Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини
Номер патенту: 49720
Опубліковано: 16.09.2002
Формула / Реферат
Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини, що містить основу, на якій встановлений двокоординатний електричний привід горизонтальних переміщень та обертів з опорною платформою трьох розташованих симетрично по колу механізмів вертикального підйому, на кінцевих опорних вузлах яких шарнірно закріплена верхня площадка з кабіною, в якій знаходиться місце оператора, який відрізняється тим, що на шляховій структурі вказаного приводу розташовані з можливістю руху вздовж неї три активні модулі з якірними обмотками керування та магнітоелектричним збудженням, кожний з яких несе горизонтальну поворотну опорну площадку з хитними опорами , в яких розташовано жорсткий трипроменевий стрижень, а кожний механізм вертикального підйому містить нерухомий циліндричний модуль та рухому шляхову структуру лінійного двигуна жорстко з'єднану з штоком поршня горизонтально розташованого гідравлічного циліндра та муфти, яка з'єднує вказаний циліндр з вертикально розташованим циліндром більшого діаметра, в якому пересувається поршень зі штоком вертикального підйому.
Текст
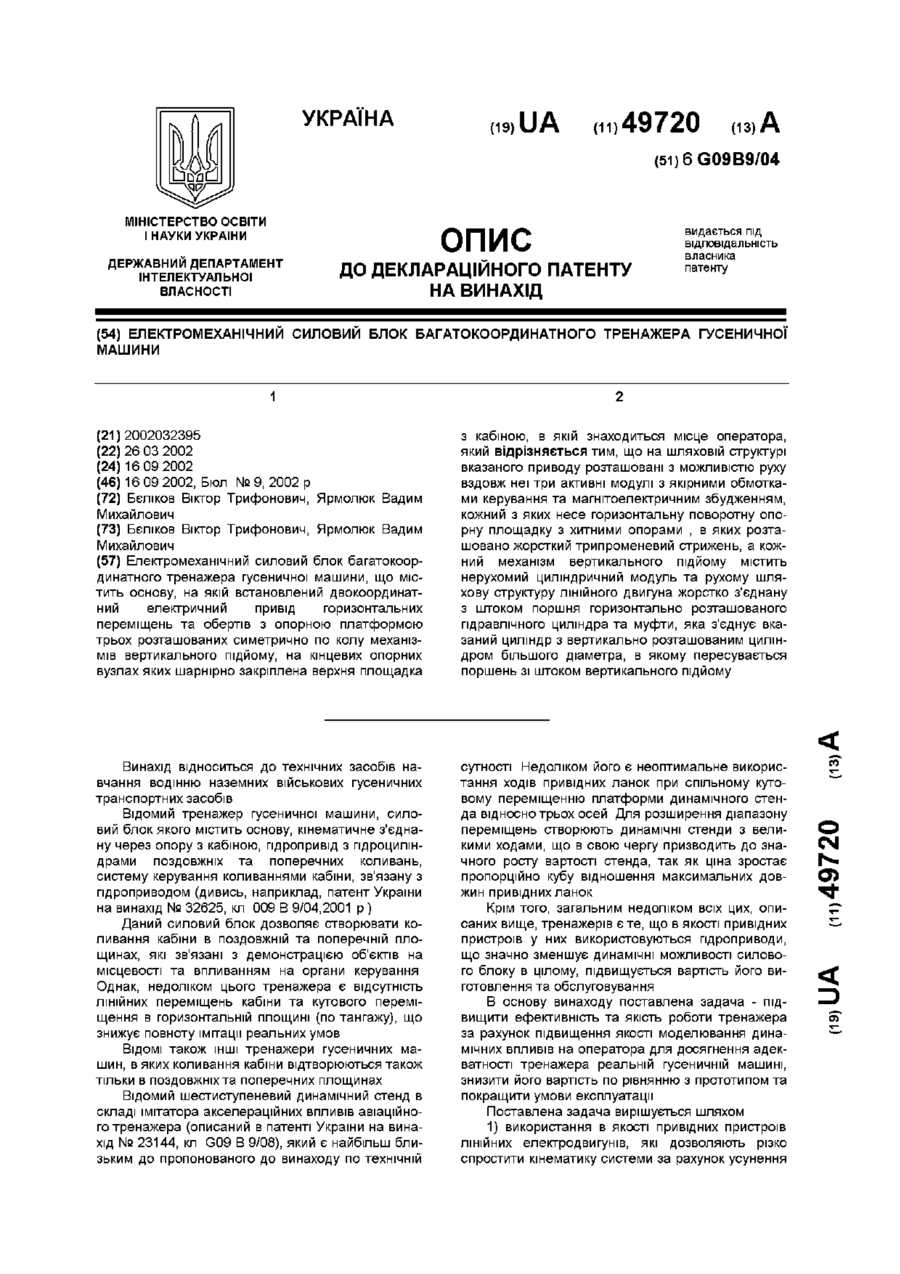
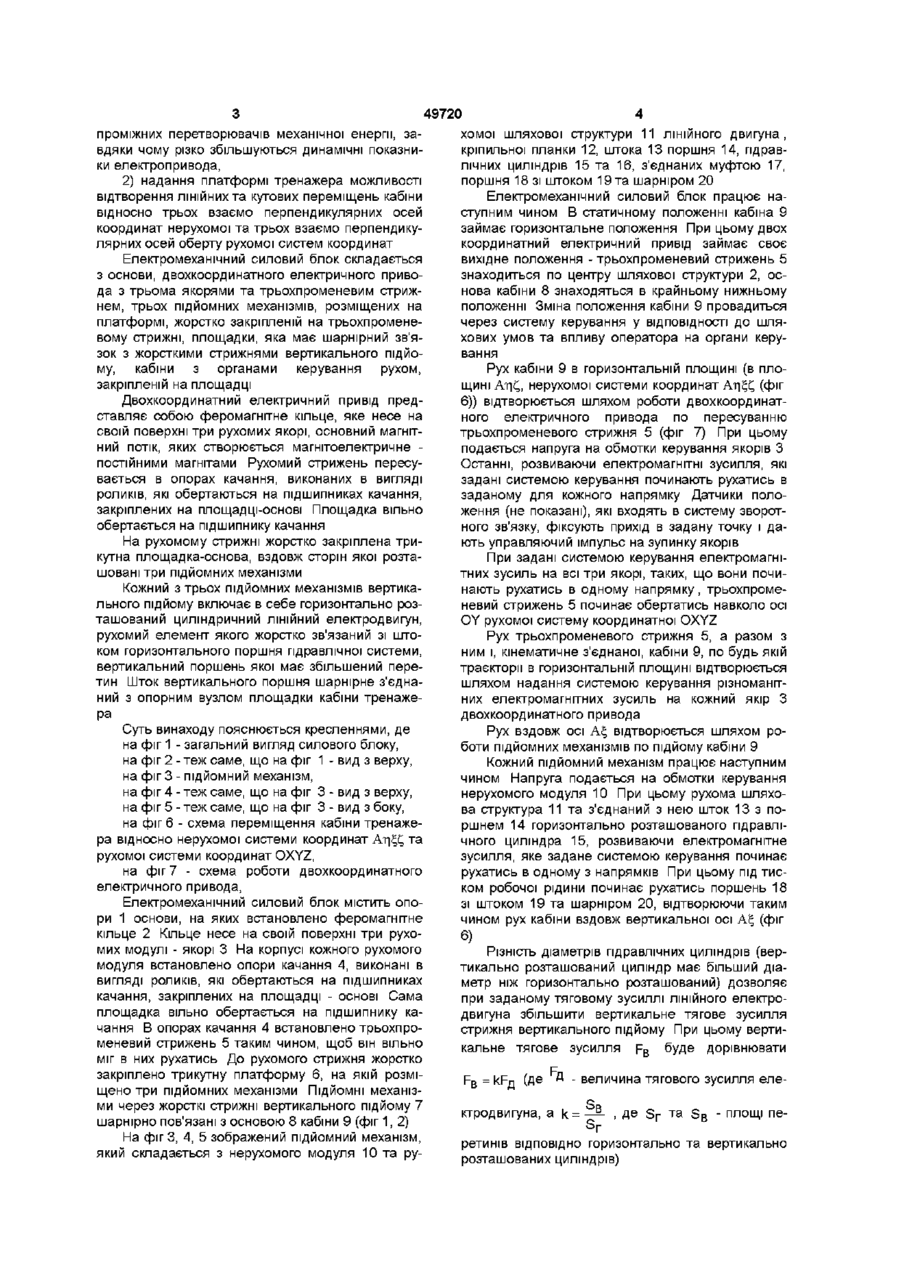
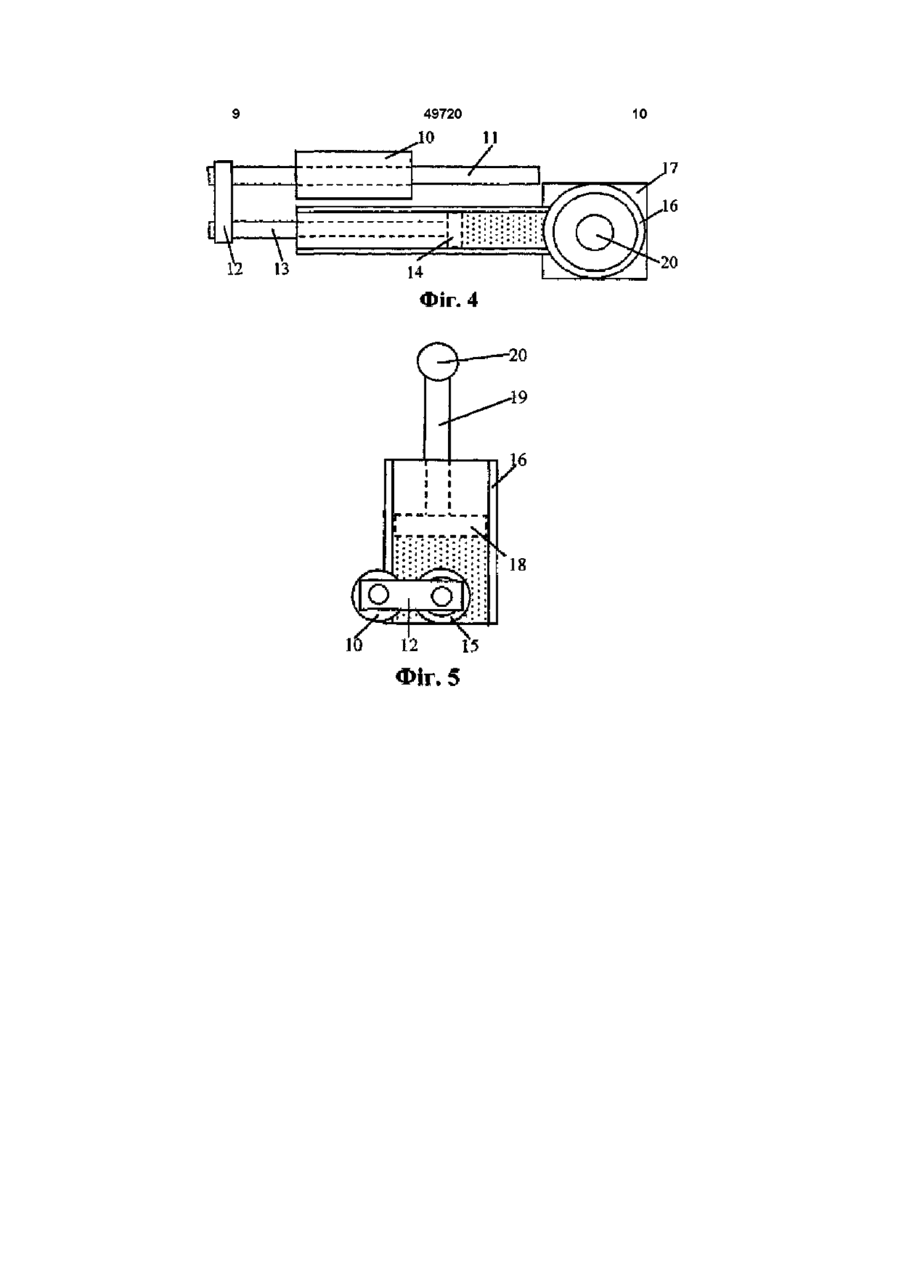
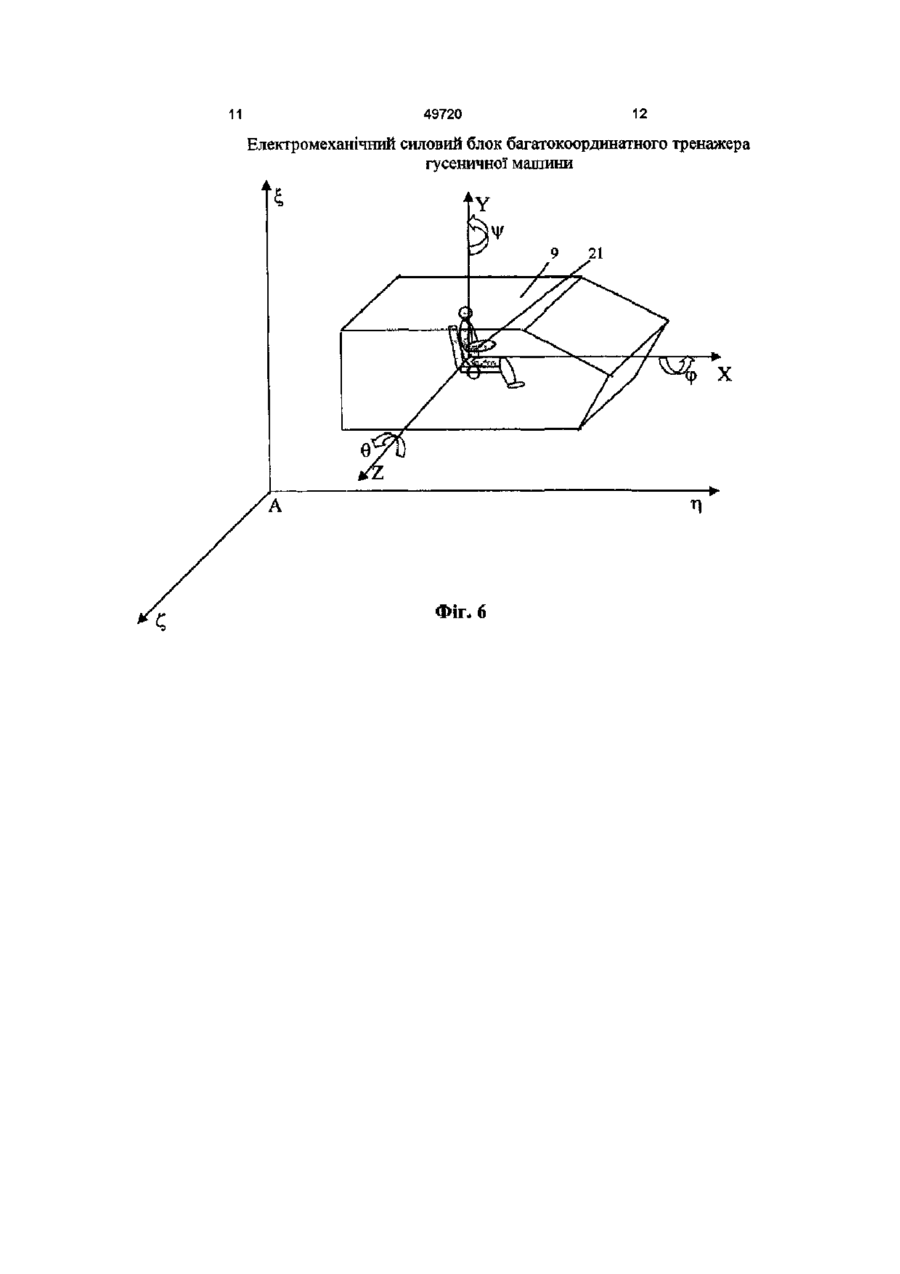
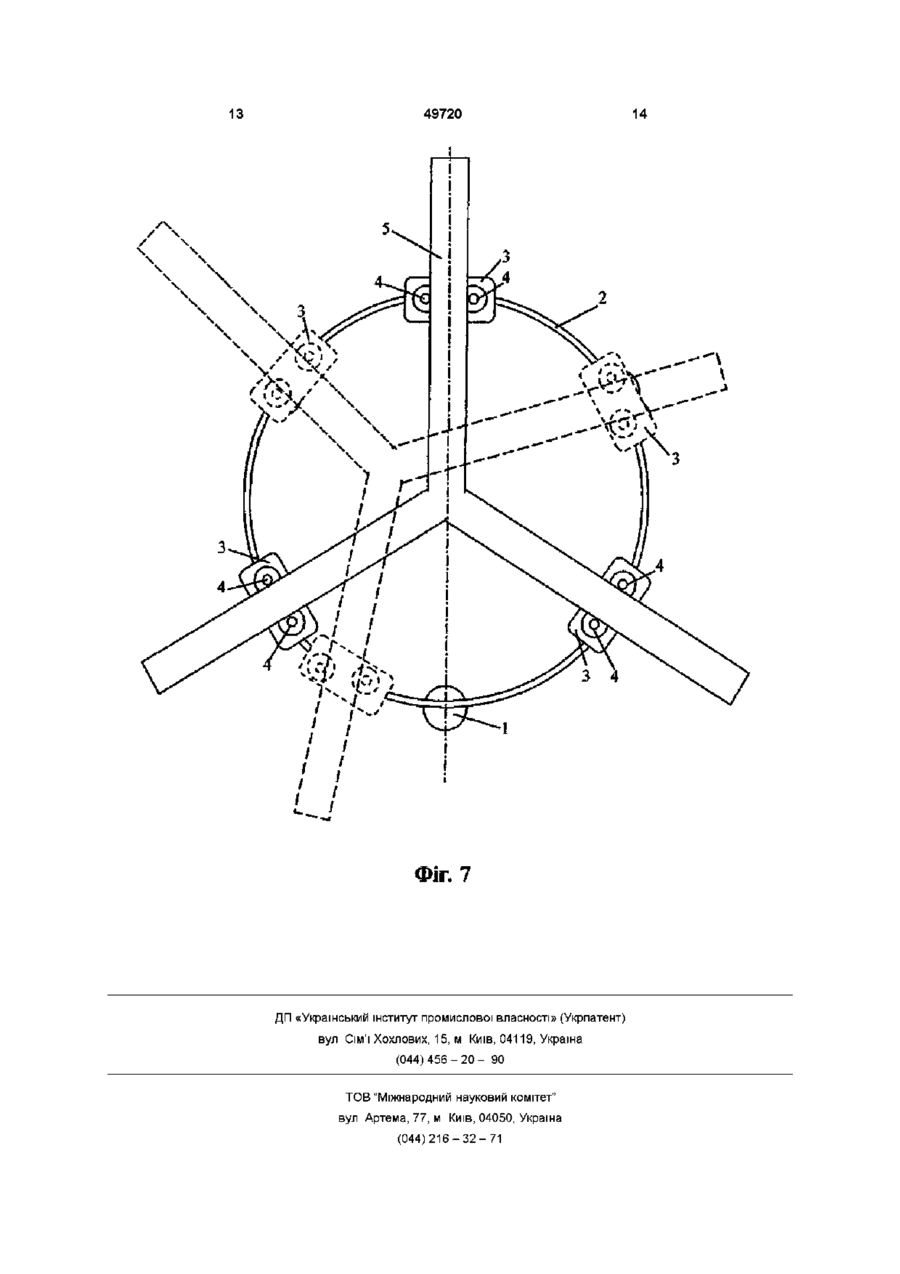
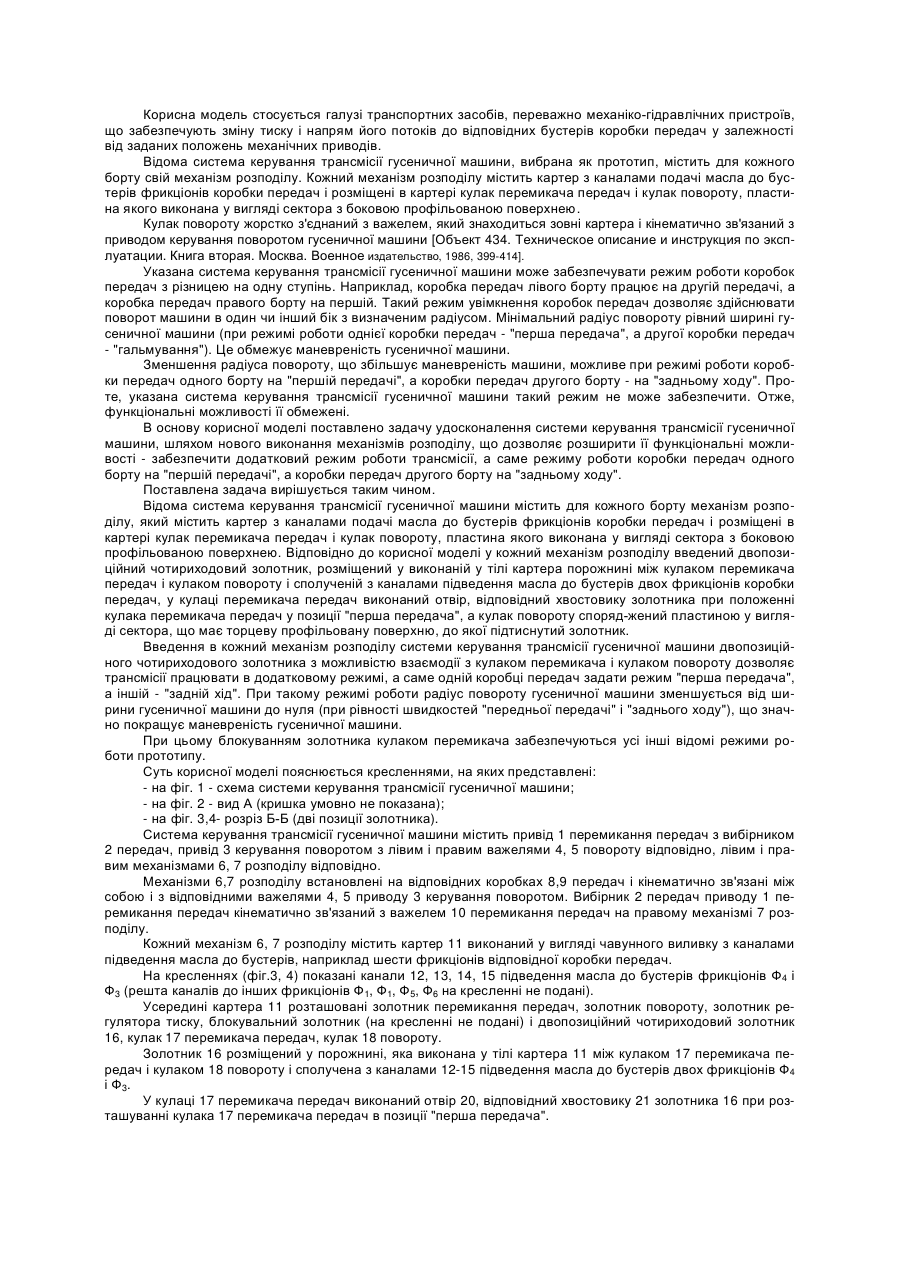
Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини, що містить основу, на якій встановлений двокоординатний електричний привід горизонтальних переміщень та обертів з опорною платформою трьох розташованих симетрично по колу механізмів вертикального підйому, на кінцевих опорних вузлах яких шарнірно закріплена верхня площадка з кабіною, в якій знаходиться місце оператора, який відрізняється тим, що на шляховій структурі вказаного приводу розташовані з можливістю руху вздовж неї три активні модулі з якірними обмотками керування та магнітоелектричним збудженням, кожний з яких несе горизонтальну поворотну опорну площадку з хитними опорами , в яких розташовано жорсткий трипроменевий стрижень, а кожний механізм вертикального підйому містить нерухомий циліндричний модуль та рухому шляхову структуру ЛІНІЙНОГО двигуна жорстко з'єднану з штоком поршня горизонтально розташованого гідравлічного циліндра та муфти, яка з'єднує вказаний циліндр з вертикально розташованим циліндром більшого діаметра, в якому пересувається поршень зі штоком вертикального підйому Винахід відноситься до технічних засобів навчання водінню наземних військових гусеничних транспортних засобів Відомий тренажер гусеничної машини, силовий блок якого містить основу, кінематичне з'єднану через опору з кабіною, пдропривід з гідроциліндрами поздовжніх та поперечних коливань, систему керування коливаннями кабіни, зв'язану з пдроприводом (дивись, наприклад, патент України на винахід № 32625, кл 009 В 9/04,2001 р ) Даний силовий блок дозволяє створювати коливання кабіни в поздовжній та поперечній площинах, які зв'язані з демонстрацією об'єктів на місцевості та впливанням на органи керування Однак, недоліком цього тренажера є відсутність ЛІНІЙНИХ переміщень кабіни та кутового переміщення в горизонтальній площині (по тангажу), що знижує повноту імітації реальних умов сутності Недоліком його є неоптимальне використання ходів привідних ланок при спільному кутовому переміщенню платформи динамічного стенда відносно трьох осей Для розширення діапазону переміщень створюють динамічні стенди з великими ходами, що в свою чергу призводить до значного росту вартості стенда, так як ціна зростає пропорційно кубу відношення максимальних довжин привідних ланок Крім того, загальним недоліком всіх цих, описаних вище, тренажерів є те, що в якості привідних пристроїв у них використовуються пдроприводи, що значно зменшує динамічні можливості силового блоку в цілому, підвищується вартість його виготовлення та обслуговування В основу винаходу поставлена задача - підвищити ефективність та якість роботи тренажера за рахунок підвищення якості моделювання динамічних впливів на оператора для досягнення адекватності тренажера реальній гусеничній машині, знизити його вартість по рівнянню з прототипом та покращити умови експлуатації Поставлена задача вирішується шляхом 1) використання в якості привідних пристроїв ЛІНІЙНИХ електродвигунів, які дозволяють різко спростити кінематику системи за рахунок усунення ВІДОМІ також ІНШІ тренажери гусеничних ма шин, в яких коливання кабіни відтворюються також тільки в поздовжніх та поперечних площинах Відомий шестиступеневий динамічний стенд в складі імітатора акселераційних впливів авіаційного тренажера (описаний в патенті України на винахід № 23144, кл G09 В 9/08), який є найбільш близьким до пропонованого до винаходу по технічній О 49720 проміжних перетворювачів механічної енергії, завдяки чому різко збільшуються динамічні показники електропривода, 2) надання платформі тренажера можливості відтворення ЛІНІЙНИХ та кутових переміщень кабіни відносно трьох взаємо перпендикулярних осей координат нерухомої та трьох взаємо перпендикулярних осей оберту рухомої систем координат Електромеханічний силовий блок складається з основи, двохкоординатного електричного привода з трьома якорями та трьохпроменевим стрижнем, трьох підйомних механізмів, розміщених на платформі, жорстко закріпленій на трьохпроменевому стрижні, площадки, яка має шарнірний зв'язок з жорсткими стрижнями вертикального підйому, кабіни з органами керування рухом, закріпленій на площадці Двохкоординатний електричний привід представляє собою феромагнітне кільце, яке несе на своїй поверхні три рухомих якорі, основний магнітний потік, яких створюється магнітоелектричне постійними магнітами Рухомий стрижень пересувається в опорах качання, виконаних в вигляді роликів, які обертаються на підшипниках качання, закріплених на площадці-основі Площадка вільно обертається на підшипнику качання На рухомому стрижні жорстко закріплена трикутна площадка-основа, вздовж сторін якої розташовані три підйомних механізми Кожний з трьох підйомних механізмів вертикального підйому включає в себе горизонтально розташований циліндричний ЛІНІЙНИЙ електродвигун, рухомий елемент якого жорстко зв'язаний зі штоком горизонтального поршня гідравлічної системи, вертикальний поршень якої має збільшений перетин Шток вертикального поршня шарнірне з'єднаний з опорним вузлом площадки кабіни тренажера Суть винаходу пояснюється кресленнями, де на фіг 1 - загальний вигляд силового блоку, на фіг 2 - теж саме, що на фіг 1 - вид з верху, на фіг 3 - підйомний механізм, на фіг 4 - теж саме, що на фіг 3 - вид з верху, на фіг 5 - теж саме, що на фіг 3 - вид з боку, на фіг 6 - схема переміщення кабіни тренажера відносно нерухомої системи координат Ат|4С т а рухомої системи координат OXYZ, на фіг 7 - схема роботи двохкоординатного електричного привода, Електромеханічний силовий блок містить опори 1 основи, на яких встановлено феромагнітне кільце 2 Кільце несе на своїй поверхні три рухомих модулі - якорі 3 На корпусі кожного рухомого модуля встановлено опори качання 4, виконані в вигляді роликів, які обертаються на підшипниках качання, закріплених на площадці - основі Сама площадка вільно обертається на підшипнику качання В опорах качання 4 встановлено трьохпроменевий стрижень 5 таким чином, щоб він вільно міг в них рухатись До рухомого стрижня жорстко закріплено трикутну платформу 6, на якій розміщено три підйомних механізми ПІДЙОМНІ механізми через жорсткі стрижні вертикального підйому 7 шарнірно пов'язані з основою 8 кабіни 9 (фіг 1, 2) На фіг 3, 4, 5 зображений підйомний механізм, який складається з нерухомого модуля 10 та ру хомої шляхової структури 11 ЛІНІЙНОГО двигуна, кріпильної планки 12, штока 13 поршня 14, гідравлічних циліндрів 15 та 16, з'єднаних муфтою 17, поршня 18 зі штоком 19 та шарніром 20 Електромеханічний силовий блок працює наступним чином В статичному положенні кабіна 9 займає горизонтальне положення При цьому двох координатний електричний привід займає своє вихідне положення - трьохпроменевий стрижень 5 знаходиться по центру шляхової структури 2, основа кабіни 8 знаходяться в крайньому нижньому положенні Зміна положення кабіни 9 провадиться через систему керування у ВІДПОВІДНОСТІ ДО ШЛЯХОВИХ умов та впливу оператора на органи керування Рух кабіни 9 в горизонтальній площині (в площині Ат|С, нерухомої системи координат Ат|4С (Ф | Г 6)) відтворюється шляхом роботи двохкоординатного електричного привода по пересуванню трьохпроменевого стрижня 5 (фіг 7) При цьому подається напруга на обмотки керування якорів З Останні, розвиваючи електромагнітні зусилля, які задані системою керування починають рухатись в заданому для кожного напрямку Датчики положення (не показані), які входять в систему зворотного зв'язку, фіксують прихід в задану точку і дають управляючий імпульс на зупинку якорів При задані системою керування електромагнітних зусиль на всі три якорі, таких, що вони починають рухатись в одному напрямку, трьохпроменевий стрижень 5 починає обертатись навколо осі OY рухомої систему координатної OXYZ Рух трьохпроменевого стрижня 5, а разом з ним і, кінематичне з'єднаної, кабіни 9, по будь якій траєкторії в горизонтальній площині відтворюється шляхом надання системою керування різноманітних електромагнітних зусиль на кожний якір З двохкоординатного привода Рух вздовж осі АЕ, відтворюється шляхом роботи підйомних механізмів по підйому кабіни 9 Кожний підйомний механізм працює наступним чином Напруга подається на обмотки керування нерухомого модуля 10 При цьому рухома шляхова структура 11 та з'єднаний з нею шток 13 з поршнем 14 горизонтально розташованого гідравлічного циліндра 15, розвиваючи електромагнітне зусилля, яке задане системою керування починає рухатись в одному з напрямків При цьому під тиском робочої рідини починає рухатись поршень 18 зі штоком 19 та шарніром 20, відтворюючи таким чином рух кабіни вздовж вертикальної осі АЕ, (фіг 6) РІЗНІСТЬ діаметрів гідравлічних циліндрів (вертикально розташований циліндр має більший діаметр ніж горизонтально розташований) дозволяє при заданому тяговому зусиллі ЛІНІЙНОГО електродвигуна збільшити вертикальне тягове зусилля стрижня вертикального підйому При цьому вертикальне тягове зусилля FR буде дорівнювати FB = kFn (Д е Д - величина тягового зусилля елеSR ктродвигуна, a k = —— , де Sp та SR - площі пеs rретинів ВІДПОВІДНО горизонтально та вертикально розташованих циліндрів) 49720 Повздовжні та поперечні коливання кабіни 9 (кути ф та Є) відтворюються шляхом автоматичної зміни параметрів роботи кожного підйомного механізму Таким чином кінематична схема рухомої кабіни 9 забезпечує можливість руху и вздовж осей нерухомої системи координат Аті^С т а одночасного оберту и навколо осей рухомої системи координат Ат|4С (Ф | Г 6) Поступовий рух кабіни 9, в якій знаходиться оператор 21, відносно нерухомої системи координат Ат|4С забезпечується роботою двохкоординатного електричного приводу по пе реміщенню трьохпроменевого стрижня 5 в горизонтальній площині (по осям ті та Q та одночасною роботою підйомних механізмів по підйому та спуску кабіни 9 (рух по осі Q Сферичний рух кабіни 9 відносно рухомої системи координат OXYZ забезпечується роботою двохкоординатного електричного привода по оберту трьохпроменевого стрижня 5 навколо осі OY (кут \\і) та роботою підйомних механізмів залежно з сигналами системи керування по оберту навколо осей ОХ та OZ (кути е та Є) р Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини. ФігЛ 49720 Фіг, 2 •0 2 -9 1 •6 1 •8 1 і \ ГЗ 15 і . 14 Фіг. З 49720 10 2 0 Фіг. 4 18 Фіг. 5 11 49720 12 Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини 4 Фіг* 6 13 49720 Фіг. 7 ДП «Український інститут промислової власності» (Укрпатент) вул Сім'ї Хохлових, 15, м Київ, 04119, Україна ( 0 4 4 ) 4 5 6 - 2 0 - 90 ТОВ "Міжнародний науковий комітет" вул Артема, 77, м Київ, 04050, Україна (044)216-32-71 14
ДивитисяДодаткова інформація
Назва патенту англійськоюPower electromechanical unit of a multicoordinate simulator for training operators of caterpillar vehicles
Автори англійськоюBerlikov Viktor Tryfonovych, Yarmoliuk Vadym Mykhailovych
Назва патенту російськоюСиловой электромаханический блок многокоординатного тренажера для обучения операторов гусеничных машин
Автори російськоюБеликов Виктор Трифонович, Ярмолюк Вадим Михайлович
МПК / Мітки
МПК: G09B 9/04
Мітки: тренажера, силовий, гусеничної, машини, електромеханічний, багатокоординатного, блок
Код посилання
<a href="https://ua.patents.su/7-49720-elektromekhanichnijj-silovijj-blok-bagatokoordinatnogo-trenazhera-gusenichno-mashini.html" target="_blank" rel="follow" title="База патентів України">Електромеханічний силовий блок багатокоординатного тренажера гусеничної машини</a>
Програмно-керований електромеханічний силовий блок тренажерного та терапевтичного обладнання
Номер патенту: 43505
Опубліковано: 17.12.2001
Автори: Васильєв Валерій Валентинович, Потапов Олександр Володимирович, Бєліков Віктор Трифонович, Мозолевич Олександр Миколайович
МПК: A63B 24/00
Мітки: блок, силовий, програмно-керований, електромеханічний, обладнання, тренажерного, терапевтичного
Формула / Реферат:
1. Програмно-керований електромеханічний силовий блок тренажерного та терапевтичного обладнання що містить в собі навантажувальний пристрій, виконаний у вигляді електродвигуна, блок керування навантаженням, датчики зворотного зв'язку і керований перетворювач, котрі підключені до незалежного джерела живлення, який відрізняється тим, що електродвигун, виконаний з розімкненою магнітною системою, має висококоерцитивні постійні магніти, трикутні...
Тренажер гусеничної машини
Номер патенту: 32625
Опубліковано: 15.02.2001
Автори: Магерамов Лютфалій Курбан-Алійович, Гулевський Юрій Володимирович, Борисюк Михайло Дем'янович, Смоляков Василь Андрійович
МПК: G09B 9/04
Мітки: машини, гусеничної, тренажер
Текст:
...упор виконаний у вигляді гідроци ліндра, зв'язаного з пдроприводом CM О ю Винахід стосується технічни х засобів навчання водінню наземних гусеничних транспортних засобів, зокрема, танка Відомий тренажер танка, який містить місток керування для навчаючого з кіноустановкою, сполучений з кабіною з розміщеними у ній органами керування р ухом Перед кабіною розміщений екран Кабіна через опору і кронштейни з'єднана з основою, спорядженою...
Навчально-тренувальний стенд приводів керування гусеничної машини
Номер патенту: 544
Опубліковано: 15.09.2000
Автори: Шкуро Микола Миколайович, Большаков Анатолій Костянтинович, Герасімов Володимир Миколайович, Образцов Володимир Іванович
МПК: G09B 9/04
Мітки: приводів, стенд, гусеничної, керування, машини, навчально-тренувальний
Формула / Реферат:
1. Навчально-тренувальний стенд приводів керування гусеничної машини, що містить імітатор носової частини корпусу, штатні органи керування, виконані у вигляді важелів перемикання передач, ручної подачі палива та повороту, педалей зчеплення, гальма та подачі палива і сидіння для того, кого навчають, розташоване перед органами керування в імітаторі носової частини корпусу, який відрізняється тим, що стенд обладнаний імітатором кормової частини...
Бортова передача гусеничної машини
Номер патенту: 39156
Опубліковано: 15.06.2001
Автори: Борисюк Михайло Дем'янович, Дем'яненко Георгій Олександрович, Магерамов Лютфалій Курбан-Алієвич, Бусяк Юрій Митрофанович, Бершов Олександр Вікторович, Климов Віталій Федорович, Сакун Олексій Андрійович
МПК: B60K 17/00
Мітки: передача, гусеничної, машини, бортова
Формула / Реферат:
Бортова передача гусеничної машини, яка складається із розташованого в корпусі основного планетарного механізму, утримуючого сонячну шестірню, розташовану на вихідному валу коробки передач, епіциклічну шестірню, водило, зв'язаного з вихідним валом, на якому установлено ведуче колесо гусеничного рушія, яка відрізняється тим, що бортова передача обладнана рухомою муфтою управління, зв'язаною за допомогою шліців з корпусом, додатковим...
Система керування трансмісії гусеничної машини
Номер патенту: 791
Опубліковано: 15.03.2001
Автори: Магерамов Лютфалій Курбан-Алієвич, Кудров Володимир Михайлович, Бусяк Юрій Митрофанович, Істратов Анатолій Васильович, Литвин-Попович Ігор Анатолійович, Зімін Дмитро Борисович, Борисюк Михайло Дем'янович
МПК: F16N 25/00, B62D 11/00
Мітки: гусеничної, керування, машини, система, трансмісії
Формула / Реферат:
Система керування трансмісії гусеничної машини, яка включає для кожного борту механізм розподілу, що містить картер з каналами подачі масла до бустерів фрикціонів коробки передач і розміщені в картері кулак перемикача передач і кулак повороту, пластина якого виконана у вигляді сектора з боковою профільованою поверхнею, яка відрізняється тим, що в кожний механізм розподілу введений двопозиційний чотириходовий золотник, розміщений у виконаній у...
Попередній патент: Корпус циклона і спосіб виготовлення корпусу циклона
Наступний патент: Спосіб розробки нафтогазоконденсатного покладу
Випадковий патент: Робочий орган глибокорозпушувача