Спосіб визначення місця радіопередавачів
Формула / Реферат
1. Способ определения места радиопередатчиков, заключающийся в определении угла места и азимута радиоволн, принятых радиопеленгатором на одной станции, отличающийся тем, что каждую принятую волну разлагают на первую обыкновенную волну с правой круговой поляризацией и вторую необыкновенную волну с левой круговой поляризацией, затем по двум кривым прогнозирования отношения угол места/расстояние, связанным с распространением обыкновенных и необыкновенных волн, строят две гистограммы зависимости расстояния от угла места каждой из двух воля и по этим двум гистограммам вычисляют общее расстояние до места передатчика.
2. Способ по п.1, отличающийся тем, что земные радиоволны отделяют от ионосферных путем перегруппировки в каждой гистограмме значений угла места в группы, отмечая малые значения угла места, характерные для земных радиоволн.
3. Способ по пп.1 или 2, отличающийся тем, что для средних значений углов места каждой группы строят кривые прогнозирования, по каждой гистограмме определяют два первоначальные расстояния и из четырех полученных таким образом расстояний, определяя средневзвешенное значение двух расстояний после их перекрытия, находят окончательное расстояние.
4. Способ по любому из предыдущих пунктов, отличающийся тем, что приходящую волну, принятую антенной из скрещенных под углом 90° рамок, разделяют по обыкновенным и необыкновенным модам.
Текст
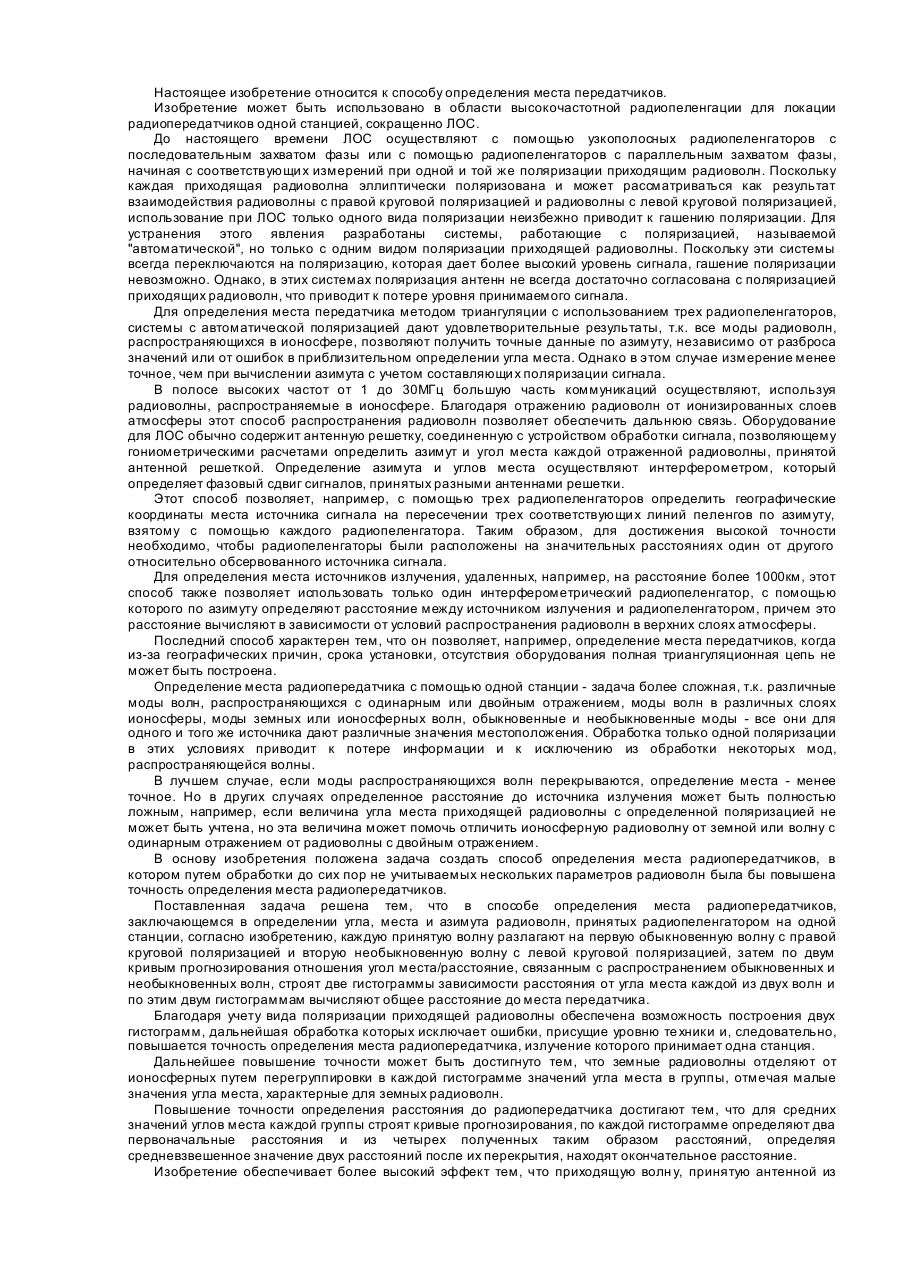
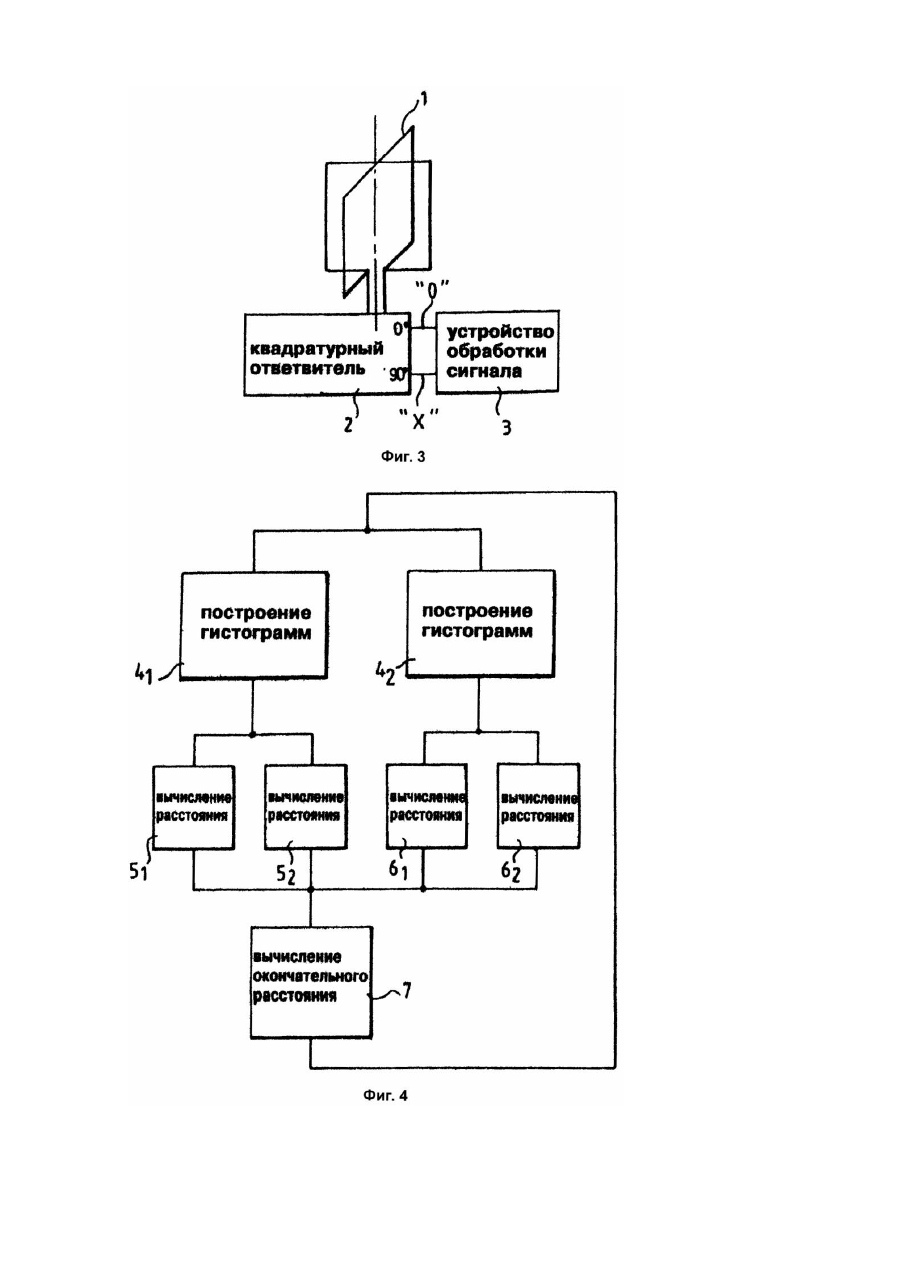
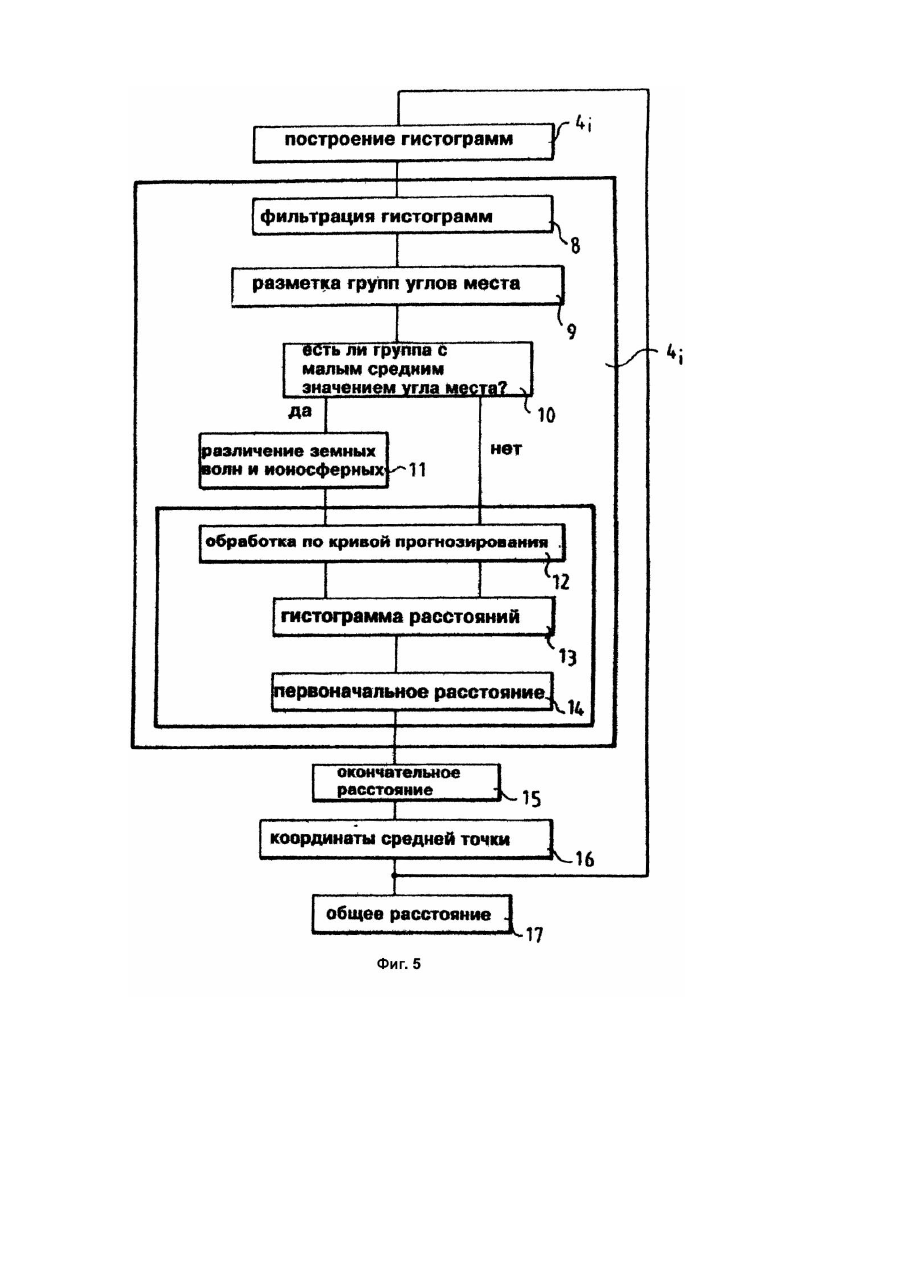
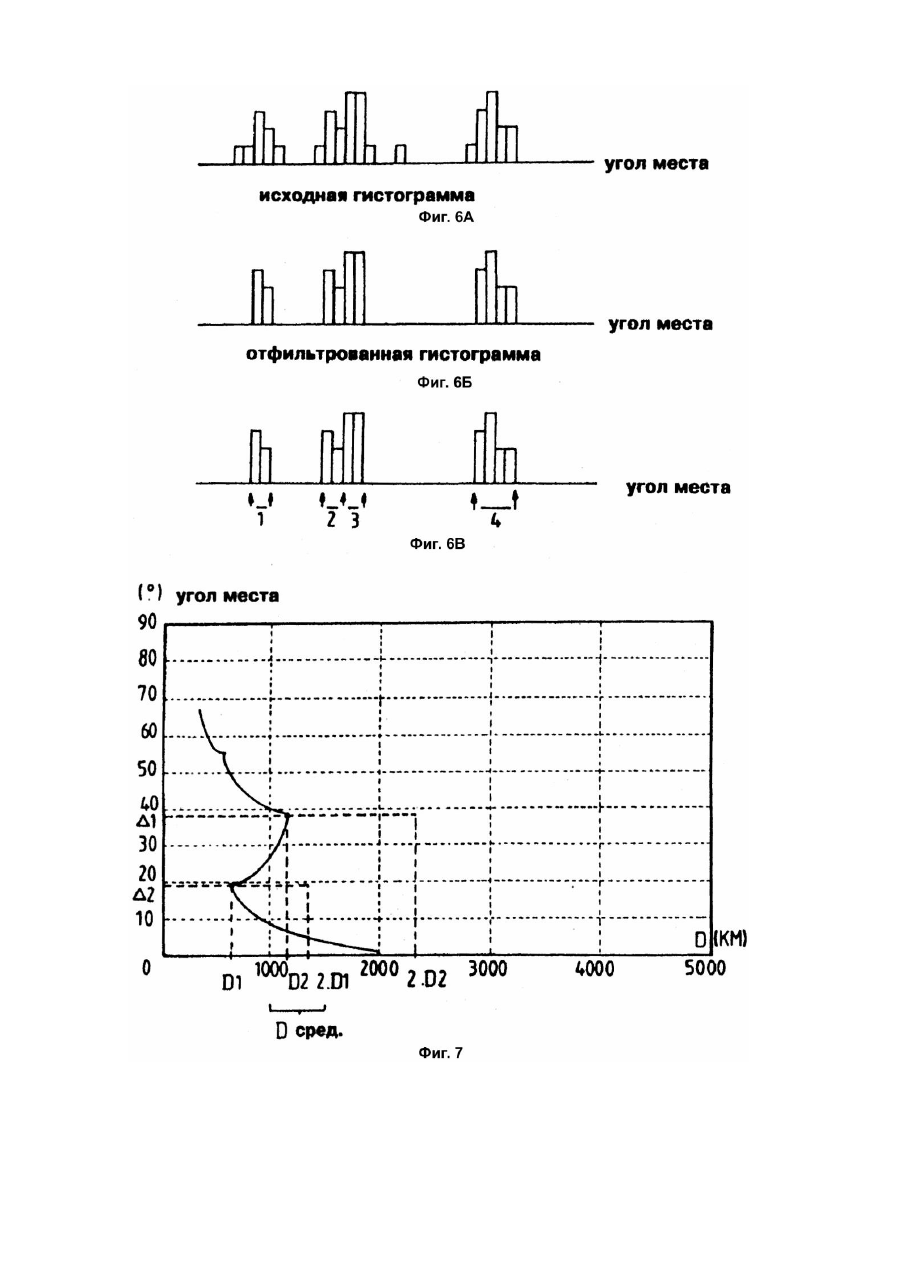
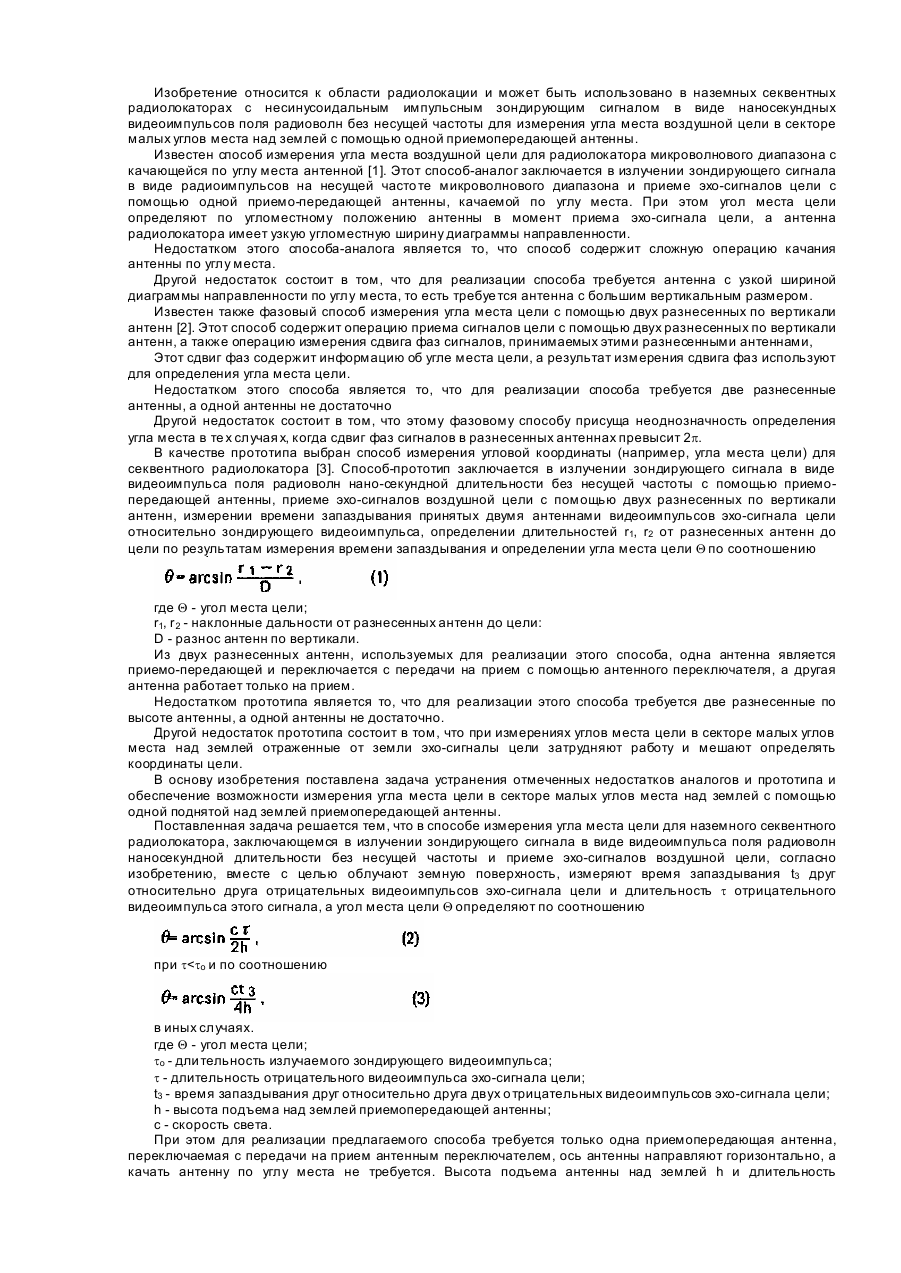
Настоящее изобретение относится к способу определения места передатчиков. Изобретение может быть использовано в области высокочастотной радиопеленгации для локации радиопередатчиков одной станцией, сокращенно ЛОС. До настоящего времени ЛОС осуществляют с помощью узкополосных радиопеленгаторов с последовательным захватом фазы или с помощью радиопеленгаторов с параллельным захватом фазы, начиная с соответствующи х измерений при одной и той же поляризации приходящим радиоволн. Поскольку каждая приходящая радиоволна эллиптически поляризована и может рассматриваться как результат взаимодействия радиоволны с правой круговой поляризацией и радиоволны с левой круговой поляризацией, использование при ЛОС только одного вида поляризации неизбежно приводит к гашению поляризации. Для устранения этого явления разработаны системы, работающие с поляризацией, называемой "автоматической", но только с одним видом поляризации приходящей радиоволны. Поскольку эти системы всегда переключаются на поляризацию, которая дает более высокий уровень сигнала, гашение поляризации невозможно. Однако, в этих системах поляризация антенн не всегда достаточно согласована с поляризацией приходящих радиоволн, что приводит к потере уровня принимаемого сигнала. Для определения места передатчика методом триангуляции с использованием трех радиопеленгаторов, системы с автоматической поляризацией дают удовлетворительные результаты, т.к. все моды радиоволн, распространяющихся в ионосфере, позволяют получить точные данные по азимуту, независимо от разброса значений или от ошибок в приблизительном определении угла места. Однако в этом случае измерение менее точное, чем при вычислении азимута с учетом составляющи х поляризации сигнала. В полосе высоких частот от 1 до 30МГц большую часть коммуникаций осуществляют, используя радиоволны, распространяемые в ионосфере. Благодаря отражению радиоволн от ионизированных слоев атмосферы этот способ распространения радиоволн позволяет обеспечить дальнюю связь. Оборудование для ЛОС обычно содержит антенную решетку, соединенную с устройством обработки сигнала, позволяющему гониометрическими расчетами определить азимут и угол места каждой отраженной радиоволны, принятой антенной решеткой. Определение азимута и углов места осуществляют интерферометром, который определяет фазовый сдвиг сигналов, принятых разными антеннами решетки. Этот способ позволяет, например, с помощью трех радиопеленгаторов определить географические координаты места источника сигнала на пересечении трех соответствующи х линий пеленгов по азимуту, взятому с помощью каждого радиопеленгатора. Таким образом, для достижения высокой точности необходимо, чтобы радиопеленгаторы были расположены на значительных расстояниях один от другого относительно обсервованного источника сигнала. Для определения места источников излучения, удаленных, например, на расстояние более 1000км, этот способ также позволяет использовать только один интерферометрический радиопеленгатор, с помощью которого по азимуту определяют расстояние между источником излучения и радиопеленгатором, причем это расстояние вычисляют в зависимости от условий распространения радиоволн в верхних слоях атмосферы. Последний способ характерен тем, что он позволяет, например, определение места передатчиков, когда из-за географических причин, срока установки, отсутствия оборудования полная триангуляционная цепь не может быть построена. Определение места радиопередатчика с помощью одной станции - задача более сложная, т.к. различные моды волн, распространяющихся с одинарным или двойным отражением, моды волн в различных слоях ионосферы, моды земных или ионосферных волн, обыкновенные и необыкновенные моды - все они для одного и того же источника дают различные значения местоположения. Обработка только одной поляризации в этих условиях приводит к потере информации и к исключению из обработки некоторых мод, распространяющейся волны. В лучшем случае, если моды распространяющихся волн перекрываются, определение места - менее точное. Но в других случаях определенное расстояние до источника излучения может быть полностью ложным, например, если величина угла места приходящей радиоволны с определенной поляризацией не может быть учтена, но эта величина может помочь отличить ионосферную радиоволну от земной или волну с одинарным отражением от радиоволны с двойным отражением. В основу изобретения положена задача создать способ определения места радиопередатчиков, в котором путем обработки до сих пор не учитываемых нескольких параметров радиоволн была бы повышена точность определения места радиопередатчиков. Поставленная задача решена тем, что в способе определения места радиопередатчиков, заключающемся в определении угла, места и азимута радиоволн, принятых радиопеленгатором на одной станции, согласно изобретению, каждую принятую волну разлагают на первую обыкновенную волну с правой круговой поляризацией и вторую необыкновенную волну с левой круговой поляризацией, затем по двум кривым прогнозирования отношения угол места/расстояние, связанным с распространением обыкновенных и необыкновенных волн, строят две гистограммы зависимости расстояния от угла места каждой из двух волн и по этим двум гистограммам вычисляют общее расстояние до места передатчика. Благодаря учету вида поляризации приходящей радиоволны обеспечена возможность построения двух гистограмм, дальнейшая обработка которых исключает ошибки, присущие уровню те хники и, следовательно, повышается точность определения места радиопередатчика, излучение которого принимает одна станция. Дальнейшее повышение точности может быть достигнуто тем, что земные радиоволны отделяют от ионосферных путем перегруппировки в каждой гистограмме значений угла места в группы, отмечая малые значения угла места, характерные для земных радиоволн. Повышение точности определения расстояния до радиопередатчика достигают тем, что для средних значений углов места каждой группы строят кривые прогнозирования, по каждой гистограмме определяют два первоначальные расстояния и из четырех полученных таким образом расстояний, определяя средневзвешенное значение двух расстояний после их перекрытия, находят окончательное расстояние. Изобретение обеспечивает более высокий эффект тем, что приходящую волн у, принятую антенной из скрещенных под углом 90° рамок, разделяют по обыкновенным и необыкновенным модам. Другие характеристики и преимущества изобретения приведены ниже в описании и прилагаемых чертежах. На фиг.1 показано распределение ионизированных слоев земной атмосферы; на фиг.2А - 2Е - несколько мод радиоволн, распространяющихся в слоях ионосферы; на фиг.3 - пример выполнения одного из нескольких приемных трактов радиопеленгатора для осуществления изобретения; на фиг.4 - пример осуществления способа согласно изобретению в виде блок-схемы; на фиг.5 - алгоритм выполнения этапов локации групп по углу места и этапов вычисления расстояния по схеме на фиг.4; на фиг.6 А, 6Б, 6В гистограммы, используемые для определения места радипередатчиков по углу места; на фиг.7 - кривая ионосферного прогнозирования. Как показано на фиг.1, ионосфера - это ионизированная область земной атмосферы, расположенная на расстоянии 50...2000мкм над земной поверхностью. Она состоит из нескольких слоев, а именно, слоев D, E, F1, F2 - причем слой D - это только поглощающая область. Для определенных частоты и угла места в общем случае возможны несколько мод распространяющихся радиоволн, как показано на фиг.2А - 2Е. Для расстояния менее 2500мкм, существуют только простые моды, обозначенные 1E, 1F на фиг.2А, или двойные, обозначенные 2E, 2F на фиг.2Б. Но нет смешанных мод, представленных на фиг.2В - 2Е. Поскольку ионосфера - это анизотропная среда, вообще существуют две характеристические радиоволны, связанные с определенным углом излучения: обыкновенная радиоволна и необыкновенная радиоволна Что касается конфигураций, называемых квазипродольными, которые и отражают действительность, можно показать, что эти две волны имеют круговую поляризацию, соответственно правую и левую. Эти две радиоволны при каждой моде распространяются двумя легкоразличимыми путями. Необыкновенная волна обычно более ослаблена, и имеет несколько больший угол места, чем обыкновенная. Однако, обыкновенные и необыкновенные радиоволны часто распространяются двумя различными путями. Например, обыкновенная радиоволна может распространяться как земная, а необыкновенная будет распространяться, отражаясь от слоя E. В способе согласно изобретению оптимально использованы описанные выше характеристики приходящей радиоволны. Ввиду того, что существуют две разные радиоволны, их обрабатывают раздельно, поскольку каждая из радиоволн несет специфичные данные. Как показано на фиг.3, для осуществления изобретения используют антенны из скрещенных рамок. Два сигнала с выхода антенн 1 комбинируют квадратурным ответвителем 2 гибридного типа. Ответвитель разделяет сигнал, принятый антеннами 1, на сигналы с правой и левой поляризацией, позволяя таким образом отделить обыкновенную волну (0) от необыкновенной (X). Устройство 3 обработки сигнала, или другое эквивалентное устройство, позволяет обрабатывать радиоволны (0) и (X) в реальном масштабе времени. Эта обработка происходит согласно этапам 4 - 7 блок-схемы, представленной на фиг.4, благодаря переключению поляризации с одного вида на другой после каждого первоначального измерения сигнала. На этапах 41 и 42 строят и, с учетом кривых прогнозирования расстояния, обрабатывают две гистограммы расстояния. Две волны (0) и (X) обрабатывают в соответствии с заданным алгоритмом на этапах 5 1, 52 и 61 62 для вычисления первоначальных расстояний, используя две различные кривые прогнозирования первоначального расстояния. Затем на этапе 7 по первоначальным расстояниям, которые однозначно соответствуют кривой прогнозирования, определяют окончательное расстояние. Этот порядок может быть использован в тех случаях, когда обработка сигналов с одной поляризацией дает неоднозначные результаты. Практически, во многих случая х возможно выделить земные радиоволны, отделить простые и двойные отражения, что дает меньшие погрешности в определении места и более высокую точность. Вычисление расстояния до передатчика выполняют для каждой гистограммы 41 как показано на блоксхеме (фиг.5). По результатам определения в реальном масштабе времени правой и левой поляризации радиоволн строят каждую гистограмму определения места по углу места в течение T последних секунд получения первоначальных данных пеленгации, причем T - время получения данных, 1 - й столбик каждой гистограммы содержит число измерений, выполненных на T секунд, которые дали значение угла места в интервале (I°, I + 1°) при данной поляризации. Поскольку различные физические явления, происходящие в ионосфере, приводят к ошибкам и разбросу величин углов прихода принятых сигналов, для исключения незначащих или ошибочных величин и придания большего веса значащим величинам углов места на этапе 8 гистограммы фильтруют. При определенном процентном содержании результатов измерения в каждом столбике гистограмм из совокупности результатов, перегруппировкой столбиков можно построить группы углов места, определенные их пределами, образованными двумя минимумами, и их средневзвешенным значением угла места по весу столбиков, как показано на фиг.6А, 6Б и 6В. Эту перегруппировку выполняют на этапе 9. Анализ двух гисто грамм и совокупности групп, соответствующих каждой из этих гистограмм, и, особенно, малых углов места позволяет на этапах 10 и 11 определить, относится ли принятое излучение к земной радиоволне или радиоволне, пришедшей из ионосферного слоя после одного или нескольких отражений. Этот этап обработки очень важен, т.к. позволяет использовать разнесение поляризации для обработки сигналов в тех случаях, когда использование только одного вида поляризации дает неоднозначные результаты. Практически часто обыкновенная радиоволна распространяется как земная, а необыкновенная - простым отражением от слоя E, или же волна 0 распространяется двойным отражением, а волна X - простым отражением. Обработку прогнозированных значений расстояния производят на этапах 12, 13 и 14. Для выполнения такой обработки можно использовать программное обеспечение, построенное на базе известной программы HRMNTH Международного консультативного комитета по радио (база данных НьюДели). Эта программа позволяет создать файл прогнозирования, относящийся к заданной местности. Затем поданным, полученным с использованием программы HRMNTH, выполняют моделирование в соответствии с рекомендациями Доклада 640 - 4, том VI, Международного консультативного комитета по радио. Это моделирование выполняют, используя формулу Мегглетона (MEGGLETON) для слоя E, модель Дика и Брэдли (DICK & BRADLEY) для мод с долиной и слоя F1, а также модель Брэдли - Дюдени (BRADLEY DUDENEY) для слоя F2. Таким образом, пути распространения радиоволн в ионосфере определяют с помощью программы для прокладки траектории лучей, исходя из знания вертикального распределения электронной плотности. Строят две кривые типа представленных на фиг.7; одну, характерную для обыкновенной моды, другую для необыкновенной. Для времени, даты, частоты и заданной местности, а также для каждой из двух мод файл прогнозирования позволяет получить совокупность расстояний, соответствующи х искомым углам места (гистограммы). Прогноз осуществляют для средних значений углов места каждой группы и для каждой гистограммы. Поскольку каждой гистограмме последовательно соответствует две кривые, на этапе 14 создают четыре таблицы (не приводятся). С помощью этих 4 таблиц на этапах 51 при обработке сигнала для отделения простых и двойных отражений получают 4 первоначальных расстояния и по этим 4 первоначальным расстояниям DGO, DGX, DDO, DDX на этапе 15 перекрытием средневзвешенного значения двух расстояний, наиболее соответствующи х двум различным гистограммам и двум различным кривым распространения, вычисляют окончательное расстояние. С этим расстоянием связаны радиальная ошибка, продольная ошибка, весовой коэффициент и переменная, указывающая, присутствуе т ли в одной из гистограмм мода с двойным отражением. Радиальная ошибка прямо зависит от стандартного отклонения азимута. Продольная ошибка зависит от качества первоначальных измерений и от разброса величин углов места, полученных в результате эти х измерений. Эти две ошибки определяют доверительный интервал определения места (эллипс погрешности). После каждой операции определения расстояния на этапе 16 вычисляют географические координаты, не только для выдачи их оператору, но и для использования в вычислительном устройстве. Это позволяет с помощью адаптивной обработки, не представленной на блок схеме, выдавать текущие прогнозируемые значения для средней точки, соответствующей предварительно вычисленному расстоянию, пока оператор работает с одним и тем же передатчиком. Во время первого определения места этим координатам присваивают значения координат пеленгатора. Пока оператор работает с одним и тем же передатчиком, например, две секунды, новое значение расстояния может храниться в буферном регистре. Согласно этапу 17 оператор в любой момент может запросить общее местоположение, определенное по предварительно вычисленным N первоначальным расстояниям.
ДивитисяДодаткова інформація
Автори англійськоюLeroux Csavier, Chovel Didier
Автори російськоюЛеру Ксавье, Шовель Дидье
МПК / Мітки
МПК: G01S 5/12
Мітки: визначення, радіопередавачів, місця, спосіб
Код посилання
<a href="https://ua.patents.su/7-26161-sposib-viznachennya-miscya-radioperedavachiv.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення місця радіопередавачів</a>
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: місця, вимірювання, цілі, спосіб, кута, секвентного, наземного, радіолокатора
Формула / Реферат:
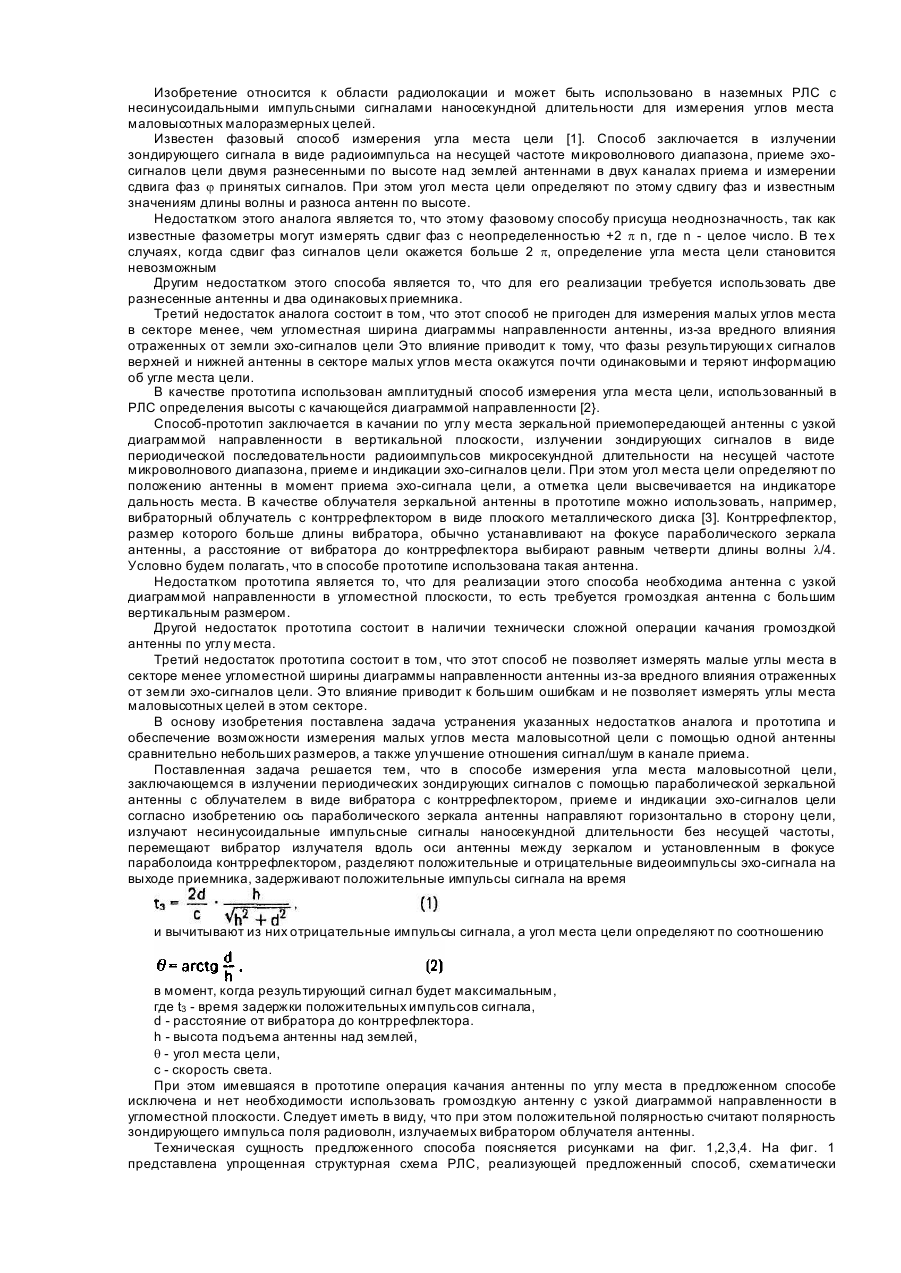
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Спосіб вимірювання кута місця маловисотної цілі
Номер патенту: 13422
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: місця, вимірювання, кута, маловисотної, цілі, спосіб
Формула / Реферат:
Способ измерения угла места маловысотной цели, заключающийся в излучении периодических зондирующих сигналов с помощью параболической зеркальной антенны с облучателем в виде вибратора с контррефлектором, приеме и индикации эхо-сигналов цели, отличающийся тем, что ось параболического зеркала антенны направляют горизонтально в сторону цели, излучают несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты,...
Спосіб визначення місця витоку в трубопроводі
Номер патенту: 12637
Опубліковано: 28.02.1997
Автори: Царік Микола Федотович, Білик Володимир Сергійович, Петимко Павло Ілліч, Бердак Василь Кирилович, Наливайко Сергій Борисович, Хомяков Валерій Васильович
Мітки: визначення, місця, витоку, трубопроводі, спосіб
Формула / Реферат:
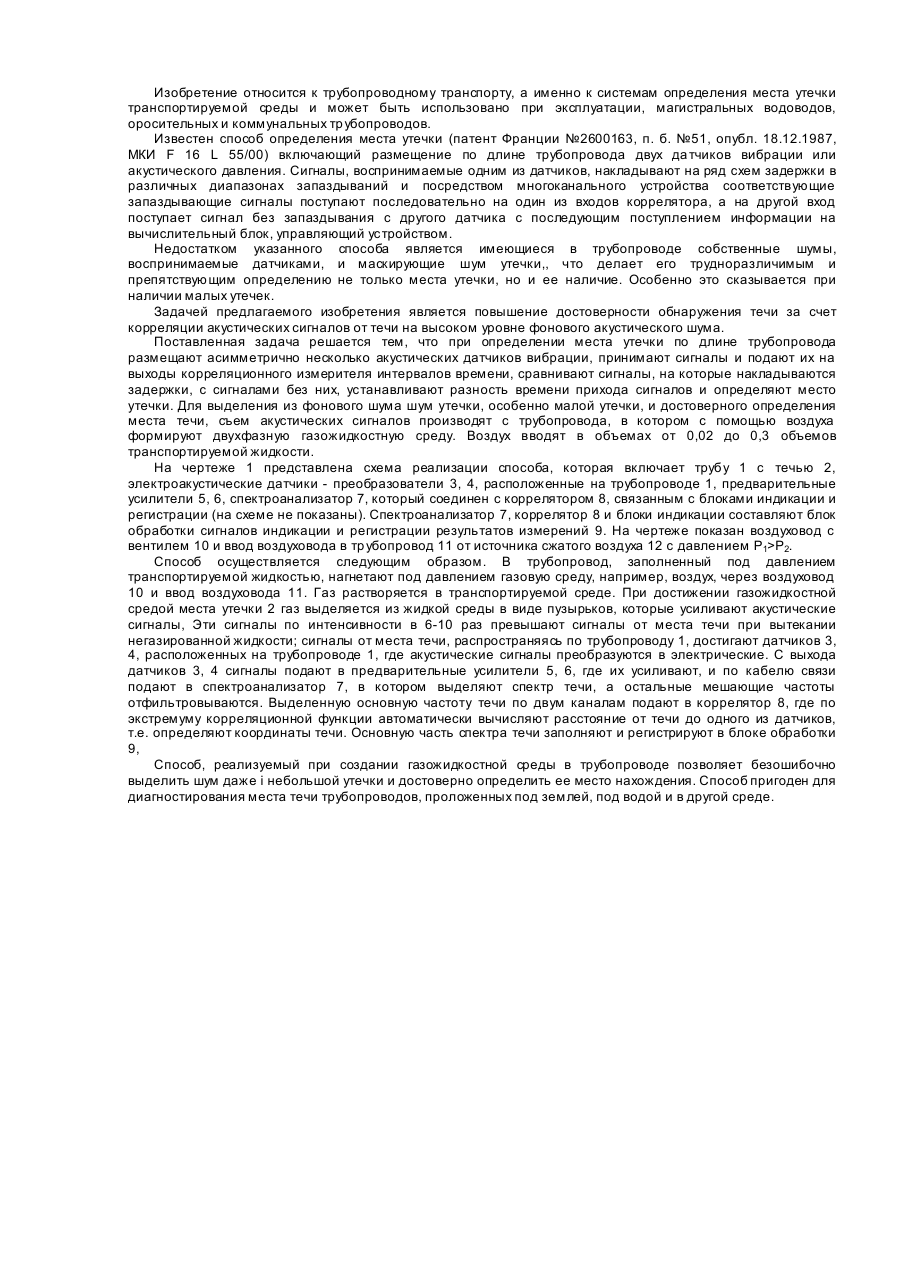
1. Способ определения места утечки в трубопроводе, включающий съем акустических сигналов с двух различных точек по длине трубопровода с транспортируемой жидкостью, преобразование их в электрический сигнал, задержку одного из сигналов, сложение задержанного и незадержанного сигналов, выделение из суммарного сигнала спектра течи и определение расстояния от течи до одного из датчиков по экстремуму корреляционной функции из сигнала спектра...
Спосіб дистанційного визначення місця пошкодження газопроводу
Номер патенту: 16808
Опубліковано: 29.08.1997
Автор: Зінін Юрій Сергійович
МПК: F17D 5/02
Мітки: місця, газопроводу, пошкодження, спосіб, визначення, дистанційного
Формула / Реферат:
Способ дистанционного определения места повреждения газопровода, заключающийся в установке четырех датчиков давления по два на каждом из концов контролируемого участка,. отличающийся тем, что, с целью повышения надежности определения аварии на контролируемом участке, обрабатывают сигналы групп из трех последовательно установленных датчиков, определяют изменепиефазы и амплитуды гармонических составляющих отклонений давлений от...
Спосіб визначення місця витоку у ємкостях, працюючих під тиском
Номер патенту: 6014
Опубліковано: 29.12.1994
Автори: Бернхард Тіль, Гюнтер Штіпсітс, Вільгельм Лойкер
МПК: G01N 29/14, G21C 17/00, G01M 3/24
Мітки: витоку, працюючих, ємкостях, тиском, місця, спосіб, визначення
Формула / Реферат:
1. Способ определения места утечки в емкостях, работающих под давлением, заключающийся в том, что определяют пороговое значение фонового шума путем измерения фоновых высокочастотных звуковых шумов емкости, регистрируют высокочастотные звуковые шумы от течи с помощью по меньшей мере двух зондов, установленных на стенках емкости, зарегистрированные сигналы усиливают, сравнивают эффективное значение их интенсивности с пороговым значением...
Попередній патент: Коронкознімач
Наступний патент: Спосіб безперервного варіння сусла, спосіб отримання пива і пиво
Випадковий патент: М'ясний продукт запечений