Трикомпонентний п’єзоелектричний акселерометр
Номер патенту: 31327
Опубліковано: 15.12.2000
Автори: Шеховцов Борис Анатолійович, Лукашенко Валентина Максимівна, Баранов Олексій Генадійович, Бикова Олена Валентинівна
Формула / Реферат
Трикомпонентний п'єзоелектричний акселерометр, що містить корпус, кубічну інерційну масу, з розташованими на її гранях п'єзоелементами, осі чутливості яких містяться на трьох взаємоперпендикулярних напрямках, перетинаючи центр кубічної інерційної маси, і систему кріплення інерційної маси до корпусу, виконану із п'яти клиноподібних затискувачів, закріплених кожний одними кінцями до корпусу з можливістю їх регулювання в напрямку, поперечному відносно осі чутливості, та вільних кульок, вбудованих між клиноподібними затискувачами і накладками п'єзоелементів, який відрізняється тим, що система кріплення інерційної маси прилаштована додатковими опорами, наприклад, стопорними гвинтами, які встановлені у корпусі по осям чутливості акселерометра, з можливістю регулювання в процесі настройки й експлуатації, а клиноподібні затискачі другими о кінцями закріплені у корпусі за допомогою нарізного з'єднання.
Текст
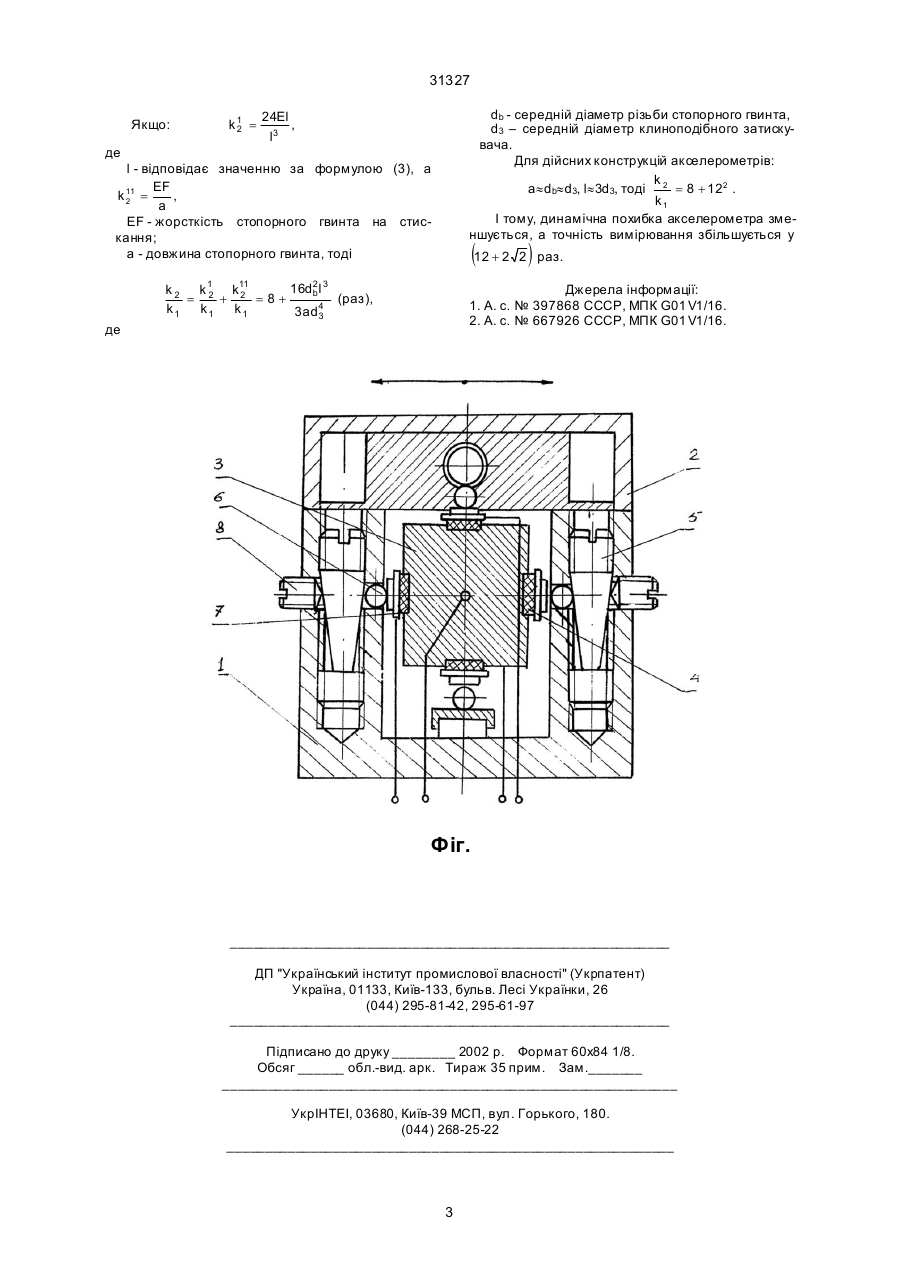
Трикомпонентний п'єзоелектричний акселерометр, що містить корпус, кубічн у інерційну масу, з розташованими на її гранях п'єзоелементами, осі чутливості яких містяться на трьох взаємоперпендикулярних напрямках, перетинаючи центр кубіч (2) 31327 Коефіцієнт пружності клиноподібних затискачів у даному приладі визначається за формулою: k1 = 3El , l3 Трикомпонентний п'єзоелектричний акселерометр, що пропонується, має такий устрій: корпус 1 з кришкою 2, кубічну інерційну масу 3, на гранях якої встановлені п'єзоелементи 4, клиноподібні затискачі 5, виконані з різьбою на обох кінцях і закріплені у корпусі 1 з дво х боків, вони мають можливість регулюватись у напрямку, поперечному відносно осі чутливості; вільні кульки 6, вбудовані безпосередньо між клиноподібними затискувачами і накладками 7, п'єзоелементи 4, стопорні гвинти 8, що розташовані по осях чутливості п'єзоелементів 4 у корпусі 1. Три пари п'єзоелементів, на кожному напрямку, що вимірюється, з'єднані за схемою тандемдатчика і підключені до вбудованого в акселерометр триканального підсилювача, який не приведений на кресленні. Система клиноподібних затискувачів 5, сумісно з стопорними гвинтами 8, забезпечує підвищення значення коефіцієнта пружності датчика та його стабільність протягом довгого часу експлуатації. Акселерометр працює таким чином. При переміщені корпусу 1 акселерометра, наприклад, по горизонтальній осі (напрямок вказано стрілкою на кресленні), під впливом інерційної масі 3 тиск на п'єзоелементи 4 збільшується, а на протилежні п'єзоелементи зменшується. Сигнали, які виникають при цьому на п'єзоелементах, подаються на вхід підсилювача. При цьому рух інерційної маси 3 по вибраній осі, не утворює осьових тисків на інші пари п'єзоелементів 4. Стопорні гвинти 8, за допомогою яких на осях чутливості п'єзоелементів 4 додатково закріплена інерційна маса 3 через клиноподібні затискачі 5 і вільні кульки 6, запобігає розкручуванню клиноподібних затискувачів 5 від вібрації; стопорні гвинти 8 є додатковою регульованою опорою клиноподібних затискувачів 5 в корпусі 1 у напрямку осей чутливості, що сприяє збільшенню жорсткості конструкції, а це, в свою чергу, зменшує динамічну похибку вимірювання. Таким чином, перевагою винаходу, що пропонується, в порівнянні з прототипом, є підвищення точності вимірювання за рахунок збільшення власної частоти коливань, яка зворотно пропорційна динамічній похибці вимірювання. Збільшення жорсткості системи кріплення інерційної маси за рахунок введення других різьбових кінців клиноподібних затискувачів та додаткових опор (стопорних гвинтів), встановлених по осях чутливості акселерометра, можна оцінити відношенням коефіцієнтів пружності системи кріплення інерційної маси приладу, що пропонується К2, і прототипу К1. Як відомо, для здійсненої схеми кріплення інерційної маси акселерометра, що пропонується: (3) де ЕІ - жорсткість клиноподібного затискача на вигин; l - відстань від краю защемлення в різьбі до осі чутливості акселерометра. Велика динамічна похибка даного акселерометра визначається малим коефіцієнтом пружності системи кріплення інерційної маси, що виготовлена з п'яти клиноподібних затискувачів, кожен з яких закріплений в корпусі тільки одним різьбовим кінцем. Крім того, при вібрації, коли клиноподібні затискачі відкручуються, динамічна похибка різко зростає. Метою винаходу, який запропоновано, є підвищення точності вимірювання за рахунок зменшення динамічної похибки. Поставлена мета досягається тим, що у пристрій, який містить корпус, кубічну інерційну масу, з розташованими на її гранях п'єзоелементами, осі чутливості яких містяться на трьох взаємноперпендикулярних напрямках, перетинаючи центр кубічної інерційної маси, і систему кріплення інерційної маси до корпусу, яка виготовлена із п'яти клиноподібних затискачів, закріплених, кожний з них, одними кінцями до корпусу з можливістю їх регулювання в напрямку, поперечному відносно осі чутливості, та вільних кульок, вбудованих між клиноподібними затискачами і накладками п'єзоелементів, система кріплення інерційної маси прилаштована додатковими опорами, наприклад, стопорними гвинтами, які встановлені у корпусі по осях чутливості акселерометра, з можливістю регулювання в процесі налагоджування й експлуатації, а клиноподібні затискачі другими кінцями закріплені у корпусі за допомогою різьбового з'єднання. В основу винаходу пристрою поставлено задачу підвищення точності трикомпонентного п'єзоелектричного акселерометра шляхом пропонування рішення для усіх ознак, що вказані в відмітній частині формули винаходу, виявляють в процесі взаємодії характерні їм відомі властивості, що дають, кожен із них окремо, відомий позитивний ефект. При цьому забезпечується наддодатковий позитивний ефект, зумовлений сукупністю вказаних ознак, які полягають в тому, що введення додаткових опор, наприклад, регулювальних стопорних гвинтів, встановлених по осям чутливості акселерометра, і виконання різьби на других кінцях клиноподібних затискувачів, підвищує коефіцієнт пружності системи кріплення інерційної маси, одночасно можливо уникнути розкручування клиноподібних затискувачів. Це дозволяє зменшити динамічну похибку, що й призводить до підвищення точності виміру. Таким чином, рішення, що пропонується, задовольняє критерію "суттєві відмінності". На кресленні (фіг.) представлений загальний вигляд трикомпонентного п'єзоелектричного акселерометра, що пропонується. Пристрій містить корпус 1, кришку 2, к убічну інерційну масу 3, п'єзоелементи 4, клиноподібні затискачі 5, кульки 6, накладки 7, стопорні гвинти 8. k2=k 1 +k 11 , 2 2 (4) де k 1 - коефіцієнт пружності клиноподібного зати2 скувача, жорстко закріпленого обома кінцями за допомогою різьбових з'єднань; k 11 - коефіцієнт пружності стопорного гвинта, 2 що має навантаження вздовж осі. 2 31327 Якщо: k1 = 2 db - середній діаметр різьби стопорного гвинта, d3 – середній діаметр клиноподібного затискувача. Для дійсних конструкцій акселерометрів: k a»db»d3, l»3d3, тоді 2 = 8 + 12 2 . k1 І тому, динамічна похибка акселерометра зменшується, а точність вимірювання збільшується у 24El , l3 де l - відповідає значенню за формулою (3), а EF k 11 = , 2 a EF - жорсткість стопорного гвинта на стискання; a - довжина стопорного гвинта, тоді (12 + 2 2 ) раз. 16d2 l 3 k 2 k 1 k11 b = 2 + 2 =8+ (раз), k1 k1 k1 3ad4 3 Джерела інформації: 1. А. с. № 397868 СССР, МПК G01 V1/16. 2. А. с. № 667926 СССР, МПК G01 V1/16. де Фіг. __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2002 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 35 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 3
ДивитисяДодаткова інформація
Назва патенту англійськоюThree-component piezoelectric accelerometer
Автори англійськоюLukashenko Valentyna Maksymivna, Bukova Olena Valentynivna, Baranov Oleksiy Henadiyovych, Shekhovtsov Borys Anatoliiovych
Назва патенту російськоюТрехкомпонентный пьезоэлектрический акселерометр
Автори російськоюЛукашенко Валентина Максимовна, Быкова Елена Валентиновна, Баранов Алексей Геннадиевич, Шеховцов Борис Анатолийович
МПК / Мітки
МПК: G01P 15/09, G01H 11/00, G01V 1/16
Мітки: п'єзоелектричний, трикомпонентний, акселерометр
Код посилання
<a href="https://ua.patents.su/3-31327-trikomponentnijj-pehzoelektrichnijj-akselerometr.html" target="_blank" rel="follow" title="База патентів України">Трикомпонентний п’єзоелектричний акселерометр</a>
Трикомпонентний акселерометр
Номер патенту: 15499
Опубліковано: 30.06.1997
Автори: Лопушенко Віктор Констянтинович, Кабаков Дмитро Вікторович, Збруцький Олександр Васильович, Балабанов Ігор Валерійович, Черняк Микола Григорович
МПК: G01P 15/08
Мітки: трикомпонентний, акселерометр
Формула / Реферат:
1. Трехкомпонентный акселерометр, включающий корпус, внутри которого размещена инерционная масса и ножка с закрепленными на ней двумя датчиками деформации в виде пластин с электродами, отличающийся тем, что дополнительно содержит третий датчик деформации, корпус выполнен цилиндрическим, инерционная масса - в виде диска, а ножка выполнена призматической и установлена в центре корпуса, причем на ней дополнительно закреплен третий датчик таким...
Подільский акселерометр лінійного прискорення
Номер патенту: 2641
Опубліковано: 26.12.1994
Автори: Музичук Антон Максимович, Музичук Федір Максимович
МПК: G01P 15/18
Мітки: подільский, акселерометр, прискорення, лінійного
Формула / Реферат:
1. Подольский акселерометр линейного ускорения, содержащий корпус с боковыми полками в виде швеллера в сечении, направляющий стержень, расположенный вдоль оси чувствительности, установленный на направляющий стержень и подпружиненный относительно корпуса инерционный груз, демпфер и регистратор, отличающийся тем, что в него введены кинематически связанные между собой зубчатое колесо, являющееся инерционным грузом и зубчатая рейка, которая...
Двостепеневий акселерометр
Номер патенту: 15024
Опубліковано: 30.06.1997
Автори: Збруцький Олександр Васильович, Балабанов Ігор Валерійович, Литвиненко Павло Леонідович, Безвесільна Олена Миколаївна
МПК: G01P 15/18, G01C 21/10
Мітки: двостепеневий, акселерометр
Формула / Реферат:
1. Двухстепенной акселерометр, содержащий корпус с размещенным в нем двигателем, на валу которого, посредством упругих торсионов с жестко закрепленными концами, установлен ротор, со смещенным относительно продольной оси торсионов центром масс и закрепленное в корпусе измерительное устройство, отличающийся тем, что центр масс ротора смещен по линии, перпендикулярной одновременно продольной оси упругих торсионов и оси вращения ротора, при этом...
Спосіб визначення швидкості сейсмічної хвилі
Номер патенту: 3525
Опубліковано: 27.12.1994
Автори: Головін Сергій Леонідович, Нєстєров Володимир Вікторович
МПК: G01V 1/16, G01V 1/00, G01V 1/28
Мітки: сейсмічної, хвилі, спосіб, визначення, швидкості
Формула / Реферат:
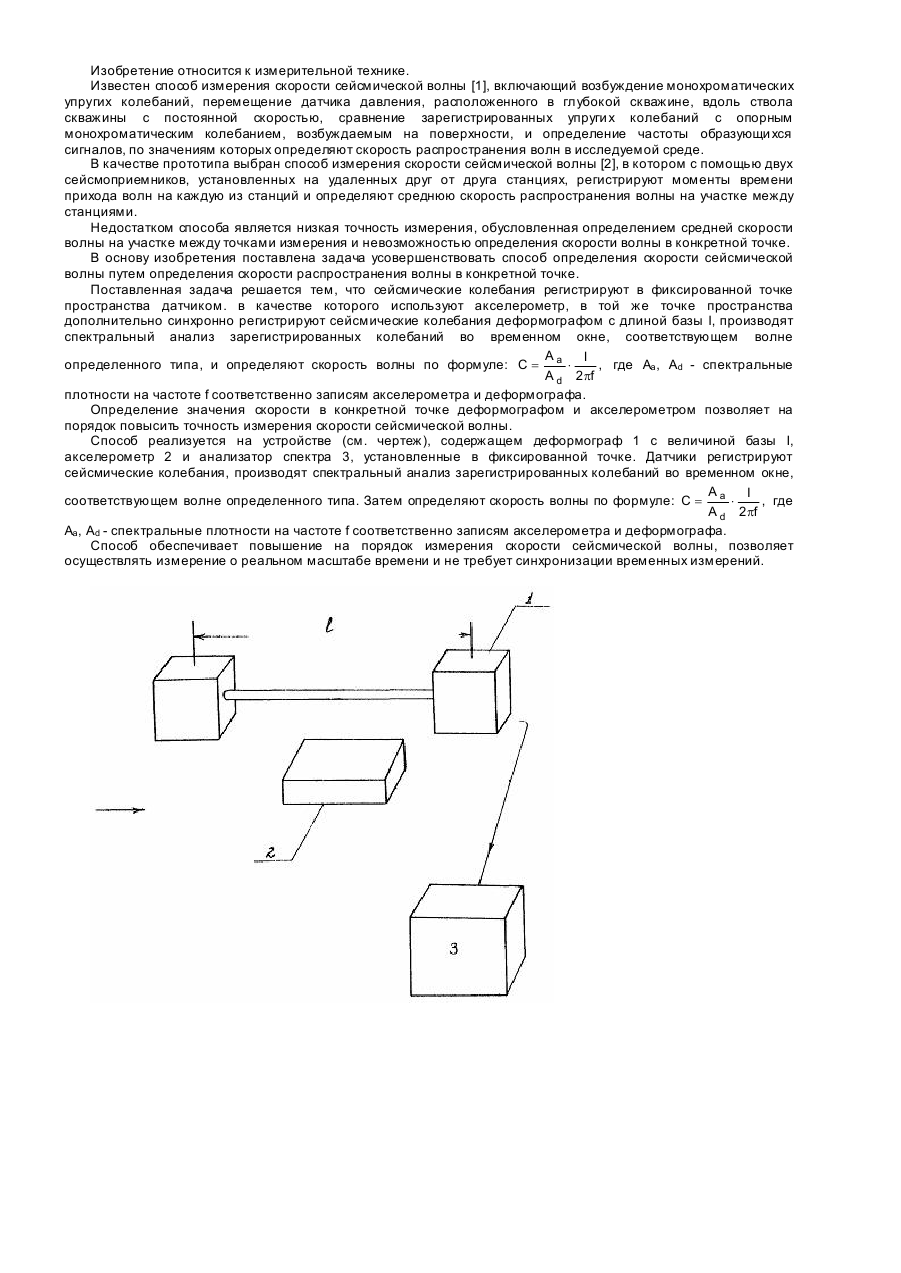
Способ определения скорости сейсмической волны путем регистрации сейсмических колебаний датчиком в фиксированной точке пространства, отличающийся тем, что в качестве датчика используют акселерометр, дополнительно синхронно регистрируют в той же точке сейсмические колебания деформографом с длиной базы I, производят спектральный анализ зарегистрированных колебаний во временном окне, соответствующем волне определенного типа, и определяют...
Пристрій для виявлення сторонніх предметів у матеріалі, що збирається сільськогосподарською збиральною машиною
Номер патенту: 5126
Опубліковано: 28.12.1994
Автори: Еріх Херрманн, Артур Хаушилд, Буркхард Вейсс
МПК: A01D 75/00
Мітки: машиною, збиральною, матеріали, сільськогосподарською, предметів, збирається, пристрій, сторонніх, виявлення
Формула / Реферат:
1. Устройство для обнаружения инородных тел в убираемом сельскохозяйственной уборочной машиной материале, содержащее датчик механической реакции от убираемого материала, установленный на транспортирующем узле с вращающимся уплотняющим элементом, причем, датчик механической реакций от убираемого материала связан со входом блока сбора и обработки данных, выход которого подключен ко входу остановочного блока сельскохозяйственной уборочной...
Попередній патент: Спосіб уретероілеосигмоанастомозу
Наступний патент: Спосіб безперервного вилучення пектину із пектиновмісної сировини
Випадковий патент: Пристрій для вимірювання швидкості звуку