Синхронна магнітоелектрична машина
Формула / Реферат
1. Синхронна магнітоелектрична машина, яка містить корпус, перший статор із першою частиною робочої якірної обмотки, змонтований на робочому валу машини ротор із вмонтованими у нього магнітними полюсними елементами системи збудження машини, виконаними на основі постійних магнітів, другий статор та систему регулювання електрорушійної сили, яка відрізняється тим, що на другому статорі розміщена друга частина робочої якірної обмотки, причому перша та друга частини робочої якірної обмотки з'єднані між собою електричним з'єднанням послідовно, а система регулювання електрорушійної сили пристосована для можливості розміщення першого та другого статорів під геометричним кутом (α) один до одного, який може змінюватись.
2. Синхронна магнітоелектрична машина за п. 1, яка відрізняється тим, що система регулювання електрорушійної сили пристосована для фіксації першого та другого статорів один відносно іншого в одному із декількох можливих кутових положень.
3. Синхронна магнітоелектрична машина за п. 2, яка відрізняється тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої в одному із декількох можливих кутових положень нерухомо зафіксований у отворі задньої кришки корпусу.
4. Синхронна магнітоелектрична машина за п. 2, яка відрізняється тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої нерухомо зафіксований у отворі ступиці задньої кришки корпусу тільки в одному можливому кутовому положенні, а задня кришки нерухомо прикріплена до корпусу в одному із декількох можливих кутових положень.
5. Синхронна магнітоелектрична машина за п. 1, яка відрізняється тим, що система регулювання електрорушійної сили пристосована для повороту першого та другого статорів один відносно іншого залежно від зміни визначеного параметра роботи машини та фіксації статорів один відносно іншого при стабільному визначеному параметрі.
6. Синхронна магнітоелектрична машина за п. 5, яка відрізняється тим, що система регулювання електрорушійної сили містить силовий елемент для створення зусилля, яке урівноважує момент, який діє на змонтований з можливістю повороту перший чи другий статор з боку ротора, при цьому зазначений поворотний статор при ненавантаженому силовому елементі зміщений відносно зовнішнього статора під визначеним геометричним початковим кутом (α) у напрямку, проти напрямку обертання ротора, а величина зусилля, створюваного силовим елементом, залежить від величини геометричного кута (α) між першим і другим роторами.
7. Синхронна магнітоелектрична машина за п. 6, яка відрізняється тим, що силовий елемент виконаний пружинного типу.
8. Синхронна магнітоелектрична машина за п. 7, яка відрізняється тим, що силовий елемент виконаний у вигляді пружинного важеля, перший кінець якого жорстко зв'язаний із змонтованим з можливістю повороту першим чи другим статором, а другий кінець розташований у зазорі між упорами, які закріплені відповідним засобом із можливістю регулювання їх положення у радіальному та тангенціальному напрямках.
9. Синхронна магнітоелектрична машина за п. 8, яка відрізняється тим, що засіб кріплення упорів містить напрямну кронштейна, пристосовану для переміщення у ній у радіальному напрямку упорів, і фіксатори упорів у напрямній, причому кронштейн пристосований для встановлення у різних фіксованих положеннях, які зміщені одне відносно іншого у тангенціальному напрямку.
10. Синхронна магнітоелектрична машина за п. 5, яка відрізняється тим, що система регулювання електрорушійної сили містить активний привід, зв'язаний із змонтованим із можливістю повороту першим чи другим статором, та засіб керування активним приводом, пристосований для реагування на зміну визначеного параметра роботи машини.
11. Синхронна магнітоелектрична машина за п. 10, яка відрізняється тим, що активний привід виконаний електромеханічним ізв'язаний із змонтованим із можливістю повороту першим чи другим статором через самогальмівну передачу типу черв'ячної, гвинтової чи іншої подібної передачі.
12. Синхронна магнітоелектрична машина за п. 10, яка відрізняється тим, що засіб керування активним приводом виконаний у вигляді електронної системи керування, яка пристосована для реагування на відхилення напруги на електричних затискачах машини чи іншого визначеного параметра роботи машини від встановленого значення шляхом включення активного приводу на переміщення його вихідного елемента у напрямку, який потрібен для коригування геометричного кута (α) між першим і другим статорами для відновлення встановленого значення напруги чи іншого визначеного параметра роботи машини.
13. Синхронна магнітоелектрична машина за п. 5, яка відрізняється тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої пропущений назовні корпусу через отвір задньої кришки із можливістю повороту, при цьому розташований назовні корпусу задній кінець осі зв'язаний із системою регулювання електрорушійної сили.
14. Синхронна магнітоелектрична машина за п. 5, яка відрізняється тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко зв'язаний із задньою кришкою корпусу, яка змонтована у корпусі із можливістю повороту і зв'язана із системою регулювання електрорушійної сили.
15. Синхронна магнітоелектрична машина за будь-яким з попередніх пунктів, яка відрізняється тим, що перший статор виконаний у вигляді зовнішнього статора, який жорстко встановлений у корпусі машини і охоплює ротор, виконаний у вигляді порожнистого стакана, який має основу із ступицею, жорстко посадженою на робочий вал машини, який пропущений назовні корпусу через його передню кришку, та порожнисту циліндричну частину із магнітними полюсними елементами, яка з боку, що протилежний основі, закрита знімною кришкою, що встановлена за допомогою підшипникового вузла на осі, другий статор виконаний у вигляді розміщеного всередині порожнистого стакана ротора внутрішнього статора, який жорстко встановлений на зазначеній осі, задній кінець якої встановлений у задній кришці корпусу, при цьому задній кінець робочого вала машини за допомогою підшипникового вузла зв'язаний із переднім кінцем зазначеної осі.
16. Синхронна магнітоелектрична машина за будь-яким з попередніх пунктів, яка відрізняється тим, що система регулювання електрорушійної сили містить одну або декілька батарей конденсаторів, пристосованих для підключення паралельно якірній обмотці автоматичним контактним або тиристорним комутаційним пристроєм.
17. Синхронна магнітоелектрична машина за будь-яким з попередніх пунктів, яка відрізняється тим, що друга частина робочої якірної обмотки, що виконана на другому статорі, пристосована для генерування електрорушійної сили, яка становить 20-70 від електрорушійної сили, яка генерується першою частиною робочої якірної обмотки, що виконана на першому статорі.
18. Синхронна магнітоелектрична машина за будь-яким з попередніх пунктів, яка відрізняється тим, що вона виконана із кількістю пар магнітних полюсів (p) від одної до шести.
Текст
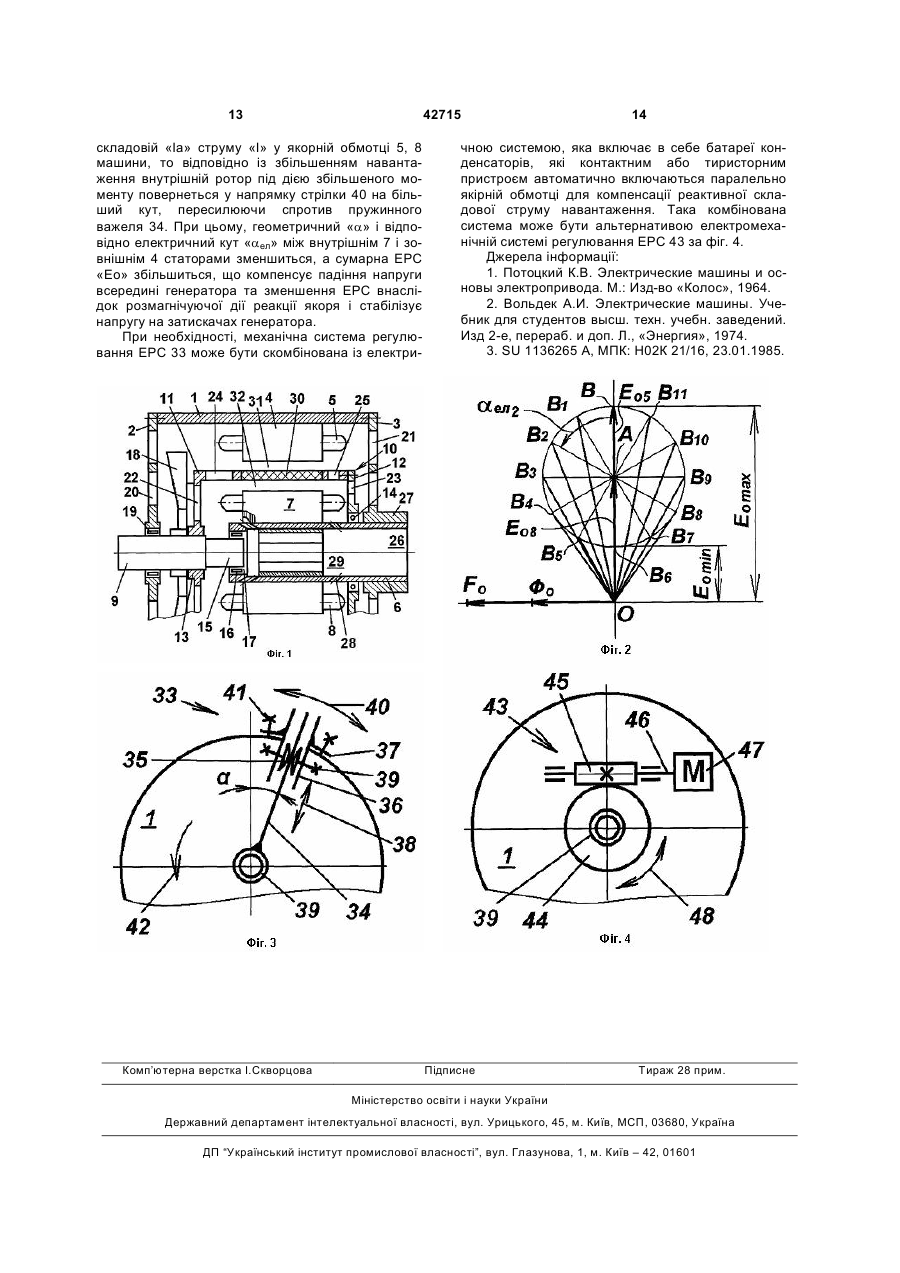
1. Синхронна магнітоелектрична машина, яка містить корпус, перший статор із першою частиною робочої якірної обмотки, змонтований на робочому валу машини ротор із вмонтованими у нього магнітними полюсними елементами системи збудження машини, виконаними на основі постійних магнітів, другий статор та систему регулювання електрорушійної сили, яка відрізняється тим, що на другому статорі розміщена друга частина робочої якірної обмотки, причому перша та друга частини робочої якірної обмотки з'єднані між собою електричним з'єднанням послідовно, а система регулювання електрорушійної сили пристосована для можливості розміщення першого та другого статорів під геометричним кутом (α) один до одного, який може змінюватись. 2. Синхронна магнітоелектрична машина за п. 1, яка відрізняється тим, що система регулювання електрорушійної сили пристосована для фіксації першого та другого статорів один відносно іншого в одному із декількох можливих кутових положень. 3. Синхронна магнітоелектрична машина за п. 2, яка відрізняється тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої в одному із декількох можливих кутових положень нерухомо зафіксований у отворі задньої кришки корпусу. 4. Синхронна магнітоелектрична машина за п. 2, яка відрізняється тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої нерухомо зафіксований у отворі ступиці задньої кришки корпусу тільки в одному можливому кутовому положенні, а задня кришки нерухомо прикріплена до корпусу в одному із декількох можливих кутових положень. 5. Синхронна магнітоелектрична машина за п. 1, яка відрізняється тим, що система регулювання електрорушійної сили пристосована для повороту першого та другого статорів один відносно іншого залежно від зміни визначеного параметра роботи 2 (19) 1 3 42715 4 статором через самогальмівну передачу типу черв'ячної, гвинтової чи іншої подібної передачі. 12. Синхронна магнітоелектрична машина за п. 10, яка відрізняється тим, що засіб керування активним приводом виконаний у вигляді електронної системи керування, яка пристосована для реагування на відхилення напруги на електричних затискачах машини чи іншого визначеного параметра роботи машини від встановленого значення шляхом включення активного приводу на переміщення його вихідного елемента у напрямку, який потрібен для коригування геометричного кута (α) між першим і другим статорами для відновлення встановленого значення напруги чи іншого визначеного параметра роботи машини. 13. Синхронна магнітоелектрична машина за п. 5, яка відрізняється тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої пропущений назовні корпусу через отвір задньої кришки із можливістю повороту, при цьому розташований назовні корпусу задній кінець осі зв'язаний із системою регулювання електрорушійної сили. 14. Синхронна магнітоелектрична машина за п. 5, яка відрізняється тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко зв'язаний із задньою кришкою корпусу, яка змонтована у корпусі із можливістю повороту і зв'язана із системою регулювання електрорушійної сили. 15. Синхронна магнітоелектрична машина за будьяким з попередніх пунктів, яка відрізняється тим, що перший статор виконаний у вигляді зовнішнього статора, який жорстко встановлений у корпусі машини і охоплює ротор, виконаний у вигляді порожнистого стакана, який має основу із ступицею, жорстко посадженою на робочий вал машини, який пропущений назовні корпусу через його передню кришку, та порожнисту циліндричну частину із магнітними полюсними елементами, яка з боку, що протилежний основі, закрита знімною кришкою, що встановлена за допомогою підшипникового вузла на осі, другий статор виконаний у вигляді розміщеного всередині порожнистого стакана ротора внутрішнього статора, який жорстко встановлений на зазначеній осі, задній кінець якої встановлений у задній кришці корпусу, при цьому задній кінець робочого вала машини за допомогою підшипникового вузла зв'язаний із переднім кінцем зазначеної осі. 16. Синхронна магнітоелектрична машина за будьяким з попередніх пунктів, яка відрізняється тим, що система регулювання електрорушійної сили містить одну або декілька батарей конденсаторів, пристосованих для підключення паралельно якірній обмотці автоматичним контактним або тиристорним комутаційним пристроєм. 17. Синхронна магнітоелектрична машина за будьяким з попередніх пунктів, яка відрізняється тим, що друга частина робочої якірної обмотки, що виконана на другому статорі, пристосована для генерування електрорушійної сили, яка становить 20-70 від електрорушійної сили, яка генерується першою частиною робочої якірної обмотки, що виконана на першому статорі. 18. Синхронна магнітоелектрична машина за будьяким з попередніх пунктів, яка відрізняється тим, що вона виконана із кількістю пар магнітних полюсів (p) від одної до шести. Корисна модель відноситься до синхронних магнітоелектричних машин, насамперед до синхронних магнітоелектричних машин загального призначення - синхронних електричних генераторів чи двигунів. Широковідомі синхронні електричні генератори, які складаються із нерухомої частини - статора, в пазах якого розміщена, як правило трьохфазна, обмотка змінного струму, та частини, що обертається, - ротора, який виконаний у вигляді електромагніту із обмотками збудження. Обмотки збудження ротора живляться через щітки і кільця постійним струмом від збуджувача, тобто машини постійного струму чи якогось випрямляча. При проходженні по обмотках статора (його ще називають якорем) струму навантаження створюється магнітне поле. Основна частина магнітного потоку якоря проходить у ротор і діє на нього. Цю дію називають реакцією якоря. Синхронні генератори, як правило, розраховані на роботу із активноіндуктивним навантаженням на мережу із коефіцієнтом навантаження cos j = 0,8. Індуктивна складова струму навантаження призводить до розмагнічуючої дії реакції якоря і зниження напруги на електричних затискачах (полюсах) генератора. Для підтримання напруги на затискачах генерато ра постійною при змінному навантаженні відповідним чином регулюють струм в обмотках збудження ротора [1, с. 217¸285]. Система збудження цих генераторів е відносно складною та вимагає істотних енергетичних затрат на підтримання струму в обмотках збудження, що загалом знижує коефіцієнт корисної дії генераторів. Відносно складна конструкція відомих генераторів знижує їх надійність. Відомо, що більшість неполадок у роботі синхронних машин викликано несправностями системи збудження [1, с. 476¸477]. Крім того, ці генератори мають недостатньо високі масогабаритні показники віднесені до певної потужності. Відомі магнітоелектричні машини постійного струму без обмотки збудження, яка замінена постійними магнітами (зокрема із сплавів марки алні чи ЮНД (АІ-Nі), марки алніко чи ЮНДК (АІ-Nі-Со) чи інших марок, які мають високі магнітні властивості), зокрема виконавчі двигуни із якорним керуванням потужністю до 50-100 Вт [2, с. 230]. Там же вказано на те, ідо можливо будувати генератори і двигуни постійного струму загального призначення потужністю до 5¸10 кВт. Відомі синхронні електричні двигуни та генератори, у яких замість обмоток збудження викори 5 стані постійні магніти, а тому їх можна називати синхронними магнітоелектричними машинами [2, с. 794]. Двигуни мають потужність до 30¸40 Вт, а генератори будують потужністю 5¸10 кВа, а у окремих випадках до 100 кВА. Незважаючи на спрощення конструкції магнітоелектричних машин та виключення енергетичних втрат на збудження, як зазначено у [2; с. 230, 794], внаслідок високої ціни вказаних магнітних матеріалів такі машини не отримали широкого розповсюдження. Однак, висока ціна магнітних матеріалів не є єдиною причиною такого стану. Важливо також те, що незважаючи на чисельні спроби до цих пір не створено конструкцій магнітоелектричних машин, які забезпечують високий рівень використання матеріалу постійних магнітів та ефективне просте регулювання електрорушійної сили чи обертаючого моменту на валу магнітоелектричної машини, наприклад для підтримання постійної напруги на електричних затискачах (полюсах) синхронного магнітоелектричного генератора при коливаннях навантаження на генератор. На підтвердження сказаного, можна розглянути відому синхронну магнітоелектричну машину, зокрема генератор, який складається із першого (зовнішнього) статора із обмоткою звичайної конструкції та ротора (індуктора), виконаного у вигляді порожнистого стакана, укріпленого консольне на валу генератора. У кільце стінки стакана вмонтовані намагнічені у радіальному напрямку призматичні постійні магніти, внутрішні полюси яких замкнуті кільцеподібним ярмом, що підмагнічується системою регулювання електрорушійної сили (ЕРС) генератора. Ця система включає у себе розміщений у розточці ярма і встановлений консольне на щиті корпусу генератора нерухомий сердечник (другий чи внутрішній статор) із двома різнойменними оберненими до кільцеподібного підмагнічуваного ярма полюсами, на яких змонтована обмотка постійного струму. За рахунок підмагнічавання ярма до насичення знижують його магнітну провідність і магнітний потік ротора, а відповідно ЕРС генератора [3]. Недоліком таких генераторів є те, що, по-перше, система регулювання ЕРС генератора у будь-якому випадку не може сприяти генеруванню електричної потужності генератора і за рахунок власних масогабаритних показників погіршує відповідні показники генератора. По-друге, ця система потребує джерела постійного струму, що ускладнює використання генератора. По-третє, у роторі створюється нерухоме магнітне поле, яке при обертанні ротора може генерувати у ньому індуктивні токи, що ускладнює його конструкцію, підвищує втрати потужності та виділення тепла у роторі і відповідно ускладнює систему охолодження генератора. Суттєвим недоліком цієї машини та інших відомих електричних машин із порожнистим ротором е проблеми із забезпеченням механічної міцності та жорсткості конструкції порожнистого ротора та збільшення повітряного зазору у магнітній системі, що знижує магнітну індукцію у робочій зоні машини. Немає відомостей про використання порожнистого ротора у реально існуючих промислових синхронних електричних машинах загального при 42715 6 значення порівняно великої потужності (порядку десятків та сотень кіловат). Відомо, тільки використання порожнистого ротора, який розташований у зазорі між зовнішнім і внутрішнім статорами, у конструкціях виконавчих двигунів постійного струму малої потужності (10¸15 Вт) [2, с.230-231, рис. 11-8]. Технічна задача корисної моделі полягає у тому, щоб створити синхронну магнітоелектричну машину, яка поєднує у собі переваги магнітоелектричних машин із перевагами традиційних синхронних машин із обмоткам збудження постійного струму за рахунок пристосування машини для простого, ефективного і надійного регулювання електрорушійної сили і таким чином напруги на затискачах машини-генератора чи обертаючого моменту машини-двигуна. Технічна задача вирішена тим, що у синхронній магнітоелектричній машині, яка включає в себе корпус, перший статор із першою частиною робочої якірної обмотки, змонтований на робочому валу машини ротор із вмонтованими у нього магнітними полюсними елементами системи збудження машини, виконаними на основі постійних магнітів, другий статор та систему регулювання електрорушійної сили, згідно із корисною моделлю на другому статорі розміщена друга частина робочої якірної обмотки, причому перша та друга частини робочої якірної обмотки з'єднані між собою електричним з'єднанням послідовно, а система регулювання електрорушійної сили пристосована для можливості розміщення першого та другого статорів під геометричним кутом (a) один до одного, який може змінюватись. Причинно-наслідковий зв'язок між зазначеною вище сукупністю суттєвих ознак корисної моделі та зазначеним технічним результатом ясно демонструється описом корисної моделі та кресленнями. У окремих випадках використання корисної моделі зазначений технічний результат посилюється та доповнюється іншими позитивними властивостями запропонованої машини тим, що система регулювання електрорушійної сили пристосована для фіксації першого та другого статорів один відносно іншого в одному із декількох можливих кутових положень. Також тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої в одному із декількох можливих кутових положень нерухомо зафіксований у отворі задньої кришки корпуса. Також тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої нерухомо зафіксований у отворі ступиці задньої кришки корпуса тільки в одному можливому кутовому положенні, а задня кришки нерухомо прикріплена до корпусу в одному із декількох можливих кутових положень. Також тим, що система регулювання електрорушійної сили пристосована для повороту першого та другого статорів один відносно іншого залежно від зміни визначеного параметру роботи машини та фіксації статорів один відносно іншого при стабільному визначеному параметрі. 7 Також тим, що система регулювання електрорушійної сили включає в себе силовий елемент для створення зусилля, яке урівноважує момент, який діє на змонтований з можливістю повороту перший чи другий статор з боку ротора, при цьому зазначений поворотний статор при ненавантаженому силовому елементі зміщений відносно зовнішнього статора під визначеним геометричним початковим кутом (a) у напрямку, проти напрямку обертання ротора, а величина зусилля, створюваного силовим елементом, залежить від величини геометричного кута (a) між першим і другим роторами. Також тим, що силовий елемент виконаний пружинного типу. Також тим, що силовий елемент виконаний у вигляді пружинного важеля, перший кінець якого жорстко зв'язаний із змонтованим з можливістю повороту першим чи другим статором, а другий кінець - розташований у зазорі між упорами, які закріплені відповідним засобом із можливістю регулювання їх положення у радіальному та тангенціальному напрямках. Також тим, що засіб кріплення упорів включає в себе напрямну кронштейна, пристосовану для переміщення у ній у радіальному напрямку упорів, і фіксатори упорів у напрямній, причому кронштейн пристосований для встановлення у різних фіксованих положеннях, які зміщені одне відносно іншого у тангенціальному напрямку. Також тим, що система регулювання електрорушійної сили включає в себе активний привід, зв'язаний із змонтованим із можливістю повороту першим чи другим статором, та засіб керування активним приводом, пристосований для реагування на зміну визначеного параметру роботи машини. Також тим, що активний привід виконаний електромеханічним і зв'язаний із змонтованим із можливістю повороту першим чи другим статором через самогальмівну передачу типу черв'ячної, гвинтової чи іншої подібної передачі. Також тим, що засіб керування активним приводом виконаний у вигляді електронної системи керування, яка пристосована для реагування на відхилення напруги на електричних затискачах машини чи іншого визначеного параметру роботи машини від встановленого значення шляхом включення активного приводу на переміщення його вихідного елемента у напрямку, який потрібен для коригування геометричного кута (a) між першим і другим статорами для відновлення встановленого значення напруги чи іншого визначеного параметру роботи машини. Також тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко встановлений на осі, задній кінець якої пропущений назовні корпусу через отвір задньої кришки із можливістю повороту, при цьому, розташований назовні корпуса задній кінець осі зв'язаний із системою регулювання електрорушійної сили. Також тим, що перший статор жорстко встановлений у корпусі машини, а другий статор жорстко зв'язаний із задньою кришкою корпуса, яка змон 42715 8 тована у корпусі із можливістю повороту і зв'язана із системою регулювання електрорушійної сили. Також тим, що перший статор виконаний у вигляді зовнішнього статора, який жорстко встановлений у корпусі машини і охоплює ротор, виконаний у вигляді порожнистого стакана, який має основу із ступицею, жорстко посадженою на робочий вал машини, який пропущений назовні корпуса через його передню кришку, та порожнисту циліндричну частину із магнітними полюсними елементами, яка з боку, що протилежний основі закрита знімною кришкою, що встановлена за допомогою підшипникового вузла на осі, другий статор виконаний у вигляді розміщеного всередині порожнистого стакана ротора внутрішнього статора, який жорстко встановлений на зазначеній осі, задній кінець якої встановлений у задній кришці корпуса, при цьому задній кінець робочого валу машини за допомогою підшипникового вузла зв'язаний із переднім кінцем зазначеної осі. Також тим, що система регулювання електрорушійної сили включає в себе одну або декілька батарей конденсаторів, пристосованих для підключення паралельно якірній обмотці автоматичним контактний або тиристорний комутаційним пристроєм. Також тим, що друга частина робочої якірної обмотки, що виконана на другому статорі, пристосована для генерування електрорушійної сили, яка становить 20¸70 % від електрорушійної сили, яка генерується першою частиною робочої якірної обмотки, що виконана на першому статорі. Також тим, що вона виконана із кількістю пар магнітних полюсів (р) від одної до шести. Корисна модель пояснюється кресленнями, на яких на: фіг. 1 зображена схема синхронної магнітоелектричної машини; фіг. 2 - векторна діаграма ЕРС у якірній обмотці при зміні кута між статорами; фіг. 3¸4 - варіанти виконання системи регулювання ЕРС. Запропонована синхронна магнітоелектрична машина за фіг. 1 містить корпус (станину) 1 із знімними передньою 2 та задньою 3 кришками (щитами); змонтований у корпусі перший (зовнішній) статор (якір) 4 із першою частиною 5 робочої якірної, наприклад трьохфазної, обмотки; закріплений на осі 6 другий (внутрішній) статор (якір) 7 із другою частиною 8 робочої якірної, наприклад трьохфазної, обмотки; та встановлений на робочому валу 9 машини порожнистий ротор 10, який виконаний у вигляді порожнистого стакана 11 закритого знімною кришкою 12. Ступиця 13 стакана 11 жорстко закріплена на робочому валі 9, а кришка 12 жорстко прикріплена (наприклад пригвинчена) до торця стакана 11. Для забезпечення механічної жорсткості конструкції і мінімальних деформацій кришка 12 встановлена через підшипник 14 (наприклад шарикопідшипник) на осі 6, а задній кінець 15 робочого валу 9 за допомогою підшипникового вузла 16 (наприклад роликового підшипника) зв'язаний із переднім кінцем зазначеної осі 6. У одному із можливих варіантів виконання задній кінець 15 робочого валу 9 за допомогою роликового підшипника 16 встановлений у розточці 17 переднього торця осі 6. У інших можливих виконаннях пе 9 редній кінець осі 6 може бути встановлений у розточці заднього кінця 15 робочого валу 9 за допомогою підшипника, або задній кінець 15 робочого валу 9 за допомогою підшипника може бути встановлений у розточці ступиці 13 стакана 11 ротора 10 (на кресленнях ці варіанти не показані). На робочому валі 9 жорстко закріплено робоче колесо осьового (пропелерного) вентилятора 18 і передній кінець цього валу 9 через підшипник 19, встановлений у передній кришці 2 корпусу 1, пропущений назовні корпусу 1. У кришках 2, 3, в основі та циліндричній частині стакана 11, кришці 12 виконані вентиляційні отвори, 20, 21, 22, 23, 24, 25, що служать для проходження охолоджуючого повітря. Виводи від другої частини 8 робочої якірної обмотки другого (внутрішнього) статора (якоря) 7 проходять через отвори 28 в осі 6 у порожнину 29 осі 6, яка відкрита з боку заднього кінця 26 (торця) осі 6, і підводяться до щита виводів (на кресленнях виводи і щит виводів не показані). По колу циліндричної частини стакана 11 ротора 10 розташовані гнізда, в яких закріплені магнітні полюсні елементи 30 системи збудження машини, які переважно виконані із декількох окремих елементарних постійних магнітів, намагнічених у радіальному напрямку. Машина може бути виконана із кількістю пар магнітних полюсів (р) від одної до шести. Оптимальним є виконання машини із двома-трьома (краще двома, як показано на фіг. 6, 7) парами магнітних полюсів, виходячи із того, що, по-перше, частота обертання робочого вала 9 машини буде складати 1500 чи 750 обертів за хвилину (при частоті змінного струму 50 Гц), що прийнятне з погляду достатності міцності застосованих магнітів та їх кріплення у роторі. По-друге, при цьому довжина магнітопроводу кожної окремої замкнутої магнітної системи машини достатньо мала, особливо, коли перший (зовнішній) статор 4 та/або другий (внутрішній) статор 7 мають неявно полюсну конструкцію. Відомо, що магнітні властивості постійних магнітів мають певну нестабільність і можуть змінюватись від одної партії до іншої, змінюватись із часом, під впливом коливань температури, зовнішніх магнітних полів, інших елементів магнітного ланцюга. Тому наявність у машині простої і надійної системи регулювання ЕРС є надзвичайно важливою умовою її успішного промислового використання. Однією із найважливіших корисних властивостей запропонованої конструкції синхронної магнітоелектричної машини е її пристосованість для реалізації відносно простого і ефективного метода регулювання ЕРС. Суть цього методу полягає в тому, що ЕРС машини, у якої робочі якірні обмотки 5, 8 першого (зовнішнього) 4 та другого (внутрішнього) 7 статорів з'єднані послідовно, змінюють, змінюючи кутове положення один відносно одного зовнішнього і внутрішнього статорів. Загальновідомо, що ЕРС у ланцюзі змінного струму складують, як вектори. На фіг. 2 показана векторна діаграма де вектори ОА та АВ позначають ЕРС «Eo5» та «Eo8», які індукуються у якірних обмотках відпо 42715 10 відно 5, 8 першого (зовнішнього) 4 та другого (внутрішнього) 7 статорів магнітним потоком збудження Фо, що створений МРС Fo магнітних полюсних елементів 30 у робочих повітряних зазорах 31, 32 відповідно між магнітними полюсами ротора 10 і зовнішнім 4 та внутрішнім 7 статорами. Ці ЕРС по фазі відстають від магнітного потоку збудження «Фо» на кут у 90 електричних градусів. Якщо зовнішній 4 та внутрішній 7 статори зміщені один відносно іншого на певний електричний кут «aел» (тобто кут у електричних градусах), то на той же кут зміщені вектори магнітного потоку «Фо64» та «Фо65» у відповідному зазорі 31, 32 і відповідно на той же електричний кут «aел» зміщені один відносно іншого вектори ЕРС «Ео5» та «Eo8» відповідно у першій 5 та другій частинах робочої якірної обмотки машини. Таким чином, при куті aел = 0 електричних градусів, вектори «Eo5» та «Eo8» мають один напрямок і їх скалярні величини складуються, при цьому сумарна ЕРС «Ео» у якірній обмотці машини є максимальною і визначається із формули: Еomax = Eo5 + Eo8. При куті aел = 180 електричних градусів, вектори «Eo5» та «Ео8» мають протилежні напрямки і їх скалярні величини віднімаються одна від одної, при цьому сумарна ЕРС «Ео» у якірній обмотці машини є мінімальною і визначається із формули: Еоmin = Eo5 – Eo8. При зміні кута aел від 0 до 180 або від 360 до 180 електричних градусів сумарна ЕРС «Ео» у якірній обмотці машини буде змінюватись від максимального значення Еomах = Eo5 + Eo8 до мінімального значення Еomin = Eo5 – Ео8. При будь-яких значеннях кута aел ЕРС машини можна визначити графічно на фіг. 2 векторами OВ, ОВ1¸ОВ11. Причому друга частина робочої якірної обмотки 8, що виконана на другому статорі 7, пристосована для генерування електрорушійної сили Ео8, яка становить 20¸70 % від електрорушійної сили Eos, яка генерується першою частиною робочої якірної обмотки 5, що виконана на першому статорі 4. Електричний кут «aел» зв'язаний із відповідним геометричним кутом «a» математичною залежністю: aел = a * p, де: р - кількість пар полюсів на один статор. Таким чином, наприклад, вже при р = 2 геометричний кут «a» повороту одного із статорів 4, 7 відносно іншого статора для регулювання ЕРС є досить незначним, що не викличе істотних проблем із практичною реалізацією такого методу регулювання ЕРС. Виходячи із вищезазначеного система регулювання електрорушійної сили машини пристосована для можливості розміщення першого та другого статорів під геометричним кутом (a) один до одного, який може змінюватись. У найпростішому випадку, коли машинагенератор призначена для використання при стабільному значенні навантаження досить у процесі випробувань встановити статори 4, 7 під необхідним углом «a», встановлюючи вісь 6, задню криш 11 ку 3 чи безпосередньо внутрішній статор 7 у необхідному фіксованому кутовому положенні. Тобто у цьому випадку система регулювання електрорушійної сили пристосована для фіксації першого (зовнішнього) та другого (внутрішнього) статорів один відносно іншого в одному із декількох можливих кутових положень. У одному із виконань другий (внутрішній) статор 7 жорстко закріплений на осі 6, задній кінець 26 якої в одному із декількох можливих кутових положень нерухомо зафіксований у отворі ступиці 27 задньої кришки 3 будь-яким придатним для цього відомим способом (фіг. 1). Наприклад, так як прийнято кріпити конічні хвостовики інструментів у конічних отворах чи за допомогою шліців, чи цангового затискача, чи фланця із продовгуватими дугоподібними отворами для кріпильних болтів тощо. У іншому виконанні задній кінець 26 осі 6 нерухомо зафіксований у отворі ступиці 27 задньої кришки 3 тільки в одному кутовому положенні, а задня кришки 3 одним із відомих способів нерухомо прикріплена до корпусу 1 в одному із декількох можливих кутових положень. Наприклад, так як це вище зазначено для фланця із продовгуватими дугоподібними отворами для кріпильних болтів. У іншому виконанні задній кінець 26 пропущений назовні корпусу 1 через отвір ступиці 27 задньої кришки 3 із можливістю повороту. При цьому, розташований назовні корпуса 1 задній кінець 26 осі 6 зв'язаний із системою регулювання електрорушійної сили, яка пристосована для повороту осі 6 і відповідно першого 4 та другого 7 статорів один відносно іншого залежно від зміни визначеного параметру роботи машини та фіксації статорів 4, 7 один відносно іншого при стабільному визначеному параметрі. Критично важливим, є тільки можливість встановлення першого (зовнішнього) 4 та другого (внутрішнього) 7 статорів у декількох кутових положеннях один відносно одного, тому фахівець може легко створити також інші варіанти виконань, зокрема таке, у якому задня кришка 3 пристосована для можливості повороту відносно корпусу 1 і зв'язана із системою регулювання ЕРС машини. У іншому випадку другий (внутрішній) статор 7 може бути пристосований для встановлення на осі 6 у декількох фіксованих кутових положеннях або пристосований для можливості повороту відносно осі 6 і зв'язаний із системою регулювання ЕРС. Наприклад, у випадку, коли машина-генератор призначена для використання при відносно нестабільному значенні навантаження (тобто струму «/»), але при відносно стабільному cos j навантаження, то застосовують надзвичайно просту і надійну механічну систему регулювання ЕРС 33 машини-генератора, яка представлена на фіг. 3. Ця система 33 включає в себе виконаний, наприклад, із пружинної стальної смуги, пружинний важіль 34 (пружинний елемент), перший кінець якого жорстко прикріплений до заднього кінця 39 осі 6, а другий кінець - розташований у зазорі між упорами 35, які встановлені у напрямній 36 кронштейна 37. Упори 35 пристосовані для переміщення у напрямній 36 у радіальному напрямку, позначеному стрілкою 38, і встановлення у декількох фіксова 42715 12 них (за допомогою гвинтів-фіксаторів 39) положеннях. Кронштейн 37 пристосований для переміщення у тангенціальному напрямку, позначеному стрілкою 40, і встановлення у декількох фіксованих (за допомогою гвинтів-фіксаторів 41) положеннях, наприклад, на зовнішній циліндричній поверхні корпуса 1. Причому, другий (внутрішній) статор 7 у початковому положенні системи 33 зміщений відносно зовнішнього статора 4 у напрямку проти напрямку обертання ротора 10, позначеному стрілкою 42, на певний початковий кут «a». У іншому випадку, коли машина-генератор призначена для використання при відносно нестабільному значенні навантаження і при не стабільному cos j навантаження, то застосовують досить просту і надійну електромеханічну систему регулювання ЕРС 43 машини-генератора, яка представлена на фіг. 4. Ця система 43 включає в себе черв'ячне колесо 44, яке жорстко закріплено на задньому кінці 39 осі 6 і зчеплене із черв'яком 45, жорстко встановленим на валі 46, який зв'язаний із активним електромеханічним приводом 47, виконаним у вигляді електродвигуна чи моторредуктора відносно невеликої потужності. Важливим, є те щоб черв'ячна передача була виконана само гальмівною. Це дозволяє не застосовувати окремого гальма для гальмування осі 6, оскільки поворот осі 6 моментом, який діє на внутрішній статор 7 від ротора, унеможливлюється черв'ячною передачею. Очевидно, що замість черв'ячної передачі можна використати інші само гальмівні передачі, наприклад, гвинтову передачу. Електромеханічним приводом 47 керує, наприклад, електронна система керування пристосована реагування на відхилення напруги на електричних затискачах машини-генератора чи іншого визначеного параметру роботи машини (наприклад, обертаючого моменту машини-двигуна) від встановленого значення шляхом включення приводу 47 на обертання його вихідного валу і відповідно обертання черв'ячного колеса 44 та осі 6 із внутрішнім статором 7 у напрямку (позначеному стрілкою 48), який потрібен для відповідного коригування кута «a» між внутрішнім 7 і зовнішнім 4 статорами для відновлення встановленого значення напруги машини-генератора чи іншого визначеного параметру роботи машини, наприклад обертаючого моменту машини-двигуна. Спосіб використання запропонованої синхронної машини, наприклад, як генератора чи двигуна очевидний із наведеного вище опису. Що стосується функціонування механічної системи регулювання ЕРС 33 за фіг. 3, то вона працює таким чином. У процесі випробувань машинигенератора кронштейн 37 встановлюють таким, чином щоб забезпечити певний початковий кут «а», при якому у режимі холостого ходу напруга на електричних затискачах генератора відповідає заданій. Встановлюючи упори 35 на різній відстані у радіальному напрямку 38 від осі 6, досягають необхідної регулювальної характеристики системи 33, тобто необхідної залежності між кутом повороту осі 6 і величиною моменту «М», який діє на внутрішній статор 7 з боку ротора 10. Оскільки зазначений момент «М» пропорційний активній 13 42715 складовій «Іа» струму «І» у якорній обмотці 5, 8 машини, то відповідно із збільшенням навантаження внутрішній ротор під дією збільшеного моменту повернеться у напрямку стрілки 40 на більший кут, пересилюючи спротив пружинного важеля 34. При цьому, геометричний «a» і відповідно електричний кут «aел» між внутрішнім 7 і зовнішнім 4 статорами зменшиться, а сумарна ЕРС «Ео» збільшиться, що компенсує падіння напруги всередині генератора та зменшення ЕРС внаслідок розмагнічуючої дії реакції якоря і стабілізує напругу на затискачах генератора. При необхідності, механічна система регулювання ЕРС 33 може бути скомбінована із електри Комп’ютерна верстка І.Скворцова 14 чною системою, яка включає в себе батареї конденсаторів, які контактним або тиристорним пристроєм автоматично включаються паралельно якірній обмотці для компенсації реактивної складової струму навантаження. Така комбінована система може бути альтернативою електромеханічній системі регулювання ЕРС 43 за фіг. 4. Джерела інформації: 1. Потоцкий К.В. Электрические машины и основы электропривода. М.: Изд-во «Колос», 1964. 2. Вольдек А.И. Электрические машины. Учебник для студентов высш. техн. учебн. заведений. Изд 2-е, перераб. и доп. Л., «Энергия», 1974. 3. SU 1136265 А, МПК: Н02К 21/16, 23.01.1985. Підписне Тираж 28 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSynchronous magnetoelectric machine
Автори англійськоюPalyvoda Kostiantyn Vitaliiovych
Назва патенту російськоюСинхронная магнитоэлектрическая машина
Автори російськоюПаливода Костантин Витальевич
МПК / Мітки
МПК: H02K 21/00
Мітки: магнітоелектрична, машина, синхронна
Код посилання
<a href="https://ua.patents.su/7-42715-sinkhronna-magnitoelektrichna-mashina.html" target="_blank" rel="follow" title="База патентів України">Синхронна магнітоелектрична машина</a>
Синхронна магнітоелектрична машина

Номер патенту: 41941
Опубліковано: 10.06.2009
Автор: Паливода Костянтин Віталійович
МПК: H02K 21/00
Мітки: машина, магнітоелектрична, синхронна
Формула / Реферат:
1. Синхронна магнітоелектрична машина, яка включає в себе корпус із передньою і задньою кришками, встановлений у корпусі зовнішній статор із першою частиною робочої якірної обмотки, робочий вал машини, який пропущений через передню кришку корпуса, змонтований на робочому ашини порожнистий ротор із вмонтованими у стінку його циліндричної порожнистої частини магнітними полюсними елементами системи збудження машини, виконаними на основі...
Безконтактна електрична синхронна машина з дисковим ротором
Номер патенту: 77732
Опубліковано: 15.01.2007
Автори: Яковлев Олександр Володимирович, Булгар Віктор Васильович, Гололобов Володимир Васильович, Івлєв Анатолій Дмитрович
МПК: H02K 21/00
Мітки: машина, дисковим, синхронна, електрична, безконтактна, ротором
Формула / Реферат:
Безконтактна електрична синхронна машина з дисковим ротором, що містить корпус, статор з радіальними пазами для укладання обмотки якоря, тороїдальну обмотку збудження і нерухомий магнітопровід, яка відрізняється тим, що нерухомий магнітопровід виконано у вигляді зовнішньої і внутрішньої феромагнітних циліндричних труб з полюсними наконечниками, закріплених на спільній феромагнітній основі, між якими розташована тороїдальна обмотка збудження,...
Безконтактна синхронна електрична машина

Номер патенту: 38330
Опубліковано: 15.05.2001
Автори: Якимчук Георгій Сергійович, Клементьєв Олександр Валентинович, Китаєв Олександр Васильович
МПК: H02K 19/16
Мітки: електрична, машина, безконтактна, синхронна
Текст:
...і 6 наводиться ЕРС, під впливом яких в замкнути х контурах тече стр ум, випрямлений діодами 9, 10, 11. Постійна складова струму є струмом збудження машини, що створює її основне магнітне поле, яке необхідне для наведення трифазної системи ЕРС в обмотці якоря 1 з частотою f. Однак, випрямлений струм крім постійної складової має вищі гармоніки, з яких визначальну роль грає основна. Вона створює магнітне поле полюсністю 2р, яке індукує в...
Безконтактна синхронна електрична машина
Номер патенту: 68582
Опубліковано: 16.08.2004
Автори: Китаєв Олександр Васильович, Климентьєв Олександр Валентинович, Якимчук Георгій Сергійович
МПК: H02K 19/16
Мітки: синхронна, машина, електрична, безконтактна
Формула / Реферат:
Безконтактна синхронна електрична машина, що містить на статорі якірну обмотку й обмотку збудження збудника, а на роторі - систему збудження, виконану щонайменше з двох обмоток, з'єднаних між собою електрично, кожна з яких включає щонайменше дві частини, з'єднані між собою через перемикаючий пристрій з можливістю їх вмикання послідовно чи паралельно, при цьому однойменні затискачі частин обмоток системи збудження, що не мають зв'язку з...
Безконтактна синхронна електрична машина

Номер патенту: 50195
Опубліковано: 15.10.2002
Автори: Клементьєв Олександр Валентинович, Олейников Олександр Михайлович, Якимчук Георгій Сергійович, Китаєв Олександр Васильович
МПК: H02K 19/16
Мітки: машина, синхронна, електрична, безконтактна
Формула / Реферат:
Безконтактна синхронна електрична машина, що містить на статорі якірну обмотку й обмотку збудження збудника, а на роторі - систему збудження, виконану щонайменше з двох обмоток, з'єднаних між собою електрично, кожна з яких включає щонайменше дві частини, з'єднані між собою через перемикальний пристрій з можливістю їх вмикання послідовно або паралельно, при цьому однойменні затискачі частин обмоток системи збудження, що не мають зв'язку з...
Попередній патент: Закупорювальний пристрій мтр-2/1
Наступний патент: Спосіб лікування дрібного переддвер’я рота
Випадковий патент: Корпус газотубінного двигуна