Програмно-керований електромеханічний силовий блок тренажерного та терапевтичного обладнання
Номер патенту: 43505
Опубліковано: 17.12.2001
Автори: Бєліков Віктор Трифонович, Мозолевич Олександр Миколайович, Васильєв Валерій Валентинович, Потапов Олександр Володимирович




Формула / Реферат
1. Програмно-керований електромеханічний силовий блок тренажерного та терапевтичного обладнання що містить в собі навантажувальний пристрій, виконаний у вигляді електродвигуна, блок керування навантаженням, датчики зворотного зв'язку і керований перетворювач, котрі підключені до незалежного джерела живлення, який відрізняється тим, що електродвигун, виконаний з розімкненою магнітною системою, має висококоерцитивні постійні магніти, трикутні магнітні концентратори потоку та шляхову структуру, яка безпосередньо зв'язана з виконавчим органом обладнання, при цьому незалежне джерело живлення підключене до керованого перетворювача.
2. Програмно-керований електромеханічний силовий блок по п. 1, який відрізняється тим, що електродвигун з розімкненою магнітною системою виконаний у вигляді лінійного електродвигуна з циліндричною шляховою структурою.
3. Програмно-керований електромеханічний силовий блок по п. 1, який відрізняється тим, що електродвигун з розімкненою системою виконаний у вигляді лінійного електродвигуна з прямокутною шляховою структурою.
4. Програмно-керований електромеханічний силовий блок по п. 1, який відрізняється тим, що електродвигун з розімкненою системою виконаний у вигляді електродвигуна з дуговою шляховою структурою.
5. Програмно-керований електромеханічний силовий блок по п. 1, який відрізняється тим, що блок якірних секцій електродвигуна виконаний модульним.
6. Програмно-керований електромеханічний силовий блок по п. 1, який відрізняється тим, що сенсори системи керування розміщені на захватах виконавчого органа обладнання.
7. Програмно-керований електромеханічний силовий блок по п. 6, який відрізняється тим, що блок безперебійного живлення виконаний у вигляді електрохімічного елемента.
8. Програмно-керований електромеханічний силовий блок по п. 6, який відрізняється тим, що блок безперебійного живлення виконаний у вигляді електрогенератора на паливних елементах.
Текст
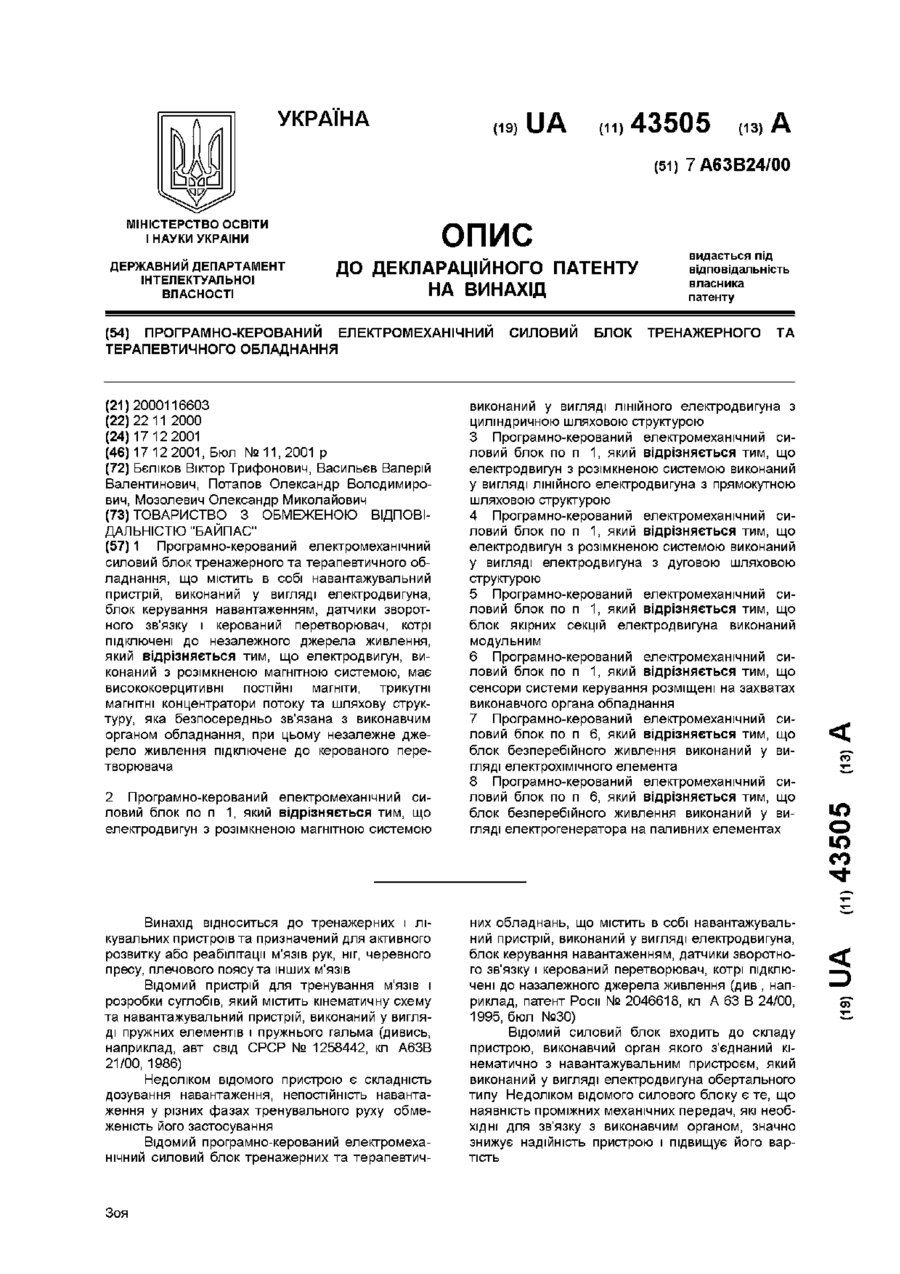
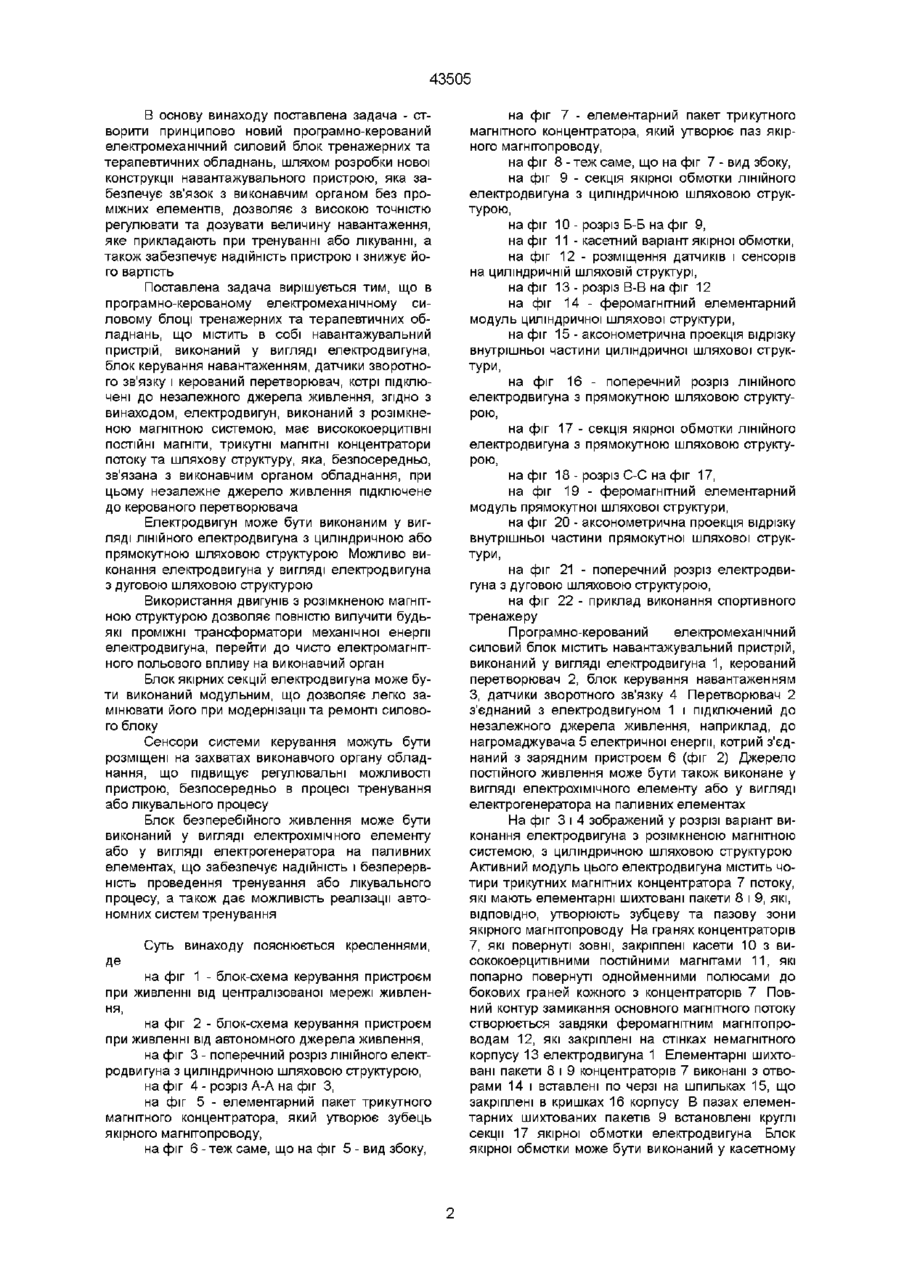
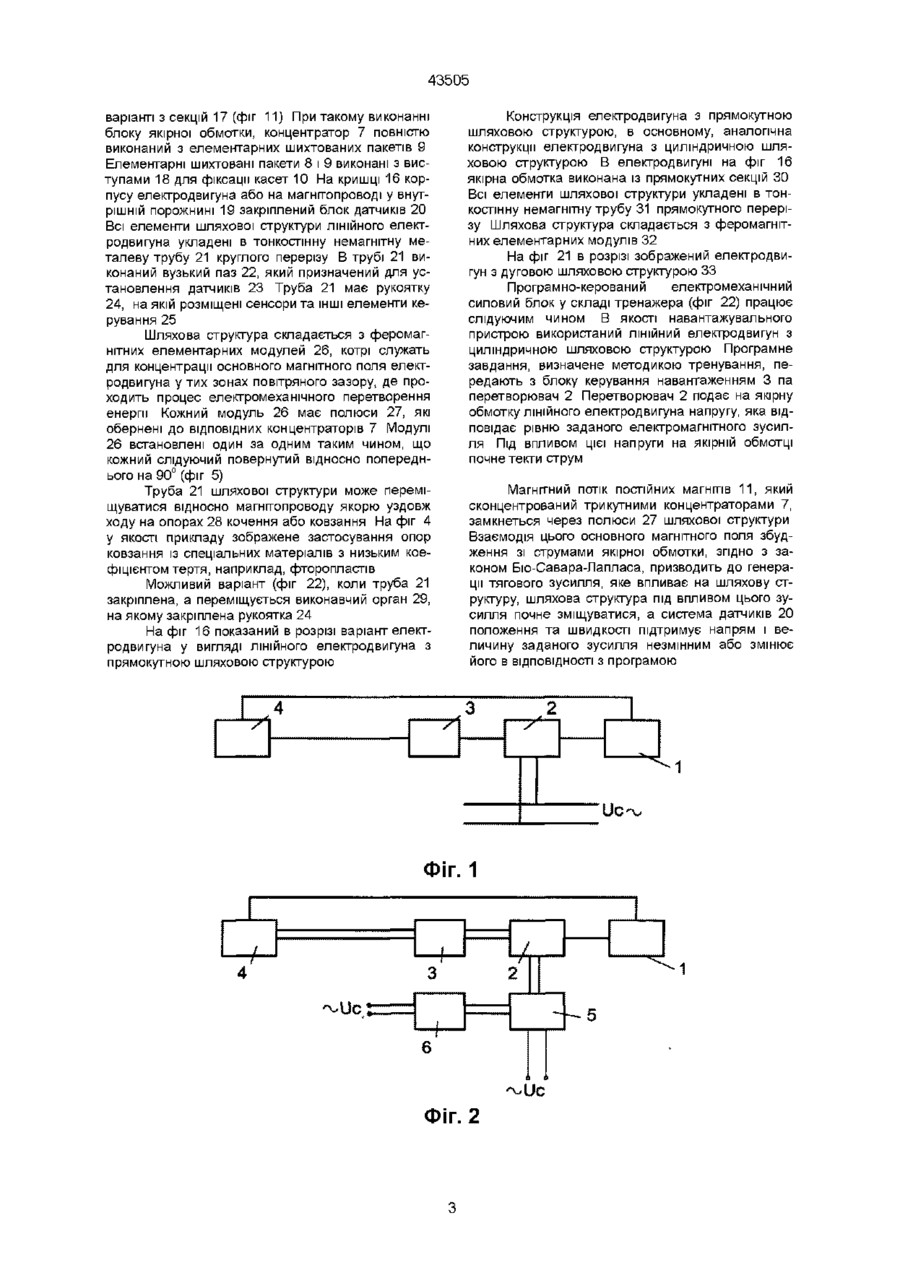
1 Програмно-керований електромеханічний силовий блок тренажерного та терапевтичного обладнання, що містить в собі навантажувальний пристрій, виконаний у вигляді електродвигуна, блок керування навантаженням, датчики зворотного зв'язку і керований перетворювач, котрі підключені до незалежного джерела живлення, який відрізняється тим, що електродвигун, виконаний з розімкненою магнітною системою, має висококоерцитивні ПОСТІЙНІ магніти, трикутні магнітні концентратори потоку та шляхову структуру, яка безпосередньо зв'язана з виконавчим органом обладнання, при цьому незалежне джерело живлення підключене до керованого перетворювача 2 Програмно-керований електромеханічний силовий блок по п 1, який відрізняється тим, що електродвигун з розімкненою магнітною системою СИЛОВИЙ БЛОК видається під відповідальність власника патенту ТРЕНАЖЕРНОГО ТА виконаний у вигляді ЛІНІЙНОГО електродвигуна з циліндричною шляховою структурою 3 Програмно-керований електромеханічний силовий блок по п 1, який відрізняється тим, що електродвигун з розімкненою системою виконаний у вигляді ЛІНІЙНОГО електродвигуна з прямокутною шляховою структурою 4 Програмно-керований електромеханічний силовий блок по п 1, який відрізняється тим, що електродвигун з розімкненою системою виконаний у вигляді електродвигуна з дуговою шляховою структурою 5 Програмно-керований електромеханічний силовий блок по п 1, який відрізняється тим, що блок якірних секцій електродвигуна виконаний модульним 6 Програмно-керований електромеханічний силовий блок по п 1, який відрізняється тим, що сенсори системи керування розміщені на захватах виконавчого органа обладнання 7 Програмно-керований електромеханічний силовий блок по п 6, який відрізняється тим, що блок безперебійного живлення виконаний у вигляді електрохімічного елемента 8 Програмно-керований електромеханічний силовий блок по п 6, який відрізняється тим, що блок безперебійного живлення виконаний у вигляді електрогенератора на паливних елементах ю о ю СО Винахід відноситься до тренажерних і лікувальних пристроїв та призначений для активного розвитку або реабілітації м'язів рук, ніг, черевного пресу, плечового поясу та інших м'язів Відомий пристрій для тренування м'язів і розробки суглобів, який містить кінематичну схему та навантажувальний пристрій, виконаний у вигляді пружних елементів і пружнього гальма (дивись, наприклад, авт свід СРСР № 1258442, кп А63В 21/00, 1986) Недоліком відомого пристрою є складність дозування навантаження, непостійність навантаження у різних фазах тренувального руху обмеженість його застосування Відомий програмно-керований електромеханічний силовий блок тренажерних та терапевтич Зоя них обладнань, що містить в собі навантажувальний пристрій, виконаний у вигляді електродвигуна, блок керування навантаженням, датчики зворотного зв'язку і керований перетворювач, котрі підключені до назалежного джерела живлення (див , наприклад, патент Роси № 2046618, кп А 63 В 24/00, 1995, бюл №30) Відомий СИЛОВИЙ блок входить до складу пристрою, виконавчий орган якого з'єднаний кінематично з навантажувальним пристроєм, який виконаний у вигляді електродвигуна обертального типу Недоліком відомого силового блоку є те, що наявність проміжних механічних передач, які необхідні для зв'язку з виконавчим органом, значно знижує надійність пристрою і підвищує його вартість 43505 В основу винаходу поставлена задача - створити принципово новий програмно-керований електромеханічний силовий блок тренажерних та терапевтичних обладнань, шляхом розробки нової конструкції навантажувального пристрою, яка забезпечує зв'язок з виконавчим органом без проміжних елементів, дозволяє з високою точністю регулювати та дозувати величину навантаження, яке прикладають при тренуванні або лікуванні, а також забезпечує надійність пристрою і знижує його вартість Поставлена задача вирішується тим, що в програмно-керованому електромеханічному силовому блоці тренажерних та терапевтичних обладнань, що містить в собі навантажувальний пристрій, виконаний у вигляді електродвигуна, блок керування навантаженням, датчики зворотного зв'язку і керований перетворювач, котрі підключені до незалежного джерела живлення, згідно з винаходом, електродвигун, виконаний з розімкненою магнітною системою, має висококоерцитівні ПОСТІЙНІ магніти, трикутні магнітні концентратори потоку та шляхову структуру, яка, безпосередньо, зв'язана з виконавчим органом обладнання, при цьому незалежне джерело живлення підключене до керованого перетворювача Електродвигун може бути виконаним у вигляді ЛІНІЙНОГО електродвигуна з циліндричною або прямокутною шляховою структурою Можливо виконання електродвигуна у вигляді електродвигуна з дуговою шляховою структурою Використання двигунів з розімкненою магнітною структурою дозволяє повністю вилучити будьякі проміжні трансформатори механічної енергії електродвигуна, перейти до чисто електромагнітного польового впливу на виконавчий орган Блок якірних секцій електродвигуна може бути виконаний модульним, що дозволяє легко замінювати його при модернізації та ремонті силового блоку Сенсори системи керування можуть бути розміщені на захватах виконавчого органу обладнання, що підвищує регулювальні можливості пристрою, безпосередньо в процесі тренування або лікувального процесу Блок безперебійного живлення може бути виконаний у вигляді електрохімічного елементу або у вигляді електрогенератора на паливних елементах, що забезпечує надійність і безперервність проведення тренування або лікувального процесу, а також дає можливість реалізації автономних систем тренування Суть винаходу пояснюється кресленнями, на фіг 1 - блок-схема керування пристроєм при живленні від централізованої мережі живлення, на фіг 2 - блок-схема керування пристроєм при живленні від автономного джерела живлення, на фіг 3 - поперечний розріз ЛІНІЙНОГО електродвигуна з циліндричною шляховою структурою, на фіг 4 - розріз А-А на фіг З, на фіг 5 - елементарний пакет трикутного магнітного концентратора, який утворює зубець якірного магнггопроводу, на фіг 6 - теж саме, що на фіг 5 - вид збоку, на фіг 7 - елементарний пакет трикутного магнітного концентратора, який утворює паз якірного магнггопроводу, на фіг 8 - теж саме, що на фіг 7 - вид збоку, на фіг 9 - секція якірної обмотки ЛІНІЙНОГО електродвигуна з циліндричною шляховою структурою, на фіг 10 - розріз Б-Б на фіг 9, на фіг 11 - касетний варіант якірної обмотки, на фіг 12 - розміщення датчиків і сенсорів на циліндричній шляховій структурі, на фіг 13 - розріз В-В на фіг 12 на фіг 14 - феромагнітний елементарний модуль циліндричної шляхової структури, на фіг 15 - аксонометрична проекція відрізку внутрішньої частини циліндричної шляхової структури, на фіг 16 - поперечний розріз ЛІНІЙНОГО електродвигуна з прямокутною шляховою структурою, на фіг 17 - секція якірної обмотки ЛІНІЙНОГО електродвигуна з прямокутною шляховою структурою, на фіг 18 - розріз С-С на фіг 17, на фіг 19 - феромагнітний елементарний модуль прямокутної шляхової структури, на фіг 20 - аксонометрична проекція відрізку внутрішньої частини прямокутної шляхової структури, на фіг 21 - поперечний розріз електродвигуна з дуговою шляховою структурою, на фіг 22 - приклад виконання спортивного тренажеру Програмно-керований електромеханічний силовий блок містить навантажувальний пристрій, виконаний у вигляді електродвигуна 1, керований перетворювач 2, блок керування навантаженням З, датчики зворотного зв'язку 4 Перетворювач 2 з'єднаний з електродвигуном 1 і підключений до незалежного джерела живлення, наприклад, до нагромаджувача 5 електричної енергії, котрий з'єднаний з зарядним пристроєм 6 (фіг 2) Джерело постійного живлення може бути також виконане у вигляді електрохімічного елементу або у вигляді електрогенератора на паливних елементах На фіг 3 і 4 зображений у розрізі варіант виконання електродвигуна з розімкненою магнітною системою, з циліндричною шляховою структурою Активний модуль цього електродвигуна містить чотири трикутних магнітних концентратора 7 потоку, які мають елементарні шихтовані пакети 8 і 9, які, ВІДПОВІДНО, утворюють зубцеву та пазову зони якірного магнітопроводу На гранях концентраторів 7, які повернуті зовні, закріплені касети 10 з висококоерцитівними постійними магнггами 11, які попарно повернуті однойменними полюсами до бокових граней кожного з концентраторів 7 Повний контур замикання основного магнітного потоку створюється завдяки феромагнітним магнггопроводам 12, які закріплені на стінках немагнітного корпусу 13 електродвигуна 1 Елементарні шихтовані пакети 8 і 9 концентраторів 7 виконані з отворами 14 і вставлені по черзі на шпильках 15, що закріплені в кришках 16 корпусу В пазах елементарних шихтованих пакетів 9 встановлені круглі секції 17 якірної обмотки електродвигуна Блок якірної обмотки може бути виконаний у касетному 43505 варіанті з секцій 17 (фіг 11) При такому виконанні блоку якірної обмотки, концентратор 7 повністю виконаний з елементарних шихтованих пакетів 9 Елементарні шихтовані пакети 8 і 9 виконані з виступами 18 для фіксації касет 10 На кришці 16 корпусу електродвигуна або на магнгтопроводі у внутрішній порожнині 19 закріплений блок датчиків 20 Всі елементи шляхової структури ЛІНІЙНОГО електродвигуна укладені в тонкостінну немагнітну металеву трубу 21 круглого перерізу В трубі 21 виконаний вузький паз 22, який призначений для установлення датчиків 23 Труба 21 має рукоятку 24, на якій розміщені сенсори та ІНШІ елементи керування 25 Шляхова структура складається з феромагнітних елементарних модулей 26, котрі служать для концентрації основного магнітного поля електродвигуна у тих зонах повітряного зазору, де проходить процес електромеханічного перетворення енергії Кожний модуль 26 має полюси 27, які обернені до ВІДПОВІДНИХ концентраторів 7 Модулі 26 встановлені один за одним таким чином, що кожний слідуючий повернутий відносно попереднього на 90° (фіг 5) Труба 21 шляхової структури може переміщуватися відносно магнггопроводу якорю уздовж ходу на опорах 28 кочення або ковзання На фіг 4 у якості прикладу зображене застосування опор ковзання із спеціальних матеріалів з низьким коефіцієнтом тертя, наприклад, фторопластів Можливий варіант (фіг 22), коли труба 21 закріплена, а переміщується виконавчий орган 29, на якому закріплена рукоятка 24 На фіг 16 показаний в розрізі варіант електродвигуна у вигляді ЛІНІЙНОГО електродвигуна з прямокутною шляховою структурою 4 Конструкція електродвигуна з прямокутною шляховою структурою, в основному, аналогічна конструкції електродвигуна з циліндричною шляховою структурою В електродвигуні на фіг 16 якірна обмотка виконана із прямокутних секцій ЗО Всі елементи шляхової структури укладені в тонкостінну немагнітну трубу 31 прямокутного перерізу Шляхова структура складається з феромагнітних елементарних модулів 32 На фіг 21 в розрізі зображений електродвигун з дуговою шляховою структурою 33 Програмно-керований електромеханічний силовий блок у складі тренажера (фіг 22) працює слідуючим чином В якості навантажувального пристрою використаний ЛІНІЙНИЙ електродвигун з циліндричною шляховою структурою Програмне завдання, визначене методикою тренування, передають з блоку керування навантаженням 3 па перетворювач 2 Перетворювач 2 подає на якірну обмотку ЛІНІЙНОГО електродвигуна напругу, яка відповідає рівню заданого електромагнітного зусилля Під ВПЛИВОМ ЦІЄЇ напруги на якірній обмотці почне текти струм Магнітний потік постійних магнтв 11, який сконцентрований трикутними концентраторами 7, замкнеться через полюси 27 шляхової структури Взаємодія цього основного магнітного поля збудження зі струмами якірної обмотки, згідно з законом Бю-Савара-Лапласа, призводить до генерації тягового зусилля, яке впливає на шляхову структуру, шляхова структура під впливом цього зусилля почне зміщуватися, а система датчиків 20 положення та швидкості підтримує напрям і величину заданого зусилля незмінним або змінює його в ВІДПОВІДНОСТІ з програмою 2 >3 "•• ФІГ. 1 Фіг. 2 Jo 43505 27 17 \ 13 21 11 19 Фіг. 4 7 11 43505 Фіг. 6 Фіг. 5 Б-Б 17 Фіг. 9 Фіг. 7 Фіг. 8 17 Фіг. 10 _ 24 25' 23 23 22 я 21 / і іші 23 В 23 25' Фіг. 12 Фіг. 13 43505 \ 32 /ЗО 31 \ ФІГ. 16 с ЗО C-C ЗО 32 Фіг. 17 Фіг. 18 Фіг. 20 Фіг. 19 43505 19 Фіг. 21 Фіг. 22 Тираж 50 екз. Відкрите акціонерне товариство «Патент» Україна, 88000, м. Ужгород, вул. Гагаріна, 101 (03122) 3 - 7 2 - 8 9 (03122) 2 - 5 7 - 0 3 43505
ДивитисяДодаткова інформація
Автори англійськоюBerlikov Viktor Tryfonovych, Vasyliev Valerii Valentynovych
Автори російськоюБеликов Виктор Трифонович, Васильев Валерий Валентинович
МПК / Мітки
МПК: A63B 24/00
Мітки: обладнання, тренажерного, силовий, терапевтичного, програмно-керований, блок, електромеханічний
Код посилання
<a href="https://ua.patents.su/8-43505-programno-kerovanijj-elektromekhanichnijj-silovijj-blok-trenazhernogo-ta-terapevtichnogo-obladnannya.html" target="_blank" rel="follow" title="База патентів України">Програмно-керований електромеханічний силовий блок тренажерного та терапевтичного обладнання</a>
Електромеханічний імпульсний перетворювач індукційного типу
Номер патенту: 39634
Опубліковано: 15.06.2001
Автори: Болюх Євген Володимирович, Болюх Володимир Федорович
МПК: H02K 33/00, H02K 41/025
Мітки: перетворювач, індукційного, імпульсний, електромеханічний, типу
Формула / Реферат:
1. Електромеханічний імпульсний перетворювач індукційного типу, який містить статорну обмотку збудження, що підключається до джерела імпульсного струму, і рухомий якір, що коаксіально встановлений всередині обмотки і складається із витягнутого в осьовому напрямку порожнистого електропровідного циліндра, всередині якого розташований допоміжний елемент, який відрізняється тим, що в порожнистому електропровідному циліндрі від одного до...
Великогабаритний електромеханічний годинник

Номер патенту: 33022
Опубліковано: 15.02.2001
Автори: Якимів Ярослав Михайлович, Кубай Роман Іванович, Мосоров Володимир Якович
МПК: G04C 3/00
Мітки: годинник, великогабаритний, електромеханічний
Текст:
...є виходом звукового сигналу/одинока . Введення в схему годинника датчика положення стрілки , формувача імпульсу запуску, формувача адресних кодів , програмованого запам'ятовуючого пристрою і цифроаналогового перетворювача дає можливість кожну годину озвучувати годинник синтезованими музич ними фрагментами. Винахід пояснюється кресленням , на якому зображена функціональна схема великогабаритного електромеханічного годинника ....
Електромеханічний привод регулятора міжелектродного проміжка
Номер патенту: 22898
Опубліковано: 05.05.1998
Автор: Боков Віктор Михайлович
МПК: F16H 27/00
Мітки: електромеханічний, привод, регулятора, проміжка, міжелектродного
Формула / Реферат:
Електромеханічний привод регулятора міжелектродного проміжка, що має електродвигун та редуктор для перетворювання обертального руху у поступальний, який відрізняється тим, що у редуктор убудовано мальтійський механізм.
Імпульсний електромеханічний прискорювач індукційного типу
Номер патенту: 38934
Опубліковано: 15.05.2001
Автор: Болюх Володимир Федорович
МПК: H02K 41/025, H02K 33/00
Мітки: електромеханічний, прискорювач, імпульсний, типу, індукційного
Формула / Реферат:
I. Імпульсний електромеханічний прискорювач індукційного типу, який включає статорну обмотку збудження, що має циліндричну форму і підключається за допомогою ключа до зарядженої конденсаторної батареї, і виконаний із електропровідного матеріалу та коаксіальне розташований всередині обмотки із зсувом у бік прискорення порожнистий циліндричний рухомий якір, всередині якого розташований допоміжний елемент, який відрізняється тим, що...
Програмно-апаратний модуль криптографічного захисту інформації
Номер патенту: 33745
Опубліковано: 15.02.2001
Автори: Столяр Олександр Анатолійович, Горбенко Іван Дмитрович, Бондаренко Михайло Федорович, Свинарьов Андрій Володимирович, Торба Олександр Олексійович, Лапін Віктор Валентинович
МПК: H04L 9/00
Мітки: модуль, інформації, захисту, програмно-апаратний, криптографічного
Текст:
...чином. У ПЗП 10 на етапі інсталяції програмноапаратного модуля криптографічного захисту ін формації заносяться алгоритми криптографічних перетворень. Процесори 7 і 9 при організації захищеного обміну на основі випадкових бітових послідовностей, сформованих генератором 8, виробляють ключі обміну. Крім цього, в процесорах 7 і 9 на основі випадкових бітових послідовностей генератора 8 формуються сеансові і робочі ключі, а також...
Попередній патент: Крем для взуття
Наступний патент: Спосіб виплавки сплаву в електронно-променевій гарнісажній установці
Випадковий патент: Спосіб діагностики пошкоджень в тонких тілах