Спосіб автоматичного контролю дефектів тросової основи рухомої стрічки конвеєра
Номер патенту: 39843
Опубліковано: 10.03.2009
Автори: Краснік Вячеслав Григорович, Левін Євген Олександрович, Довженко Володимир Профирович, Новиков Євген Петрович, Одарюк Олександр Іванович, Головань Сергій Олексійович, Бережинський Володимир Ізраілевич
Формула / Реферат
1. Спосіб автоматичного контролю дефектів тросової основи рухомої стрічки конвеєра, що полягає в тому, що проводять подовжнє намагнічування тросів стрічки, умовно розбивають поверхню стрічки по ширині на ![]() смуг (каналів контролю) уздовж всієї довжини стрічки, реєструють по кожному каналу контролю магнітні поля розсіювання в зонах локальних пошкоджень тросової основи та на межах стикових з'єднань (технологічних пошкоджень тросів стрічки), на їх основі формують, потім перетворюють і контролюють електричні інформаційні сигнали по кожному з каналів контролю і по всій ширині стрічки, здійснюють селекцію інформаційних сигналів за формою для розпізнавання стикових з'єднань і локальних пошкоджень тросової основи стрічки, формують і реєструють еталонне значення калібрувально-еталонного сигналу (сигналу від еталона), порівнюють отриману інформацію про дефект з його гранично допустимим значенням, результат порівняння реєструють, зберігають в пам'яті і використовують для оцінки стану тросової основи в зоні дефекту і прийняття рішення про відключення приводу конвеєра, який відрізняється тим, що як еталонний сигнал (критерій) використовують розрахункову середньостатистичну величину амплітудних значень інформаційних сигналів, сформованих на межах стикових з'єднань, для чого їх вимірюють, реєструють і зберігають в пам'яті, а шукану величину критерію
смуг (каналів контролю) уздовж всієї довжини стрічки, реєструють по кожному каналу контролю магнітні поля розсіювання в зонах локальних пошкоджень тросової основи та на межах стикових з'єднань (технологічних пошкоджень тросів стрічки), на їх основі формують, потім перетворюють і контролюють електричні інформаційні сигнали по кожному з каналів контролю і по всій ширині стрічки, здійснюють селекцію інформаційних сигналів за формою для розпізнавання стикових з'єднань і локальних пошкоджень тросової основи стрічки, формують і реєструють еталонне значення калібрувально-еталонного сигналу (сигналу від еталона), порівнюють отриману інформацію про дефект з його гранично допустимим значенням, результат порівняння реєструють, зберігають в пам'яті і використовують для оцінки стану тросової основи в зоні дефекту і прийняття рішення про відключення приводу конвеєра, який відрізняється тим, що як еталонний сигнал (критерій) використовують розрахункову середньостатистичну величину амплітудних значень інформаційних сигналів, сформованих на межах стикових з'єднань, для чого їх вимірюють, реєструють і зберігають в пам'яті, а шукану величину критерію ![]() визначають згідно з формулою
визначають згідно з формулою
 , (1)
, (1)
де ![]() - модулі амплітудних значень позитивної і негативної фаз інформаційного сигналу, сформованого в поперечному перерізі на межах j-го стикового з'єднання стрічки, мВ;
- модулі амплітудних значень позитивної і негативної фаз інформаційного сигналу, сформованого в поперечному перерізі на межах j-го стикового з'єднання стрічки, мВ;
![]() - кількість стикових з'єднань в стрічці, од.;
- кількість стикових з'єднань в стрічці, од.;
вимірюють також амплітудні значення негативної ![]() і позитивної
і позитивної ![]() фаз інформаційного сигналу, сформованого в зоні і-го пошкодження тросової основи стрічки, при цьому їх модулі і розрахункове значення еталонного сигналу (критерію) реєструють, зберігають в пам'яті і використовують для визначення еквівалентного числа обірваних тросів
фаз інформаційного сигналу, сформованого в зоні і-го пошкодження тросової основи стрічки, при цьому їх модулі і розрахункове значення еталонного сигналу (критерію) реєструють, зберігають в пам'яті і використовують для визначення еквівалентного числа обірваних тросів ![]() в поперечному перерізі стрічки в зоні і-го пошкодження тросової основи згідно з алгоритмом
в поперечному перерізі стрічки в зоні і-го пошкодження тросової основи згідно з алгоритмом
![]() , (2)
, (2)
де ![]() - поправочний коефіцієнт, що враховує умови формування інформаційних сигналів в зонах пошкоджень тросової основи і на межах стикових з'єднань (визначений експериментальним шляхом,
- поправочний коефіцієнт, що враховує умови формування інформаційних сигналів в зонах пошкоджень тросової основи і на межах стикових з'єднань (визначений експериментальним шляхом, ![]() );
);
![]() - кількість тросів в стрічці конвеєра, од.;
- кількість тросів в стрічці конвеєра, од.;
![]() - кількість ступенів в стиковому з'єднанні стрічки, од.;
- кількість ступенів в стиковому з'єднанні стрічки, од.;
причому розрахункове значення параметра реєструють, зберігають в пам'яті і використовують як порівнювальну величину.
2. Спосіб за п. 1, який відрізняється тим, що при оцінці стану тросової основи в межах ширини кожною з ![]() каналів контролю, як еталонний сигнал (критерій) використовують розрахункову середньостатистичну величину амплітудних значень інформаційних сигналів, сформованих на межах стикових з'єднань стрічки відповідного, наприклад,
каналів контролю, як еталонний сигнал (критерій) використовують розрахункову середньостатистичну величину амплітудних значень інформаційних сигналів, сформованих на межах стикових з'єднань стрічки відповідного, наприклад, ![]() -го каналу контролю
-го каналу контролю ![]() , для чого їх вимірюють, реєструють і зберігають в пам'яті, а шукану величину критерію
, для чого їх вимірюють, реєструють і зберігають в пам'яті, а шукану величину критерію ![]() визначають згідно з формулою
визначають згідно з формулою
 , (3)
, (3)
де ![]() - модулі амплітудних значень позитивної і негативної фаз інформаційного сигналу, сформованого на межах j-го стикового з'єднання в межах ширини m-го каналу контролю, мВ;
- модулі амплітудних значень позитивної і негативної фаз інформаційного сигналу, сформованого на межах j-го стикового з'єднання в межах ширини m-го каналу контролю, мВ;
вимірюють також амплітудні значення негативної ![]() і позитивної
і позитивної ![]() фаз інформаційного сигналу, сформованого в зоні і-го пошкодження тросової основи в межах ширини m-го каналу контролю, при цьому їх модулі і розрахункове значення критерію реєструють, зберігають в пам'яті і використовують для визначення еквівалентного числа обірваних тросів
фаз інформаційного сигналу, сформованого в зоні і-го пошкодження тросової основи в межах ширини m-го каналу контролю, при цьому їх модулі і розрахункове значення критерію реєструють, зберігають в пам'яті і використовують для визначення еквівалентного числа обірваних тросів ![]() в зоні і-го пошкодження тросової основи в межах ширини m-го каналу контролю стрічки згідно з алгоритмом
в зоні і-го пошкодження тросової основи в межах ширини m-го каналу контролю стрічки згідно з алгоритмом
 , (4)
, (4)
а еквівалентне число обірваних тросів в поперечному перерізі стрічки визначають згідно з формулою
 (5).
(5).
3. Спосіб за пп. 1, 2, який відрізняється тим, що як розрахункову величину при визначенні еталонного значення сигналу і числа обірваних тросів в поперечному перерізі стрічки і кожного каналу контролю використовують амплітудне значення однієї з фаз інформаційного сигналу.
Текст
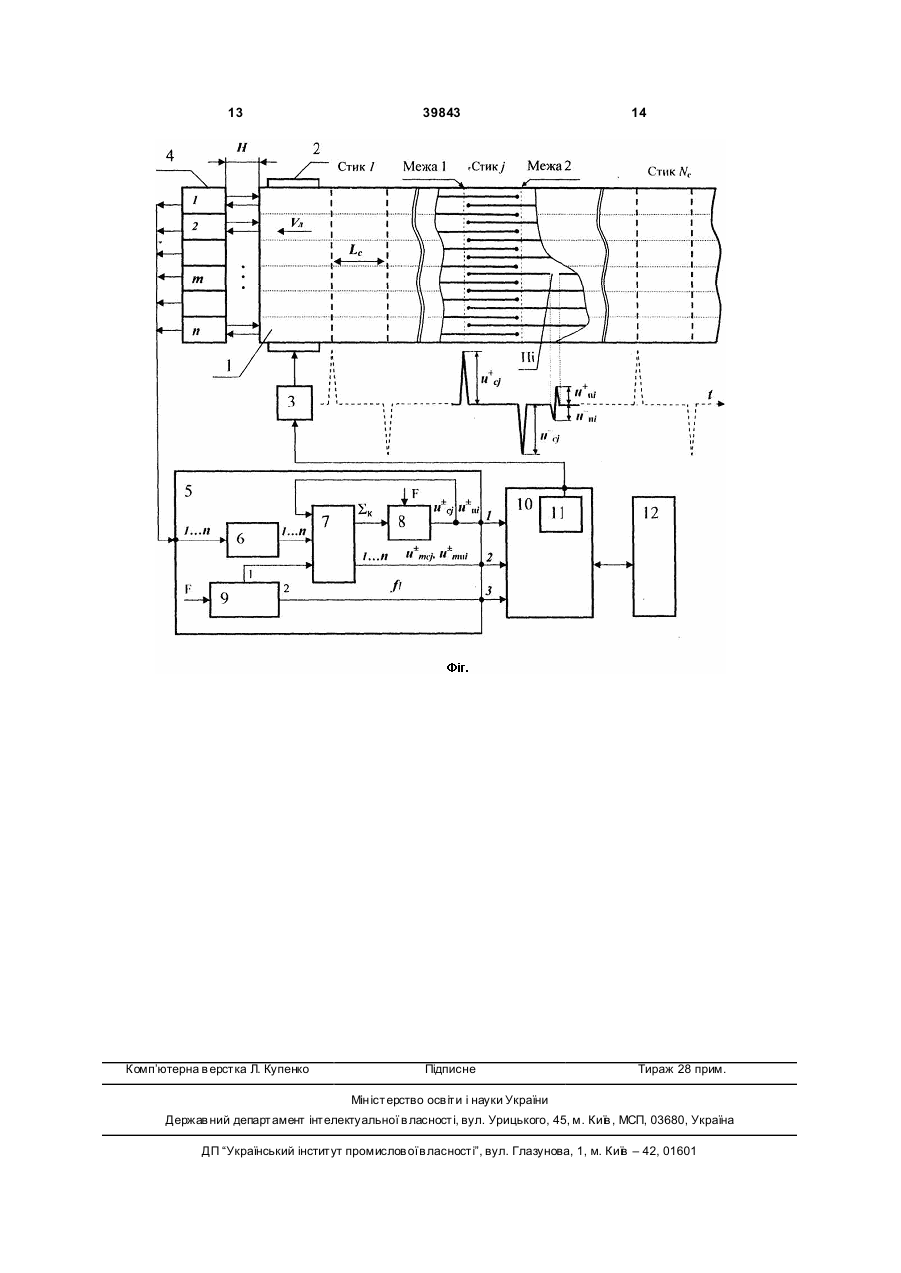
UA 1. Спосіб автоматичного контролю дефектів тросової основи рухомої стрічки конвеєра, що полягає в тому, що проводять подовжнє намагнічування тросів стрічки, умовно розбивають поверхню стрічки по ширині на n смуг (каналів контролю) уздовж всієї довжини стрічки, реєструють по кожному каналу контролю магнітні поля розсіювання в зонах локальних пошкоджень тросової основи та на межах стикових з'єднань (технологічних пошкоджень тросів стрічки), на їх основі формують, потім перетворюють і контролюють електричні інформаційні сигнали по кожному з каналів контролю і по всій ширині стрічки, здійснюють селекцію інформаційних сигналів за формою для розпізнавання стикових з'єднань і локальних пошкоджень тросової основи стрічки, формують і реєструють еталонне значення калібрувально-еталонного сигналу (сигналу від еталона), порівнюють отриману інформацію про дефект з його гранично допустимим значенням, результат порівняння реєструють, зберігають в пам'яті і використовують для оцінки стану тросової основи в зоні дефекту і прийняття рішення про відключення приводу конвеєра, який відрізняється тим, що як еталонний сигнал (критерій) використовують розрахункову середньостатистичну величину амплітудних значень інформаційних сигналів, сформованих на межах стикових з'єднань, для чого їх вимірюють, реєструють і зберігають в 3 39843 кану величину критерію U ± визначають згідно з mc формулою Nc å (u j=1 U± = mc + mcj + umcj 2 ×N c ) , (3) + де umcj , umcj - модулі амплітудних значень позитивної і негативної фаз інформаційного сигналу, сформованого на межах j-го стикового з'єднання в межах ширини m-го каналу контролю, мВ; вимірюють також амплітудні значення негативної + umпі і позитивної umпі фаз інформаційного сигналу, сформованого в зоні і-го пошкодження тросової основи в межах ширини m-го каналу контролю, при цьому їх модулі і розрахункове значення критерію реєструють, зберігають в пам'яті і використовують для визначення еквівалентного числа Спосіб відноситься до неруйнівного контролю рухомих протяжних виробів, армованих металевими тросами, і може бути використаний для контролю локальних пошкоджень тросової основи гумотросових стрічок конвеєрів, що експлуатуються у вугільній, гірничодобувній і інших галузях промисловості. Відомі способи неруйнівного контролю стану гумотросових стрічок (ГТС), засновані на використанні проникаючих випромінювань, зокрема рентгено- і гамма-дефектоскопії [Полунин В. Т., Гуленко Г. Н.. Эксплуатация мощных конвейеров. - М.: Недра, 1986. - 344 с, с.104-108]. Виявлення дефектів тросової основи в стрічці здійснюється візуально оператором по зображенню тросів на дисплеї або на фотоплівці. Така дефектоскопія трудомістка в обслуговуванні і витратна, у зв'язку з чим використовується для контролю тросової основи тільки стикових з'єднань або окремих ділянок стрічки при зупиненому конвеєрі. Крім того, відомі способи контролю вимагають вживання спеціальних заходів безпеки в процесі експлуатації. Відомий також спосіб з використанням магнітоферозондової дефектоскопії, який реалізований в пристрої контролю цілісності тросів типу УКЦТ [Панин А. В., Ба шков М. И., Бродский Л. В. и др. Датчики для автоматизации угольных шахт. - К: Техніка, 1975. - 96 с, с.69-72]. Суть цього способу контролю зводиться до подовжнього намагнічування тросової основи рухомої ГТС конвеєра, реєстрації магнітних полів розсіювання в місцях дефектів тросової основи за допомогою багатоканального ферозондового первинного перетворювача і формування на цій основі електричних інформаційних сигналі в, що характеризують ступінь втрати тросів в поперечному перерізі всієї стрічки, і порівнянню вказаних інформаційних сигналів з еталонним значенням, по результату якого судять про стан тросової основи стрічки. Основними недоліками цього способу є складність апаратурної реалізації (пристрій повинен мати автономний прилад для намагнічування, ма 4 обірваних тросів N mпі в зоні і-го пошкодження тросової основи в межах ширини m-го каналу контролю стрічки згідно з алгоритмом ( ) NT u - + u+ mпі × mпі , (4) n ×к 2 ×U ± mc а еквівалентне число обірваних тросів в поперечному перерізі стрічки визначають згідно з формулою N mпі= кэ × n N пі= åN mпі (5). m= 1 3. Спосіб за пп. 1, 2, який відрізняється тим, що як розрахункову величину при визначенні еталонного значення сигналу і числа обірваних тросів в поперечному перерізі стрічки і кожного каналу контролю використовують амплітудне значення однієї з фаз інформаційного сигналу. гнітомодуляційні елементи і вузли виділення другої гармоніки, вузли компенсації магнітного поля Землі та ін.), а також можливість його використання тільки для профілактичного контролю. Найбільш близьким по технічній суті до заявленого є спосіб автоматичного контролю стану тросової основи рухомої конвеєрної стрічки і пристрій для його здійснення [SU, a.c. №1632174, G01 N 27/80, заявлене 1989р., опубліковане Бюл. №8, 1991р.] - прототип. Прототип реалізує магнітоіндукційний метод контролю з використанням багатоканального первинного перетворювача і передбачає установку на футерівці по краю приводного барабана еталона, виготовленого з стрічки, що експлуатується, у вигляді зразка невеликих розмірів з кількістю тросів, яка дорівнює гранично допустимій кількості обірваних тросів для даної стрічки. Суть відомого способу полягає в подовжньому намагнічуванні тросів стрічки, в умовному розбитті поверхні стрічки на рівні за площею ділянки з фіксованою шириною і довжиною, при цьому ширина ділянки стрічки відповідає ширині каналу контролю, реєстрації магнітних полів розсіювання в місцях пошкодження тросів, включаючи технологічні дефекти на межах стикових з'єднань, формуванні, перетворюванні і контролі інформаційних електричних сигналів про локальні пошкодження тросової основи в поперечному перерізі стрічки по кожному з n каналів контролю і по всій ширині стрічки, селекції вказаних сигналів за формою і величиною, у формуванні еталонного значення сигналу в n + 1 каналі контролю, порівнянні амплітудних значень інформаційних сигналів в зоні пошкоджень тросової основи з інформаційним сигналом від еталону, реєстрації і формалізації результатів порівняння у вигляді логічних «1» і «0», при цьому стан стрічки оцінюють за формалізованою інформацією про пошкодження тросової основи за наявності логічної «1» в двох і більше каналах контролю в одному поперечному перерізі стрічки, на підставі чого приймається рішення про відключення привода кон 5 39843 веєра. Основними недоліками прототипу є низька точність, надійність і ефективність контролю. Вказані недоліки обумовлені невідповідністю параметрів інформаційних сигналів від калібрувальноеталоного зразка (еталону), що закріплюється на футерівці приводного барабана, параметрам сигналів фізичної моделі реального пошкодження тросової основи, яка в процесі експлуатації стрічки посилюється, а також недосконалістю рівня обробки інформаційних сигналів. Так, інформаційні сигнали від еталону і еквівалентного реального пошкодження тросової основи відрізняються по величині в 1,2-1,35 рази залежно від товщини футерівки, магнітних властивостей металу і величини вібрацій барабана конвеєра, а також від геометрії вимірювання. Крім того, магнітні властивості тросів стрічки змінюються в процесі її експлуатації через механічні розтяжні, згинальні та ударні навантаження на роликах, барабанах і в зоні завантаження матеріалу, в той же час троси еталона такого впливу не зазнають. До інших недоліків прототипу слід віднести складність і трудомісткість виготовлення і установки еталону на об'єкті контролю, обмежений вибір зони відбору інформації, пов'язаний з необхідністю установки еталону тільки на футерованих барабанах конвеєра, а також ускладнення конструкції первинного перетворювача і електронного блока, які повинні мати додатково вимірювальноперетворюючий елемент для (n + 1) каналу контролю інформаційного сигналу від еталону і комутуючий елемент відповідно. Обробка формалізованої інформації в прототипі забезпечує лише контроль аварійно небезпечних пошкоджень тросової основи встановленої величини (видається інформація про такі пошкодження типу «так»-«ні», «1»-«0»), а визначення і реєстрація всього спектра пошкоджень тросової основи не проводиться через складність реалізації. Таким чином, втрачається істотний об'єм інформації про пошкодження тросової основи, які не досягли аварійно небезпечного рівня. В основу корисної моделі поставлено завдання підвищення точності, надійності і ефективності автоматичного контролю всього спектра дефектів тросової основи рухомої стрічки конвеєра. Поставлене завдання досягається за рахунок використання більш достовірних і більш надійних критеріїв еталонних значень калібрувальноеталонних сигналів і на їх основі більш ефективних алгоритмів для визначення величини дефектів тросової основи в поперечному перерізі по всій ширині стрічки конвеєра і по ширині окремих її каналів контролю. Згідно з винаходом, як еталонний сигнал (критерію) використовують розрахункову середньостатистичну величину амплітудних значень інформаційних сигналів, сформованих на межах стикових з'єднань, для чого їх вимірюють, реєструють і збе± рігають в пам'яті, а шукану величину критерію U c визначають згідно з формулою 6 Nc å æ u+ + u- ö ç cj cj ÷ è ø ± j=1 U c= , 2 ×N c (1) + де ucj , u- - модулі амплітудних значень позиcj тивної і негативної фаз інформаційного сигналу, сформованого в поперечному перерізі на межах jго стикового з'єднання стрічки, мВ; N c - кількість стикових з'єднань в стрічці, од.; вимірюють також амплітудні значення негати+ вної uпі і позитивної uпі фаз інформаційного сигналу, сформованого в зоні і-го пошкодження тросової основи стрічки, при цьому їх модулі і розрахункове значення еталонного сигналу (критерію) реєструють, зберігають в пам'яті і використовують для визначення еквівалентного числа обірваних тросів N пі в поперечному перерізі стрічки в зоні i-го пошкодження тросової основи згідно з алгоритмом æu- + u+ ö пі ÷ N T ç пі è ø (2) N пі = к э × × , ± к 2 ×U c к де э - поправочний коефіцієнт, що враховує умови формування інформаційних сигналів в зонах пошкоджень тросової основи і на межах стикових з'єднань (визначений експериментальним шляхом, к э = 1,25 ); NT - кількість тросів в стрічці конвеєра, од.; к - кількість ступенів в стиковому з'єднанні стрічки, од.; причому розрахункове значення параметра N пі реєструють, зберігають в пам'яті і використовують як порівнювальну величину з гранично допустимим її значенням. При цьому цикл контролю характеризується одним повним обертом стрічки, завершення якого визначається, коли через зону контролю пройдуть всі стикові з'єднання стрічки. Використання інформаційних сигналів від технологічних пошкоджень на межах стикових з'єднань для формування еталонного сигналу правомірно. Експериментально встановлено, що величина вказаних сигналів тісно корелює з кількістю вир убаних тросів NTB на межах стикових з'єднань, виконаних згідно з «Правилами эксплуатации подземных ленточных и пластинчатых конвейеров на угольных и сланцевых шахтах» (М., 1980. - 222с, с.142). Причому, величина NTB однозначно залежить від типу стикових з'єднань, тобто від схеми укладання тросів (одно-, дво- і триступенева) і визначається як частка від ділення числа тросів в стрічці на кількість ступенів в стиковому з'єднанні. Поставлене завдання вирішується також тим, що при оцінці стану тросової основи в межах ширини кожного з n каналів контролю, в якості еталонного сигналу використовують розрахункову середньостатистичну величину амплітудних зна 7 39843 чень інформаційних сигналів, сформованих на межах стикових з’єднань стрічки відповідного, наприклад, m-го каналу контролю (1 £ m £ n) , для чого їх вимірюють, реєструють і зберігають в па± м'яті, а шукану величину критерію U mc визначають згідно з формулою Nc + å æ umcj + umcj ö ç ÷ (3) è ø ± = j=1 U mc , 2× N c + де umcj , umcj - модулі амплітудних значень позитивної і негативної фаз інформаційного сигналу, сформованого на межах j-го стикового з'єднання в межах ширини m-го каналу контролю, мВ; вимірюють також амплітудні значення негати+ umпі вної uфаз інформаційного mпп і позитивної сигналу, сформованого в зоні i-го пошкодження тросової основи в межах ширини m-го каналу контролю, при цьому їх модулі і розрахункове значення критерію реєструють, зберігають в пам'яті і використовують для визначення еквівалентної кількості обірваних тросів N mпп в зоні і-го пошкодження тросової основи в межах ширини m-го каналу контролю стрічки, згідно з алгоритмом æu- + u+ ö N T ç mпп mпп÷ è ø (4) N mпп к э × = × , ± n× к 2 ×U mc а еквівалентну кількість обірваних тросів в поперечному перерізі стрічки визначають як суму пошкоджень тросової основи, розташованих в одному поперечному перерізі стрічки в різних каналах контролю. При цьому ширина каналу контролю визначається шириною стрічки і кількістю каналів контролю, тобто ВК = Вл / n . Поставлене завдання вирішується також і тим, що в якості розрахункової величини при визначенні еталонного значення сигналу і кількості обірваних тросів в поперечному перерізі стрічки і кожного каналу контролю використовують амплітудне значення однієї з фаз інформаційного сигналу. Це забезпечує спрощення реалізації критеріїв еталонних значень інформаційних сигналів і алгоритмів визначення величини дефектів тросової основи в межах всього поперечного перерізу стрічки і окремих каналів контролю. Крім того, спрощується програмне забезпечення, що додатково підвищує надійність контролю. Запропонований спосіб контролю в порівнянні з прототипом має ряд істотних переваг: а) підвищується точність контролю за рахунок: використання більш достовірних і більш надійних критеріїв еталонних значень сигналів, визначених на основі інформаційних сигналів, сформованих на межах стикових з'єднань з фіксованою кількістю N вирубаних тросів TB стрічки в межах її поперечного перерізу і окремих каналів контролю; забезпечення практично однакових умов при форму 8 ванні еталонних значень сигналу і інформаційних сигналів від пошкоджень тросової основи стрічки; зниження апаратурної похибки завдяки використанню одного і того ж вимірювального тракту для інформаційних сингалів як від еталона, так і від пошкоджень тросової основи; використання більш ефективних алгоритмів для визначення величини дефектів тросової основи в межах поперечною перерізу стрічки і окремих каналів контролю, які базуються на використанні технологічних пошкоджень тросової основи на межах всіх стикових з'єднань стрічки. Все це забезпечує більш досконалий рівень формування і обробки інформації. Фактично забезпечуються автоматичний контроль, вимірювання, реєстрація і зберігання в пам'яті інформаційних сигналів всього спектра пошкоджень тросової основи, а також підвищення якості представлення отриманої інформації про стан тросової основи стрічки конвеєра; б) підвищення надійності контролю завдяки: спрощенню апаратурної реалізації запропонованого способу контролю, оскільки відпала необхідність у використанні окремого n + 1 каналу контролю в первинному перетворювачі і комутуючого елемента в електронному блоці; розширенню зон відбору інформації від об'єкта контролю, наприклад, за рахунок установки первинного перетворювача на холостій гілці стрічки конвеєра в зонах прямого протяжного ролика або очищувача стрічки, що забезпечує зниження негативного впливу промислових перешкод і підвищення зручності в обслуговуванні та експлуатації пристрою; в) підвищення ефективності контролю за рахунок указаних вище факторів а) і б), а також підвищення якості контролю та можливості прогнозування аварійно небезпечних пошкоджень завдяки безперервному контролю та автоматизації обробки всього спектра пошкоджень тросової основи стрічки. На Фіг. наведена структурна схема пристрою, що реалізує запропонований спосіб, а також деякі складові частини конвеєрної установки і форма інформаційних сигналів від те хнологічних і локальних пошкоджень тросової основи в стрічці конвеєра. Об'єктом контролю є гумотросова стрічка 1, яка приводиться в рух за допомогою приводного барабана 2 і блока 3 електропривода конвеєра. Пристрій містить багатоканальний первинний перетворювач 4 індукційного типу, кожен з n каналів якого виконаний у вигляді набору чутливи х елементів на основі постійних магнітів і перетворюючого елемента - вимірювальної котушки, електронний блок 5, до якого входять блок 6 активних фільтрів низької частоти, аналоговий комутатор 7, регульований підсилювач 8, блок 9 регульованого генератора частоти, а також електронний реєстратор 10 з блоком 11 керування виконавчим органом і персональний комп'ютер 12. При цьому виходи первинного перетворювача 4 зв'язані з входами електронного блока 5 і блока 6 активних фільтрів нижньої частоти, виходи якого з'єднані з мультиплексорними входами аналогового комутатора 7, мультиплексорний вихід якого зв'язаний з входом регульованого підсилювача 8, 9 39843 вихід якого з'єднаний з демультиплексорним входом аналогового комутатора 7, виходом 1 електронного блока 5 і входом реєстратора 10, причому керувальні входи аналогового комутатора 7 зв'язані з одними виходами блока 9 регульованого генератора частоти імпульсів, другі виходи якого і демультиплексорні виходи аналогового комутатора 7 зв'язані відповідно з третім і другим виходами електронного блока 5 і відповідними входами реєстратора 10, вихід-вхід якого зв'язаний безпосередньо з персональним комп'ютером 12, а другий вихід є ви ходом блока 11 керування виконавчим органом, який зв'язаний з колами керування електропривода 3. Функціональні блоки пристрою реалізуються з використанням відомих те хнічних рішень, а тому на Фіг. не всі розкриті. Так, блок 9 регульованого генератора частоти імпульсів виконано по схемі частотоміра, а електронний реєстратор 10 - відомий цифровий багатоканальний реєстратор Flash Recorder - SD (фірма «ADClab» - Росія, www.ADClab.ru). Відомий реєстратор виконаний на основі центрального мікроконтролера, блока АЦП (аналогоцифрових перетворювачів), портів вводу-виводу, блоків внутрішньої і зовнішньої нам'яті (ФЛЕШ ЗУ), блока керування, блока індикації, формувача сигналу зовнішнього запуску, кварцового генератора, блока джерела живлення, блока 11 керування виконавчим органом. При цьому блок зовнішньої пам'яті реєстратора 10 використовується для зберігання інформації про стан тросової основи стрічки, а блок внутрішньої пам'яті для зберігання програм і настройок пристрою на об'єкт контролю. Програмне забезпечення вказаного реєстратора 10 включає такі основні блоки, як: блок пуску програми; блок введення даних; блок настройки на об'єкт контролю; блок керування; блок контролю і вимірювання, реєстрації, зберігання і формування команди на індикацію амплітудних значень інформаційних сигналів; блок обчислення, реєстрації, зберігання і формування команди на індикацію розрахункових значень реалізованих алгоритмів; блок порівняння розрахункових і гранично допустимих значень контрольованої величини; блок формування рішень по отриманих результатах контролю; блок видачі інформації на індикацію та керувальних дій. Для забезпечення нормального функціонування пристрою в передпусковий період здійснюють введення в реєстратор 10 необхідних початкових даних по конвеєру, стрічці, пристрою, гранично допустимих значеннях дефектів тросової основи, поправочних коефіцієнтах та ін. Після цього, за допомогою електронного реєстратора 10 і персонального комп'ютера 12, проводять конфігурацію пристрою, для чого здійснюють запуск програми шляхом подачі електричних сигналів з блока 9 регульованого генератора частоти імпульсів на формувач сигналів зовнішнього запуску електронного реєстратора 10. Проводять пуск конвеєра і здійснюють намагнічування тросової основи стрічки за допомогою постійних магнітів установленого на об'єкті пер 10 винного перетворювача 4, для чого стрічка повинна зробити 5-7 обертів. В місцях дефектів тросової основи стрічки (локальних в стрічці та технологічних на межах стикових з'єднань) виникають магнітні поля розсіювання, які за допомогою вимірювальних котушок кожного каналу контролю первинного перетворювача 4 перетворюються в пропорційні величині дефекту електричні інформаційні сигнали. При цьому величина і форма інформаційного сигналу однозначно характеризує дефект (пошкодження) тросової основи стрічки. Інформаційні сигнали, сформовані в зонах дефектів тросової основи і стикових з'єднань стрічок, мають форму двополярного сигналу (Фіг.). У першому випадку формується негативна напівхвиля (фаза) uпі сигналу, задній фронт якої після переходу через нуль трансформується в передній + фронт позитивної папівхвилі uпі сигналу. У зоні дефектів на межах стикового з'єднання спочатку + формується позитивна напівхвиля ucj (Межа 1), а ucj (Межа 2) сигналу. Тривалість вказаного інтервалу часу визначається, в основному, довжиною стикового з'єднання Lc і швидкістю руху Vл контрольованої стрічки. Інформаційні сигнали в указаних зонах дефектів тросової основи стрічки близькі до трикутної форми і відрізняються між собою по величині ± ± ± uпі < u± і тривалості t пі < t cj . cj Інформаційні електричні сигнали з виходів каналів контролю (1- n) первинного перетворювача 4 поступають на входи електронного блока 5 і далі на входи блока 6 активних фільтрів нижньої частоти, який забезпечує захист пристрою від високочастотних електромагнітних перешкод, що інтенсивно діють в промислових умовах. З ви ходу блока 6 інформаційні сигнали поступають на мультиплексорні входи аналогового комутатора 7, на мультилексорному виході Sк якого формується сумарний сигнал, відповідний всьому поперечному перерізу стрічки. Черговість підключення каналів контролю до загального вимірювального тракту задається кодовими комбінаціями імпульсів керування, які формуються блоком 9 регульованого генератора частоти імпульсів і подаються з одних ви ходів останнього на керувальні входи аналогового комутатора 7. Аналоговий комутатор 7 виконує мультиплексування сигналів, що надходять через блок 6 активних фільтрів нижньої частоти з первинного перетворювача 4, і демультиплексування сигналу з виходу регульованого підсилювача 8. Далі інформаційні сигнали з демультиплексорних виходів аналогового комутатора 7, виходу регульованого підсилювача 8 і других виходів блока 9 регульованого генератора частоти імпульсів поступають на виходи 2, 1, 3 електронного блока 5 і на відповідні входи електронного реєстратора 10, де виконуєтьчерез деякий інтервал часу - негативна фаза 11 39843 ся обробка сигналу згідно з формулами (1-4). У електронному реєстраторі 10 також формується, відображається, реєструється і зберігається в пам'яті інформація про місцеположення виявлених пошкоджень по довжині і ширині стрічки. Вимірювання амплітудних значень, сформованих від пошкоджень тросової основи інформа+ ційних сигналів uпі , uпі - в пристрої реєструється безперервно, по мірі їх проходження через зону контролю первинного перетворювача 4. Згідно з програмним забезпеченням реєстратора 10 блоки програм обчислення, реєстрації, зберігання і формування команд на індикацію розрахункових значень реалізованих формул (1-4) включаються в роботу автоматично. При цьому обробка інформації ведеться за даними, зареєстрованими в зовнішній пам'яті електронного реєстратора 10. Алгоритм обробки забезпечує порівняння і фіксує (реєструє) факт перевищення розрахованими значеннями, отриманими згідно з алгоритмами (2) і (4), гранично допустимих значень кількості обірваних тросів в поперечному перерізі стрічки і поперечному перерізі стикового з'єднання. В цьому випадку включається в роботу блок 11 керування виконавчим органом, який вимикає блок електропривода конвеєра 3, у блоці індикації електронного реєстратора 10 включається сигналізація «Аварія», в блоці зовнішньої пам'яті реєструється і зберігається інформація про місцеположення дефекту тросової основи по ширині (канал контролю) і по довжині стрічки (відстань до стикового з'єднання), а візуальне відображення отриманої інформації здійснюється на моніторі персонального комп'ютера 12. В інших випадках на блоці індикації електронного реєстратора 10 спалахує тільки сигналізація про наявність пошкодження в каналах контролю 12 тросової основи рухомої стрічки. Після повного оберту стрічки відбувається автоматичний перехід роботи програми на початок нового циклу (відповідно до встановленої конфігурації роботи пристрою). Величина дефектів (пошкоджень) тросової основи рухомої стрічки по каналах контролю визначається аналогічним чином за рахунок реалізації формул (3) і (4), а альтернативний варіант розрахунку величини дефектів (пошкоджень) тросової основи по всьому поперечному перерізі стрічки визначається як сума дефектів тросової основи розташованих в поперечному перерізі стрічки в різних каналах контролю. Перед початком експлуатації пристрою виконують його початкову настройку шляхом ручного регулювання (вибору): - величини передавального коефіцієнта вимірювального тракту пристрою (коефіцієнта підсилення регульованого підсилювача 8); - частоти послідовності імпульсів f1 на виході блока 9 регульованого генератора частоти. Перша настройка забезпечує узгодження вихідних сигналів електронного блока 5 з вимогами до вхідних сигналів електронного реєстратора 10. Друга настройка необхідна для виконання рівності f1 = Vл , що забезпечує реєстрацію місцеположення дефекту (пошкодження), наприклад по його відстані щодо останнього стикового з'єднання, яке пройшло через зону контролю первинного перетворювача 4. Таким чином, запропонований спосіб забезпечує підвищення точності, надійності і ефективності автоматичного контролю при виявленні локальних і технологічних де фектів тросової основи рухомої стрічки конвеєра. 13 Комп’ютерна в ерстка Л. Купенко 39843 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automated control of defects of cable basis of movable band of conveyor
Автори англійськоюDovzhenko Volodymyr Profyrovych, Novikov Yevhen Petrovych, Krasnyk Viacheslav Hryhorovych, Berezhynskyi Volodymyr Izrailevych, Holovan Serhii Oleksiiovych, Levin Yevhen Oleksandrovych, Odariuk Oleksandr Ivanovych
Назва патенту російськоюСпособ автоматического контроля дефектов тросовой основы подвижной ленты конвейера
Автори російськоюДовженко Владимир Профирьевич, Новиков Евгений Петрович, Красник Вячеслав Григорьевич, Бережинский Владимир Израилевич, Головань Сергей Алексеевич, Левин Евгений Александрович, Одарюк Александр Иванович
МПК / Мітки
МПК: G01N 27/80
Мітки: контролю, спосіб, дефектів, автоматичного, конвеєра, тросової, стрічки, рухомої, основі
Код посилання
<a href="https://ua.patents.su/7-39843-sposib-avtomatichnogo-kontrolyu-defektiv-trosovo-osnovi-rukhomo-strichki-konveehra.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматичного контролю дефектів тросової основи рухомої стрічки конвеєра</a>
Пристрій автоматичного захисту від загоряння стрічки конвеєра
Номер патенту: 38018
Опубліковано: 15.05.2001
Автори: Ільченко Людмила Володимирівна, Ільїн Євген Андрійович
МПК: B65G 43/04
Мітки: захисту, конвеєра, загоряння, автоматичного, пристрій, стрічки
Формула / Реферат:
Пристрій автоматичного захисту від загоряння стрічки конвеєра, який має датчик температури, перетворювально-підсилювальні блоки і контакти аварійного відключення конвеєра, який відрізняється тим, що чутливий елемент датчика температури стрічки є конденсатор, який складається з жорстко укріплених на станині конвеєра двох металевих смуг, розташованих із зазором так, що одна знаходиться над, а інша - під порожняковою стрічкою конвеєра,...
Пристрій для автоматичного контролю поверхневих дефектів
Номер патенту: 20913
Опубліковано: 07.10.1997
Автори: Соловей Володимир Олексійович, Борисенко Олексій Андрійович, Путятін Євгеній Петрович
МПК: G01N 21/88
Мітки: дефектів, поверхневих, автоматичного, контролю, пристрій
Формула / Реферат:
Устройство для автоматического контроля поверхностных дефектов, содержащее телекамеру, компаратор, схему совпадения, выход которой соединен с первым входом схемы вывода, счетчик строк, выход которого соединен с входом дешифратора, счетчик адреса, выход которого соединен с входом блока памяти, второй выход которого соединен с первым входом счетчика приращений, второй вход и второй выход соединены с первым выходом и третьим входом первой схемы...
Спосіб керування ракетою з багатокамерним двигуном на стартовому відрізку траєкторії, стартуючої з рухомої основи
Номер патенту: 51758
Опубліковано: 16.12.2002
Автори: Дегтярьова Олена Анатоліївна, Андронов Артур Семенович, Морозов Валерій Матвійович
МПК: F42B 15/00, F41F 3/00
Мітки: двигуном, керування, ракетою, відрізку, стартуючої, стартовому, траєкторії, рухомої, основі, багатокамерним, спосіб
Формула / Реферат:
Спосіб керування ракетою з багатокамерним двигуном на початковому відрізку траєкторії, що стартує з рухомої основи, який включаює операції визначення висоти підйому ракети, кутового та лінійного пересування ракети і видачі команд на виконавчі органи керування ракетою для відпрацьовування збурень, який відрізняється тим, що здійснюють програмний доворот усіх керуючих камер згоряння двигуна ракети до площини, яка перпендикулярна «небезпечному...
Пристрій для очищення стрічки конвеєра
Номер патенту: 35311
Опубліковано: 10.09.2008
Автори: Тимченко Галина Олександрівна, Ковальов Микола Григорович
МПК: B65G 45/00
Мітки: пристрій, конвеєра, очищення, стрічки
Формула / Реферат:
1. Пристрій для очищення конвеєрної стрічки, який містить опорну конструкцію, закріплений на ній тримач, на якому за допомогою вузла кріплення встановлені пластинкові кронштейни, із закріпленими на них скребковими пластинами, що розташовані з можливістю взаємодії з конвеєрною стрічкою, який відрізняється тим, що скребкові пластини встановлені за допомогою кріпильних елементів на притискних кронштейнах, жорстко закріплених на пластинкових...
Пристрій для очищення стрічки конвеєра
Номер патенту: 36726
Опубліковано: 10.11.2008
Автори: Арєф'єв Євген Михайлович, Будішевський Володимир Олександрович, Дерев'янський Вадим Юрієвич
МПК: B65G 45/00
Мітки: стрічки, конвеєра, пристрій, очищення
Формула / Реферат:
Пристрій для очищення стрічки конвеєра, що включає встановлені на підпружиненій рамі вібратор з роликом, який відрізняється тим, що додатково має електронагрівальний елемент, розташований перед рамою під конвеєрною стрічкою.
Попередній патент: Рекламний щит
Наступний патент: Спосіб підвищення якості керуючих програм для логічних контролерів
Випадковий патент: Пристрій для внутрішнього металоостеосинтезу