Спосіб гасіння пожежі мобільним пожежним роботом
Номер патенту: 121077
Опубліковано: 27.11.2017
Автори: Абрамов Юрій Олексійович, Тищенко Євгеній Олександрович, Собина Віталій Олександрович
Формула / Реферат
1. Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають параметри вогнища загоряння, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот до цього вогнища і контролюють його параметри, який відрізняється тим, що орієнтують лафетний ствол мобільного пожежного робота на вогнище загоряння, вимірюють відстань до вогнища загоряння, по величині якої визначають кутове положення лафетного ствола в вертикальній площині, що проходить через вогнище загоряння, і яке забезпечує попадання вогнегасної речовини до вогнища загоряння, встановлюють лафетний ствол в це кутове положення, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот у бік вогнища загоряння, при цьому стабілізують положення лафетного ствола мобільного пожежного робота в азимуті таким чином, щоб лафетний ствол був направлений убік вогнища загоряння, безперервно вимірюють відстань до вогнища загоряння, по величині якої корегують кутове положення лафетного ствола мобільного пожежного робота в вертикальній площині, яка проходить через вогнище загоряння.
2. Спосіб гасіння пожежі мобільним пожежним роботом по п. 1, який відрізняється тим, що кутове положення лафетного ствола в вертикальній площині, яка проходить через вогнище загоряння, визначають кутом, який є коренем трансцендентного рівняння, що має вигляд
 ,
,
де ![]() - початкова швидкість подачі вогнегасної речовини лафетним стволом;
- початкова швидкість подачі вогнегасної речовини лафетним стволом; ![]() - прискорення сили тяжіння;
- прискорення сили тяжіння; ![]() - перевищення лафетного ствола над рівнем землі;
- перевищення лафетного ствола над рівнем землі; ![]() - кут між напрямом лафетного ствола та горизонтальною площиною;
- кут між напрямом лафетного ствола та горизонтальною площиною; ![]() - відстань від мобільного пожежного робота до вогнища загоряння.
- відстань від мобільного пожежного робота до вогнища загоряння.
Текст
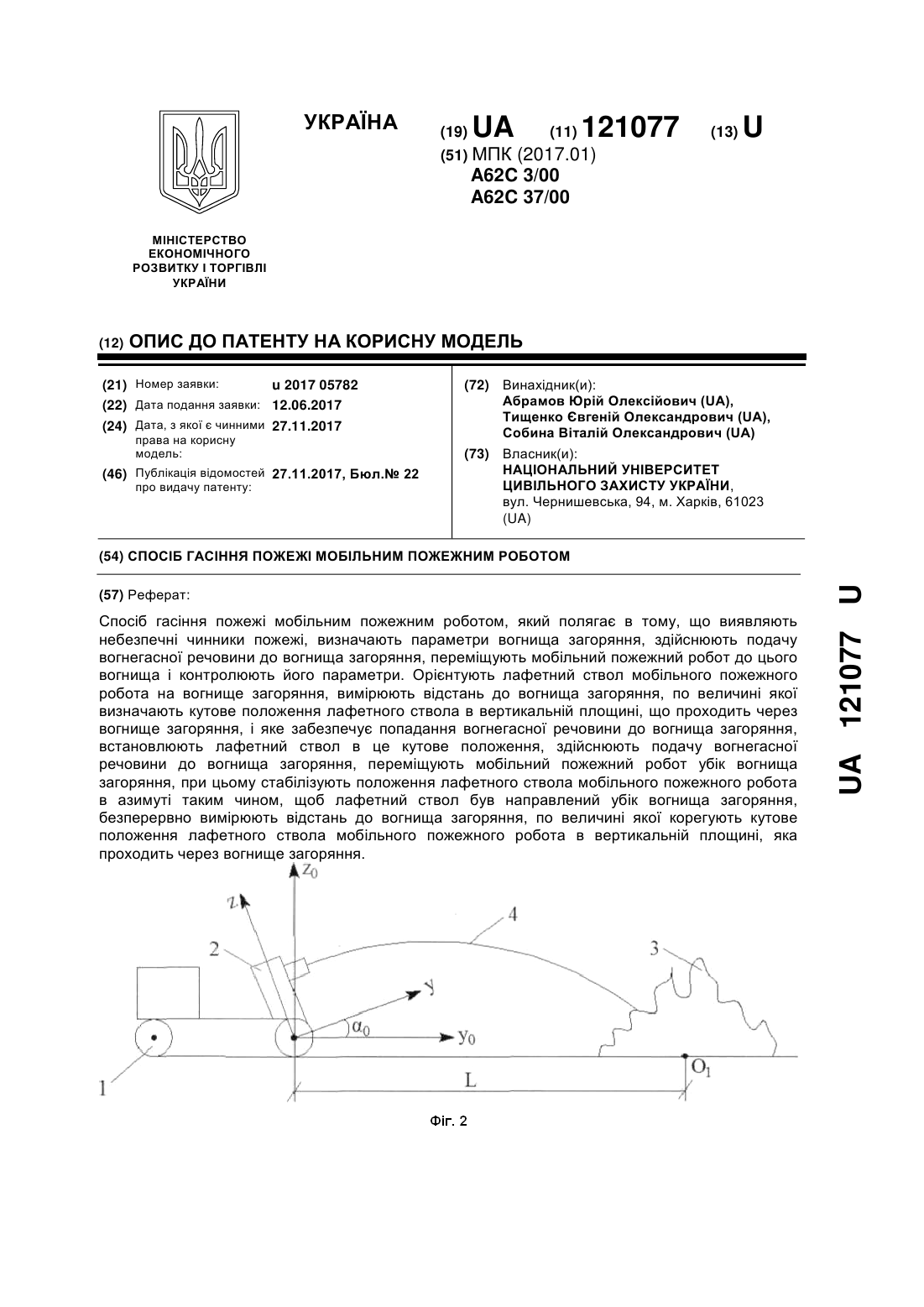
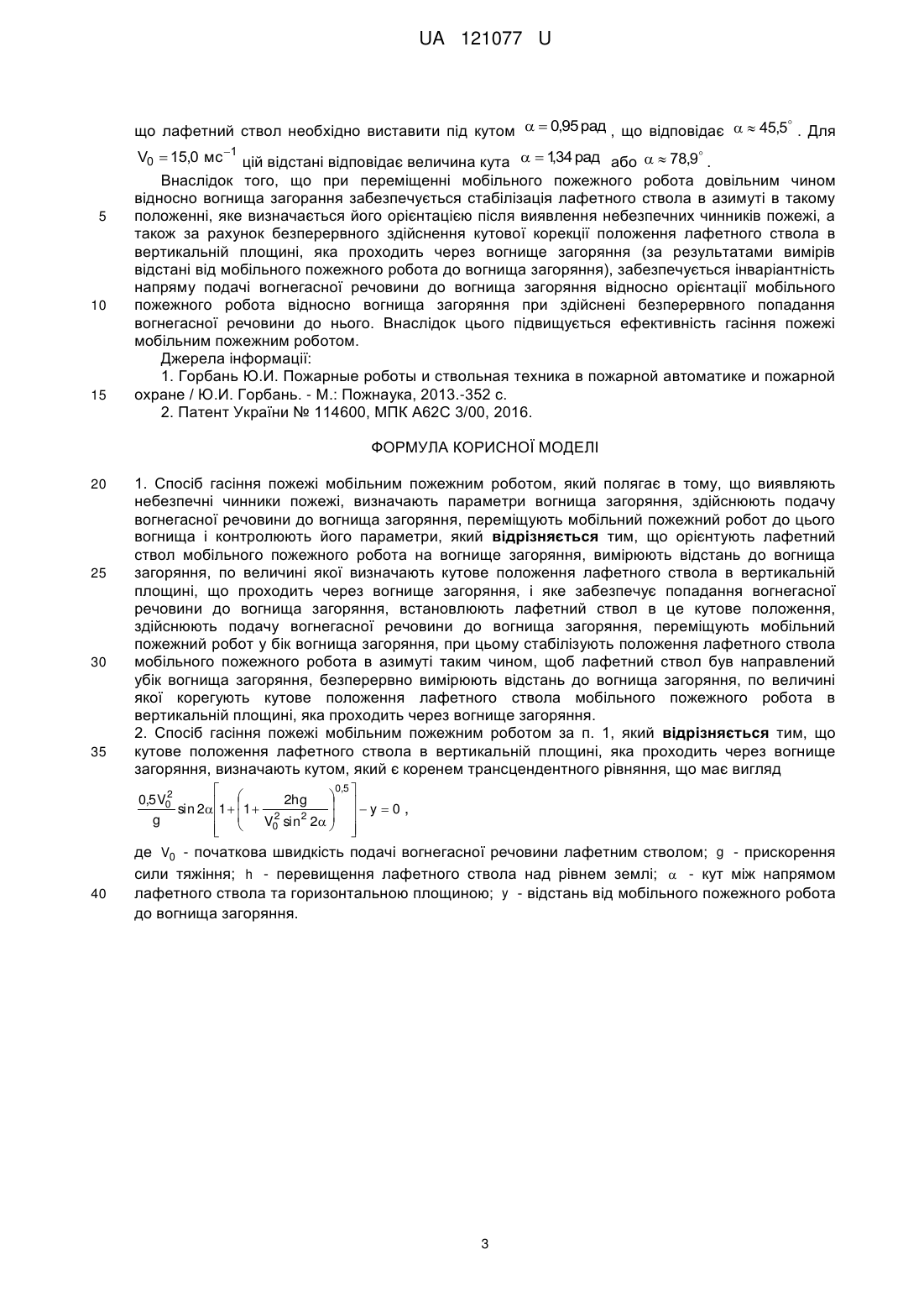
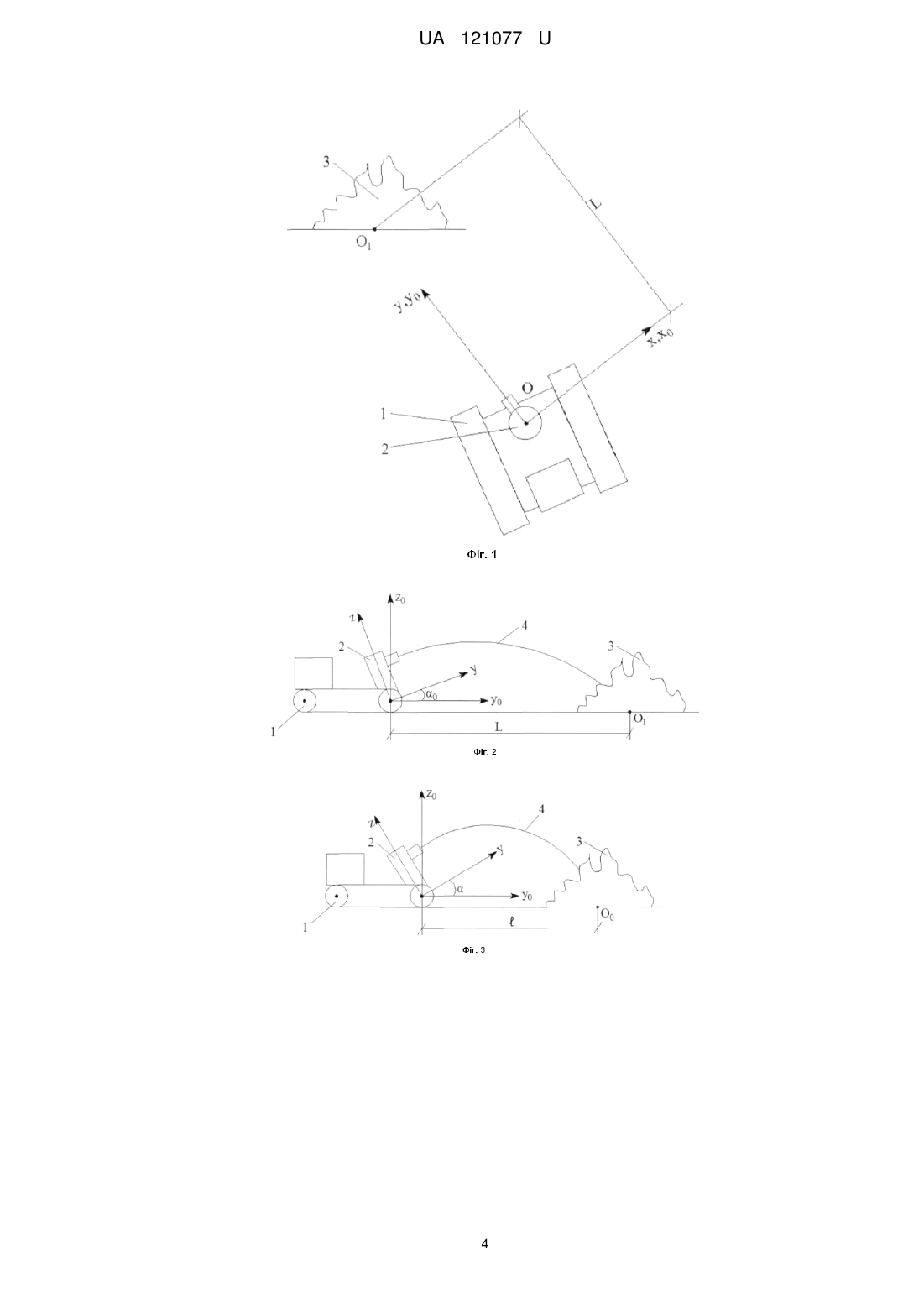
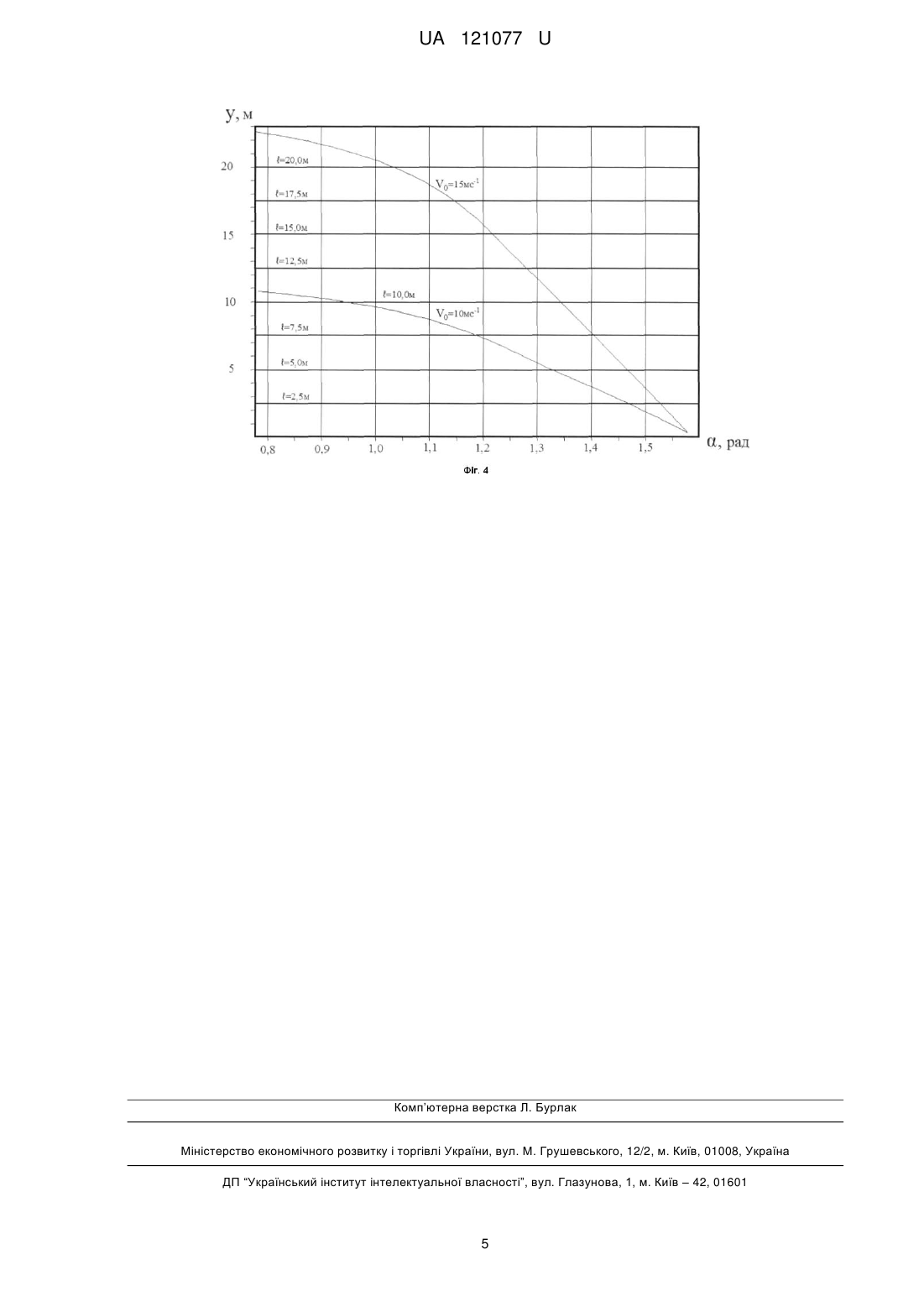
Реферат: Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають параметри вогнища загоряння, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот до цього вогнища і контролюють його параметри. Орієнтують лафетний ствол мобільного пожежного робота на вогнище загоряння, вимірюють відстань до вогнища загоряння, по величині якої визначають кутове положення лафетного ствола в вертикальній площині, що проходить через вогнище загоряння, і яке забезпечує попадання вогнегасної речовини до вогнища загоряння, встановлюють лафетний ствол в це кутове положення, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот убік вогнища загоряння, при цьому стабілізують положення лафетного ствола мобільного пожежного робота в азимуті таким чином, щоб лафетний ствол був направлений убік вогнища загоряння, безперервно вимірюють відстань до вогнища загоряння, по величині якої корегують кутове положення лафетного ствола мобільного пожежного робота в вертикальній площині, яка проходить через вогнище загоряння. UA 121077 U (54) СПОСІБ ГАСІННЯ ПОЖЕЖІ МОБІЛЬНИМ ПОЖЕЖНИМ РОБОТОМ UA 121077 U UA 121077 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області гасіння пожеж із використанням мобільних пожежних роботів. Відомий спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу вогнища загоряння та відстань до нього, переміщують мобільний пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до вогнища загоряння [1, стор. 261-262]. Недоліком цього способу гасіння пожежі є те, що при його реалізації ефективність гасіння низька, що обумовлено не в повній мірі використанням вогнегасної речовини. Найбільш близьким до способу, що заявляється, є спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до нього, переміщують мобільний пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до вогнища загоряння, контролюють величину теплового потоку від вогнища загоряння, порівнюють цю величину із апріорі заданою, при наявності неузгодженості між ними переміщують мобільний пожежний робот до усунення цієї неузгодженості, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, а його амплітуду адаптують до площі вогнища загоряння [2]. Недоліком цього способу гасіння пожежі мобільним пожежним роботом є те, що максимальний ефект від реалізації способу може бути досягнутий при умові орієнтації мобільного пожежного робота таким чином, щоб його повздовжня вісь була направлена на вогнище загоряння. Це можливо здійснити лише при пересуванні мобільного пожежного робота строго за напрямом, який співпадає із напрямом на вогнище загоряння, що не завжди реалізуємо (внаслідок відсутності під'їзних колій). В основу технічного рішення поставлена задача стосовно забезпечення інваріантності напряму подачі вогнегасної речовини до вогнища загоряння відносно орієнтації мобільного пожежного робота відносно вогнища загоряння за умови безперервного попадання вогнегасної речовини до нього, внаслідок чого підвищується ефективність гасіння пожежі. Поставлена задача вирішується тим, що в способі гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають параметри вогнища загоряння, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот до цього вогнища і контролюють його параметри, додатково орієнтують лафетний ствол мобільного пожежного робота на вогнище загоряння, вимірюють відстань до вогнища загоряння, по величині якої визначають кутове положення лафетного ствола в вертикальній площині, що проходить через вогнище загоряння, і яке забезпечує попадання вогнегасної речовини до вогнища загоряння, встановлюють лафетний ствол мобільного пожежного робота в це кутове положення, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот убік вогнища загоряння, при цьому стабілізують положення лафетного ствола мобільного пожежного робота в азимуті таким чином, щоб лафетний ствол був направлений убік вогнища загоряння, безперервно вимірюють відстань до вогнища загоряння, по величині якої корегують кутове положення лафетного ствола мобільного пожежного робота в вертикальній площині, яка проходить через вогнище загоряння. Кутове положення лафетного ствола мобільного пожежного робота в вертикальній площині, яка проходить через вогнище загоряння, визначають кутом, який є коренем трансцендентного рівняння, що має вигляд 0,5 2 0,5V0 2hg y 0 sin 2 1 1 2 g V0 sin2 2 (1) де V0 - початкова швидкість подачі вогнегасної речовини лафетним стволом; g прискорення сили тяжіння; h - перевищення лафетного ствола над рівнем землі; - кут між напрямом лафетного ствола та горизонтальною площиною; y - відстань від мобільного пожежного робота до вогнища загоряння. На фіг. 1 наведена схема початкового розташування мобільного пожежного робота відносно вогнища загоряння (вигляд зверху), де зображено: 1 - мобільний пожежний робот; 2 - лафетний ствол мобільного пожежного робота; 3 - вогнище загоряння; L - початкова відстань від мобільного пожежного робота 1 до вогнища загоряння 3 (L=001); Оzуz - система координат, що пов'язана із лафетним стволом 2; Ox0y0z0 - система координат, осі якої Ох0 та Оу0 лежать в горизонтальній площині. На фіг. 2 та на фіг. 3 наведені схеми, які пояснюють процес гасіння пожежі мобільним пожежним роботом, що розташований відповідно на відстані y L та 1 UA 121077 U 5 10 15 20 y L від вогнища загоряння (вид збоку), де зображено: 1 - мобільний пожежний робот; 2 лафетний ствол мобільного пожежного робота; 3 - вогнище загоряння; 4 - струмінь вогнегасної речовини; Oxyz - система координат, що пов'язана із лафетним стволом 2; Ox0y0z0 - система координат, вісь якої Оу0 направлена горизонтально, а вісь Oz0 - перпендикулярно до вісі Оу0; 0 - кут нахилу лафетного ствола 2, який забезпечує попадання вогнегасної речовини до вогнища загоряння 3 при відстані, що дорівнює величині L; - кут нахилу лафетного ствола 2, який забезпечує попадання вогнегасної речовини до вогнища загоряння 3 при відстані, що дорівнює величині . На фіг. 4 наведена номограма для визначення величини кута α при заданих величинах відстані від мобільного пожежного робота до вогнища загоряння та початкової швидкості V0 подачі вогнегасної речовини лафетним стволом. Спосіб гасіння пожежі мобільним пожежним роботом здійснюється наступним чином. При виявленні небезпечних чинників пожежі здійснюють орієнтацію лафетного ствола 2 мобільного пожежного робота 1 (фіг. 1) на вогнище загоряння 3 і вимірюють відстань до нього у=L де L=001. Для попадання вогнегасної речовини до вогнища загоряння 3 визначають кутове положення лафетного ствола 2 в вертикальній площині, яка проходить через вогнище загоряння 3, тобто кут 0 (фіг. 2). Внаслідок того, що струмінь вогнегасної речовини 4 має траєкторію, яка описується виразом 0,5g y h tg x x 2 , (2) 2 V0 cos 2 де g - прискорення сили тяжіння; h - перевищення лафетного ствола 2 над рівнем землі; V0 - початкова швидкість подачі вогнегасної речовини лафетним стволом; - кут між напрямом лафетного ствола 2 та горизонтальною площиною (напрямом Оу0), то із (2) витікає трансцендентне рівняння для визначення кута 0 , яке має вигляд 0,5g 2 V0 cos2 0 L2 tg 0 L h 0 , (3) Після розв'язання цього рівняння відносно L як більшого кореня можна записати 25 30 35 40 0,5 2 0,5V0 2hg 1 1 L 0 , (4) sin 2 0 2 g V0 sin 2 2 0 Це трансцендентне рівняння використовують для визначення величини кута 0 при заданих параметрах V0 , h та L . Після визначення величини а0 лафетний ствол 2 встановлюють в це кутове положення (фіг. 2), здійснюють подачу вогнегасної речовини, яка за траєкторією 4 буде попадати до вогнища загоряння 3, і переміщують мобільний пожежний робот 1 у бік вогнища загоряння 3. При переміщенні мобільного пожежного робота 1 забезпечують стабілізацію в азимуті положення лафетного ствола 2 таким чином, щоб він був направлений убік вогнища загоряння 3. Одночасно із переміщенням мобільного пожежного робота 1 безперервно вимірюють відстань до вогнища загоряння 3, по величині якої корегують кутове положення, тобто величину кута лафетного ствола 2 мобільного пожежного робота 1 в вертикальній площині, яка проходить через вогнище загоряння 3 (фіг. 3). Скореговану величину кута а визначають як корінь трансцендентного рівняння, яке має вигляд (4), де замість 0 слід використовувати , а замість L - у, тобто 0,5 2 0,5V0 2hg y 0 . (5) sin 2 1 1 2 g V0 sin2 2 y - відстань від мобільного пожежного робота 1 до вогнища загоряння 3. В цьому рівнянні Для визначення величини кута на фіг. 4 наведена номограма, яка побудована для V0 10,0 мс 1 та V0 15,0 мс 1 , а також при y , де 2,5 20,0 м із кроком 2,5 м. Приклад. В результаті виміру відстані від мобільного пожежного робота до вогнища 1 загоряння одержана величина y 10,0м . При V0 10,0 мс із номограми на фіг. 4 витікає, 2 UA 121077 U що лафетний ствол необхідно виставити під кутом 0,95 рад , що відповідає 45,5 . Для 5 10 15 V0 15,0 мс 1 цій відстані відповідає величина кута 134 рад або 78,9 . , Внаслідок того, що при переміщенні мобільного пожежного робота довільним чином відносно вогнища загорання забезпечується стабілізація лафетного ствола в азимуті в такому положенні, яке визначається його орієнтацією після виявлення небезпечних чинників пожежі, а також за рахунок безперервного здійснення кутової корекції положення лафетного ствола в вертикальній площині, яка проходить через вогнище загоряння (за результатами вимірів відстані від мобільного пожежного робота до вогнища загоряння), забезпечується інваріантність напряму подачі вогнегасної речовини до вогнища загоряння відносно орієнтації мобільного пожежного робота відносно вогнища загоряння при здійснені безперервного попадання вогнегасної речовини до нього. Внаслідок цього підвищується ефективність гасіння пожежі мобільним пожежним роботом. Джерела інформації: 1. Горбань Ю.И. Пожарные роботы и ствольная техника в пожарной автоматике и пожарной охране / Ю.И. Горбань. - М.: Пожнаука, 2013.-352 с. 2. Патент України № 114600, МПК А62С 3/00, 2016. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 30 35 1. Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають параметри вогнища загоряння, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот до цього вогнища і контролюють його параметри, який відрізняється тим, що орієнтують лафетний ствол мобільного пожежного робота на вогнище загоряння, вимірюють відстань до вогнища загоряння, по величині якої визначають кутове положення лафетного ствола в вертикальній площині, що проходить через вогнище загоряння, і яке забезпечує попадання вогнегасної речовини до вогнища загоряння, встановлюють лафетний ствол в це кутове положення, здійснюють подачу вогнегасної речовини до вогнища загоряння, переміщують мобільний пожежний робот у бік вогнища загоряння, при цьому стабілізують положення лафетного ствола мобільного пожежного робота в азимуті таким чином, щоб лафетний ствол був направлений убік вогнища загоряння, безперервно вимірюють відстань до вогнища загоряння, по величині якої корегують кутове положення лафетного ствола мобільного пожежного робота в вертикальній площині, яка проходить через вогнище загоряння. 2. Спосіб гасіння пожежі мобільним пожежним роботом за п. 1, який відрізняється тим, що кутове положення лафетного ствола в вертикальній площині, яка проходить через вогнище загоряння, визначають кутом, який є коренем трансцендентного рівняння, що має вигляд 0,5 2 0,5 V0 2hg 1 1 y 0 , sin 2 2 g V0 sin2 2 40 де V0 - початкова швидкість подачі вогнегасної речовини лафетним стволом; g - прискорення сили тяжіння; h - перевищення лафетного ствола над рівнем землі; - кут між напрямом лафетного ствола та горизонтальною площиною; y - відстань від мобільного пожежного робота до вогнища загоряння. 3 UA 121077 U 4 UA 121077 U Комп’ютерна верстка Л. Бурлак Міністерство економічного розвитку і торгівлі України, вул. М. Грушевського, 12/2, м. Київ, 01008, Україна ДП “Український інститут інтелектуальної власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
МПК / Мітки
МПК: A62C 37/00, A62C 3/00
Мітки: пожежним, роботом, спосіб, гасіння, мобільним, пожежі
Код посилання
<a href="https://ua.patents.su/7-121077-sposib-gasinnya-pozhezhi-mobilnim-pozhezhnim-robotom.html" target="_blank" rel="follow" title="База патентів України">Спосіб гасіння пожежі мобільним пожежним роботом</a>
Спосіб гасіння пожежі мобільним пожежним роботом
Номер патенту: 114600
Опубліковано: 10.03.2017
Автори: Кривцова Валентина Іванівна, Собина Віталій Олександрович, Абрамов Юрій Олексійович
МПК: A62C 3/00
Мітки: гасіння, мобільним, пожежі, роботом, спосіб, пожежним
Формула / Реферат:
Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу вогнища загоряння та відстань до нього, переміщують пожежний робот в робочу позицію і здійснюють подачу вогнегасної речовини до вогнища загоряння, який відрізняється тим, що контролюють величину теплового потоку від вогнища загоряння, порівнюють цю величину із апріорі заданою, при наявності...
Спосіб гасіння пожежі мобільним роботом
Номер патенту: 119615
Опубліковано: 25.09.2017
Автори: Рибка Євгеній Олексійович, Поспєлов Борис Борисович, Дейнеко Наталя Вікторівна, Андронов Володимир Анатолійович
Мітки: пожежі, гасіння, роботом, мобільним, спосіб
Формула / Реферат:
Спосіб гасіння пожежі мобільним пожежним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, контролюють величину теплового потоку від осередку горіння, порівнюють з величиною, яка відповідає граничним тепловим характеристикам мобільного робота, при наявності неузгодженості між ними змінюють положення робота до усунення цієї неузгодженості, переміщують робот в...
Спосіб гасіння пожежі мобільним роботом
Номер патенту: 120390
Опубліковано: 25.10.2017
Автори: Дейнеко Наталя Вікторівна, Андронов Володимир Анатолійович, Рибка Євгеній Олексійович, Поспєлов Борис Борисович
МПК: A62C 37/00, A62C 3/00
Мітки: гасіння, мобільним, роботом, спосіб, пожежі
Формула / Реферат:
Спосіб гасіння пожежі мобільним роботом, який полягає в тому, що виявляють небезпечні чинники пожежі, визначають координати, площу загоряння та відстань до неї, здійснюють подачу вогнегасної речовини до осередку горіння, змінюють кут розпилу вогнегасної речовини циклічно в горизонтальній площині, амплітуду кута розпилу вогнегасної речовини адаптують до площі вогнища загоряння, який відрізняється тим, що вимірюють та контролюють температуру...
Лафетний ствол для гасіння пожежі
Номер патенту: 68121
Опубліковано: 15.07.2004
Автори: Гуліда Едуард Миколайович, Панів Ярослав Володимирович, Козяр Михайло Миколайович, Павлюк Юрій Емільович
МПК: A62C 31/00
Мітки: ствол, лафетний, гасіння, пожежі
Формула / Реферат:
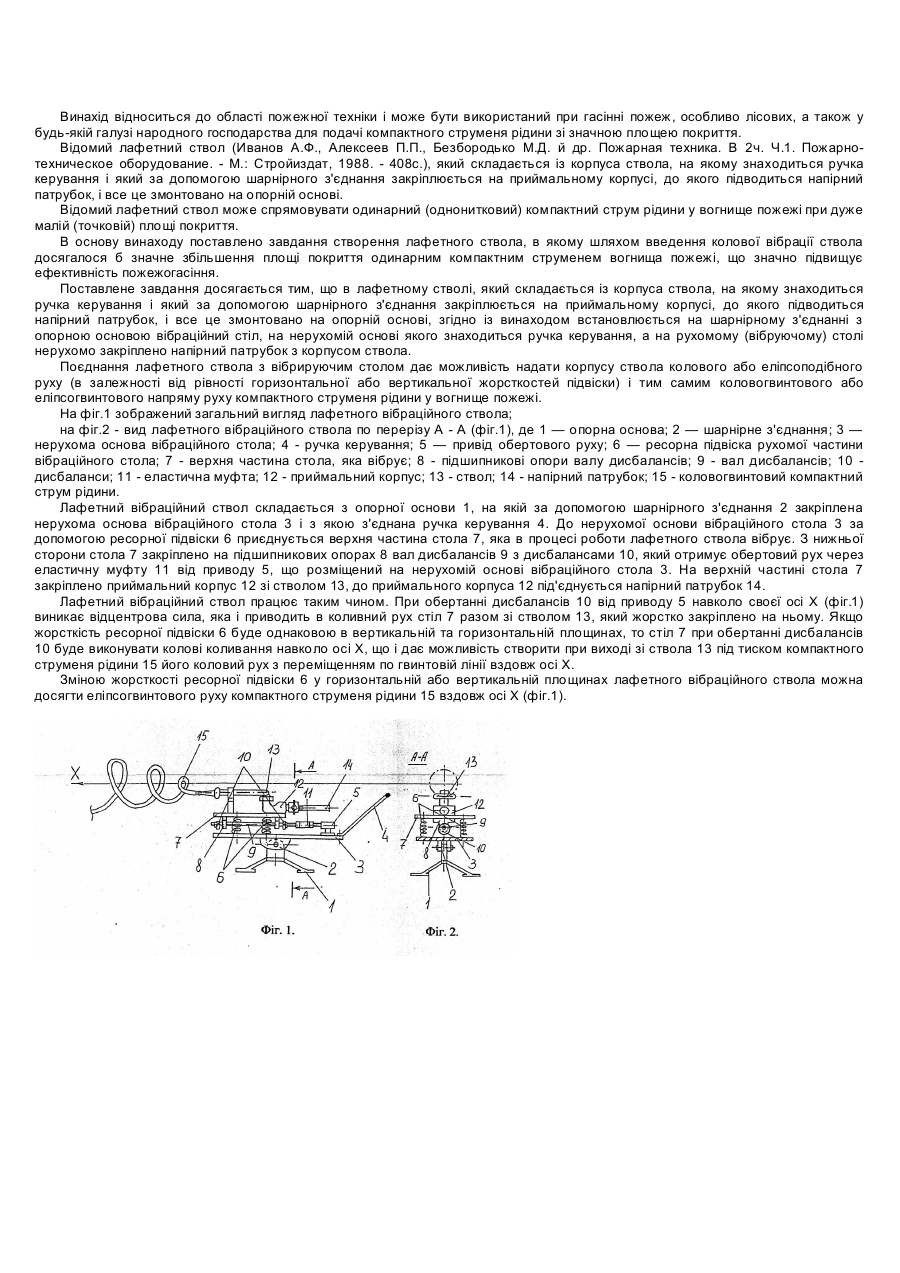
Лафетний ствол для гасіння пожежі, що містить корпус ствола, на якому знаходиться ручка керування, закріплений за допомогою шарнірного з'єднання на приймальному корпусі, до якого підведений напірний патрубок, і все це змонтовано на опорній основі, який відрізняється тим, що на опорній основі встановлений на шарнірному з'єднанні з опорною основою вібраційний стіл, на нерухомій основі якого знаходиться ручка керування, а на рухомому...
Пристрій для подачі суцільного струменя води на гасіння пожежі з одночасним утворенням захисного водяного екрана
Номер патенту: 54333
Опубліковано: 10.11.2010
Автори: Лазаренко Олександр Вікторович, Желяк Володимир Іванович
МПК: A62C 31/00
Мітки: подачі, одночасним, захисного, води, утворенням, гасіння, пожежі, водяного, пристрій, суцільного, екрана, струменя
Формула / Реферат:
Пристрій (пожежний ствол) для подачі суцільного струменя води на гасіння пожежі з одночасним утворенням захисного водяного екрана, який відрізняється тим, що подача води на гасіння і зниження густини теплового потоку здійснюється одночасно з одного пристрою (пожежного ствола), з підключенням до однієї рукавної лінії.
Попередній патент: Трибометр для випробувань матеріалів на зношування
Наступний патент: Самоцентруючий трикулачковий патрон
Випадковий патент: Система розділення рідких сумішей методом випаровування через мембрани