Спосіб вимірювання кута місця маловисотної цілі
Номер патенту: 13422
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
Формула / Реферат
Способ измерения угла места маловысотной цели, заключающийся в излучении периодических зондирующих сигналов с помощью параболической зеркальной антенны с облучателем в виде вибратора с контррефлектором, приеме и индикации эхо-сигналов цели, отличающийся тем, что ось параболического зеркала антенны направляют горизонтально в сторону цели, излучают несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты, перемещают вибратор облучателя вдоль оси антенны между зеркалом и установленным в фокусе параболоида контррефлектором, разделяют положительные и отрицательные видеоимпульсы эхо-сигнала на выходе приемника, задерживают положительные импульсы сигнала на время
и вычитают из них отрицательные импульсы сигнала, а угол места цели определяют по соотношению
в момент, когда результирующий сигнал будет максимальным,
где t3 - время задержки положительных импульсов сигнала;
d - расстояние от вибратора до контррефлектора;
h - высота подъема антенны над землей;
q - угол места цели;
с - скорость света.
Текст
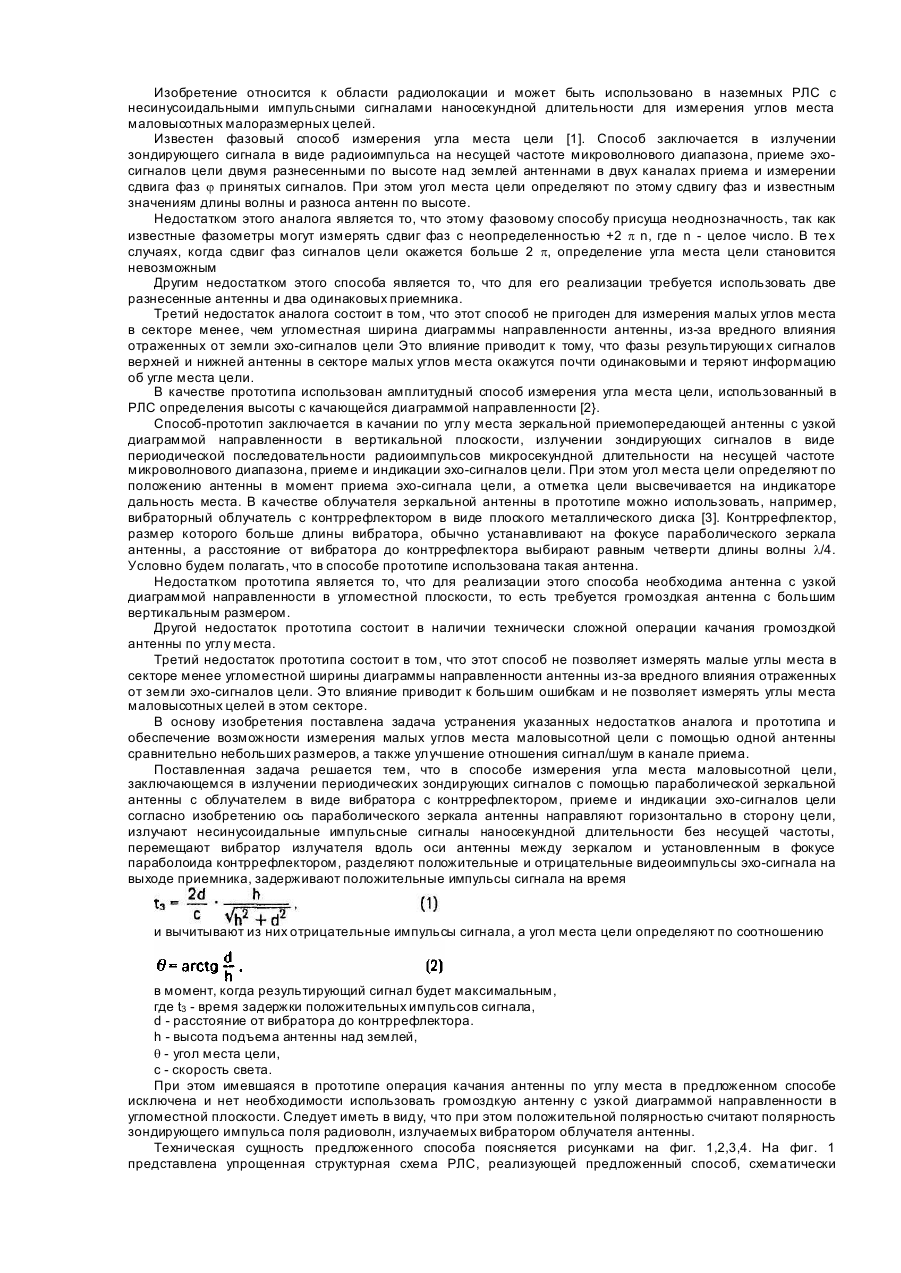
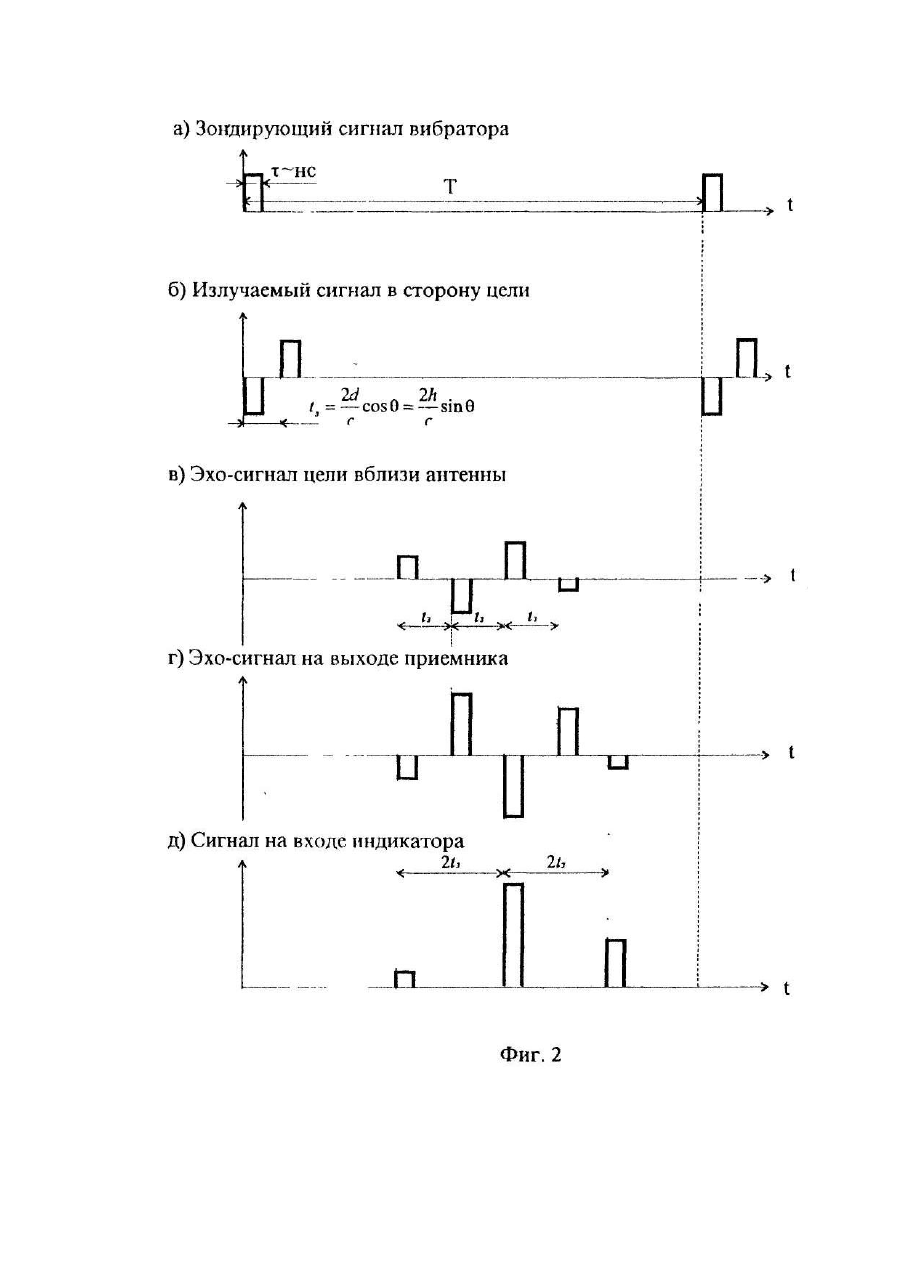
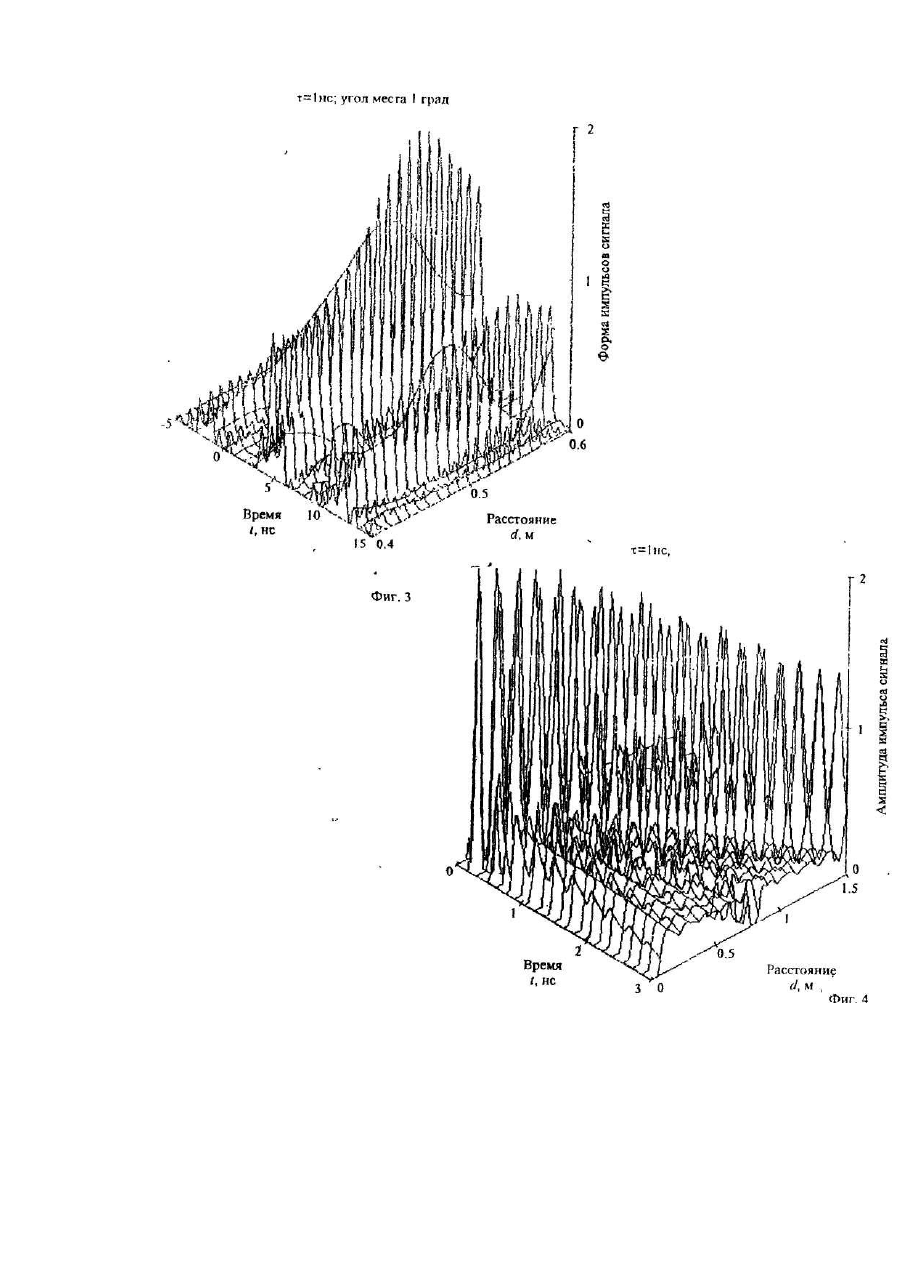
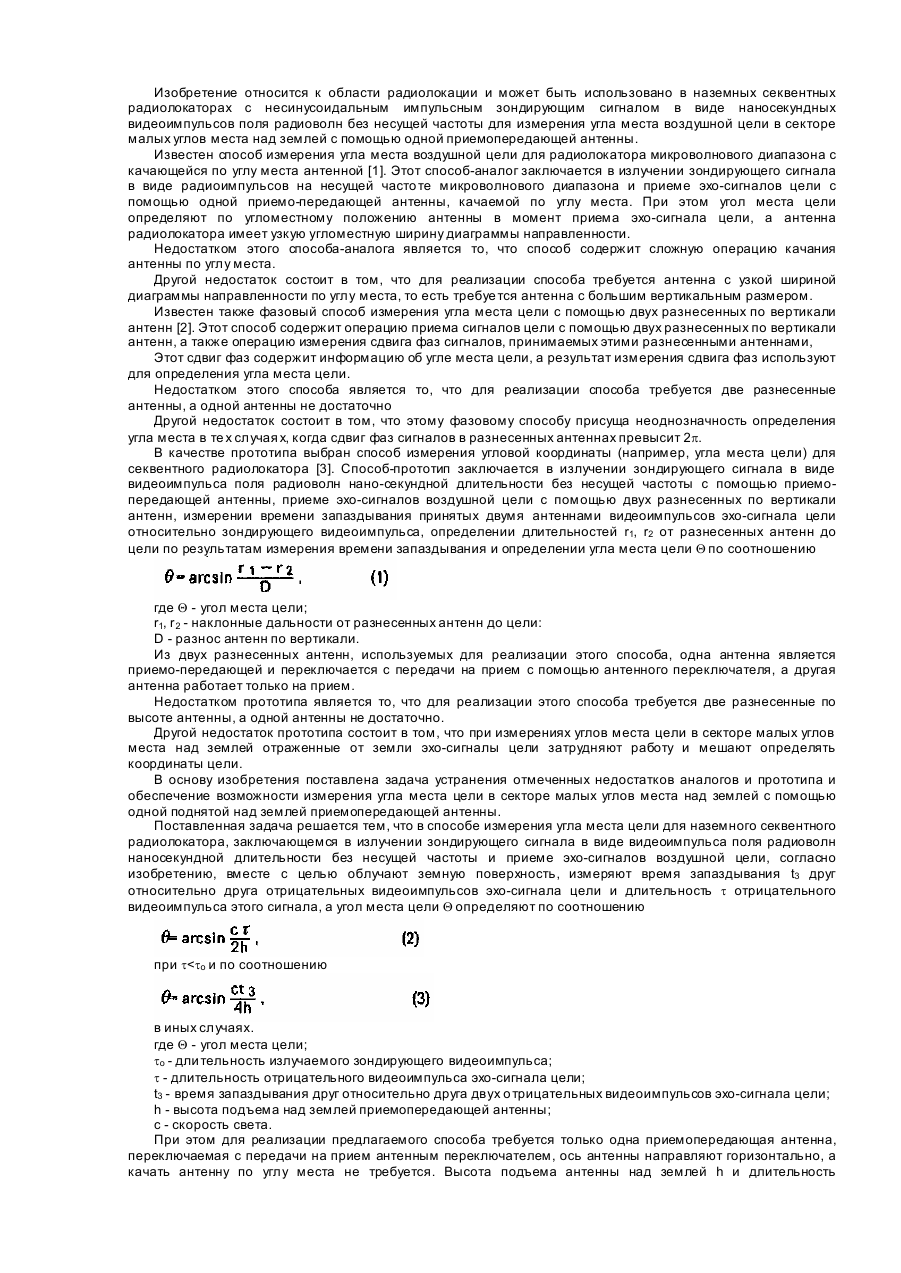
Изобретение относится к области радиолокации и может быть использовано в наземных РЛС с несинусоидальными импульсными сигналами наносекундной длительности для измерения углов места маловысотных малоразмерных целей. Известен фазовый способ измерения угла места цели [1]. Способ заключается в излучении зондирующего сигнала в виде радиоимпульса на несущей частоте микроволнового диапазона, приеме эхосигналов цели двумя разнесенными по высоте над землей антеннами в двух каналах приема и измерении сдвига фаз j принятых сигналов. При этом угол места цели определяют по этому сдвигу фаз и известным значениям длины волны и разноса антенн по высоте. Недостатком этого аналога является то, что этому фазовому способу присуща неоднозначность, так как известные фазометры могут измерять сдвиг фаз с неопределенностью +2 p n, где n - целое число. В те х случаях, когда сдвиг фаз сигналов цели окажется больше 2 p, определение угла места цели становится невозможным Другим недостатком этого способа является то, что для его реализации требуется использовать две разнесенные антенны и два одинаковых приемника. Третий недостаток аналога состоит в том, что этот способ не пригоден для измерения малых углов места в секторе менее, чем угломестная ширина диаграммы направленности антенны, из-за вредного влияния отраженных от земли эхо-сигналов цели Это влияние приводит к тому, что фазы результирующи х сигналов верхней и нижней антенны в секторе малых углов места окажутся почти одинаковыми и теряют информацию об угле места цели. В качестве прототипа использован амплитудный способ измерения угла места цели, использованный в РЛС определения высоты с качающейся диаграммой направленности [2}. Способ-прототип заключается в качании по углу места зеркальной приемопередающей антенны с узкой диаграммой направленности в вертикальной плоскости, излучении зондирующих сигналов в виде периодической последовательности радиоимпульсов микросекундной длительности на несущей частоте микроволнового диапазона, приеме и индикации эхо-сигналов цели. При этом угол места цели определяют по положению антенны в момент приема эхо-сигнала цели, а отметка цели высвечивается на индикаторе дальность места. В качестве облучателя зеркальной антенны в прототипе можно использовать, например, вибраторный облучатель с контррефлектором в виде плоского металлического диска [3]. Контррефлектор, размер которого больше длины вибратора, обычно устанавливают на фокусе параболического зеркала антенны, а расстояние от вибратора до контррефлектора выбирают равным четверти длины волны l/4. Условно будем полагать, что в способе прототипе использована такая антенна. Недостатком прототипа является то, что для реализации этого способа необходима антенна с узкой диаграммой направленности в угломестной плоскости, то есть требуется громоздкая антенна с большим вертикальным размером. Другой недостаток прототипа состоит в наличии технически сложной операции качания громоздкой антенны по углу места. Третий недостаток прототипа состоит в том, что этот способ не позволяет измерять малые углы места в секторе менее угломестной ширины диаграммы направленности антенны из-за вредного влияния отраженных от земли эхо-сигналов цели. Это влияние приводит к большим ошибкам и не позволяет измерять углы места маловысотных целей в этом секторе. В основу изобретения поставлена задача устранения указанных недостатков аналога и прототипа и обеспечение возможности измерения малых углов места маловысотной цели с помощью одной антенны сравнительно небольших размеров, а также улучшение отношения сигнал/шум в канале приема. Поставленная задача решается тем, что в способе измерения угла места маловысотной цели, заключающемся в излучении периодических зондирующих сигналов с помощью параболической зеркальной антенны с облучателем в виде вибратора с контррефлектором, приеме и индикации эхо-сигналов цели согласно изобретению ось параболического зеркала антенны направляют горизонтально в сторону цели, излучают несинусоидальные импульсные сигналы наносекундной длительности без несущей частоты, перемещают вибратор излучателя вдоль оси антенны между зеркалом и установленным в фокусе параболоида контррефлектором, разделяют положительные и отрицательные видеоимпульсы эхо-сигнала на выходе приемника, задерживают положительные импульсы сигнала на время и вычитывают из них отрицательные импульсы сигнала, а угол места цели определяют по соотношению в момент, когда результирующий сигнал будет максимальным, где t3 - время задержки положительных импульсов сигнала, d - расстояние от вибратора до контррефлектора. h - высота подъема антенны над землей, q - угол места цели, с - скорость света. При этом имевшаяся в прототипе операция качания антенны по углу места в предложенном способе исключена и нет необходимости использовать громоздкую антенну с узкой диаграммой направленности в угломестной плоскости. Следует иметь в виду, что при этом положительной полярностью считают полярность зондирующего импульса поля радиоволн, излучаемых вибратором облучателя антенны. Техническая сущность предложенного способа поясняется рисунками на фиг. 1,2,3,4. На фиг. 1 представлена упрощенная структурная схема РЛС, реализующей предложенный способ, схематически показаны зеркальная антенна с облучателем из вибратора и контррефлектора, схема запитки вибратора антенны фидерной линией, поверхность земли и лучи радиоволн от антенны до цели. На фиг. 2 представлены упрощенные эпюры зондирующего сигнала и эхо-сигналов цели вблизи антенны, на выходе приемника и на входе индикатора. На фиг. 3 представлена расчетная зависимость формы импульса сигнала на входе индикатора РЛС от расстояния d между вибратором и контррефлектором, а на фиг. 4 - зависимость максимальной амплитуды импульса сигнала на входе индикатора от угла места цели и положения вибратора d. Пример реализации предложенного способа представлен на фиг. 1, где показана упрощенная структурная схема РЛС, реализующей этот способ. В состав этой РЛС входят следующие элементы: зеркало антенны 1 в виде параболоида вращения из проводящего материала (ось зеркала направлена горизонтально в сторону цели); вибратор облучателя антенны 2 длиной I 2rm/с, где r m - максимальная дальность цели, с - скорость света, длительность порядка 1 не и менее и условно показан на фиг.2а. Этот сигнал излучается вибратором 2 в виде коротких видеоимпульсов поля радиоволн без несущей частоты. Радиоволны вибратора 2 отражаются от зеркала 1, а также от контррефлектора 3 и зеркала 1. В результате каждому импульсу вибратора 2 будет соответствовать два импульса, излучаемых антенной. В предложенном способе использовано известное свойство несинусоидальных импульсных сигналов изменять полярность импульса поля радиоволн при отражении от металлических поверхностей и земли [4]. Антенна будет излучать периодическую последовательность пары видеоимпульсов поля радиоволн, первый из которых будет отрицательным, а второй положительным как показано на фиг.2б. Время запаздывания t3 этих импульсов друг относительно друга зависит от расстояния d между вибратором 2 и контррефлектором 3 и определяется соотношением где q - угломестное направление излучения Излученные антенной радиоволны распространяются от антенны до цели и обратно по следующим четырем возможным путям 1) антенна - цель - антенна; 2)антенна - цель - земля - антенна; 3)антенна - земля - цель - антенна; 4) антенна - земля - цель - земля -антенна. Самым коротким будет первый путь. Второй и третий будут одинаковы по длине и время запаздывания импульса на них относительно импульса первого пути будет равно где h - высота подъема антенны над землей; q - угол места цели. При каждом отражении радиоволн от земли или цели полярность импульса поля радиоволн будет изменяться на противоположную. В результате каждому зондирующему импульсу антенны будет соответствовать три импульса эхо-сигнала цели, два из которых соответствуют первому и четвертому путям и имеют полярность, противоположную зондирующему импульсу антенны, а импульс эхо-сигнала, соответствующий второму и третьему путям вместе, будет совпадать по полярности с зондирующим импульсом антенны. Суть предлагаемого способа основана на том, чтобы подобрать такое расстояние d между вибратором 2 и контррефлектором 3 при котором выполняется условие. для направления q в сторону цели, и обеспечить максимальное значение амплитуды импульса сигнала на входе индикатора 15 путем подходящего сложения импульсов при выполнении условия (5). В каждом периоде следования антенна излучает два зондирующи х импульса противоположной полярности, условно показанные на фиг. 2б, а эхо-сигнал цели вблизи антенны при выполнении условия (5) будет состоять из четырех импульсов, условно показанных на фиг.2в (при невыполнении условия (5) эхосигнал вблизи антенны состоял бы из шести импульсов). При приеме сигнала радиоволны отражаются от зеркала 1 и контррефлектора 3. В результате изменяется полярность некоторых импульсов,а количество импульсов в общем случае удваивается. При выполнении условия (5) эхо-сигнал на выходе приемника 9 будет выглядеть примерно так, как показано на фиг. 2, так как некоторые импульсы, совпадающие по времени прихода, сложатся. Положительные и отрицательные импульсы сигнала на выходе приемника 9 разделяют с помощью широкополосных диодов 10,11, подключенных в противоположной полярности. После этого положительные импульсы задерживают с помощью линии задержки 12 на время t3=t31=t 32 , определяемое соотношением (1), и вычитают из них отрицательные импульсы сигнала с помощью широкополосного устройства вычитания 13. В результате на выходе устройства вычитания сигнал (при выполнении условия (5)) будет выглядеть примерно так, как показано на фиг. 2д. Этот сигнал состоит из трех импульсов, первый из которых соответствует прямой радиоволне (первый путь), а второй почти в восемь раз превышает по амплитуде первый импульс. Найдя положение вибратора 2 d, при котором средний импульс эхо-сигнала цели на выходе устройства вычитания 13 будет максимальным, можно определить угол места цели q по соотношению (2). Соотношения (1), (2) получены из (3), (4) при выполнении условия (5). Способ предназначен для измерения малых углов места маловысотных целей и не требует качания антенны по углу места. При этом рабочий угломестный сектор будет где fa - фокусное расстояние параболического зеркала антенны. О возможности реализации этого способа можно судить по расчетным графикам на фиг. 3,4. На фиг. 3 показаны форма импульсов (зависимость от времени t) сигнала на выходе индикатора 15 в зависимости от расстояния d между вибратором 2 и контррефлектором 3 при угле места цели q=1°. На фиг. 4 показана зависимость амплитуды импульса сигнала на входе индикатора 15 от угла места цели q и расстояния d. Эти расчеты выполнены для зондирующего сигнала с длительностью импульса t=1нс и антенны с вертикальным размером L=3м, фокусным расстоянием fa = 4м и контррефлектором размером 0,6м. При этом полагалось, что полоса пропускания приемника была 1 Ггц, а высота подъема антенны над землей равнялось h=30м. Как видно из этих рисунков, при правильном выборе расстояния d от вибратора до контррефлектора амплитуда результирующего импульса сигнала на выходе существенно возрастает и сигнал может быть обнаружен на фоне собственных шумов приемника. Предложенный способ позволяет определить угол места цели по максимуму сигнала на входе индикатора 15 и значительно улучшает отношение сигнал/шум в канале приема, При невыполнении условия (5) сигнал развалился бы на 12 импульсов малой амплитуды и был бы потерян в шумах приемника. Для достижения положительного эффекта в предложенном способе используются отраженные от земли радиоволны, которые в прототипе обычно мешают измерять малые углы места и снижают точность измерений. Ось антенны следует направить горизонтально в сторону цели, так как при этом дальность обнаружения маловысотных целей будет больше, а также для того, чтобы эффективнее использовать отраженные от земли радиоволны. Для реализации способа целесообразно использовать радиоволны горизонтальной поляризации, так как они лучше отражаются от земли, чем при вертикальной поляризации. В способе принципиально необходимо использовать несинусоидальные импульсные сигналы в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты, так как способ основан на использовании специальных свойств таких сигналов, а обычные радиоимпульсные сигналы микроволнового диапазона такими свойствами не обладают. Таким образом предложенный способ может быть практически реализован, а отмеченные выше отличительные признаки являются существенными и принципиально необходимы для реализации способа. В предложенном способе не требуется разнесенной антенной системы и отсутствуе т неоднозначность, присущая фазовому способу-аналогу, а также не требуется имевшаяся в прототипе операция качания антенны по углу места. Предложенное техническое решение обеспечивает измерение малых углов над землей маловысотной малоразмерной цели с помощью одной антенны с широкой диаграммой направленности в угломестной плоскости и сравнительно небольшими размерами, а также существенно улучшает отношение сигнал/шум в канале приема. Это представляет значительное преимущество по сравнению со способом-прототипом, в котором для измерения угла места требуется громоздкая антенна с большим вертикальным размером и операция качания такой антенны в угломестной плоскости.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for measurement of angle of elevation of low target
Автори англійськоюZhukov Serhii Anatoliiovych, Bakhvalov Borys Mykolaiovych, Rodin Oleksandr Valeriiovych
Назва патенту російськоюСпособ измерения угла места маловысотной цели
Автори російськоюЖуков Сергей Анатольевич, Бахвалов Борис Николаевич, Родин Александр Валериевич
МПК / Мітки
МПК: G01S 17/06
Мітки: спосіб, маловисотної, вимірювання, цілі, кута, місця
Код посилання
<a href="https://ua.patents.su/6-13422-sposib-vimiryuvannya-kuta-miscya-malovisotno-cili.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання кута місця маловисотної цілі</a>
Спосіб вимирювання кута місця цілі для наземного секвентного радіолокатора
Номер патенту: 13417
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Жуков Сергій Анатолійович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: наземного, секвентного, цілі, вимірювання, радіолокатора, кута, спосіб, місця
Формула / Реферат:
Способ измерения угла места цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульса поля радиоволн наносекундной длительности без несущей частоты и приеме эхо-сигналов воздушной цели, отличающийся тем, что вместе с целью облучают земную поверхность, измеряют время запаздывания t3 друг относительно друга отрицательных видеоимпульсов эхо-сигнала цели и длительность t отрицательного...
Радіолокаційний вимірювач кута місця цілі
Номер патенту: 13421
Опубліковано: 16.12.1996
Автори: Бахвалов Борис Миколайович, Родін Олександр Валерійович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: вимірювач, цілі, місця, радіолокаційний, кута
Формула / Реферат:
Радиолокационный измеритель угла места цели, содержащий передатчик, приемник, индикатор и приемо-передающую антенну с антенным переключателем, согласно изобретению передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, антенна выполнена в виде вибраторной решетки с плоским металлическим рефлектором, в которой расстояние между вибраторами по высоте равно высоте h подъема нижнего...
Спосіб вимірювання кутових координат цілі для наземного секвентного радіолокатора
Номер патенту: 13419
Опубліковано: 16.12.1996
Автори: Жуков Сергій Анатолійович, Бахвалов Борис Миколайович, Родін Олександр Валерійович
МПК: G01S 17/06
Мітки: координат, цілі, спосіб, кутових, радіолокатора, секвентного, вимірювання, наземного
Формула / Реферат:
Способ измерения угловых координат цели для наземного секвентного радиолокатора, заключающийся в излучении зондирующего сигнала в виде видеоимпульсов поля радиоволн наносекундной длительности без несущей частоты и приеме видеоимпульсов эхо-сигнала воздушной цели, отличающийся тем, что излучение и прием осуществляют с помощью одной приемо-передающей вибраторной антенны с плоским металлическим рефлектором, наблюдают принятые видеоимпульсы...
Вимірювач азимуту і кута місця для трикоординатної рлс
Номер патенту: 13418
Опубліковано: 16.12.1996
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: трикоординатної, азимуту, рлс, місця, вимірювач, кута
Формула / Реферат:
Измеритель азимута и угла места для трехкоординатной РЛС, содержащий передатчик с передающей антенной, приемник и индикатор, отличающийся тем, что передатчик выполнен для несинусоидальных импульсных сигналов наносекундной длительности без несущей частоты, приемная антенна выполнена в виде вибраторной антенной решетки с уголковым рефлектором из двух взаимно перпендикулярных проводящих плоскостей, в которой удаление ближнего вибратора от...
Пристрій для уточнення місця електричного пробою ізоляції кабеля
Номер патенту: 2717
Опубліковано: 26.12.1994
Автор: Сейдер Едуард Самуїлович
МПК: G01R 31/08
Мітки: місця, пробою, пристрій, уточнення, кабеля, електричного, ізоляції
Формула / Реферат:
Устройство для уточнення места электрического пробоя изоляции кабеля, содержащее электромагнитный канал, включающий блок формирования сигнала блокировки и последовательно соединенные первый блок преобразования, первый предварительный усилитель, первый полосовой фильтр и первый оконечный усилитель, а также акустический канал, включающий последовательно соединенные второй блок преобразования, второй предварительный усилитель, второй...
Попередній патент: Радіолокаційний вимірювач кута місця цілі
Наступний патент: Спосіб вимірювання азимуту повітряних цілей
Випадковий патент: Матричний пристрій для піднесення в квадрат