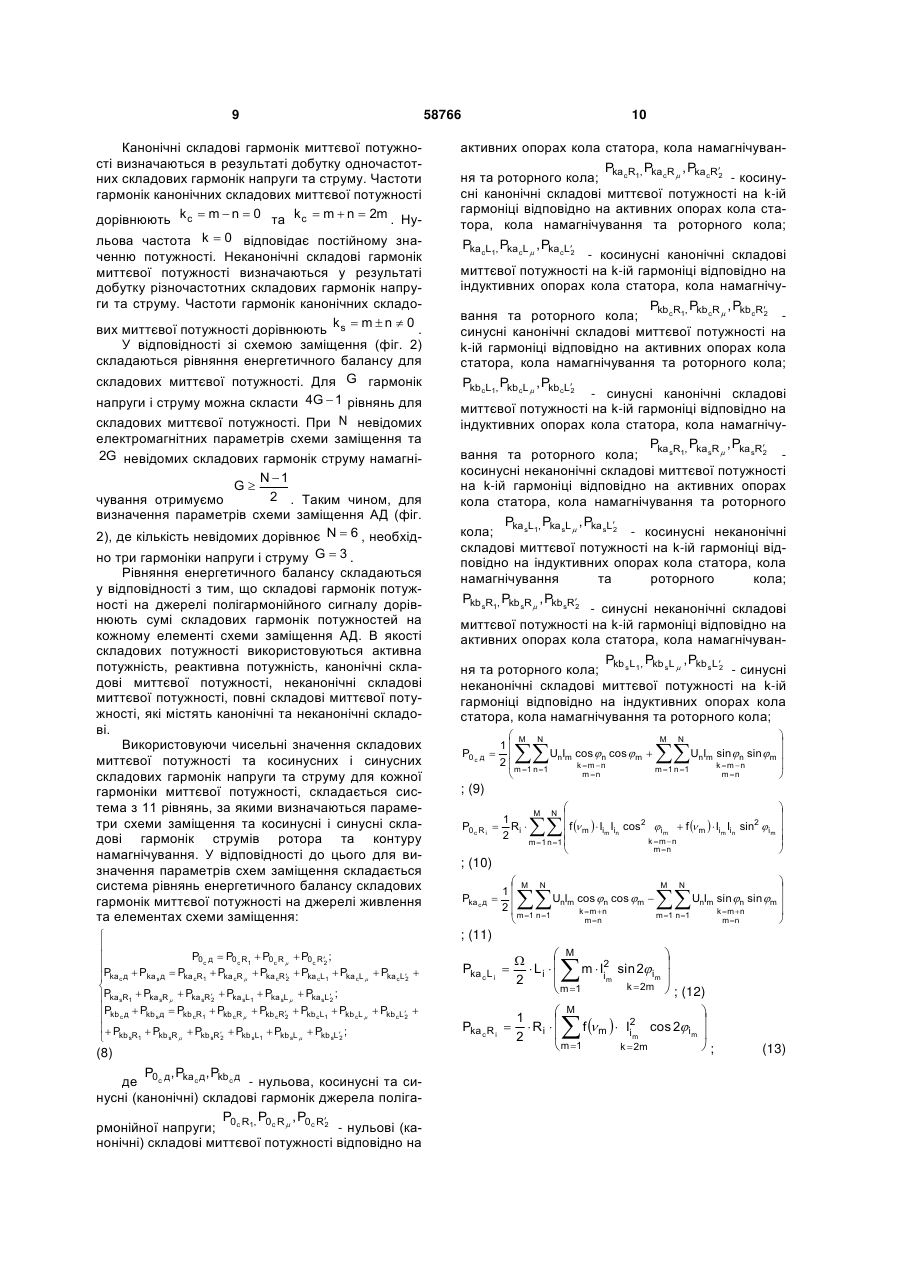
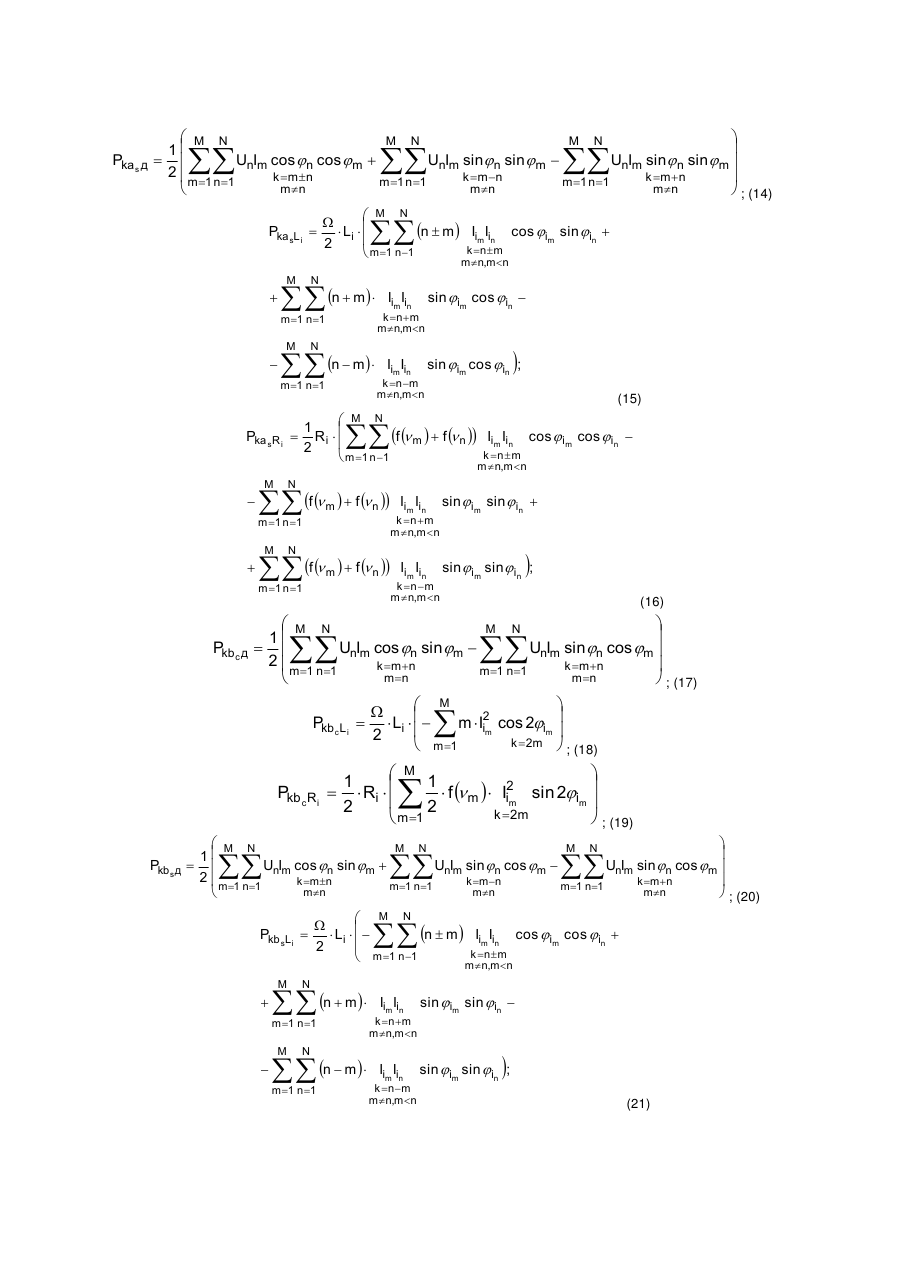
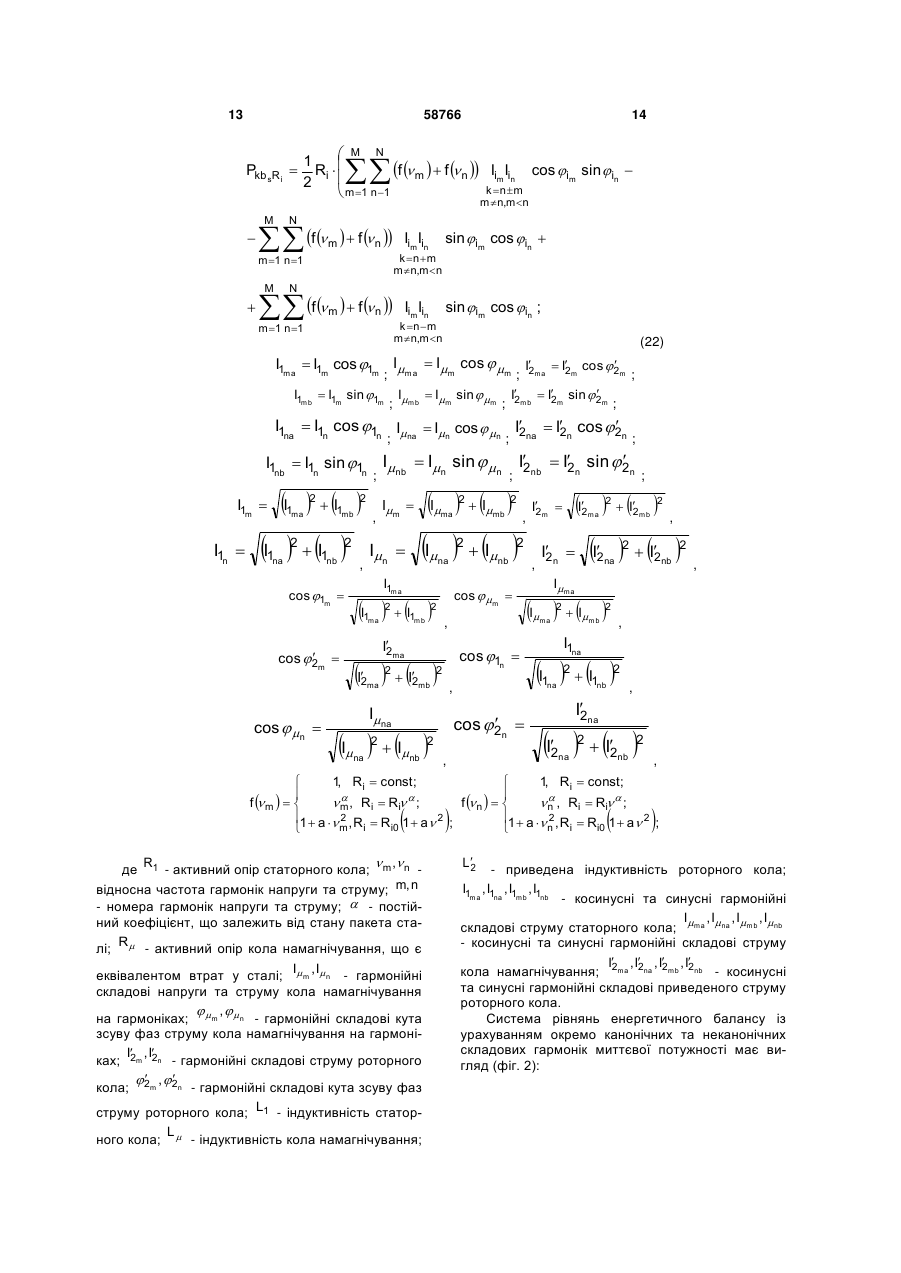
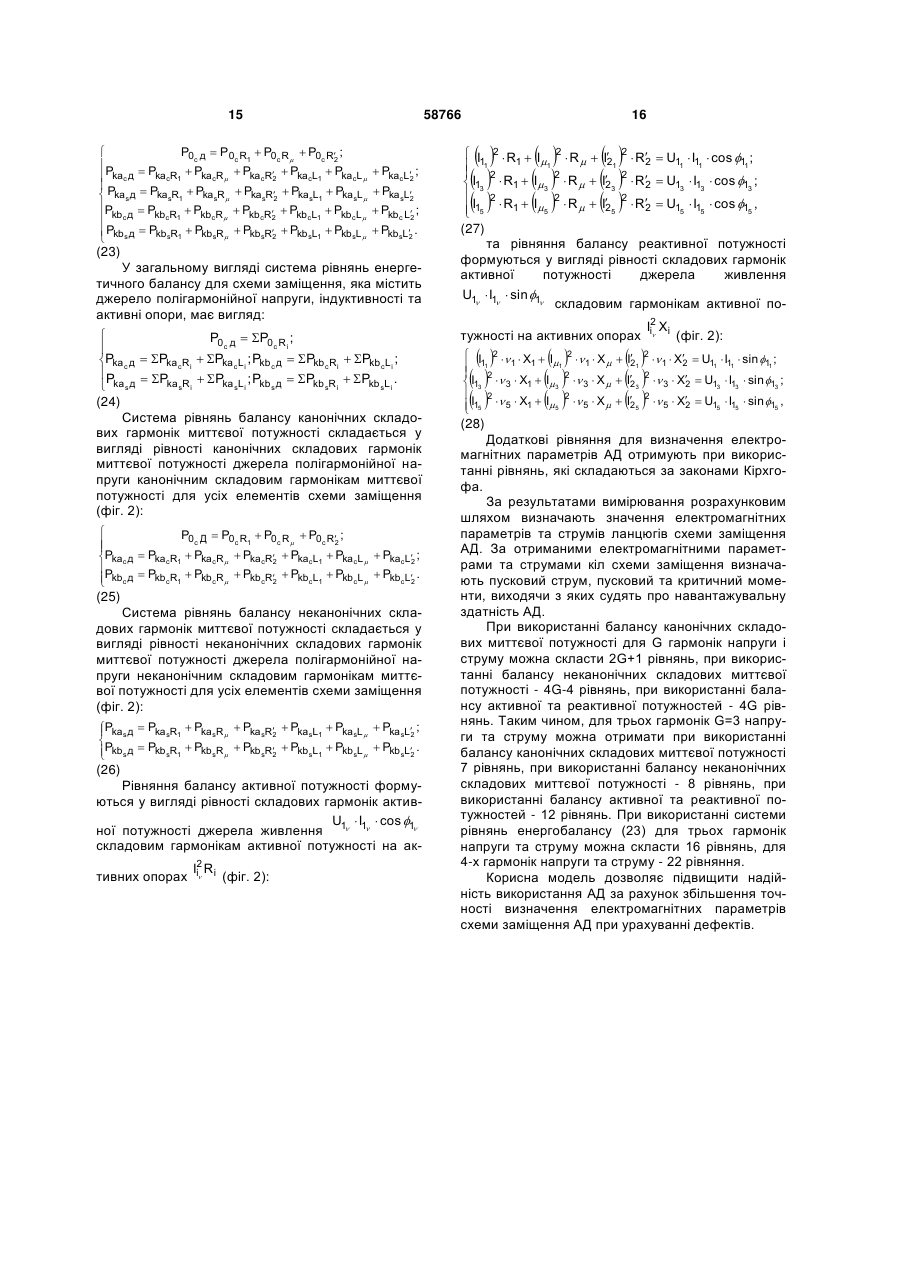
1. Спосіб визначення електромагнітних параметрів асинхронних двигунів, що полягає у підключенні електричної машини до тиристорного регулятора напруги, живленні обмоток статора полігармонійною напругою, вимірюванні сигналів напруги та струму статора по фазах, запису вимірюваних сигналів напруги та струму в ЕОМ, представленні напруги та струму у вигляді рядів за допомогою перетворення Фур'є, формуванні систем рівнянь із використанням складових миттєвої потужності, вирішенні системи рівнянь, який відрізняється тим, що вимірюють значення фазних струмів при номінальній синусоїдальній напрузі, оцінюють зростання величини струму неробочого ходу, визначають наявність гармонік у сигналі струму статора, визначають наявність биття струмів статора із ковзанням ротора, оцінюють несиметрію фазних струмів статора, на основі отриманих даних прогнозують дефекти, у відповідності до прогнозованих дефектів вибирають схему заміщення асинхронного двигуна, у залежності від вибраної схеми заміщення вибирають потрібну чисельність значущих гармонік напруги та струму, при полігармонійному живленні асинхронного двигуна визначають складові гармонік миттєвої поту U 2 (11) 1 3 лючають джерело у момент переходу струму через нуль, вимірюють миттєві значення напруги, що загасає. За отриманими даними розраховують активні та індуктивні опори ротора. Недоліками наведеного способу визначення параметрів є: - низька точність результатів, що обумовлюється неврахуванням опорів, еквівалентних втратам у сталі ротора та статора, ефекту витіснення струму в роторі; - необхідність у розбиранні АД для визначення індуктивного опору розсіювання статора; - розділення операцій по визначенню параметрів двигуна (статора за однією схемою, а ротора за іншою) робить зазначений спосіб малопридатним для практичного визначення параметрів АД. Відомий спосіб визначення параметрів АД [Спосіб діагностики параметрів асинхронного двигуна з короткозамкненим ротором та пристрій для його здійснення: А.С. № 36060А: G01R31/34 / Д. Й. Родькін, А. В. Луговой, О. П. Чорний, Г. Ю. Сисюк, В. В. Добрецов, О. О. Пасмурских, В. В. Долженко, О. М. Вошу; 99105901; опубліковано 16.04.2001, бюл. № 3/2001], який полягає у підключені статорних обмоток до однофазної мережі промислової частоти, вимірюванні напруги, струму та кута зсуву між ними, відключенні статорних обмоток від мережі у момент переходу струму через нуль, виміру остаточної напруги після відключення. Недоліком способу є те, що: - у момент відключення статорних обмоток від мережі індуктивність розсіяння фаз двигуна розраховується з великими похибками; - низький рівень наведеної напруги, що практично не залежить від початкового рівня струму ротора, вносить значні похибки при апроксимації дослідної кривої експоненціальним рядом. Найбільш близьким технічним рішенням до корисної моделі, обраним в якості прототипу до способу, що заявляється, є спосіб [Спосіб діагностики параметрів синхронного двигуна та пристрій для його здійснення: А. С. № 65733 A: G01R31/34 / Д. Й. Родькін, А. П. Калінов, О. П. Чорний, В. Ф. Живора, A. M. Аміров; 2003042860; опубліковано 15.04.2004, бюл. № 4/2004] визначення параметрів двигуна відповідно до Т-подібних схем заміщення двигуна, до яких додаються активні опори контуру взаємоіндукції, що є еквівалентом втрат у сталі, які залежать від частоти гармоніки в ступені . Спосіб полягає у підключенні фаз статорних обмоток двигуна до джерела полігармонійної випробувальної напруги, вимірюванні миттєвих значень фазних струмів і напруг, визначенні їх гармонійного складу, складанні системи рівнянь, порядок якої визначається кількістю невідомих, розрахунку системи рівнянь, визначенні параметрів двигуна. Недоліками наведеного способу визначення параметрів двигунів є: - самостійне вирішення систем рівнянь дає результат, точність якого дуже залежить від кута керування тиристорами і, як наслідок, від співвідношення рівнів гармонік у кривих напруги та струму; - невідповідність рівнянь, які складаються на основі принципу суперпозиції струмів полігармо 58766 4 нійного сигналу, закону збереження енергії, що викликає нестійкість отримуваних рішень; - неврахування ефекту витіснення струму в роторі. В основу корисної моделі поставлено задачу підвищити точність та достовірність визначення електромагнітних параметрів шляхом використання рівнянь балансу складових гармонік миттєвої потужності при живленні від мережі з полігармонійними сигналами, що забезпечує підвищення надійності використання асинхронних двигунів. Згаданий технічний результат при реалізації винаходу досягається тим, що двигун підключають до джерела полігармонійної напруги, вимірюють сигнали напруги та струму статора по фазах, записують виміряні сигнали напруги та струму в ЕОМ, представляють напруги та струму у вигляді рядів за допомогою перетворення Фур'є, складають систему рівнянь з використанням складових миттєвої потужності, вирішують систему рівнянь та визначають електромагнітні параметри двигуна. Згідно з корисною моделлю вимірюють значення фазних струмів при номінальній синусоїдальній напрузі, прогнозують дефекти на основі аналізу фазних струмів статора та обирають схему заміщення та потрібну чисельність значущих гармонік напруги та струму АД, при полігармонійному живленні АД складають систему ідентифікаційних рівнянь у вигляді рівності складових гармонік миттєвої потужності джерела полігармонійної напруги сумі складових гармонік миттєвої потужності для всіх елементів схеми заміщення, вирішують систему ідентифікаційних рівнянь, визначають електромагнітні параметри, знаходять складові гармонік струмів кіл схеми заміщення АД, на основі отриманих електромагнітних параметрів та струмів кіл схеми заміщення визначають пусковий струм, пусковий та критичний моменти, виходячи з яких судять про навантажувальну здатність АД. Запропонований спосіб пояснюється наступними кресленнями, де на фіг. 1. наведений алгоритм визначення електромагнітних параметрів АД; на фіг. 2 наведена Т-подібна схема заміщення АД з урахуванням нелінійності роторного ланцюга, на якій прийнятті позначення: U - напруга живлення I асинхронного двигуна; 1 - струм кола статора; R1 - активний опір кола статора; X1 - індуктивний I опір кола статора; - відносна частота; R струм кола намагнічування; - активний опір X кола намагнічування; - індуктивний опір кола I намагнічування; 2 - струм кола ротора; X 2 приведений індуктивний опір кола ротора; R 2 приведений активний опір кола ротора, який залежить від частоти; на фіг. 3 наведена Т-подібна схема заміщення АД з врахуванням контуру вихрових струмів, на якій прийнятті позначення: RB - активний опір контуру вихрових струмів, який залежить від частоти; XB - індуктивний опір 5 58766 контуру вихрових струмів; R 2 - активний опір кола ротора; на фіг. 4 наведена Т-подібна схема заміщення АД з урахуванням нелінійності ланцюга намагнічування, на якій прийнятті позначення: E - електрорушійна сила, яка враховує не лінійність ланцюга намагнічування; на фіг. 5 наведена трифазна схема заміщення АД, на якій прийнятті P t , PдВ t , PдС t позначення: дА - миттєві потужності джерела полігармонійної напруги фаз А, В, С; PL1A t , PL1B t , PL1C t , PR1A t , PR1B t , PR1C t - миттєві потужності індуктивностей та активних опорів статорного кола фаз А, В, С; PL2 A t , PL2B t , PL2C t , PR2 A t , PR2B t , PR2C t - миттєві потужності індуктивностей та активних опорів роторного кола фаз А, В, С; PBA t , PBB t , PBC t , PГA t , PГB t , PГC t - миттєві по тужності, які враховують втрати від вихрових струмів та гістерезису фаз А, В, С; PJA t , PJB t , PJC t , PMA t , PMB t , PMC t - миттєві потужності механічної частини АД фаз А, В, С; на фіг. 6 наведені миттєві значення напруги, струму та потужності фази нерухомого АД, на якій прийнятті позначення: ut - миттєві значення напруги фази нерухомого АД; it - миттєві значення струму фази нерухомого АД; pt - миттєві значення потужності фази нерухомого АД. Спосіб здійснюється наступним чином (фіг. 1): АД підключають до мережі промислової частоти через джерело полігармонійної напруги, у якості якого може виступати або джерело з чітко фіксо 6 ваною кількістю та рівнем гармонік, або джерело із нескінченною кількістю гармонік та кінцевою кількістю значущих гармонік. В останньому випадку можуть аналізуватися як група із G гармонік, ближчих до основної (1,3,...,2G-1), так і інші групи зі значущими гармоніками (3,5,...,2G+1, або 5,7,...,2G+3 і т.п.). Фізично, у якості джерела полігармонійної напруги можуть бути використані тиристорні регулятори напруги або перетворювачі частоти зі складними законами керування. На початку випробування АД підключають до джерела синусоїдальної номінальної напруги. Вимірюють струми статора АД. Аналізують сигнали фазних струмів статора, а саме фіксують зростання струму неробочого ходу, визначають наявність гармонік в сигналі струму статора, визначають наявність биття струмів статора з ковзанням ротора, оцінюють несиметрію фазних струмів статора. На основі аналізу сигналів фазних струмів статора прогнозують дефекти (таблиця 1). За наявності зростання величини струму неробочого ходу визначають місцеві замикання між окремими листами активної сталі. Такі дефекти призводять до зростання вихрових струмів. Наявність гармонік у сигналі струму статора вказують на наявність нелінійності у контурі намагнічування, тобто спостерігається зміна властивостей сталі внаслідок збільшення гістерезисних втрат. Пошкодження ротора (обрив стрижнів, приховані дефекти лиття), підвищений ексцентриситет ротора (статичний або динамічний) призводять до биття струмів статора з ковзанням ротора. При несиметрії фазних струмів статора АД мають місце механічні дефекти, порушення величини повітряного зазору, виткові замикання, несиметричні опори за фазами. Таблиця 1 Діагностичні ознаки АД Діагностичні ознаки Дефект Зростання величини струму Місцеві замикання між окремими листами активної сталі, які неробочого ходу призводять до зростання вихрових струмів Наявність гармонік в сигналі Порушення властивостей сталі (зміна кривої намагнічування, струму статора збільшення гістерезисних втрат) Струм стаНаявність биття струмів стаПошкодження ротора (обрив стрижнів, приховані дефекти тора тора з частотою ковзання ролиття), підвищений ексцентриситет ротора (статичний або тора динамічний) Несиметрія фазних струмів Механічні дефекти, порушення величини повітряного зазору, статора виткові замикання, несиметричні опори за фазами На основі аналізу фазних струмів статора у відповідності до прогнозованих дефектів обирають схему заміщення АД. Кожному виду дефектів ставиться у відповідність схема заміщення. Т-подібна схема заміщення при постійному значенні активного опору роторного кола, яка містить статорне коло, коло намагнічування та роторне коло (фіг. 2), використовується для визначення електромагнітних параметрів АД, які не містять дефектів. У випадку, якщо виявлено дефекти, використовують схеми заміщення, приведені на фіг. 3 - фіг. 5. Особливостями схеми заміщення (фіг. 3) є наявність двох паралельних ланцюгів, один з яких враховує вихрові струми. Контур вихрових струмів містить активний опір та індуктивність, які увімкнені паралельно колу намагнічування. Нелінійність кривої намагнічування враховується у вигляді електрорушійної сили кола намагнічування (фіг. 4). Електрорушійна сила дорівнює похідній добутку струму на нелінійну індуктивність: d d d e t L t i t L t i t i t L t dt dt dt , (1) 7 де L t k 58766 dФ i 2 2p 1 3 3 i t 2p 1 p i t dt ; k - коефіцієнт, який враховує конструктивні осоФ i бливості двигуна; - залежність магнітного потоку від струму кола намагнічування, яка враховує нелінійність кривої намагнічування; 1, 3 , , p - постійні коефіцієнти, які визначаютьi t ся при апроксимації кривої намагнічування; струм намагнічування, який проходить через нелінійну індуктивність; p - номер гармоніки нелінійної індуктивності. Биття струмів статора із частотою ковзання ротора для загальнопромислових АД враховується введенням нелінійного активного опору (фіг. 2), який залежить від частоти R2 R20 1 a , де R - опір роторного кола постійному струму, a 20 постійний коефіцієнт, що враховує збільшення активного опору ротора за рахунок ефекту витіснення струму на вищих гармоніках. Коефіцієнт визначається дослідним шляхом із похибкою ±5 % за допомогою апроксимації кривої RKЗ R1 , де 2 RKЗ - дійсна складова повного комплексного опору фази двигуна у режимі однофазного короткого замикання. Дефекти, які призводять до несиметричних режимів роботи АД, враховуються завдяки використанню трифазної схеми заміщення за допомогою діаграми потужностей (фіг. 5). Діаграма потужностей враховує потужність мас, що рухаються, та моменту опору при обертальному русі: PM t Mст t ; PJ t 1 2 dJt d t t Jt t 2 dt dt , де Mст - залежність статичного моменту від швидкості; t - залежність кутової швидкості від часу; Jt - залежність моменту інерції від часу. На основі аналізу прогнозованих дефектів вибирають схему заміщення АД. У режимі короткого замикання, при нерухомому роторі, по черзі на кожну фазу підключається полігармонійна напруга, вимірюються значення напруг та струмів статора АД, визначаються за допомогою перетворення Фур'є синусні й косинусні складові напруг і струмів: ut N it ; (2) M I m m 0 n - кут зсуву фаз між напругою та віссю, яка приймається за нульове положення векторів (при цьому приймається, що вектор першої гармоніки напруги співпадає з віссю, тобто 1 0 ); Im - амп літудні значення складових гармонік струму; m номер гармоніки струму; M - число гармонік струму; m - кут зсуву фаз між напругою та струмом. Найпростіші математичні перетворення дозволяють представити напругу та струм у вигляді: ut cosmt m , (3) Un - амплітудні значення складових гармоде нік напруги; n - номер гармоніки напруги; N - число гармонік напруги; - кругова частота мережі; N U cosnt na n 0 it N U sinnt nb n 0 M I ; (4) M ma cos mt m 0 Imb sinmt m 0 , (5) Una Un cosn , Ima Im cosm - косинусні де гармонійні складові напруги та струму; Unb Un sinn , Imb Im sinm - синусні гармонійні складові напруги та струму. Залежно від обраної схеми заміщення обирають потрібну чисельність значущих гармонік напруги та струму, яка визначається відповідно до невідомих параметрів схеми заміщення. Невідомими є електромагнітні параметри (активні та індуктивні опори) та струми кіл схеми заміщення (струми ланцюга намагнічування та роторного ланцюга). Миттєва потужність визначається як добуток напруги та струму (фіг. 2): pt ut it . Миттєва потужність з урахуванням косинусних та синусних складових гармонік напруги та струму: pt 1 2 1 2 1 2 1 2 M N U na m 1 n 1 M N Ima Unb Imb cosm nt U Ima Unb Imb cosm nt U Imb Unb Ima sinm nt U Imb Unb Ima sinm nt . na m 1 n 1 M N na m 1 n 1 M N na m 1 n 1 (6) Миттєва потужність дорівнює сумі активної P0 , косинусних Pka t та синусних Pkb t складових: pt Un cosnt n n 0 8 MN 0 MN Pk 0 k 1 Pka t MN P kb t k 1 , (7) k - номер гармоніки миттєвої потужності. де Сумарне значення гармонік k-го порядку миттєвої потужності Pk визначається у формі сум k-х P P канонічних k c та неканонічних k s складових: Pk Pk c Pk s 9 Канонічні складові гармонік миттєвої потужності визначаються в результаті добутку одночастотних складових гармонік напруги та струму. Частоти гармонік канонічних складових миттєвої потужності дорівнюють k c m n 0 та k c m n 2m . Нульова частота k 0 відповідає постійному значенню потужності. Неканонічні складові гармонік миттєвої потужності визначаються у результаті добутку різночастотних складових гармонік напруги та струму. Частоти гармонік канонічних складових миттєвої потужності дорівнюють k s m n 0 . У відповідності зі схемою заміщення (фіг. 2) складаються рівняння енергетичного балансу для складових миттєвої потужності. Для G гармонік напруги і струму можна скласти 4G 1 рівнянь для складових миттєвої потужності. При N невідомих електромагнітних параметрів схеми заміщення та 2G невідомих складових гармонік струму намагніN 1 2 . Таким чином, для чування отримуємо визначення параметрів схеми заміщення АД (фіг. 2), де кількість невідомих дорівнює N 6 , необхідG но три гармоніки напруги і струму G 3 . Рівняння енергетичного балансу складаються у відповідності з тим, що складові гармонік потужності на джерелі полігармонійного сигналу дорівнюють сумі складових гармонік потужностей на кожному елементі схеми заміщення АД. В якості складових потужності використовуються активна потужність, реактивна потужність, канонічні складові миттєвої потужності, неканонічні складові миттєвої потужності, повні складові миттєвої потужності, які містять канонічні та неканонічні складові. Використовуючи чисельні значення складових миттєвої потужності та косинусних і синусних складових гармонік напруги та струму для кожної гармоніки миттєвої потужності, складається система з 11 рівнянь, за якими визначаються параметри схеми заміщення та косинусні і синусні складові гармонік струмів ротора та контуру намагнічування. У відповідності до цього для визначення параметрів схем заміщення складається система рівнянь енергетичного балансу складових гармонік миттєвої потужності на джерелі живлення та елементах схеми заміщення: P0c д P0c R1 P0c R P0c R2 ; Pka c д Рka s д Pka cR1 Pka cR Pka cR2 Pka cL1 Pka cL Pka cL2 Pka sR1 Pka sR Pka sR2 Pka sL1 Pka sL Pka sL2 ; Pkb д Pkb д Pkb R Pkb R Pkb R Pkb L Pkb L Pkb L s c 1 c c 2 c 1 c c 2 c Pkb R Pkb R Pkb R Pkb L Pkb L Pkb L ; s 1 s s 2 s 1 s s 2 (8) P ,P ,P де 0c д ka c д kb c д - нульова, косинусні та синусні (канонічні) складові гармонік джерела полігаP0c R1, P0c R , P0c R2 рмонійної напруги; - нульові (канонічні) складові миттєвої потужності відповідно на 58766 10 активних опорах кола статора, кола намагнічуванPka cR1, Pka cR , Pka cR2 ня та роторного кола; - косинусні канонічні складові миттєвої потужності на k-ій гармоніці відповідно на активних опорах кола статора, кола намагнічування та роторного кола; PkacL1, PkacL , PkacL2 - косинусні канонічні складові миттєвої потужності на k-ій гармоніці відповідно на індуктивних опорах кола статора, кола намагнічуPkb cR1, Pkb cR , Pkb cR2 вання та роторного кола; синусні канонічні складові миттєвої потужності на k-ій гармоніці відповідно на активних опорах кола статора, кола намагнічування та роторного кола; PkbcL1, PkbcL , PkbcL2 - синусні канонічні складові миттєвої потужності на k-ій гармоніці відповідно на індуктивних опорах кола статора, кола намагнічуPka sR1, Pka sR , Pka sR2 вання та роторного кола; косинусні неканонічні складові миттєвої потужності на k-ій гармоніці відповідно на активних опорах кола статора, кола намагнічування та роторного Pka sL1, Pka sL , Pka sL2 кола; - косинусні неканонічні складові миттєвої потужності на k-ій гармоніці відповідно на індуктивних опорах кола статора, кола намагнічування та роторного кола; Pkb sR1, Pkb sR , Pkb sR2 - синусні неканонічні складові миттєвої потужності на k-ій гармоніці відповідно на активних опорах кола статора, кола намагнічуванPkb sL1, Pkb sL , Pkb sL2 ня та роторного кола; - синусні неканонічні складові миттєвої потужності на k-ій гармоніці відповідно на індуктивних опорах кола статора, кола намагнічування та роторного кола; P0 c д M N M N 1 UnIm cos n cos m UnIm sinn sinm 2 k m n k m n m 1 n 1 m n m n m 1 n 1 ; (9) P0 c R i 1 Ri 2 f m Ii Ii cos 2 i f m Ii Ii sin2 i m n m m n m k m n m 1 n 1 m n M N ; (10) Pka c д M N M N 1 UnIm cos n cos m UnIm sin n sin m 2 k mn k mn m1 n1 mn mn m1 n1 ; (11) Pka c L i M Li m Ii2 sin 2 im m 2 k 2m m 1 ; (12) Pka c R i M 1 Ri f m Ii2 cos 2 im m 2 k 2m m 1 ; (13) Pka s д M N M N M N 1 UnIm cos n cos m UnIm sinn sinm UnIm sin n sinm 2 k m n k m n k m n m 1 n 1 m 1 n 1 mn mn mn m 1 n 1 ; (14) Pka sLi M N n m IimIin cos im sin in Li 2 k n m m 1 n1 m n,mn M N n m m 1 n 1 M Iim Iin sin im k n m m n,mn cos in N n m m 1 n 1 Iim Iin sin im cos in k n m m n,mn ; (15) 1 f m f n Iim Iin cos im cos in Ri 2 k n m m 1 n 1 M N Pka sR i m n,m n M N f m f n Iim Iin sin im k n m m n,m n sin in m f n Iim Iin sin im k n m m n,m n sin in ; m 1 n 1 M N f m 1 n 1 Pkb c д (16) M N M N 1 UnIm cos n sin m UnIm sin n cos m 2 k mn k mn m1 n1 mn mn m1 n1 ; (17) Pkb cLi Pkb cRi Pkb s д M Li m Ii2 cos 2im m 2 k 2m m1 ; (18) M 1 1 Ri f m Ii2 sin 2im m 2 2 k 2m m1 ; (19) M N M N M N 1 UnIm cos n sin m UnIm sin n cos m UnIm sin n cos m 2 k mn k mn k mn m1 n1 m1 n1 m n m n m n m1 n1 ; (20) Pkb sLi M N n m IimIin cos im cos in Li 2 k n m m 1 n1 m n,mn M N n m m 1 n 1 M Iim Iin sin im k n m m n,mn sin in N n m m 1 n 1 Iim Iin sin im sin in k n m m n,mn ; (21) 13 58766 Pkb sRi 14 M N 1 f m f n Iim Iin cos im sin in Ri 2 k n m m 1 n 1 m n,mn M N f m f n Iim Iin sin im k n m m n,mn cos in m f n Iim Iin sin im k n m m n,mn cos in ; m 1 n 1 M N f m 1 n 1 (22) I1ma I1m cos 1m Ima Im cos m I2ma I2m cos 2m ; I1mb I1m sin 1m Imb Im sin m ; ; ; I sin 2 I2mb 2m m ; I1na I1n cos 1n Ina In cos n I na I n cos 2n 2 2 ; ; ; ; I1nb I1n sin 1n Inb In sin n I nb I n sin 2n 2 2 ; ; ; I1m I1n I1 2 I1 2 , I ma mb I1 2 I1 2 , I na nb cos 1m n mb na I1 I1 2 mb nb cos m 2 I2 2 I2 2 , cos 1n I 2 I 2 nb n ma cos 2n mb I2 2 I2 2 , na I 2 I 2 , mb I1na I1 2 I1 2 nb , I na 2 I2 2 I2 2 na , nb Ima na mb Ina I2 2 I2 2 , ma , I ma 2 na m I 2 I 2 , I2 I1ma ma cos n ma ma cos 2m I 2 I 2 , I2 m nb , 1 Ri const; , 1 Ri const; , f m m, Ri Ri ; f n n , Ri Ri ; 1 a 2 , R R 1 a 2 ; 1 a 2, R R 1 a 2 ; m i i0 n i i0 де R1 - активний опір статорного кола; m , n відносна частота гармонік напруги та струму; m, n - номера гармонік напруги та струму; - постійний коефіцієнт, що залежить від стану пакета стаR лі; - активний опір кола намагнічування, що є I ,I еквівалентом втрат у сталі; m n - гармонійні складові напруги та струму кола намагнічування , на гармоніках; m n - гармонійні складові кута зсуву фаз струму кола намагнічування на гармоніI , I ках; 2m 2n - гармонійні складові струму роторного , кола; 2m 2n - гармонійні складові кута зсуву фаз струму роторного кола; L1 - індуктивність статорного кола; L - індуктивність кола намагнічування; L2 - приведена індуктивність роторного кола; I1ma , I1na , I1mb , I1nb - косинусні та синусні гармонійні I ,I ,I ,I складові струму статорного кола; ma na mb nb - косинусні та синусні гармонійні складові струму I , I , I , I кола намагнічування; 2ma 2na 2mb 2nb - косинусні та синусні гармонійні складові приведеного струму роторного кола. Система рівнянь енергетичного балансу із урахуванням окремо канонічних та неканонічних складових гармонік миттєвої потужності має вигляд (фіг. 2): 15 P0c д Р0с R1 P0c R P0c R2 ; Pka c д Pka cR1 Pka cR Pka cR2 Pka cL1 Pka cL P ka s д Pka sR1 Pka sR Pka sR2 Pka sL1 Pka sL P Pkb cR1 Pkb cR Pkb cR2 Pkb cL1 Pkb cL kb c д Pkb s д Pkb sR1 Pkb sR Pkb sR2 Pkb sL1 Pkb sL 58766 Pka cL2 ; Pka sL2 Pkb c L2 ; Pkb sL2 . (23) У загальному вигляді система рівнянь енергетичного балансу для схеми заміщення, яка містить джерело полігармонійної напруги, індуктивності та активні опори, має вигляд: P0c д P0c Ri ; Pka c д Pka cRi Pka cLi ; Pkb c д Pkb cRi Pkb cLi ; P ka s д Pka sRi Pka sLi ; Pkb s д Pkb sRi Pkb sLi . (24) Система рівнянь балансу канонічних складових гармонік миттєвої потужності складається у вигляді рівності канонічних складових гармонік миттєвої потужності джерела полігармонійної напруги канонічним складовим гармонікам миттєвої потужності для усіх елементів схеми заміщення (фіг. 2): P0c Д P0c R1 P0c R P0c R2 ; Pka c д Pka cR1 Pka cR Pka cR2 Pka cL1 Pka cL Pka cL2 ; P kb c д Pkb cR1 Pkb cR Pkb cR2 Pkb cL1 Pkb cL Pkb cL2 . (25) Система рівнянь балансу неканонічних складових гармонік миттєвої потужності складається у вигляді рівності неканонічних складових гармонік миттєвої потужності джерела полігармонійної напруги неканонічним складовим гармонікам миттєвої потужності для усіх елементів схеми заміщення (фіг. 2): Pka s д Pka sR1 Pka sR Pka sR2 Pka sL1 Pka sL Pka sL2 ; P kb s д Pkb sR1 Pkb sR Pkb sR2 Pkb sL1 Pkb sL Pkb sL2 . (26) Рівняння балансу активної потужності формуються у вигляді рівності складових гармонік активU I cos 1 ної потужності джерела живлення 1 1 складовим гармонікам активної потужності на активних опорах Ii2 Ri (фіг. 2): 16 I 2 R I 2 R I 2 R U I cos ; 1 1 21 2 11 11 11 11 2 I13 R1 I 3 2 R I 3 2 R U13 I13 cos 13 ; 2 2 2 I15 R1 I 5 2 R I 5 2 R U15 I15 cos 15 , 2 2 (27) та рівняння балансу реактивної потужності формуються у вигляді рівності складових гармонік активної потужності джерела живлення U1 I1 sin 1 складовим гармонікам активної по тужності на активних опорах Ii2 Xi (фіг. 2): 1 X2 U1 I1 sin 1 ; 2 3 X2 U1 I1 sin 1 ; 2 5 X2 U1 I1 sin 1 , I 2 X I 2 X I 1 1 1 1 21 11 2 2 I13 3 X1 I 3 3 X I 3 2 2 2 2 I15 5 X1 I 5 5 X I 5 2 1 1 1 3 3 3 5 5 5 (28) Додаткові рівняння для визначення електромагнітних параметрів АД отримують при використанні рівнянь, які складаються за законами Кірхгофа. За результатами вимірювання розрахунковим шляхом визначають значення електромагнітних параметрів та струмів ланцюгів схеми заміщення АД. За отриманими електромагнітними параметрами та струмами кіл схеми заміщення визначають пусковий струм, пусковий та критичний моменти, виходячи з яких судять про навантажувальну здатність АД. При використанні балансу канонічних складових миттєвої потужності для G гармонік напруги і струму можна скласти 2G+1 рівнянь, при використанні балансу неканонічних складових миттєвої потужності - 4G-4 рівнянь, при використанні балансу активної та реактивної потужностей - 4G рівнянь. Таким чином, для трьох гармонік G=3 напруги та струму можна отримати при використанні балансу канонічних складових миттєвої потужності 7 рівнянь, при використанні балансу неканонічних складових миттєвої потужності - 8 рівнянь, при використанні балансу активної та реактивної потужностей - 12 рівнянь. При використанні системи рівнянь енергобалансу (23) для трьох гармонік напруги та струму можна скласти 16 рівнянь, для 4-х гармонік напруги та струму - 22 рівняння. Корисна модель дозволяє підвищити надійність використання АД за рахунок збільшення точності визначення електромагнітних параметрів схеми заміщення АД при урахуванні дефектів. 17 Комп’ютерна верстка І.Скворцова 58766 Підписне 18 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of electromagnetic parameters of asynchronous motors
Автори англійськоюRomashykhin Yurii Volodymyrovych, Kalinov Andrii Petrovych, Ukhan Zhanna Ivanivna, Melnykov Viacheslav Oleksandrovych
Назва патенту російськоюСпособ определения электромагнитных параметров асинхронных двигателей
Автори російськоюРомашихин Юрий Владимирович, Калинов Андрей Петрович, Ухань Жанна Ивановна, Мельников Вячеслав Александрович
МПК / Мітки
МПК: G01R 27/08
Мітки: параметрів, електромагнітних, асинхронних, двигунів, визначення, спосіб
Код посилання
<a href="https://ua.patents.su/9-58766-sposib-viznachennya-elektromagnitnikh-parametriv-asinkhronnikh-dviguniv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення електромагнітних параметрів асинхронних двигунів</a>
Спосіб ідентифікації параметрів двигунів змінного струму
Номер патенту: 57650
Опубліковано: 10.03.2011
Автори: Ромашихін Юрій Володимирович, Родькін Дмитро Йосипович
МПК: G01R 27/08
Мітки: двигунів, спосіб, параметрів, змінного, струму, ідентифікації
Формула / Реферат:
Спосіб ідентифікації параметрів двигунів змінного струму, що полягає у підключенні дослідного двигуна до джерела полігармонійної напруги з заданим рівнем гармонік через датчики напруги та струму, подачі напруги до двигуна, цифровому записі напруг та струмів фаз, математичній обробці отриманих результатів шляхом розкладу кривих напруги та струму в ряд Фур'є, визначенні гармонійних складових миттєвої потужності фаз, складанні системи...
Спосіб визначення електромагнітних параметрів машин змінного струму
Номер патенту: 51956
Опубліковано: 10.08.2010
Автори: Воробейчик Олег Станіславович, Калінов Андрій Петрович, Рєзнік Дмитро Володимирович
МПК: G01R 27/28
Мітки: спосіб, електромагнітних, визначення, параметрів, машин, струму, змінного
Формула / Реферат:
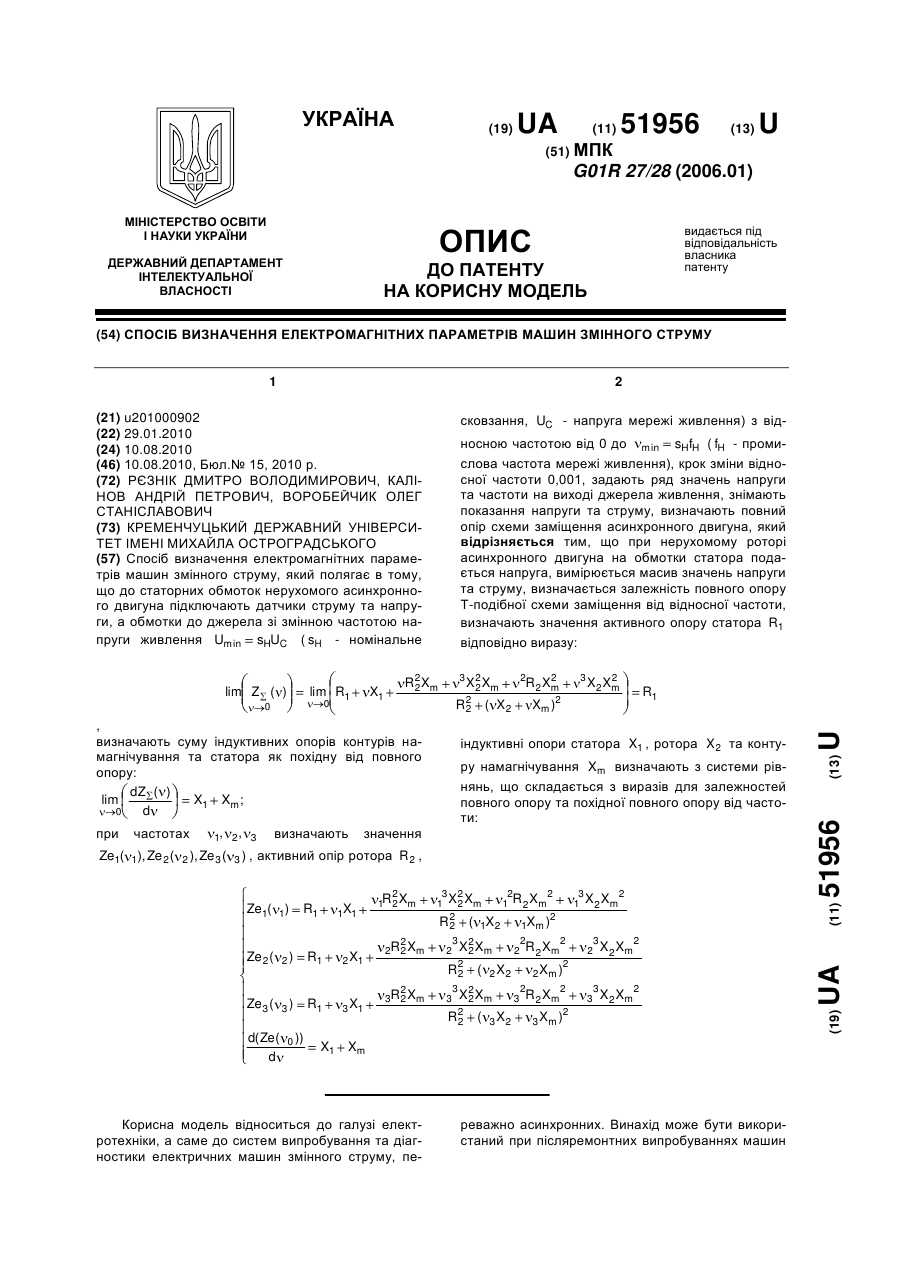
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення ( - номінальне сковзання,
Спосіб визначення електромагнітних параметрів машин змінного струму
Номер патенту: 43931
Опубліковано: 10.09.2009
Автори: Рєзнік Олена Анатоліївна, Родькін Дмитро Йосипович, Калінов Андрій Петрович, Рєзнік Дмитро Володимирович, Воробейчик Олег Станіславович
МПК: G01R 27/28
Мітки: електромагнітних, струму, визначення, спосіб, машин, змінного, параметрів
Формула / Реферат:
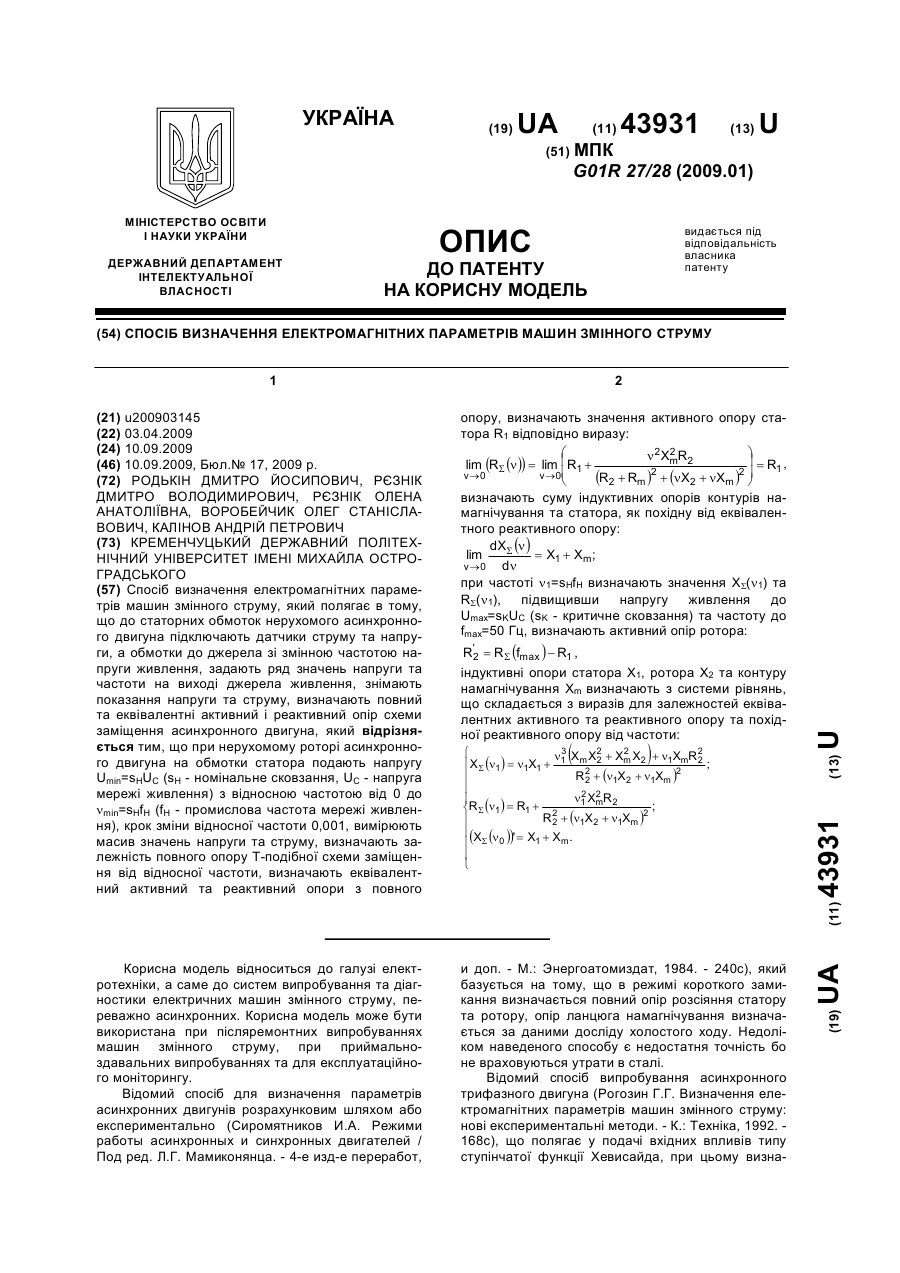
Спосіб визначення електромагнітних параметрів машин змінного струму, який полягає в тому, що до статорних обмоток нерухомого асинхронного двигуна підключають датчики струму та напруги, а обмотки до джерела зі змінною частотою напруги живлення, задають ряд значень напруги та частоти на виході джерела живлення, знімають показання напруги та струму, визначають повний та еквівалентні активний і реактивний опір схеми заміщення асинхронного...
Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів

Номер патенту: 42582
Опубліковано: 10.07.2009
Автори: Воробейчик Олег Станіславович, Урдін Ігор Володимирович, Топчієнко Юрій Анатолійович, Козакевич Ігор Аркадійович
МПК: G01R 31/34, H02K 15/00
Мітки: ротора, асинхронних, індуктивностей, визначення, спосіб, взаємних, опорів, власних, активних, двигунів, статора
Формула / Реферат:
Спосіб визначення активних опорів, власних і взаємних індуктивностей статора й ротора асинхронних двигунів, що включає реєстрацію реально діючих в асинхронному двигуні сигналів й обчислення по розрахункових формулах параметрів асинхронного двигуна, який відрізняється тим, що реєстрацію реально діючих в асинхронному двигуні сигналів здійснюють у режимах його робочого функціонування з наступною обробкою сигналів; при цьому як реально діючі в...
Спосіб визначення інтервальних коефіцієнтів корисної дії асинхронних двигунів
Номер патенту: 12517
Опубліковано: 15.02.2006
Автори: Поджаренко Володимир Олександрович, Гоменюк Дмитро Анатолійович
МПК: G01L 3/00
Мітки: визначення, двигунів, спосіб, асинхронних, коефіцієнтів, корисної, дії, інтервальних
Формула / Реферат:
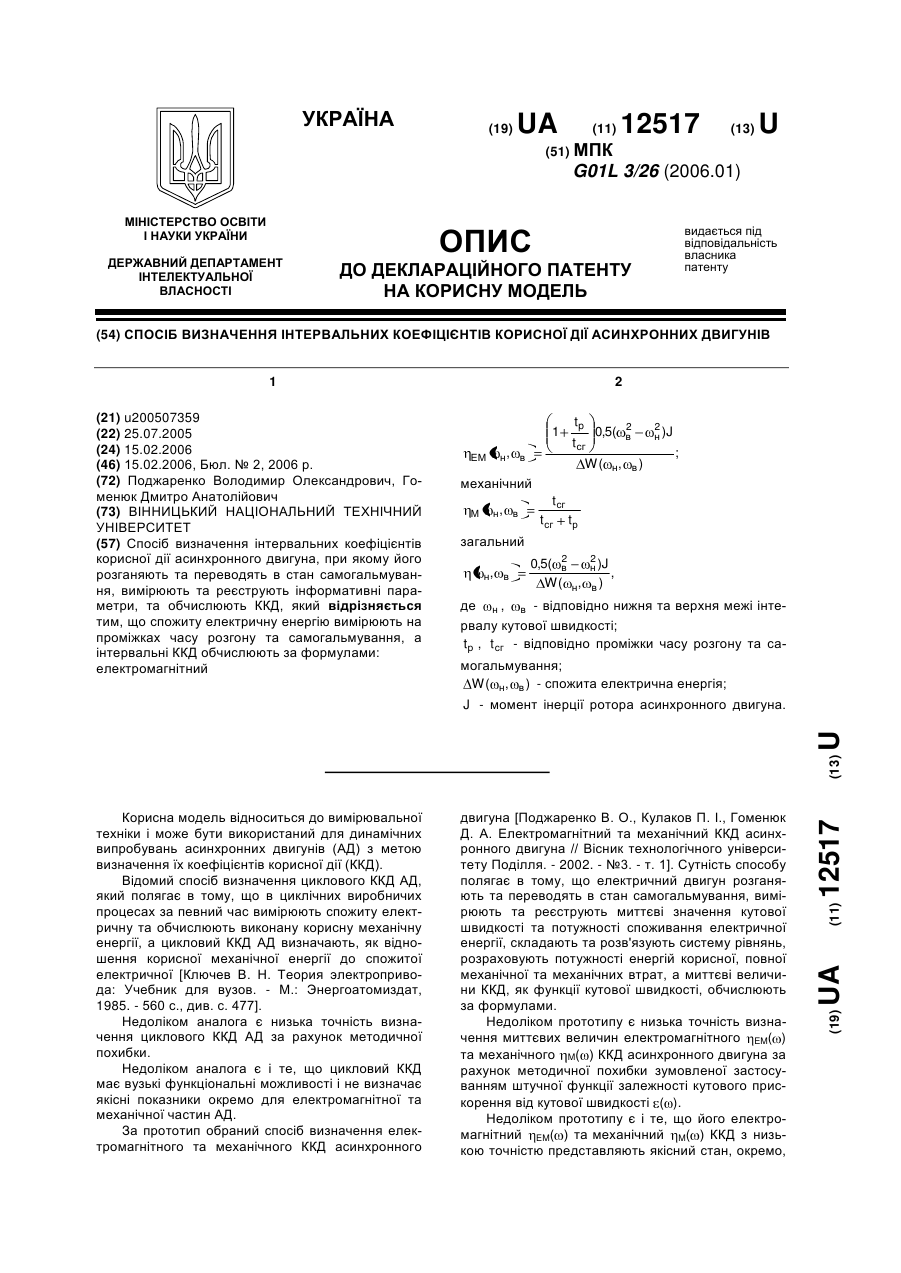
Спосіб визначення інтервальних коефіцієнтів корисної дії асинхронного двигуна, при якому його розганяють та переводять в стан самогальмування, вимірюють та реєструють інформативні параметри, та обчислюють ККД, який відрізняється тим, що спожиту електричну енергію вимірюють на проміжках часу розгону та самогальмування, а інтервальні ККД обчислюють за формулами:електромагнітний
Попередній патент: Спосіб лікування хронічного алкогольного стеатогепатиту
Наступний патент: Спосіб фіксації внутрішньошкірного косметичного шва у хворих з надмірно розвинутою підшкірною клітковиною
Випадковий патент: Регенеративний резонансний транзисторний підсилювач