Пристрій для магнітотерапії

Формула / Реферат
1. Устройство для магнитотерапии, содержащее источник переменного электрического тока, с которым соединены n индукторов магнитного поля, при этом n³2, и гибкое основание, на котором индукторы магнитного поля размещены, при этом каждый индуктор магнитного поля включает катушку индуктивности на магнитопроводе и корпус с пазами с двух сторон и рабочей поверхностью, отличающееся тем, что гибкое основание выполнено в виде m эластичных стержней, каждый из которых снабжен осевым каналом и сопряженными между собой пазом и двумя упорными фланцами на концах, при этом m=n-1, в осевых каналах эластичных стержней размещены электрические проводники, последовательно соединяющие индукторы магнитного поля, каждый эластичный стержень зафиксирован своими пазами в пазах соседних корпусов индукторов, выполненных в их нерабочих поверхностях соосно продольной оси.
2. Устройство по п.1, оτличающееся тем, что каждый эластичный стержень выполнен из эластомера или пластиката.
3. Устройство по.1 отличающееся тем, что каждый индуктор магнитного поля снабжен дополнительной рабочей поверхностью на противоположном торце корпуса.
4. Устройство по 1, отличающееся тем, что корпус индуктора магнитного поля выполнен в форме уплощенного бочонка, торцы которого служат рабочими поверхностями.
5. Устройство по п.1, отличающееся тем, что магнитопровод выполнен в виде металлического стержня с фланцами на торцах.
Текст
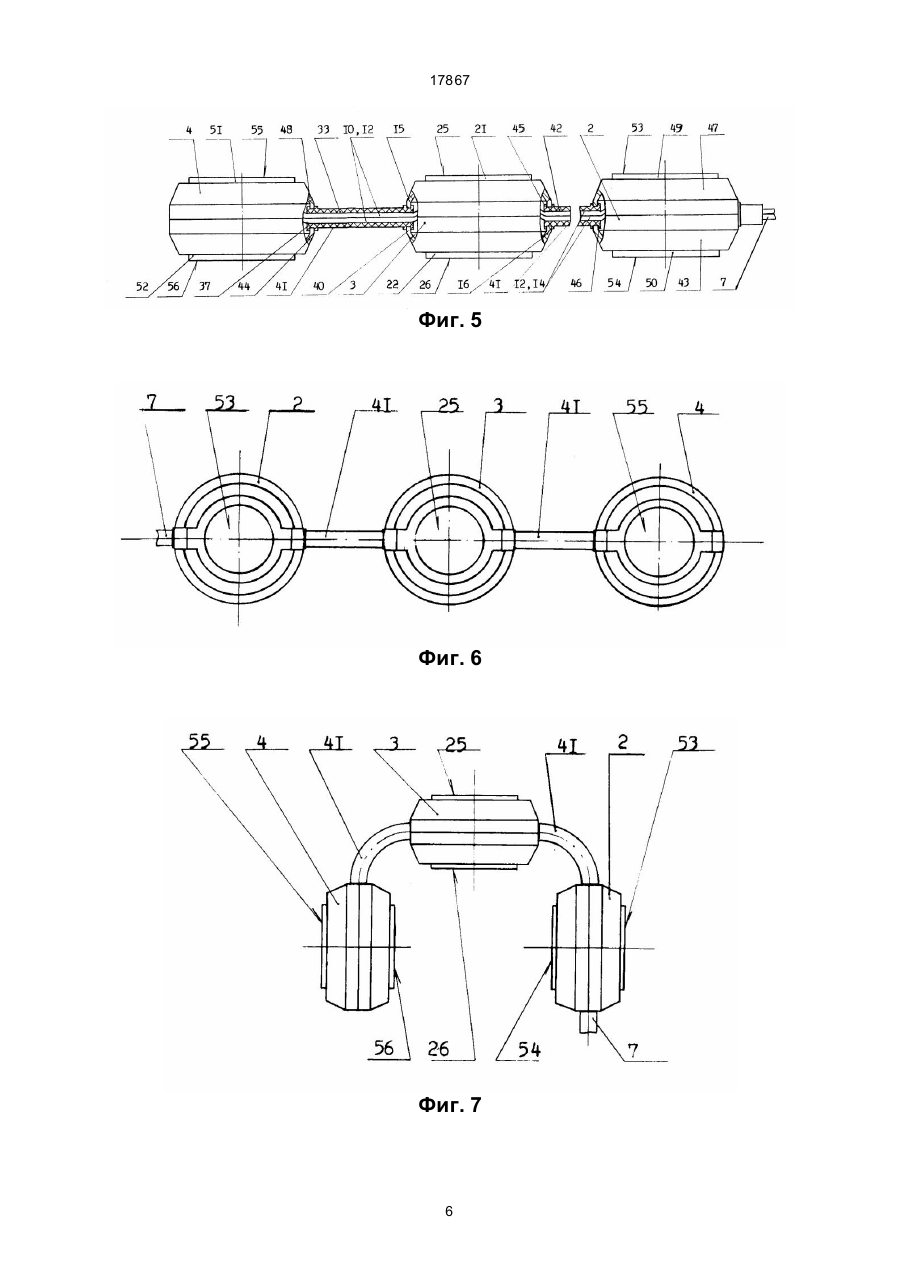
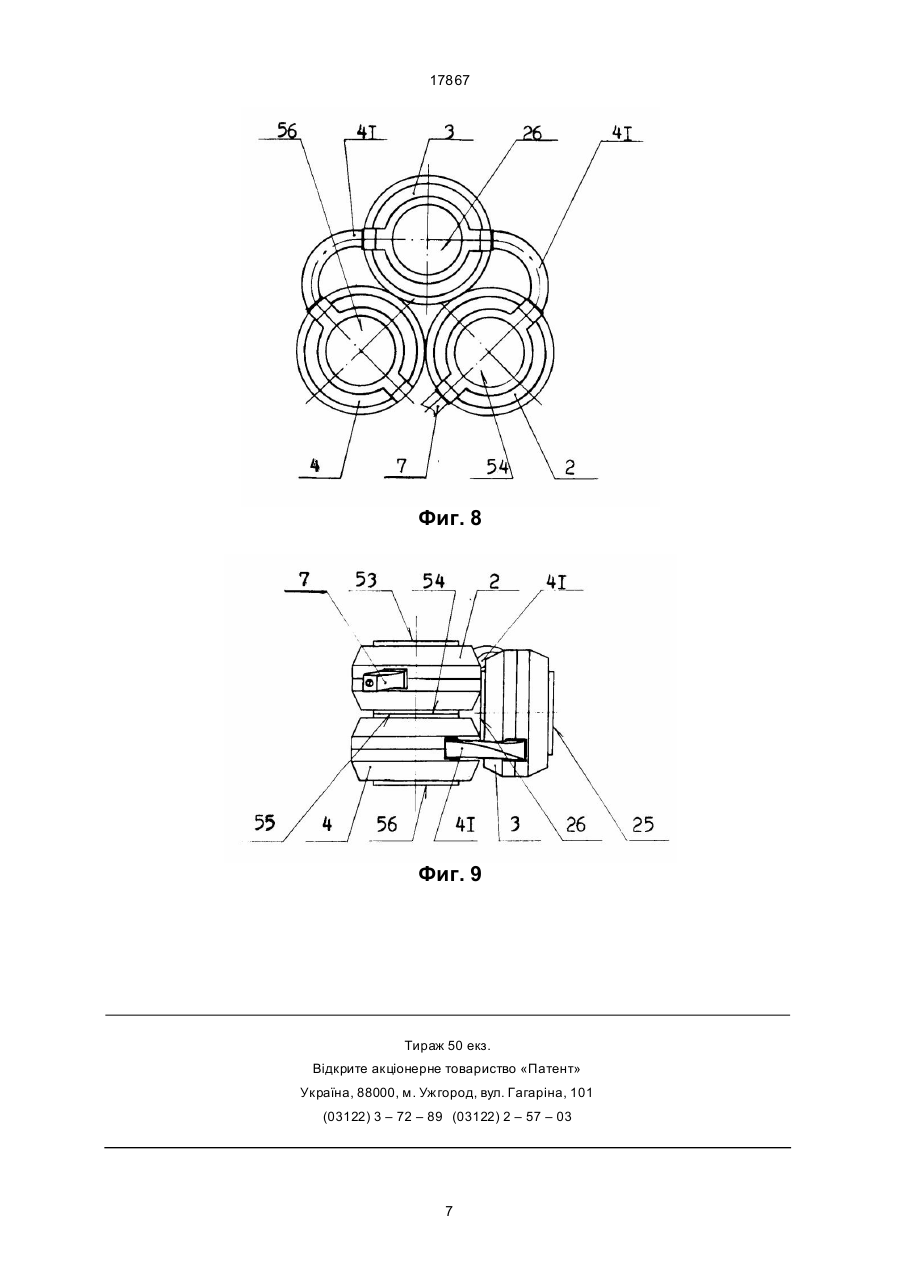
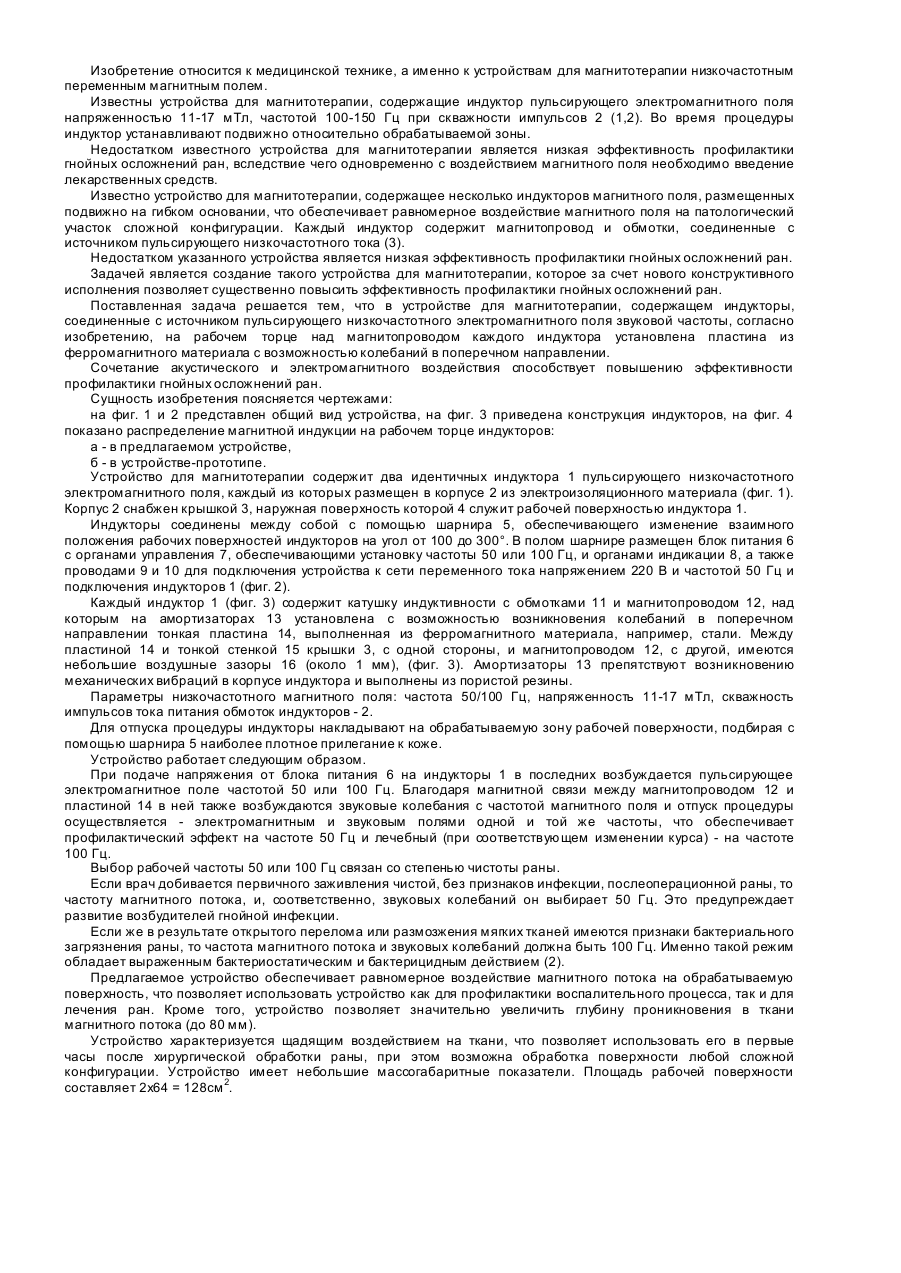
1. Устройство для магнитоте рапии, содержащее источник переменного электрического то ка, с кото рым соединены n индукто ров магнитного поля, при этом n ³ 2, и гибкое основание, на котором индукторы магнитного поля размещены, при этом каждый индук тор магнитного поля включает катушку индуктивности на магнитопрово де и корпус с пазами с двух сторон и рабочей поверхностью, отличающее ся тем, что гибкое основание выполнено в виде m эластичных стержней, каждый из которых снабжен осевым каналом и сопряженными между со бой пазом и двумя упорными фланцами на концах, при этом m = n – 1, в 17867 индук тивности на магнитопроводе и корпус с рабочей поверхностью и пазами с двух сто рон; источник переменного электрического тока, с которым соединены индукто ры магнитного поля; гибкое основание, на котором индук торы магнитного поля размещены. Устройство сложно в конструкции и эксплуатации и не может изменить своей линейной конфи гурации. Действи тельно, для омагничи ва ния участка сложной фор мы необхо димо опти мально наложить гибкое основа ние, разместить индукторы, кото рые имеют воз можность лишь осе во го перемеще ния по направляющим основания, и закрепить гибкое основа ние на те ле. Для те рапии обшир ных участков устройство повтор но накла дывают на па толо гический очаг, что увеличи вает ко личество процедур. Сложность конструк ции обусловлена нали чием нескольких длинномерных эле менто в: сло женного вдвое упруго го шн ура; нескольких шн уров пи тания индукто ров, сое диненных па раллельно; размножите ля электрических си гналов, также присоединенного шн уром к блоку пи тания. Все это перед отпуском процедуры необхо димо расположить так, что бы были обеспечены надежные контакты, а шн уры не беспокоили пациента. Кро ме того, для на дежного отпуска процедуры рабочие повер хности индукто ров должны прилегать к обрабаты ваемому уча стку, что обеспечивается фик сацией гибкого основа ния на те ле пациента . В основу изобретения поставлена задача в устройстве для магнитотерапии путем изменения формы выполнения элементов (индук торов и гибкого основания), их взаимного расположения, формы выполнения связей и введения дополнительного элемента обеспечить возможность пространственного изменения конфигурации устройства при одновременном упроще нии конструкции и эксплуатации. Поставленная задача решена следующим образом. В устройстве для магнито терапии, содержащем источник переменного электрического то ка, с которым соединены n индук торов магнитного поля, при этом n ³ 2, и гибкое основание, на котором индук торы магнитного поля размеще ны, при этом каждый индуктор магнитного поля включает катушку индуктивности на магнитопроводе и корпус с пазами с двух сторон и рабочей поверхностью, выполнено гибкое основа ние в виде m эластичных стержней, каждый из которых снабжен осевым каналом и сопряженными между со бой пазом и двумя упорными фланцами на концах, причем m = = n – 1, в осевых каналах эластичных стержней размещены электрические проводники, последовательно соединяющие индукторы магнитного поля, каждый эластичный стержень зафиксирован своими пазами в пазах соседних корпусов индуктора, выполненных в их нерабочих поверхностях соосно продольной оси. При этом каждый эластичный стержень выполнен из эластомера или пластиката. При этом каждый индуктор магнитного поля снабжен дополнительной рабочей поверхностью, расположенной на проти воположном торце корпуса. При этом каждый индуктор выполнен в форме уплощенного бочонка, торцы которого служат рабочими поверхностями. При этом магнитопровод выполнен в виде металлического стержня с фланцами на торцах. Выполнение гибкого основания в виде m эластичных стержней, где m = n – 1, каждый из которых зафиксирован своими концами в корпусах двух со седних индукторов, меха нически соединенных между со бой соосно продольной оси устройства, обеспечивает возможность осевой и эластичной связи индукторов друг с другом, что, в свою очередь, обеспечивает возможность пространственного изменения конфи гурации устройства для омагничива ния патологического очага любой формы. В отличие от известного устройства, в котором гибкое основание лишь прижимает рабочие поверхности индукто ров к обрабатываемому участку тела без изменения своей линейной конфи гурации, в заявляемом изобретении благодаря гибкости эластичных стержней, их незначительному поперечному сечению и точечному скреплению их с боковыми поверхностями корпусов индук торов и соосно их продольной оси, гибкое основание может искривляться и/или отклоняться от продольной оси устройства по трем осям координат. Такие свойства гибкого основания обеспечивают сле дующие возможности: 1) расположить индукторы магнитного поля в ви де цепочки с размещенными на некотором расстоянии индукторами, при этом дистанцию между ними можно уменьшать вплоть до соприкосновения корпусов; 2) сгруппировать несколько индукторов на площа ди омагничиваемого участка (с промежутками между индукторами или без них); 3) наложить два индуктора рабочими поверхностями один на другой и получить усиленное поле с небольшой вибрацией; 4) расположить один или несколько индукторов на боковые поверхности корпусов так, что их рабочие поверхности будут перпендикулярны остальным; 5) комбинировать вышеназванные варианты использования. Выполнение в каждом эластичном стержне осевого канала обеспечивает гибкость и упругость устройства в целом, а также дает возможность размещения в осевом канале электрических проводников, соединяющих индукторы, при этом проводники получают дополнительную защи ту от повреждения изоляции, перегибов и изломов, а внешнее "отсутствие" проводников упрощает конструкцию и эксплуа тацию. Выполнение на каждом из концов эластичного стержня пазов, сопряженных с упорными фланцами, обеспечивает "то чечность" и эластичность связи стержень-индуктор, возможность фиксации концов стержня в пазах индукто ров и ее надежность. Выполнение эластичного стержня из эластомера (натурального или синтети ческого каучука) или пластиката (пластифи цированного каучука) обеспечивает наилучшие показате ли эластичности и продолжительности работы, а также отличные изоляционные свойства. 2 17867 Выполнение в каждом индукторе дополнительной рабочей поверхности на противо положном торце корпуса увеличивает совокупную рабочую поверхность, упрощает эксплуата цию (все рабочие плоскости идентичны) и расши ряет функциональные возможности устройства. Выполнение корпуса индуктора в фор ме уплощенного бочонка, торцы которого служат рабочими поверхностями, обеспечивает возможность выполнения пазов на нерабочих боковых по верхностях корпуса соосно продольной оси, а также обеспечивает достаточное давление на обрабатываемый участок тела, противодействующее уп ругим силам гибкого основания и удерживающее индукторы в месте их установки. Выполнение магнитопровода в виде металлического стержня с фланцами на торцах обеспечивает возможность создания второй рабочей поверхности, идентичной первой, а также обеспечения отпуска равномерного по напряженности магнитного поля, отсутствие дребезжания и вибрации, простоту конструкции. Сущность заявляемого те хнического решения поясняется прилагаемыми чертежами, где изображены: на фиг. 1 – схема принципиальная электрическая заявляемого устройства для магнитотерапии (вариант реализации с тремя индукторами); на фиг. 2 – ин дуктор магнитного поля; на фиг. 3 – эластичный стержень, общий вид; на фиг. 4 – то же, сечение по А–А; на фиг. 5 – индукторы магнитного поля на гибком основа нии; на фиг. 6–9 – варианты пространственной конфигурации заявляемого устройства (линейно плоскостная, линейно изогнутая в пространстве, груп пировка на площа ди, взаимно перпендикулярные и взаимно параллельные рабочие поверхности индукторов), при этом источник переменного электрического тока и шнур электропитания не изображены. Заявляемое устройство для магнитотерапии содержит источник переменного электрического тока 1 и n индукторов магнитного поля, соединенных между со бой последовательно и присоединенных к источнику переменного электрического тока 1, при этом в общем случае число индукто ров магнитного поля n ³ 2, а в описываемом варианте реализации n = 3 (фиг. 1). Каждый из индукторов магнитного поля 2, 3, 4 содержит катушку индуктивности, магнитопровод и корпус и предназначен для отпуска магнитной процедуры. Источник переменного электрического тока 1 предназначен для обеспечения заявляемого устройства эксплуа тационным напряжением с частотой 100 Гц и пульсирующей фор мой тока и содержит контактные гнезда 5 для присоединения к ним сетевой вилки 6 шнура электропитания 7. Шнур электропитания 7 предназначен также и для непосредственного присоединения индук торов магнитного поля к сети переменного то ка 220 В частотой 50 Гц и соединен с диодом 8 и с одним из выводов катушки индуктивности 9 индуктора 2. Диод 8 обеспечивает питание катушек индуктивности током импульсной формы и размещен в одном из корпусов индукторов (не показано на чертежах). Второй вывод катушки индук тивности 9 соединен с помощью электрического проводника 10 с первым выводом катушки индуктивности 11 индуктора магнитного поля 3, второй вывод которой с помощью электрического проводника 12 соединен с первым выводом катушки индуктивности 13 индуктора магнитного поля 4. Второй вывод катушки индук тивности 13 соединен с помощью электрического проводника 14 с диодом 8 (фиг. 1). Корпус каждого из малогабаритных индукторов выполнен из двух полукорпусов 15, 16 из электроизоляционного материала и имеет форму уп лощенного бочонка, а именно тела враще ния с цилиндрической средней частью 17, 18, сопряженной с двумя конусными поверхностями 19, 20 (фиг. 2). С торцев корпус ограничен двумя круглыми параллельными пластинами 21, 22, установленными в углублениях 23, 24, выполненных в торцевых частях корпуса. Наружные поверхности пластин 21, 22 предназначены для контакта с телом пациента при отпуске магнитопроцедуры и являются рабочими поверхностями 25, 26 индуктора магнитного поля. Цилиндрическая часть корпуса, образованная соответствующими поверхностями 17, 18 полукорпусов 15, 16, предназначена для выполнения в ней пазов 27, 28 с двух противо положных сторон и соосно продольной оси корпуса. Пазы предназначены для соединения с гибким основанием и прохождения электрических проводников, соединяющи х индук торы. В корпусе индуктора 3 размещена катушка индук тивности 11 на своем каркасе 29, в осевом отверстии которого установлен магнитопровод 30. Магнитопровод предназначен для концентрации электромагнитной энергии на рабочих поверхностях ин дуктора 25, 26 и выполнен в виде металлического стержня с фланцами 31, 32 на торцах, один из которых развальцован, а вто рой присоединен с помощью винта (не показан на чертежах). Гибкое основание, соединяющее корпуса индук торов, в общем случае выполнено в виде m эластичных стержней, концы каждого из которых зафиксированы в пазах соседних корпусов индукторов, а в их осевых каналах размещены электрические проводники, соединяющие индук торы, при этом m = n – 1, где n – число индукто ров. В описываемом примере реализации три индукто ра соединены гибким основанием, выполненном из двух эластичных стержней. Эластичный стержень 33 (фиг. 3) снабжен осевым каналом 34, предназначенным для размеще ния в нем электрических проводников, соединяющи х катушки индукторов между собой. На каждом из концов эластичного стержня 33 выполнены пазы 35, 36, опоясывающие стержень по периметру и предназначенные для фиксации в них сте нок корпусов индукторов. Вертикальные стенки пазов 35, 36 сопряжены с двумя упорными фланцами 37, 38 и 39, 40, соответственно, предназначенными для упора в них стенок корпусов. Упорные фланцы 37 и 40 расположены на концах эластичного стержня 33, имеют квадратное сечение и большую, чем у фланцев 38, 39, площадь и предназначены для размеще ния внутри корпусов индукто ров (фиг. 4). 3 17867 Соединение индукторов магнитного поля 2, 3, 4 гибким основанием 41 произведено следующим образом (фиг. 5). В эластичные стержни 33 и 42 закладывают проводники. Катушки, каждую на своем каркасе, размещают в полукорпусах 43, 44 индукторов 2, 3, 4, соответственно. Стержни магнитопроводов заводят в осевые отверстия каркасов катушек. Концы каждого из эластичных стержней 33 и 42 с размещенными в них электрическими проводниками 10, 12 и 14 устанавливают в пазы корпусов индукторов и фиксируют стенки полукорпусов 16, 43 и 44 в пазах эластичных стержней 33 и 42, соответственно, при этом концевые упорные фланцы стержней размещают за стенками полукорпусов. Площадь каждого из концевых фланцев 37, 40 и 45, 46 эластичных стержней 33 и 42, соответственно, превышает площадь каждого из пазов в корпусах индукторов, что обеспечивает прочную фиксацию концов стержней в пазах корпусов. После этого соединяют выводы катушек индуктивности с электрическими проводниками и закрывают вторые полукорпуса 15, 47 и 48. В углублениях торцевых частей полукорпусов устанавливают вторые фланцы магнитопроводов и скрепляют каждую сборку (магнитопровод с фланцем, катушку индуктивности на своем каркасе и оба полукорпуса) одним винтом. В углубления в торцевых частях корпусов закладывают пластины 21 и 22, 49 и 50, 51 и 52 и скрепляют их с полукорпусами (клей, термосварка и аналогичное). После это го рабочие плоскости 25, 26 индуктора 3, 53 и 54 индуктора 2 и 55, 56 индуктора 4 готовы к отпуску магнитопроцедуры. Корпуса индукторов выполнены из пластмассы. Эластичные стержни выполнены из эластомера (натурального или синтети ческого каучука) или пластиката (пластифи цированного каучука) и отвечают требованиям санитарной обработки и электробезопасности. Магнитопровод выполнен из магнитного металла. Заявляемое устройство для магнитотерапии работает следующим образом. Индукторы магнитного поля 2, 3, 4, соединенные гибким основанием 41, накладывают на обрабатываемый участок тела пациента так, чтобы рабочие поверхности индукторов находились над патологическими очагами (рефлекторными зонами). Все последовательно соединенные индукторы являются идентичными источниками магнитного поля, при этом магнитное поле имеет равномерную напряженность на всех рабочих поверхностях. Заявляемое устройство для магнитотерапии обеспечивает два режима отпуска низкочастотного магнитного поля: а) с частотой 50 Гц и синусоидально-усеченной формой тока; б) с частотой 100 Гц и пульсирующей формой тока. В первом режиме работы вилку 6 шнура электропитания 7 подключают непосредственно к сети переменного тока напряжением 220 В частотой 50 Гц, во втором – к гнездам 5 источника переменного электрического тока 1 с часто той 100 Гц, в свою очередь соединенного с сетью переменного тока. Выбор режима работы и продолжительность процедуры определяются медицинскими показаниями по известным мето дикам и способам лечения, в том числе по способу профилактики гнойных осложнений ран (Патент Украины № 6166, "Спосiб профiлактики гнiйних уск ладнень ураз" оп. 29.12.94 в бюл. № 8–1–94 A 61 N 2/00). Прилегание рабочих поверхностей индукторов к обрабатываемому участку те ла обеспечено взаимодействием сил тяжести индукторов и упругих сил гибкого основания. Благодаря небольшой площа ди рабочей поверхности индуктор даже при небольшой массе (до 200 г) обеспечивает достаточное давление на обрабатываемый участок, чтобы противодействовать силам упругости, стремящимся выпрямить гибкое основание. Малая площадь поперечного сечения гибкого основания и свойства материала обеспечивают доста точно интенсивные упругие силы, возвращающие гибкое основание в исходное состояние без остаточной деформации после снятия индукто ров. Небольшая площадь рабочей поверхности индук тора дает возможность обработки отдельного небольшо го очага (ухо, местное воспаление), а небольшая масса индукто ра позволяет накладывать его даже на послеоперационную ра ну. Совокупность нескольких идентичных индукторов на гибком основании и равномерное по напряженности магнитное поле дают воз можность одновременного омагничивания нескольких очагов или рефлекторных зон (миндалины, зубы, позвоночник, гайморовы пазухи, суставы и т.п.), при этом гибкое основание может быть расположено как линейно на плоскости, так и иметь более сложную пространственную конфигурацию (фиг. 6–7). При необходимости обработки обширных участков индукторы магнитного поля группируют на пато логическом очаге, при этом в соответствии с фор мой очага дистанция между индук торами может быть изменена за счет искривления гибкого основания 41 (вплоть до соприкосновения корпусов индукторов). Это обеспечивает возможность омагничивания равномерным по напряженности магнитным полем всего патологического очага и предотвращения развития патологического процесса в необработанных участках (фиг. 8). Один или несколько индукторов могут быть повернуты на 90о, при этом его (их) рабочие поверхности будут перпендикулярны рабочим поверхностям остальных индукторов. Это дает возможность либо исключить этот (эти) индукто ры из совокупной рабочей поверхности заявляемого устройства для предотвращения ненужного омагничивания, либо удлинить дистанцию между индукторами, либо омагнитить участок, расположенный перпендикулярно другим (фиг. 9). Выполнение каждого из индукторов с двумя рабочими поверхностями расши ряет функциональные возможности устройства и уп рощает его эксплуа тацию. Заявляемое устройство позволяет омагничивать одним или несколькими индукторами не только выпуклые, но и вогнутые поверхности (подмышки, подколенные впадины, промежность, кисти обеих рук одновременно и т.п.). Два индуктора могут быть уста новлены друг на друга так, что две их рабочие поверхности совмещаются, а на наружных рабочих поверхностях индук торов индуцируется усиленное магнитное поле с небольшой вибрацией, что повышает эффективность магнитопроцедуры и расширяет область применения устройства (фиг. 9). 4 17867 Вариант реализации заявляемого устройства при числе индукторов более трех эффективен при те рапии удлиненных органов и участков тела (позвоночник, сосуды, нервы и т.п.) и весьма обширных очагов. Фиг. 1 Фиг. 2 Фиг. 3 Фиг. 4 5 17867 Фиг. 5 Фиг. 6 Фиг. 7 6 17867 Фиг. 8 Фиг. 9 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 – 72 – 89 (03122) 2 – 57 – 03 7
ДивитисяДодаткова інформація
Назва патенту англійськоюA mechanism for magnetic therapy
Автори англійськоюApotovskyi Yukhym Leonidovych
Назва патенту російськоюУстройство для магнитотерапии
Автори російськоюАпотовский Ефим Леонидович
МПК / Мітки
МПК: A61N 2/12
Мітки: магнітотерапії, пристрій
Код посилання
<a href="https://ua.patents.su/7-17867-pristrijj-dlya-magnitoterapi.html" target="_blank" rel="follow" title="База патентів України">Пристрій для магнітотерапії</a>
Пристрій для магнітотерапії
Номер патенту: 4119
Опубліковано: 27.12.1994
Автори: Сердюк Валентин Вікторович, Ройзин Володимир Львович, Апотовський Юхим Леонідович, Гальперин Ернст Абрамович, Сайєд Ахмед Мухсен
МПК: A61N 2/00
Мітки: пристрій, магнітотерапії
Формула / Реферат:
Устройство для магнитотерапии, содержащее индукторы, соединенные с источником пульсирующего низкочастотного электромагнитного поля звуковой частоты, отличающееся тем, что на рабочем торце над магнитопроводом каждого индуктора установлена пластина из ферромагнитного материала с возможностью колебаний в поперечном направлении.
Електронний пристрій для магнітотерапії
Номер патенту: 15235
Опубліковано: 30.06.1997
Автори: Синєкоп Юрій Степанович, Бугайов Володимир Степанович, Дербеденев Андрій Ігоревич, Зубчук Віктор Іванович, Варченко Віталій Григорович
МПК: A61N 2/00
Мітки: пристрій, електронний, магнітотерапії
Формула / Реферат:
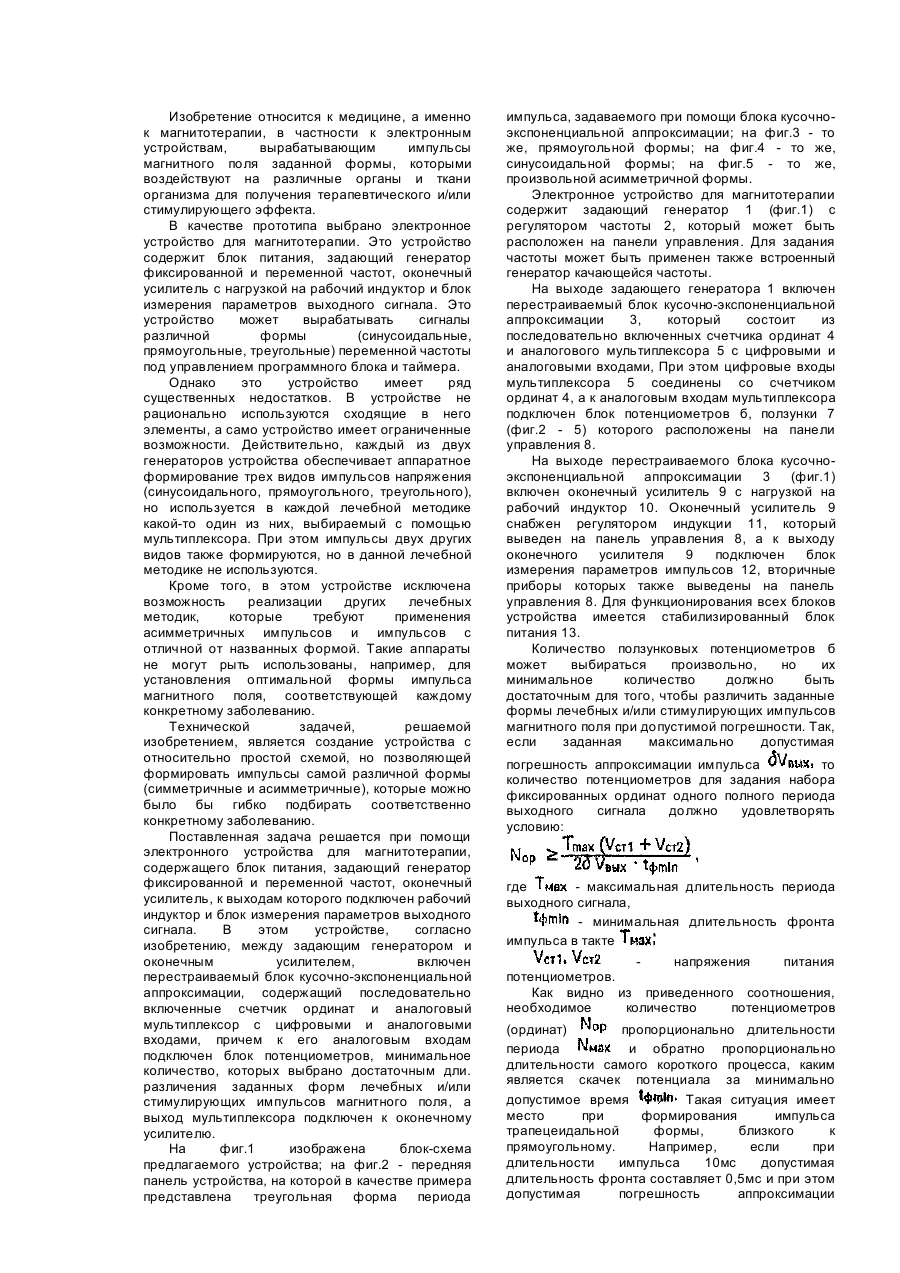
Электронное устройство для магнитотерапии, содержащее блок питания, задающий генератор фиксированной и переменной частот, оконечный усилитель, к выходам которого подключен рабочий индуктор и блок измерения параметров выходного сигнала, отличающееся тем, что между задающим генератором и оконечным усилителем включен перестраиваемый блок кусочно-экспоненциальной аппроксимации, содержащий последовательно включенные счетчик ординат и...
Пристрій для магнітотерапії
Номер патенту: 22659
Опубліковано: 07.04.1998
Автор: Гармаш Іван Васильович
МПК: A61N 2/02
Мітки: магнітотерапії, пристрій
Формула / Реферат:
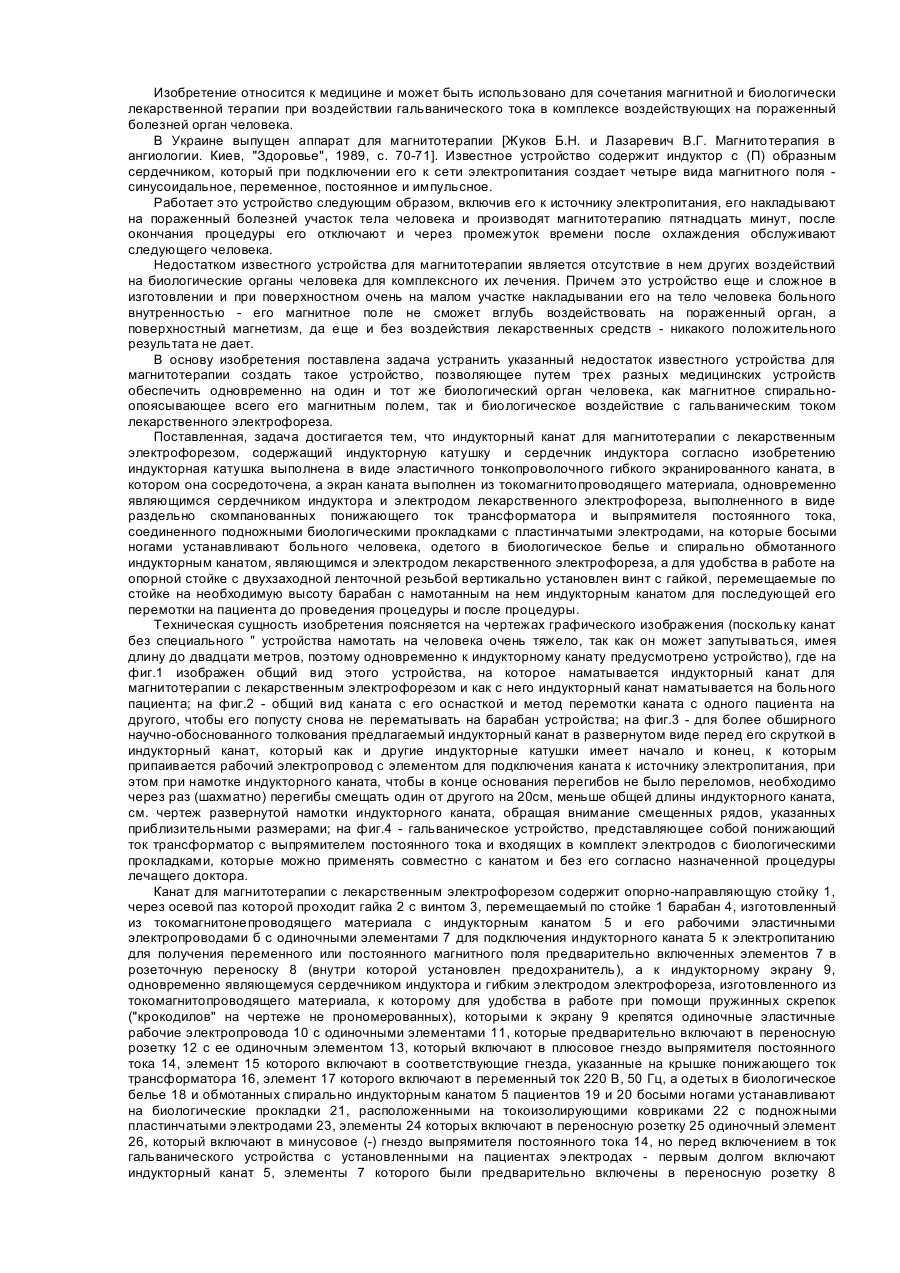
Устройство для магнитотерапии, содержащее индукторную катушку и сердечник индуктора, отличающееся тем, что индукторная катушка выполнена в виде эластичного тонкопроволочного гибкого экранированного каната, в котором она сосредоточена, а экран каната выполнен из токомагнитопроводящего материала одновременно являющимся сердечником индуктора и электродом лекарственного электрофореза, подключаемого к гальваническому устройству, представляющему...
Пристрій для магнітотерапіі з лікарським електрофорезом
Номер патенту: 23783
Опубліковано: 16.06.1998
Автор: Гармаш Іван Васильович
МПК: A61N 2/00
Мітки: електрофорезом, пристрій, лікарським, магнітотерапіі
Формула / Реферат:
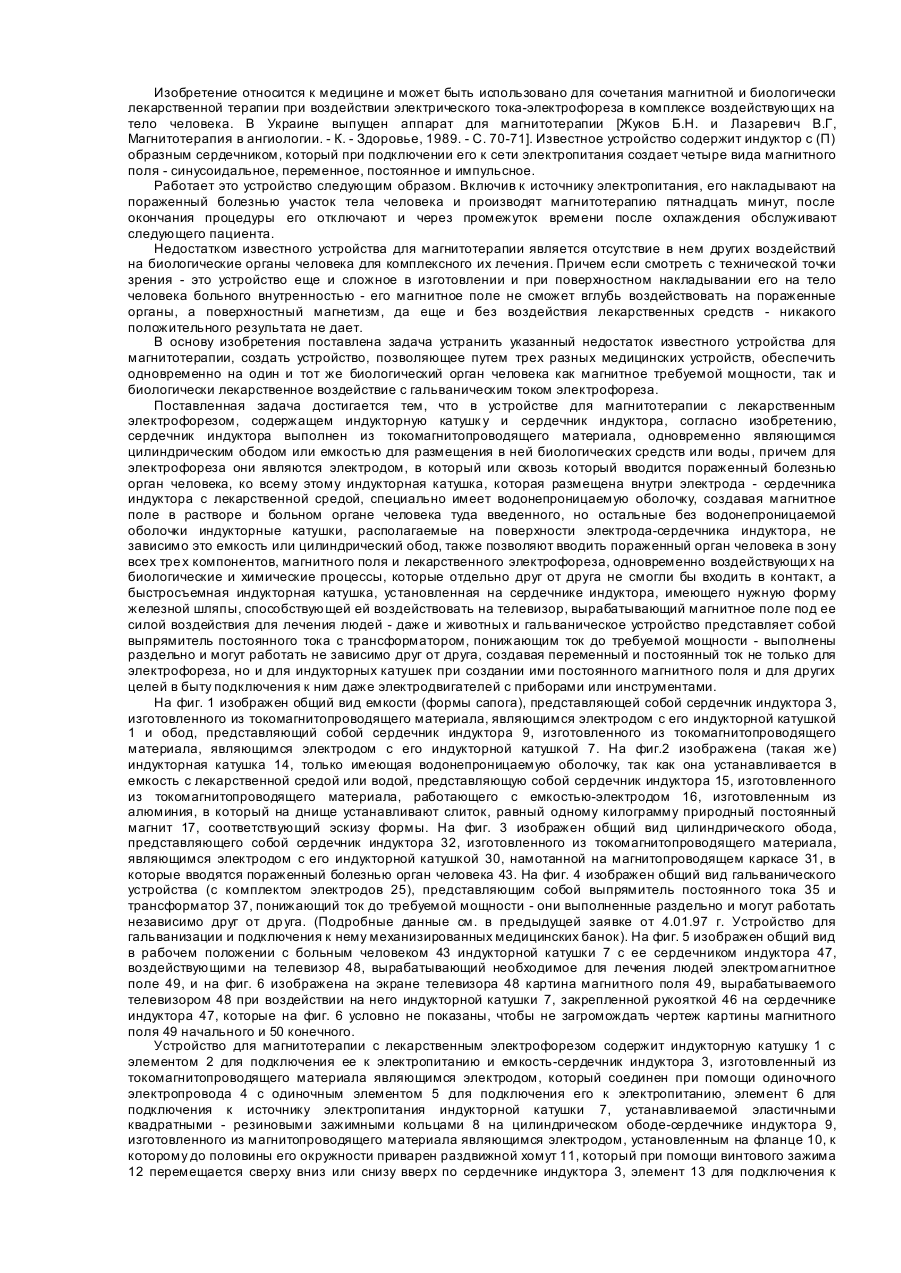
Устройство для магнитотерапии с лекарственным электрофорезом, содержащее индукторную катушку и сердечник индуктора, отличающееся тем, что сердечник индуктора выполнен из токомагнитопроводящего материала, одновременно являющимся цилиндрическим ободом или емкостью для размещения в ней биологически лекарственных средств или воды, причем для электрофореза они являются электродом, в который или сквозь который вводится пораженный болезнью орган...
Пристрій для магнітотерапії удм-1
Номер патенту: 512
Опубліковано: 15.09.2000
Автори: Кіхтенко Ігор Миколайович, Хворостенко Михайло Іванович, Кульчицький Анатолій Володимирович
МПК: A61N 2/00
Мітки: пристрій, магнітотерапії, удм-1
Формула / Реферат:
Пристрій для магнітотерапії, що містить випромінювач магнітного поля з U-подібним феромагнітним стрижнем ι обмотку збудження, який відрізняється тим, що додатково введені конденсатор та узгоджуючий трансформатор, причому конденсатор та вторинна обмотка узгоджуючого трансформатора своїми виводами з'єднані з відповідними виводами обмотки збудження
Попередній патент: Транзисторний інвертор з широтно-імпульсною модуляцією
Наступний патент: Спосіб підготування крохмалевмісної сировини для спиртового бродіння
Випадковий патент: Сошниковий вузол для селекційних сівалок