Цифровий фільтр з лінійною дельта-модуляцією
Номер патенту: 36645
Опубліковано: 16.06.2003
Автори: Гудима Олег Ярославович, Войтович Анатолій Михайлович, Никифорук Богдан Васильович, Дурняк Богдан Васильович, Тимченко Олександр Володимирович


Формула / Реферат
Цифровий фільтр з лінійною дельта-модуляцією, що містить тактовий генератор, модулятор лінійної дельта-модуляції, інформаційний вхід якого є входом фільтра, блок мультиплексування, перші інформаційні входи якого підключені до виходів блока оперативної пам'яті, перший нагромаджуючий суматор, виходи якого з'єднані з інформаційними входами другого нагромаджуючого суматора, виходи якого є першими виходами фільтра і з'єднані з входами цифро-аналогового перетворювача, вихід якого є другим виходом фільтра, перший лічильник, розрядні виходи якого з'єднані з адресними входами блока оперативної пам'яті, керуючий вхід якого об'єднаний з керуючим входом блока мультиплексування і підключений до виходу елемента АБО-НІ, входи якого об'єднані з першими адресними входами блока постійної пам'яті і підключені до розрядних виходів другого лічильника, який відрізняється тим, що в нього введені регістр зсуву, перший і другий буферні регістри, третій і четвертий лічильники, інформаційний вхід регістра зсуву підключений до виходу модулятора, розрядні виходи регістра зсуву підключені до інформаційних входів першого буферного регістра, виходи якого з'єднані з інформаційними входами блока оперативної пам'яті і другими інформаційними входами блока мультиплексування, виходи якого підключені до других адресних входів блока постійної пам'яті, виходи якого з'єднані з інформаційними входами першого нагромаджуючого суматора, тактовий вхід якого об'єднаний з лічильними входами першого і другого лічильників і підключений до виходу переповнення четвертого лічильника, лічильний вхід якого об'єднаний з однойменним входом третього лічильника і підключений до виходу тактового генератора, вихід переповнення третього лічильника з'єднаний з тактовими входами модулятора і регістра зсуву, тактові входи першого і другого буферних регістрів об'єднані з тактовим входом другого нагромаджуючого суматора, входом дозволу попереднього встановлення першого лічильника і підключені до виходу елемента АБО-HІ, інформаційні входи другого буферного регістра підключені до розрядних виходів першого лічильника, інформаційні входи якого підключені до виходів другого буферного регістра.
Текст
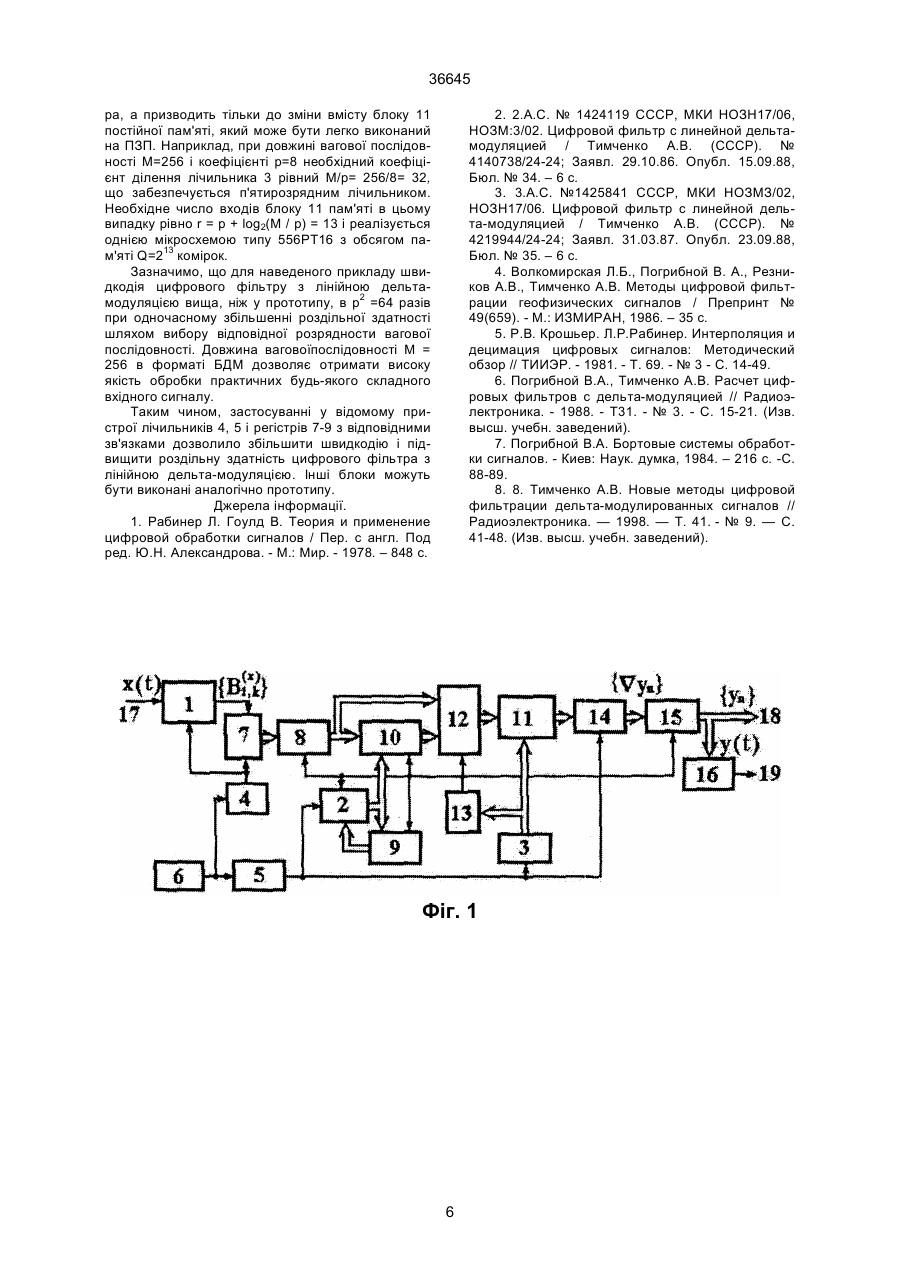
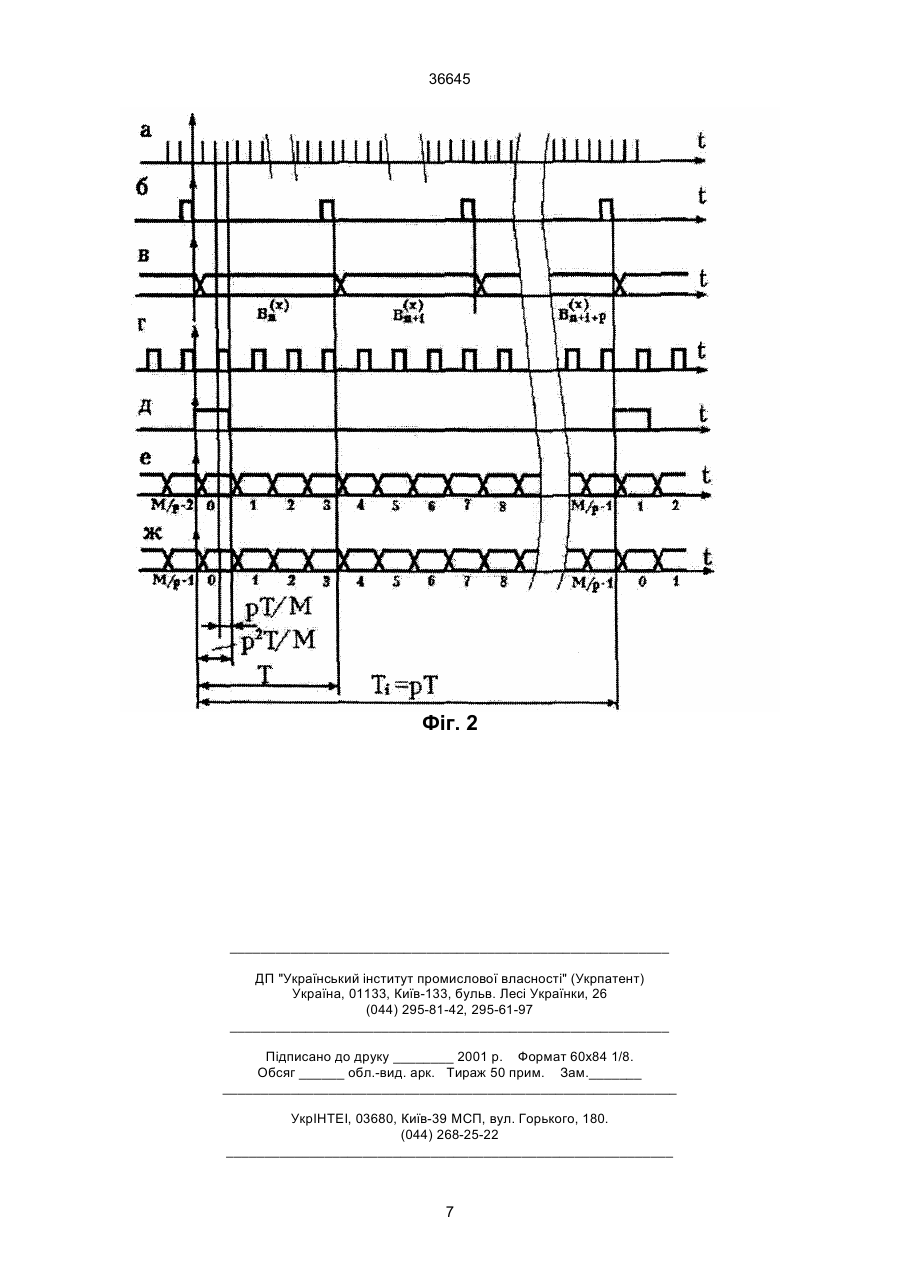
Цифровий фільтр з лінійною дельта-модуляцією, що містить тактовий генератор, модулятор лінійної дельта-модуляції, інформаційний вхід якого є входом фільтра, блок мультиплексування, перші інформаційні входи якого підключені до виходів блока оперативної пам'яті, перший накопичуючий суматор, виходи якого з'єднані з інформаційними входами другого накопичуючого суматора, виходи якого є першими виходами фільтра і з'єднані з входами цифро-аналогового перетворювача, вихід якого є другим виходом фільтра, перший лічильник, розрядні виходи якого з'єднані з адресними входами блока оперативної пам'яті, керуючий вхід якого об'єднаний з керуючим входом блока мультиплексування і підключений до-виходу елемента. АБО-НЕ, входи якого об'єднані з першими адресними входами блока постійної пам'яті і підключені до розрядних виходів другого лічильни A (54) ЦИФРОВИЙ ФІЛЬТР З ЛІНІЙНОЮ ДЕЛЬТА-МОДУЛЯЦІЄЮ 36645 АБО, формувач переднього фронту, мультиплексор [2]. В цьому цифровому фільтрі як вхідний сигнал, так і вагові коефіцієнти подані в форматі лінійної дельта-модуляції, що дозволило отримати максимальне спрощення і високу швидкість виконання операції множення. Попереднє перетворення імпульсної характеристики дозволило різко скоротити число ненульових членів, що зменшило число операцій для обчислення цифрової згортки сигналів в форматі лінійної дельта-модуляції. Однак, в кожному такті роботи відомого пристрою на формування послідовності адрес блоків постійної і оперативної пам'яті витрачається значна частина часу. Це пояснюється тим, що послідовності адрес блоків пам'яті у відомому пристрої формуються за допомогою лічильників, блока постійної пам'яті і суматора, що призводить до затримки формування адрес, пропорційної сумарній затримці розповсюдження сигналу в цих блоках, а значить призводить до значних непродуктивних витрат часу і відповідного обмеження швидкодії відомого пристрою. Крім того, швидкодія відомого цифрового фільтра, обмежена значним числом арифметичних операцій, що виконуються в фільтрі за одиницю часу. Скорочення непродуктивних витрат часу в кожному такті і зменшення числа тактів для обчислення вихідного сигналу фільтра дозволяє збільшити швидкодію, однак в цьому пристрої реалізоване бути не може. Найбільш близьким до винаходу, по технічній суті є цифровий фільтр з лінійною дельта-модуляцією, що містить модулятор лінійної дельтамодуляції, інформаційний вхід якого є входом фільтра, мультиплексор, перший інформаційний вхід якого об'єднаний з інформаційним входом блока оперативної пам'яті і підключений до виходу модулятора, вихід блока оперативної пам'яті підключений до другого інформаційного входу мультиплексора, блок постійної пам'яті, вихід якого і вихід мультиплексора підключені до першого і другого входів елемента еквівалентності, вихід якого підключений до керуючого входу реверсивного лічильника, виходи якого підключені до інформаційних входів першого накопичуючого суматора, виходи якого з'єднані з інформаційними входами другого накопичуючого суматора, виходи якого підключені до входів цифроаналогового перетворювача, вихід якого і виходи другого накопичуючого суматора є другим і першим виходами фільтру, тактовий генератор, вихід якого з'єднаний з лічильними входами реверсивного і першого двійкових лічильників, першим входом формувача імпульсів і входом дозволу елемента заборони, вихід якого підключений до лічильного входу другого двійкового лічильника, виходи розрядів якого підключені до входів блоку постійної пам'яті і елемента АБО-НЕ, вихід якого підключений до керуючих входів мультиплексора і блока оперативної пам'яті, адресні входи якого об'єднані з входами елемента І і підключені до розрядних виходів першого двійкового лічильника, вихід переповнення якого з'єднаний з тактовим входом модулятора, вихід елемента І підключений до входу заборони елемента ЗАБОРОНИ і другого входу формувача імпульсів, вихід якого з'єднаний з тактовими входами першого і другого накопичуючих суматорів [3]. В цьому фільтрі виключені непродуктивні витрати часу на формування послідовності адрес блоків постійної і оперативної пам'яті - ці послідовності формуються синхронно, що, поряд із застосуванням формату лінійної дельта-модуляції для подання вхідного сигналу і вагової послідовності, дозволило забезпечити достатньо високу швидкодію пристрою. Однак за період дискретизації в відомому фільтрі виконується значне число арифметичних операцій (рівне довжині ваговий послідовності), що не дозволяє отримати більш високу швидкодію. Зазначимо також, що низька розрядність вагової послідовності в форматі лінійної дельтамодуляції - рівна один, перешкоджає збільшенню роздільної здатності фільтрів, відомих з [2, 3]. Застосування вагової послідовності більшої розрядності, наприклад, в форматі багаторівневої дельта-модуляції (БДМ), дозволяє збільшити роздільну здатність, однак призводить до зменшення швидкодії через необхідність виконання операцій множення. В основу винаходу покладено задачу удосконалення цифрового фільтра з лінійною дельтамодуляцією шляхом конструктивної оптимізації, що дозволяє досягти збільшення швидкодії і підвищення роздільної здатності цифрового фільтра з лінійною дельта-модуляцією. Поставлена задача вирішується за рахунок того, що за рахунок введення в відомий пристрій регістра зсуву, першого і другого буферних регістрів, третього і четвертого лічильників і відповідних зв'язків в запропонованому пристрої здійснюється обробка вхідного сигналу в форматі лінійної дельта-модуляції з використанням вагової послідовності в форматі багаторівневої дельта-модуляції, з частотою дискретизації вхідного сигналу, характерною для лінійної дельта-модуляції. Вихідний сигнал цифрового фільтра поданий в форматі імпульсно-кодової модуляції з частотою дискретизації, характерною для цього виду (ІКМ) модуляції. Таким чином, за рахунок такого подання сигналів, забезпеченого введенням вказаних блоків і зв'язків, в одиницю часу в запропонованому фільтрі виконується значно менше, ніж в прототипі, число арифметичних операцій, що істотно збільшує його швидкодію. Крім того, елементарні додавання згруповані в пристрої в групи і виконуються одночасно в кожній групі шляхом табличного перетворення для всієї групи згідно формули цифрової згортки. Це дозволяє різко зменшити число арифметичних операцій, які виконуються згідно формули цифрової згортки (значно менше довжини вагової послідовності), а також замінити їхнє виконання зчитуванням з блоку пам'яті, що також призводить до відповідного збільшення швидкодії. Водночас така заміна дозволяє зняти обмеження на розрядність вагової послідовності і отримати будьяку, наперед задану, роздільну здатність цифрового фільтра шляхом зміни розрядності вагової послідовності (зміни вмісту блоку постійної пам'яті). Додатково зазначимо, що ще одним чинником отримання високої швидкодії запропонованого фільтра є повне виключення непродуктивних витрат часу в кожному такті і забезпечення синхрон 2 36645 ного формування адрес блоків постійної та оперативної пам'яті. Суть винаходу полягає в тому, що цифровий фільтр з лінійною дельта-модуляцією містить тактовий генератор, модулятор лінійної дельта-модуляції, інформаційний вхід якого є входом фільтра, блок мультиплексування, перші інформаційні входи якого підключені до виходів блока, оперативної пам'яті, перший накопичуючий суматор, виходи якого з'єднані з інформаційними входами другого накопичуючого суматора, виходи якого є першими виходами фільтра та з'єднані з входами цифроаналогового перетворювача, вихід якого є другим виходом фільтра, перший лічильник, розрядні виходи якого з'єднані з адресними входами блока оперативної пам'яті, керуючий вхід якого об'єднаний з керуючим входом блока мультиплексування та підключений до виходу елемента АБО-НЕ, входи якого об'єднані з першими адресними входами блоку постійної пам'яті і підключені до розрядних виходів другого лічильника, а також містить регістр зсуву, перший і другий буферні регістри, третій і четвертий лічильники, інформаційний вхід регістра зсуву підключений до виходу модулятора, розрядні виходи регістра зсуву підключені до інформаційних входів першого буферного регістра, виходи якого з'єднані з інформаційними входами блока оперативної пам'яті і другими інформаційними входами блока мультиплексування, виходи якого підключені до других адресних входів блока постійної пам'яті, виходи якого з'єднані з інформаційними входами першого накопичуючого суматора, тактовий вхід якого об'єднаний з лічильними входами першого і другого лічильників і підключений до виходу переповнення четвертого лічильника, лічильний вхід якого об'єднаний з одноіменним входом третього лічильника і підключений до виходу тактового генератора, вихід переповнення третього лічильника з'єднаний з тактовими входами модулятора та регістра зсуву, тактові входи першого та другого буферних регістрів об'єднані з тактовим входом другого накопичуючого суматора, входом дозволу попереднього встановлення першого лічильника і підключені до виходу елемента АБОНЕ, інформаційні входи другого буферного регістра підключені до розрядних виходів першого лічильника, інформаційні входи якого підключені до виходів другого буферного регістра. Існує тісний причинно-наслідковий зв'язок між усією сукупністю суттєвих ознак та зазначеним технічним результатом. Означені блоки, що введені до пристрою, відомі і широко застосовуються. Однак тільки їхнє включення у відомий пристрій дозволяє виявити в ньому нові властивості, а їх функціональний взаємозв'язок сприяє досягненню очікуваного технічного результату. На фіг. 1 показана функціональна схема цифрового фільтра, на фіг. 2 показані часові діаграми роботи фільтра. Цифровий фільтр з лінійної дельтамодуляцією містить (фіг. 1): модулятор 1 лінійної дельта-модуляції (ЛДМ), перший - четвертий лічильники 2-5, тактовий генератор 6, регістр 7 зсуву, перший і другий 8, 9 буферні регістри, блок 10 оперативної пам'яті, блок 11 постійної пам'яті, блок 12 мультиплексування, елемент 13 АБО-НЕ, перший і другий 14, 15 накопичуючі суматори, ци фрданалоговий перетворювач 16. На фіг.1 позначені вхід 17, перший і другий виходи 18, 19 фільтра. На фіг. 2 показані наступні сигнали: а - тактові імпульси з генератора 6; б - імпульси на виході переповнення лічильника 4; в - зміна кроків квантування на виході модулятора 1; г - імпульси на виході переповнення лічильника 5; д - імпульси на виході елемента 13 АБО-НЕ; е - зміна сигналів на виходах блока 12 мультиплексування; ж - стан лічильника 3. В сигналах (фіг. 2 е, ж) умовно показані адреси блоків 10 і 11 пам'яті. Інформаційний вхід модулятора 1 ЛДМ є входом 17 фільтра, вихід модулятора 1 з'єднаний з інформаційним входом регістра 7 зсуву, розрядні виходи якого підключені до інформаційних входів першого буферного регістр 8. Перші інформаційні входи блока 12 мультиплексування підключені до виходів блоку 10 оперативної пам'яті, інформаційні входи якого об'єднані з другими інформаційними входами блоку 12 мультиплексування і підключені до виходів першого буферного регістра 8. Перші входи блоку 11 постійної пам'яті об'єднані з входами елементу 13 АБО-НЕ та підключені до розрядних виходів другого лічильника 3. Другі входи блоку 11 постійної пам'яті підключені до виходів блоку 12 мультиплексування, виходи блоку 11 постійної пам'яті підключені до інформаційних входів першого 14 накопичуючого суматора, виходи якого підключені до інформаційних входів другого 15 накопичуючого суматора, виходи якого є першими 18 виходами фільтру і підключені до входів цифроаналогового перетворювача 16, вихід якого є другим 19 виходом фільтру. Вихід тактового генератора 6 підключений до лічильних входів третього і четвертого лічильників 4 та 5, вихід переповнення останнього підключений до тактового входу першого накопичуючого суматора 14 та лічильних входів першого та другого лічильників 2 та 3. Вихід переповнення третього лічильника 4 підключений до тактових входів модулятора 1 та регістру 7 зсуву. Адресні входи блоку 10 оперативної пам'яті об'єднані з інформаційними входами другого буферного регістру 9 і підключені до розрядних виходів першого лічильника 2, інформаційні входи якого підключені до виходів другого буферного регістру 9. Тактові входипершого і другого буферних регістрів 8, 9 об'єднані з керуючими входами блоку 10 оперативної пам'яті, блоку 12 мультиплексування, тактовим входом другого накопичуючого суматора 15, входом дозволу попереднього встановлення першого лічильника 2 та підключені до виходу елементу 13 АБО-НЕ. Пристрій працює наступним чином. В цифровому фільтрі з лінійною дельта-модуляцією реалізується наступний алгоритм. Відомо [4], що частота дискретизації при лінійT -1 = mT N 1 , де T N 1 - часm >> 1 - коефіцієнт, що залежить ній дельта-модуляції тота Найквіста, від властивостей вхідного сигналу і параметрів дельта-модулятора. При заданій частоті дискретизації Т-1 модулятор ефективно обробляє смугу частот (0, TN-1), що забезпечується відповідним обмеженням спектру сигналу на вході модулятора у вказаних межах за допомогою фільтру нижніх 3 36645 частот. Завдяки цьому водночас відвертається робота модулятора в режимі перенавантаження за крутизною і відсутність нелінійних спотворень в перетвореному сигналі. Таким чином, наявність вказаного обмеження спектру вхідного сигналу дозволяє здійснити децимацію (пониження) частоти дискретизації Т-1 вхідного сигналу в p £ m разів, тобто спектр прорідженого сигналу буде не ширший за вхідний, а належить зазначеній вище смузі частот (0, TN-1), а значить при цьому буде відсутнє накладення спектру. Тому при децимації дельта-модульованих сигналів в p £ m разів, з обмеженням верхньої частоти спектру вхідного сигналу частотою TN 1 , Цей алгоритм реалізується наступним чином. Перед початком фільтрації необхідно провести обнуління накопичуючих суматорів 14, 15 і лічильників 2-5 (кола скидання на фіг.1 не показані). При цьому на аналоговому 19 і цифровому 18 виходах встановлюються нульові значення сигналів. Таке обнуління необхідно також проводити при випадкових збоях, наприклад, по живленню, щоб відвернути накопичування помилок в вихідному сигналі фільтру. В регістри 7, 8 і блок 10 пам'яті при цьому заносяться значення р-розрядних слів, що складаються з послідовності значень (0,1). Генератор 6 генерує неперервну послідовність -1 імпульсів (фіг. 2а) з частотою f = M / pT , де М - довжина вагової послідовності, р - коефіцієнт проріджування, Т-1 - частота дискретизації вхідного сигналу в форматі ЛДМ. Причому переходом, що викликає зміну стану лічильників 2-5, є перехід на їхньому лічильному вході з одиничного стану в нульовий, тобто зміни стану лічильників відбувається по задньому фронту сигналу на їхніх лічильних входах. Приймемо також, що запис значення сигналу з інформаційних входів регістра 9 відбувається по задньому фронту сигналу на його тактовому вході, а запис значення сигналу з інформаційних входів лічильника 2 відбувається по передньому фронту сигналу на його вході дозволу попереднього встановлення. Імпульси (фіг. 2а) надходять на лічильний вхід лічильника 4 з коефіцієнтом ділення М/р (M=0 mod(p)) на виході переповнення якого формується послідовність імпульсів (фіг. 2б) з частотою Т-1 . За кожним імпульсом (фіг. 2б), що надходить на тактовий вхід модулятора 1, на його виході фіксується значення кроку квантування вхідного сигналу (зі спектром, обмеженим верхньою частотою TN-1) немає необхідності в про веденні попередньої низькочастотної фільтрації дельта-модульованих сигналів, що звичайно застосовується перед децимацією сигналів з імпульсно-кодовою модуляцією [5]. Зменшення частоти дискретизації дозволяє при тій же елементній базі підвищити роздільну здатність фільтру, завдяки можливості реалізації більш складних алгоритмів фільтрації, наприклад, шляхом збільшення довжини і розрядності [6] вагової послідовності, або збільшити швидкодію фільтрів шляхом різкого зменшення числа операцій, що виконуються в фільтрі за одиницю часу. Причому, зменшення частоти дискретизації дозволяє також різко знизити вимоги по швидкодії до апаратури подальшої обробки вихідного сигналу цифрового фільтру і завдяки цьому збільшити її пропускну здатність. Вихідний сигнал цифрового фільтру з лінійної дельта-модуляцією, вхідний сигнал якого поданий в форматі лінійної дельта-модуляції (ЛДМ), а вагова послідовність - в форматі багаторівневої дельта-модуляції (БДМ) з частотою дискретизації Т-1 , причому вихідний сигнал поданий в форматі імпульсно-кодової модуляції (ІКМ) з більш низкою час Ti тотою дискретизації -1 =T -1 / p ³T -1 N , (фіг.2в) в n-му періоді дискретизації ( ( ( ( Bn x ) = (1 + e nx ) ) 2 , B n x ) Î {0,1} , en x ) Î {- 1,1} , на під що зберігається на виході блоку 1 до надходження наступного імпульсу (фіг. 2б) з виходу переповнення лічильника 4. Послідовність кроків кванту ставі [7, 8] записується в вигляді: n i M -1 ( x) ( y n = å å å ekp -m s mh ) де {e }, r>0 (x) r m = 0, M - 1 (1), i = 0 k =1 m = 0 - вхідна ЛДМ, вагова БДМ, {y n }, n>0 вання вхідного сигналу {s }, (h ) m -вихідна i M -1 Ñy i = å å e s , -1 пульсів (фіг. 2г) з частотою T × M / p , тобто з частотою, при якій за період Ті=рТ на виході переповнення лічильника 5 формується М/р імпульсів. Імпульси (фіг. 2г) надходять на входи лічильників 2 і 3, які мають коефіцієнт ділення М/ р. Сигнали з розрядних виходів лічильника 3 надходять на входи елементу 13 АБО-НЕ, що виділяє нульовий стан лічильника 3. По передньому i де Ñy i = å Ñ 2 y k Ñ 2 yk = k =1 M -1 åe , ( x) (h) kp - m m s ( x) i - p +1 подаються на інформаційні входи першого 8 буферного регістру з розрядністю р . Послідовність імпульсів (фіг.2а) з генератора 6 надходить також на лічильний вхід лічильника 5, що має коефіцієнт ділення р. На виході переповнення лічильника 5 формується послідовність ім k =1 m =0 або {B }, i = 1, p . Ці значення в вигляді p-розрядного коду (2) ( x) ( h) kp - m m n>0 надходить на довних значень, кроків квантування n i=0 ( Bn x ) , інформаційний вхід регістру 7 зсуву, в результаті чого в n -му періоді дискретизації на розрядних виходах блоку 7 формується значення із р послі ІКМ послідовності, p £ m - коефіцієнт проріджування. Поділивши згортку (1) на дві послідовні суми, отримаємо алгоритм, що реалізується в фільтрі: y n = å Ñy i ; ( Bn x ) , . m=0 4 2 36645 фронту сигналу (фіг. 2д) з виходу елементу 13 АБО-НЕ в регістрі 8 фіксується р-розрядне слово, сформоване з р послідовних значень кроків квантування вхідного сигналу. Водночас, по цьому ж фронту сигналу (фіг. 2д) в лічильник 2 записується значення вихідного сигналу другого буферного регістра 9, а по задньому фронту сигналу (фіг.2д) значення сигналу з розрядних виходів лічильника 2 записується в регістр 9, що забезпечує циркуляція адрес блоків 10 і 11 пам'яті - в кожному наступному інтервалі часу рТ-1 адреси блоку 10 пам'яті зміщуються на одиницю в сторону випередження відносно адрес блоку пам'яті 11. Сигнал (фіг. 2д) є керуючим для блоку 10 оперативної пам'яті і блоку 12 мультиплексування при високому рівні цього сигналу блок 10 переключається в режим запису, а блок 12 - в положення, при якому сигнал з виходів регістру 8 надходить на другі входи блоку 11 пам'яті. Завдяки рециркуляції адрес блоку 10 пам'яті відносно сигналу на розрядних виходах лічильника 3 запис значення з виходів регістру 8 в блок 10 пам'яті відбувається за адресою j = k mod(M/ р). При низькому рівні сигналу (фіг. 2д) блок 10 переключається в режим зчитування і сигнал з його виходів через блок 12 мультиплексування надходить на другі входи блоку 11 пам'яті. Тому за період часу Ті = рТ на другі входи блоку 11 надходить послідовність з М/р р -розрядних слів, утворених кроками квантування вхідного сигналу {B ( x) n ( x) (x , Bn-1 ,..., Bn-)p +1 }, = n kp, k > 0 . налу на розрядних виходах лічильника 3 наступним чином: w=(M/p-q)mod(M/ p), q = 0, M / p - 1 . Сигнал з виходів блоку 11 надходить на інформаційні входи першого суматора 14, тому в кінці k-го інтервалу часу накопичення рТ на виходах блоку 14 формується значення внутрішньої суми (2) в n = kр-ому періоді дискретизації: r + w = k - (М / p - q) mod(M / p)+ (M / p-q) mod(M / p)=k. Вказане співвідношення між індексами послідовностей Ñ 2 y k +1 , s суматора 14 буде рівний чення блоку 11 за значеннями кам квантування s вхідного Позначи ( p) dy k - q ( p) dy k - q {e }, (x) rp - m зчитується з блоку 11 пам'яті за значен нями відповідних кроків квантування sk(x), що надходять на другі входи блоку 11 пам'яті. Запис значень ( p) dy k - q здійснюється підряд, починаючи з ну льової адреси блоку 11 за зростаючими адресами, причому w-a w Î {0, M / p - 1} група значень Ñy k згідно (2). Накопичування значень для обчислення першої різниці (2). В прото типі і аналогічних пристроях за період Т виконується М аналогічних операцій, що показує високу ефективність запропонованого пристрою - число арифметичних операцій в одиницю часу зменшене в р2 разів. Враховуючи, що здійснюється підсумовування табличних значень, які обчислені заздалегідь і зберігаються в блоці 11 постійної пам'яті, витрати часуна виконання підсумовування в прототипі і заявленому пристрої можна прийняти рівними. Це дозволяє зробити висновок, що даний пристрій має в р2 раз більш високу швидкодію, або, що еквівалентно , дозволяє обробляти вхідні сигнали з більш широкою, в р2 раз, смугою при заданій частоті дискретизації Т-1 і відповідному обмеженні спектру вхідного сигналу. які відповідають кро m = qp, p( q + 1) - 1 . Для цього адресне поле (перші входи) блоку 11 пам'яті розділене на М / р груп, що адресуються значеннями сигналу на розрядних виходах лічильника 3, а конкретне значення Таким чином, в перетворюється цифроаналоговим перетворювачем 16 в аналогову форму y(t) і подається відповідно на перші і другій виходи 18 і 19 фільтру. При фільтрації періодичних сигналів вихідний сигнал фільтру, а також перша різниця (2) є періодичними функціями часу і відсутність переповнення суматора 14 забезпечується вибором його розрядності з умови максимального значення амплітуди першої різниці. Тому за час Ті= рТ (період поступлення вихідних відліків фільтру в ІКМ-форматі), в запропонованому пристрої виконується М / р арифметичних операцій підсумовування табличних значень , сигналу Ñy k . {Ñyk } в суматорі 15 дає згідно (1) значення вихідного сигналу фільтру {y k } в форматі ІКМ, що де q = 0, M / p - 1 - значення сигналу на розрядних виходах лічильника 3, що зчитуються з ( x) k , тому після k періодів рТ, враховуючи суматорі 14 об'єднані функції двох послідовних накопичуючих суматорів, тобто формування зна mod(M / р), q = 0, M / p - 1 , тобто послідовність значень {sr(x) },r =k- (M / p - 1) mod(M / p), де q - сигнал на розрядних виходах лічильника 3. В блоці 11 пам'яті записані часткові суми: åe ( p) k -q нульове початкове значення, сигнал на виходах мо це слово через sk . Тоді за час рТ на другі входи блоку 11 пам'яті надходить М/р значень sk(x) записаних в блоці пам'яті 10 за адресами j = (q + k) p ( q +1) -1 ( x) ( h) kp - m m m = pq (x) k сами блоків 10 та 11 пам'яті проілюстроване на фіг.2 для випадку k mod(M / р) = 0. В кінці біжучого періоду рТ за імпульсом з виходу елементу 13 АБО-НЕ (фіг. 2д) накопичене в суматорі 14 значення записується в суматор 15, де підсумовується з його попереднім значенням. В наступному, k + 1 -му періоді рТ значення сигналу на виходах блоку 14 зміниться на величину (x) p dy k( - )q = {s } і {dy } за відповідними адре {dy }, ( p) k-w Підсумовування табличних значень {dy } ( p) k -q дозволяє вибрати будь-яку, що задовольняє задану, роздільну здатність фільтру розрядність вагових коефіцієнтів [6]. Причому зміна розрядності вагової послідовності не змінює швидкодії фільт адресується значенням сиг 5 36645 ра, а призводить тільки до зміни вмісту блоку 11 постійної пам'яті, який може бути легко виконаний на ПЗП. Наприклад, при довжині вагової послідовності М=256 і коефіцієнті р=8 необхідний коефіцієнт ділення лічильника 3 рівний М/р= 256/8= 32, що забезпечується п'ятирозрядним лічильником. Необхідне число входів блоку 11 пам'яті в цьому випадку рівно r = р + log2(M / р) = 13 і реалізується однією мікросхемою типу 556РТ16 з обсягом пам'яті Q=213 комірок. Зазначимо, що для наведеного прикладу швидкодія цифрового фільтру з лінійною дельтамодуляцією вища, ніж у прототипу, в р2 =64 разів при одночасному збільшенні роздільної здатності шляхом вибору відповідної розрядности вагової послідовності. Довжина ваговоїпослідовності М = 256 в форматі БДМ дозволяє отримати високу якість обробки практичних будь-якого складного вхідного сигналу. Таким чином, застосуванні у відомому пристрої лічильників 4, 5 і регістрів 7-9 з відповідними зв'язками дозволило збільшити швидкодію і підвищити роздільну здатність цифрового фільтра з лінійною дельта-модуляцією. Інші блоки можуть бути виконані аналогічно прототипу. Джерела інформації. 1. Рабинер Л. Гоулд В. Теория и применение цифровой обработки сигналов / Пер. с англ. Под ред. Ю.Н. Александрова. - М.: Мир. - 1978. – 848 с. 2. 2.А.С. № 1424119 СССР, МКИ НОЗН17/06, НОЗМ:3/02. Цифровой фильтр с линейной дельтамодуляцией / Тимченко А.В. (СССР). № 4140738/24-24; Заявл. 29.10.86. Опубл. 15.09.88, Бюл. № 34. – 6 с. 3. 3.А.С. №1425841 СССР, МКИ НОЗМЗ/02, НОЗН17/06. Цифровой фильтр с линейной дельта-модуляцией / Тимченко А.В. (СССР). № 4219944/24-24; Заявл. 31.03.87. Опубл. 23.09.88, Бюл. № 35. – 6 с. 4. Волкомирская Л.Б., Погрибной В. А., Резников А.В., Тимченко А.В. Методы цифровой фильтрации геофизических сигналов / Препринт № 49(659). - М.: ИЗМИРАН, 1986. – 35 с. 5. Р.В. Крошьер. Л.Р.Рабинер. Интерполяция и децимация цифровых сигналов: Методический обзор // ТИИЭР. - 1981. - Т. 69. - № 3 - С. 14-49. 6. Погрибной В.А., Тимченко А.В. Расчет цифровых фильтров с дельта-модуляцией // Радиоэлектроника. - 1988. - Т31. - № 3. - С. 15-21. (Изв. высш. учебн. заведений). 7. Погрибной В.А. Бортовые системы обработки сигналов. - Киев: Наук. думка, 1984. – 216 с. -С. 88-89. 8. 8. Тимченко А.В. Новые методы цифровой фильтрации дельта-модулированных сигналов // Радиоэлектроника. — 1998. — Т. 41. - № 9. — С. 41-48. (Изв. высш. учебн. заведений). Фіг. 1 6 36645 Фіг. 2 __________________________________________________________ ДП "Український інститут промислової власності" (Укрпатент) Україна, 01133, Київ-133, бульв. Лесі Українки, 26 (044) 295-81-42, 295-61-97 __________________________________________________________ Підписано до друку ________ 2001 р. Формат 60х84 1/8. Обсяг ______ обл.-вид. арк. Тираж 50 прим. Зам._______ ____________________________________________________________ УкрІНТЕІ, 03680, Київ-39 МСП, вул. Горького, 180. (044) 268-25-22 ___________________________________________________________ 7
ДивитисяДодаткова інформація
Назва патенту англійськоюDigital filter with linear delta modulation
Автори англійськоюVoitovych Anatolii Mykhailovych, Nykyforuk Bohdan Vasyliovych, Tymchenko Oleksandr Volodymyrovych
Назва патенту російськоюЦифровой фильтр с линейной дельта-модуляцией
Автори російськоюВойтович Анатолий Михайлович, Никифорук Богдан Васильевич, Тимченко Александр Владимирович
МПК / Мітки
МПК: H03H 17/06, H03M 3/02
Мітки: дельта-модуляцією, лінійною, цифровий, фільтр
Код посилання
<a href="https://ua.patents.su/7-36645-cifrovijj-filtr-z-linijjnoyu-delta-modulyaciehyu.html" target="_blank" rel="follow" title="База патентів України">Цифровий фільтр з лінійною дельта-модуляцією</a>
Цифровий фільтр з лінійною d-модуляцією
Номер патенту: 36645
Опубліковано: 16.04.2001
Автори: Дурняк Богдан Васильович, Никифорук Богдан Васильович, Тимченко Олександр Володимирович, Войтович Анатолій Михайлович, Гудима Олег Ярославович
МПК: H03H 17/06, H03M 3/02
Мітки: фільтр, d-модуляцією, лінійною, цифровий
Формула / Реферат:
Цифровий фільтр з лінійною дельта-модуляцією, що містить тактовий генератор, модулятор лінійної дельта-модуляції, інформаційний вхід якого є входом фільтра, блок мультиплексування, перші інформаційні входи якого підключені до виходів блока оперативної пам'яті, перший нагромаджуючий суматор, виходи якого з'єднані з інформаційними входами другого нагромаджуючого суматора, виходи якого є першими виходами фільтра і з'єднані з входами...
Цифровий фільтр

Номер патенту: 56081
Опубліковано: 15.04.2003
Автори: Тимченко Олександр Володимирович, Стрепко Ігор Теодорович, Дурняк Богдан Васильович, Горбатий Іван Володимирович, Никифорук Богдан Васильович
МПК: H03H 15/00, H03M 3/02
Формула / Реферат:
Цифровий фільтр, що містить послідовно включені перший і другий нагромаджуючі суматори, причому вихід останнього є виходом фільтра, перший обчислювальний блок, що містить першу лінію затримки на М/р зсувів, де М - довжина вагової послідовності цифрового фільтра, виходи якої з'єднані з першими входами перетворювача коду, інформаційні, тактовий та вхід скидання першої лінії затримки є відповідно інформаційним, першим тактовим входом і входом...
Цифровий фільтр

Номер патенту: 56080
Опубліковано: 15.04.2003
Автори: Тимченко Олександр Володимирович, Горбатий Іван Володимирович, Никифорук Богдан Васильович, Дурняк Богдан Васильович, Стрепко Ігор Теодорович
МПК: H03H 15/00, H03M 3/02
Формула / Реферат:
Цифровий фільтр, що містить послідовно включені перший і другий нагромаджуючі суматори, причому вихід останнього є виходом фільтра, перший обчислювальний блок, що містить першу лінію затримки на М/р зсувів, де М - довжина вагової послідовності цифрового фільтра, виходи якої з'єднані з першими входами перетворювача коду, інформаційні, тактовий та вхід скидання першої лінії затримки є відповідно першим інформаційним, першим тактовим і входом...
Цифровий трансверсальний фільтр
Номер патенту: 52137
Опубліковано: 16.12.2002
Автори: Дурняк Богдан Васильович, Тимченко Олександр Володимирович, Никифорук Богдан Васильович, Стрепко Ігор Теодорович
МПК: H03H 15/00, H03M 3/02
Мітки: фільтр, цифровий, трансверсальний
Формула / Реферат:
Цифровий трансверсальний фільтр, що містить послідовно включені перший і другий нагромаджуючі суматори, вихід останнього є виходом фільтра, перший обчислювальний блок, що містить першу лінію затримки на М/р зсувів, де Μ - довжина вагової послідовності цифрового трансверсального фільтра, виходи якої з'єднані з входами перетворювача коду, інформаційний, тактовий і вхід скидання першої лінії затримки є відповідно інформаційним,...
Адаптивний цифровий фільтр
Номер патенту: 28990
Опубліковано: 16.10.2000
Автори: Іщенко Володимир Іванович, Зімчук Ігор Валерійович
МПК: G05B 17/00
Мітки: цифровий, фільтр, адаптивний
Формула / Реферат:
Адаптивний цифровий фільтр, що містить послідовно з'єднані блок порівняння, перший вхід котрого є входом пристрою, блок корекції, суматор, блок затримки, блок екстраполяції, вихід якого об'єднай з другим входом суматора, крім того уміщуючий блок зворотного зв'язку, підключеного входом до виходу блока екстраполяції, а виходом до другого входу блока порівняння, який відрізняється тим, що в нього введені перше та друге обчислювальні пристрої,...
Попередній патент: Фунгіцидні суміші
Наступний патент: Пристрій для захищеного від маніпуляцій прийому амплітудно-модульованого сигналу
Випадковий патент: Пристрій з комбінованими камерою та поршнем (варіанти)