Пристрій для виміру витрати транспортованого матеріалу в елеваторі
Формула / Реферат
1. Пристрій для виміру витрати транспортованого матеріалу в елеваторі, у транспортній шахті якого встановлені з можливістю безперервного переміщення за типом норії транспортуючі лопаті, завантажені транспортованим матеріалом, зокрема зерновою масою, і до поверхні яких в основному паралельно їм спрямований пучок світлових променів розташованого в транспортній шахті поперечно їй світлового бар'єра, за часом світло-тіньових сигналів якого процесор сигналів визначає з урахуванням відстаней між транспортуючими лопатями та товщини транспортуючої лопаті відповідну відстань до поверхні транспортованого матеріалу на перетинаючій бар'єр транспортуючій лопаті, а за цією відстанню і площею поперечного перерізу транспортної шахти визначає обсяг транспортованого матеріалу, який відрізняється тим, що до процесора сигналів підключені додаткові вимірювальні засоби, за вимірювальними сигналами яких процесор визначає відповідно нахил і/або форму поверхні транспортованого матеріалу і відповідно до їхнього напрямку та положення стосовно пучка світлових променів визначає точний обсяг транспортованого матеріалу.
2. Пристрій за п. 1, який відрізняється тим, що як додаткові вимірювальні засоби паралельно один одному, перпендикулярно першому світловому бар'єру, поперечно транспортній шахті встановлена пара світлових бар'єрів, на основі вимірювальних сигналів яких за відповідним часовим інтервалом їхніх світло-тіньових переходів, віднесених до відстані між світловими бар'єрами, визначають нахил поверхні транспортованого матеріалу в цьому напрямку, за цим нахилом пропорційно половині довжини шахти формують величину поправки, а з використанням останньої за відстанню до поверхні транспортованого матеріалу, визначеною раніше з використанням іншого світлового бар'єра, визначають середню відстань до поверхні транспортованого матеріалу.
3. Пристрій за п. 2, який відрізняється тим, що світлові бар'єри пари світлових бар'єрів розташовані поблизу відповідної паралельної їм бічної стінки шахти.
4. Пристрій за п. 1, який відрізняється тим, що один з додаткових вимірювальних засобів є щонайменше датчиком прискорення і/або датчиком нахилу.
5. Пристрій за одним з попередніх пунктів, який відрізняється тим, що світловий бар'єр, що служить для визначення висоти поверхні транспортованого матеріалу, розташований у середині поперечного перерізу шахти між її бічними сторонами, стосовно яких транспортуючі лопаті встановлені перпендикулярно незалежно від витрати транспортованого матеріалу.
6. Пристрій за одним з попередніх пунктів, який відрізняється тим, що декілька, зокрема два паралельних світлових бар'єри, служать для визначення висоти поверхні транспортованого матеріалу за серединою поперечного перерізу між стінками шахти, поблизу яких вони розташовані, шляхом усереднення відповідних окремих значень висоти поверхні транспортованого матеріалу в залежності від її положення в зоні світлових бар'єрів.
7. Пристрій за одним з попередніх пунктів, який відрізняється тим, що з використанням паралельних світлових бар'єрів визначають нахил(и) транспортуючих лопатей і/або відстань(ні) до поверхні транспортованого матеріалу, які служать для визначення обсягу транспортованого матеріалу і видаються як кінцеві величини.
8. Пристрій за одним з попередніх пунктів, який відрізняється тим, що два паралельних світлових бар'єри розташовані кожен поблизу відповідної паралельної сусідньої йому стінки.
9. Пристрій за одним з попередніх пунктів, який відрізняється тим, що пучок(чки) світлових променів від світлового(их) бар'єра(ів) має(ють) діаметр, більший за поперечний переріз максимального компонента транспортованого матеріалу.
10. Пристрій за одним з попередніх пунктів, який відрізняється тим, що поточне значення яскравості сигналу світлового бар'єра, що служить для визначення часового пункту світло-тіньового і тіньо-світлового переходів, порівнюють із середнім значенням уведених раніше в процесор максимального та мінімального значень яскравості і при цьому перевищення середнього значення або недосягнення його використовують для визначення часового пункту вищезазначеного переходу.
11. Пристрій за одним з попередніх пунктів, який відрізняється тим, що відстань до поверхні транспортованого матеріалу контролюють в залежності від нахилу транспортуючих лопатей та геометрії шахти, перевіряючи, чи повністю транспортуюча лопать покрита транспортованим матеріалом, і, якщо це не так, то шляхом розрахунку відповідних об'ємів пірамід і призм визначають сумарний обсяг транспортованого матеріалу або ж при недостатній вимірювальній інформації оцінюють його шляхом екстраполяції.
12. Пристрій за одним з попередніх пунктів, який відрізняється тим, що для мінімізації припустимої похибки визначення насипного кута в залежності від значень прискорення і/або вологовмісту зернової культури даного виду, а також внаслідок зміни нахилу визначають величину поправки на форму поверхні транспортованого матеріалу, щоб скорегувати приблизно розрахований його обсяг.
13. Пристрій за одним з попередніх пунктів, який відрізняється тим, що для зменшення припустимої похибки визначення насипного кута транспортуючі лопаті поблизу входу до зони світлового(их) бар'єра(ів) піддають вібраційній дії і/або стінки шахти виконуються з можливістю гальмування транспортованого матеріалу.
14. Пристрій за п. 1, який відрізняється тим, що щонайменше в одному напрямку встановлено безліч паралельних світлових бар'єрів, за відносною тривалістю тіньових сигналів яких визначають контур профілю поверхні транспортованого матеріалу, який враховується при визначенні його обсягу.
15. Пристрій за одним з попередніх пунктів, який відрізняється тим, що оптичні випромінювачі та приймачі світлових бар'єрів встановлені на різних стінках шахти навпроти один одного або розташовані поблизу один від одного і спрямовані на рефлектор, розташований на протилежному боці.
Текст
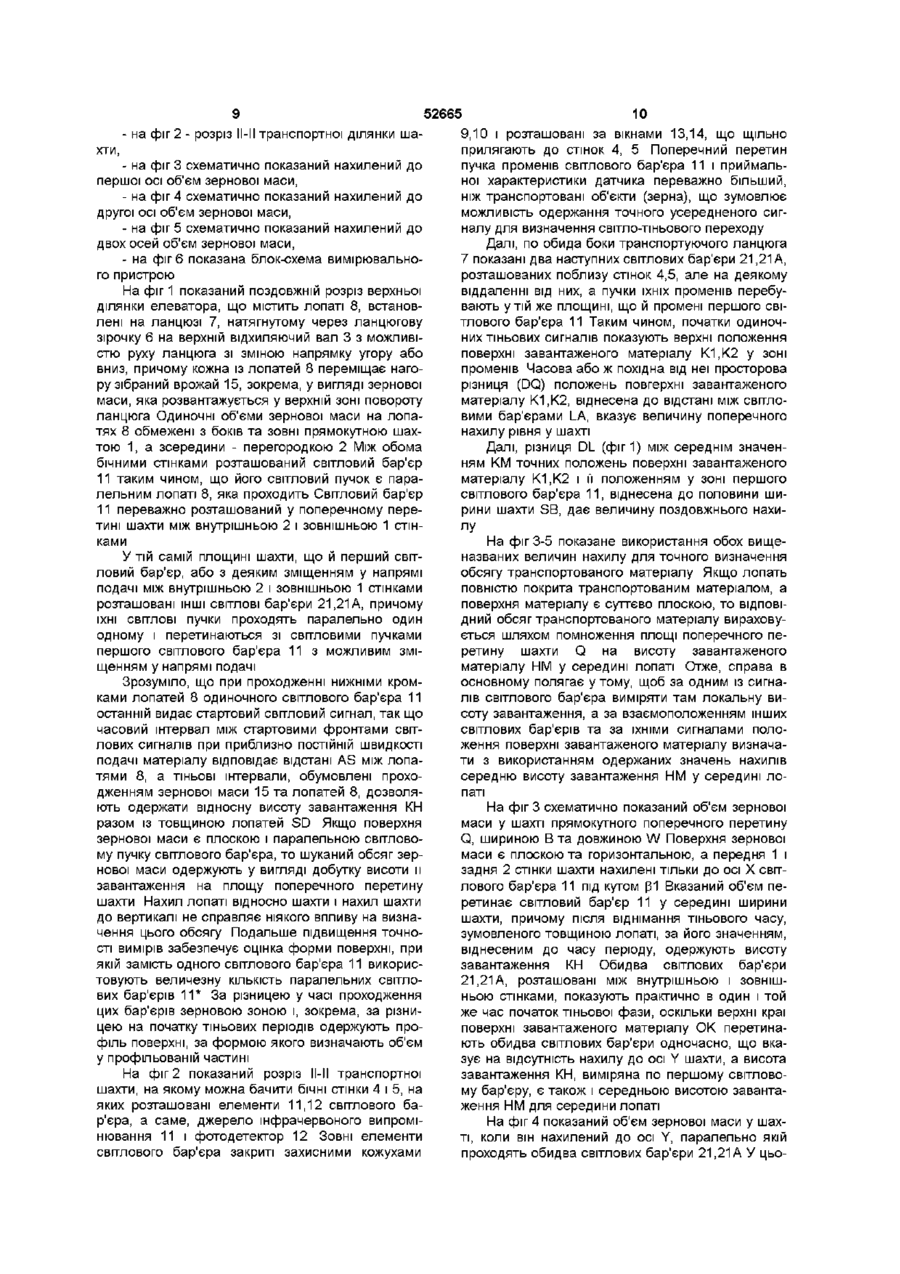
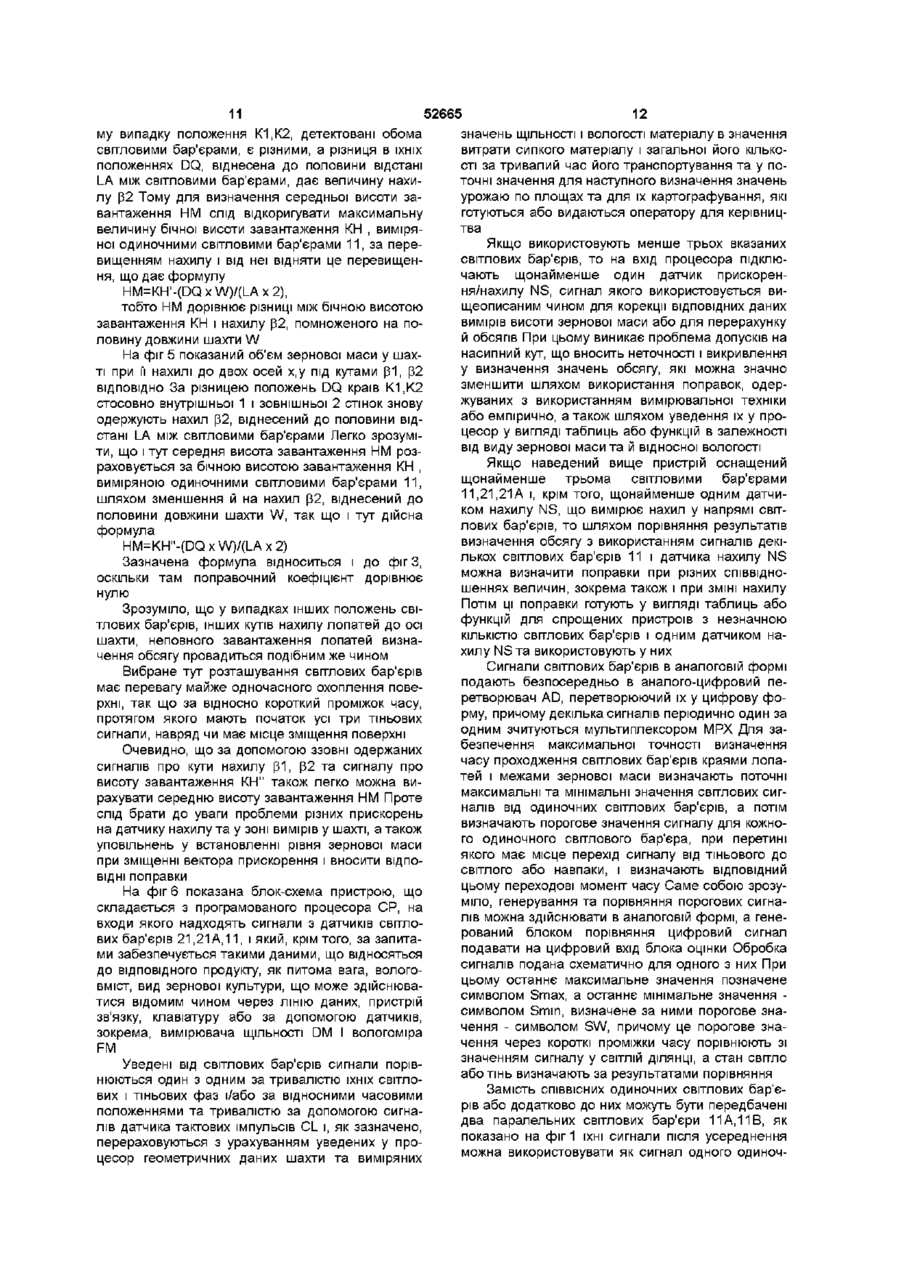
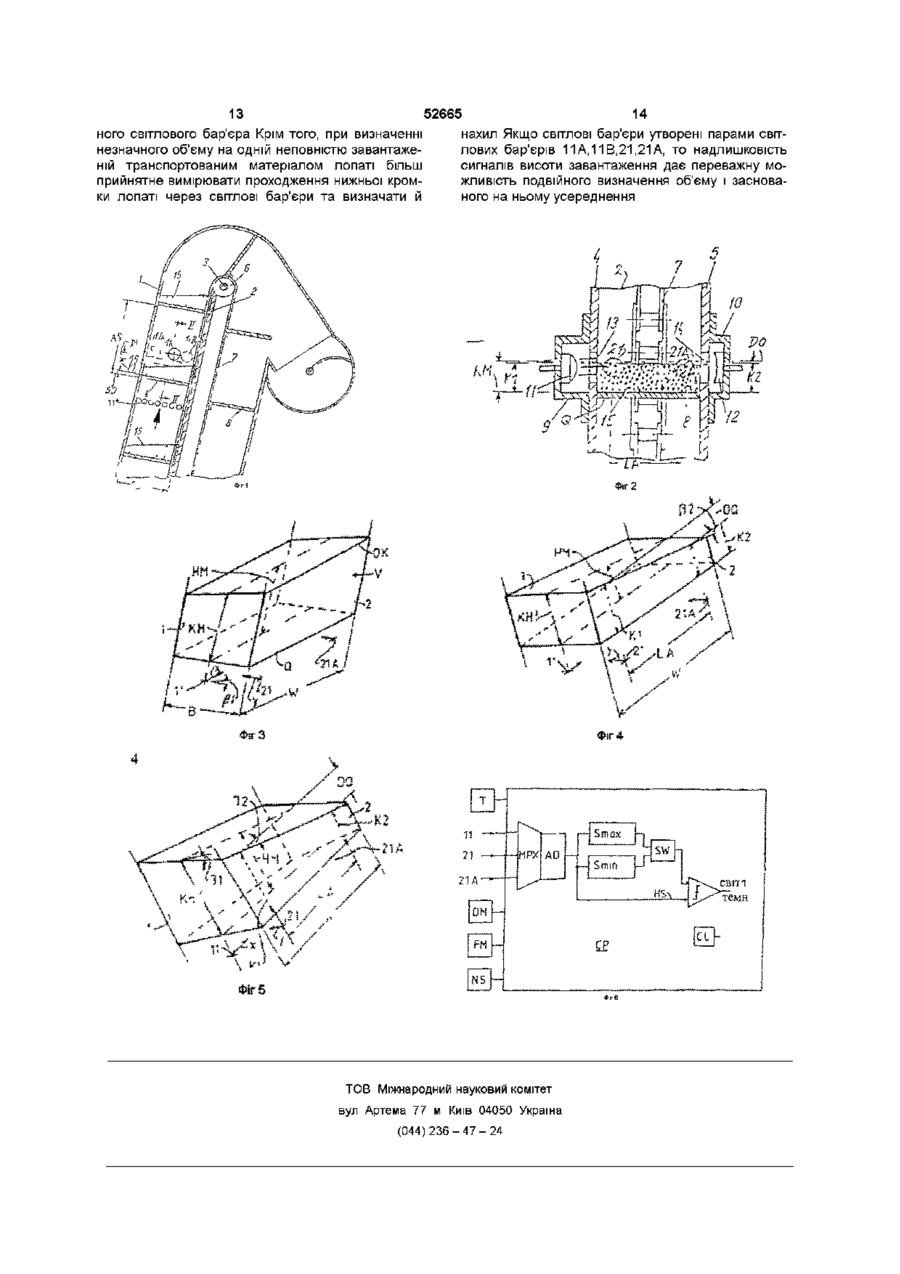
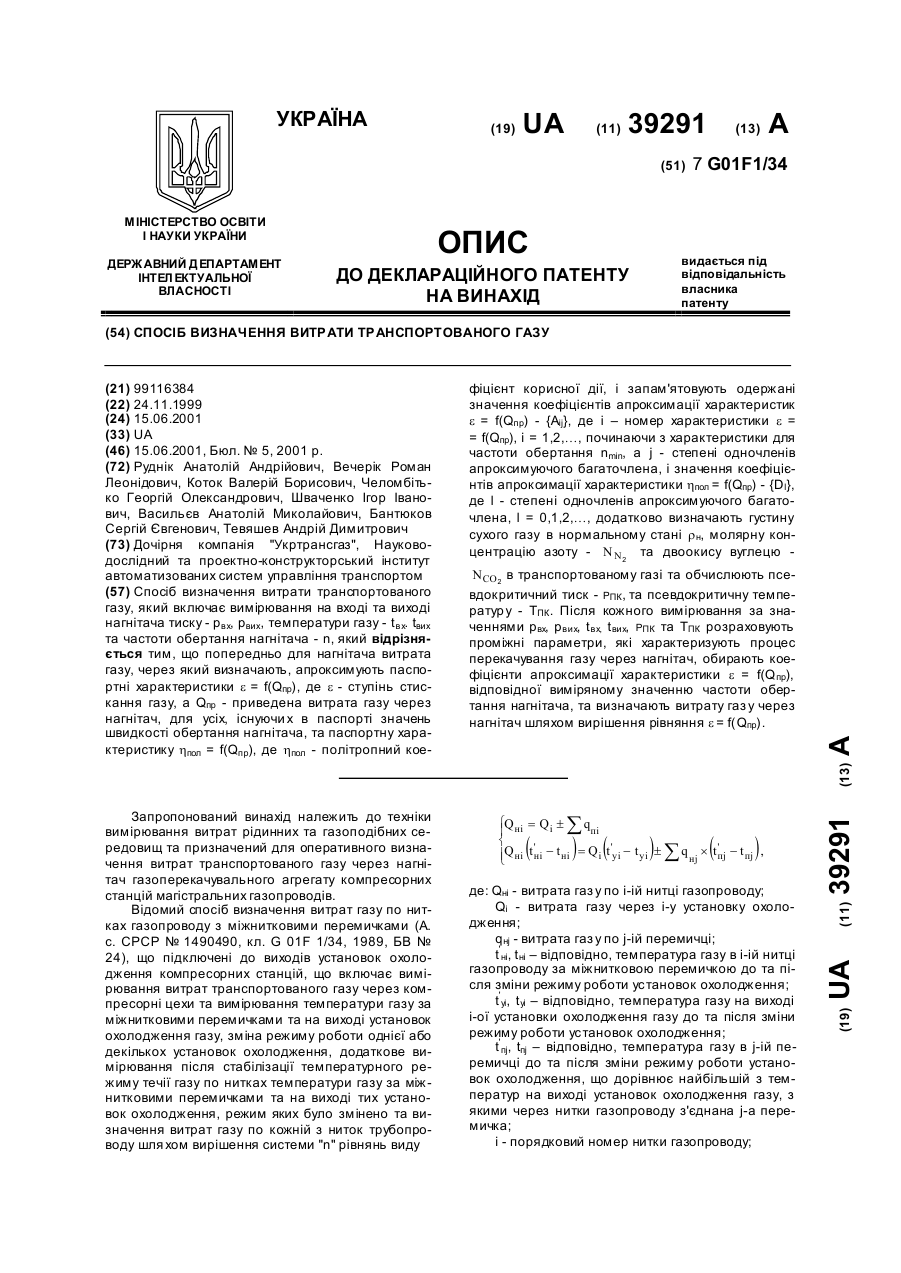
1 Пристрій для виміру витрати транспортованого матеріалу в елеваторі, у транспортній шахті якого встановлені з можливістю безперервного переміщення за типом норм транспортуючі лопаті, завантажені транспортованим матеріалом, зокрема зерновою масою, і до поверхні яких в основному паралельно їм спрямований пучок світлових променів розташованого в транспортній шахті поперечно їй світлового бар'єра, за часом СВІТЛОТІНЬОВИХ сигналів якого процесор сигналів визначає з урахуванням відстаней між транспортуючими лопатями та товщини транспортуючої лопаті відповідну відстань до поверхні транспортованого матеріалу на перетинаючій бар'єр транспортуючій лопаті, а за цією відстанню і площею поперечного перерізу транспортної шахти визначає обсяг транспортованого матеріалу, який відрізняється тим, що до процесора сигналів підключені додаткові вимірювальні засоби, за вимірювальними сигналами яких процесор визначає ВІДПОВІДНО нахил і/або форму поверхні транспортованого матеріалу і ВІДПОВІДНО до їхнього напрямку та положення стосовно пучка світлових променів визначає точний обсяг транспортованого матеріалу 2 Пристрій за п 1, який відрізняється тим, що як додаткові вимірювальні засоби паралельно один одному, перпендикулярно першому світловому бар'єру, поперечно транспортній шахті встановлена пара світлових бар'єрів, на основі вимірювальних сигналів яких за ВІДПОВІДНИМ часовим інтервалом їхніх СВІТЛО-ТІНЬОВИХ переходів, віднесених до відстані між світловими бар'єрами, визначають нахил поверхні транспортованого матеріалу в цьому напрямку, за цим нахилом пропорційно половині довжини шахти формують величину попра вки, а з використанням останньої за відстанню до поверхні транспортованого матеріалу, визначеною раніше з використанням іншого світлового бар'єра, визначають середню відстань до поверхні транспортованого матеріалу 3 Пристрій за п 2, який відрізняється тим, що СВІТЛОВІ бар'єри пари світлових бар'єрів розташовані поблизу відповідної паралельної їм бічної стінки шахти 4 Пристрій за п 1, який відрізняється тим, що один з додаткових вимірювальних засобів є щонайменше датчиком прискорення і/або датчиком нахилу 5 Пристрій за одним з попередніх пунктів, який відрізняється тим, що світловий бар'єр, що служить для визначення висоти поверхні транспортованого матеріалу, розташований у середині поперечного перерізу шахти між и бічними сторонами, стосовно яких транспортуючі лопаті встановлені перпендикулярно незалежно від витрати транспортованого матеріалу 6 Пристрій за одним з попередніх пунктів, який відрізняється тим, що декілька, зокрема два паралельних світлових бар'єри, служать для визначення висоти поверхні транспортованого матеріалу за серединою поперечного перерізу між стінками шахти, поблизу яких вони розташовані, шляхом усереднення ВІДПОВІДНИХ окремих значень висоти поверхні транспортованого матеріалу в залежності від и положення в зоні світлових бар'єрів 7 Пристрій за одним з попередніх пунктів, який відрізняється тим, що з використанням паралельних світлових бар'єрів визначають нахил(и) транспортуючих лопатей і/або відстань(ні) до поверхні транспортованого матеріалу, які служать для визначення обсягу транспортованого матеріалу і видаються як кінцеві величини 8 Пристрій за одним з попередніх пунктів, який відрізняється тим, що два паралельних світлових бар'єри розташовані кожен поблизу відповідної паралельної сусідньої йому стінки 9 Пристрій за одним з попередніх пунктів, який відрізняється тим, що пучок(чки) світлових променів від світлового (их) бар'єра(ів) має(ють) діаметр, більший за поперечний переріз максимального компонента транспортованого матеріалу 10 Пристрій за одним з попередніх пунктів, який О ю (О (О ю 52665 відрізняється тим, що поточне значення яскравої культури даного виду, а також внаслідок зміни вості сигналу світлового бар'єра, що служить для нахилу визначають величину поправки на форму визначення часового пункту СВІТЛО-ТІНЬОВОГО і поверхні транспортованого матеріалу, щоб скореТІНЬО-СВІТЛОВОГО переходів, порівнюють із середнім гувати приблизно розрахований його обсяг значенням уведених раніше в процесор макси13 Пристрій за одним з попередніх пунктів, який мального та мінімального значень яскравості і при відрізняється тим, що для зменшення припустицьому перевищення середнього значення або немої похибки визначення насипного кута транспордосягнення його використовують для визначення туючі лопаті поблизу входу до зони світлового(их) часового пункту вищезазначеного переходу бар'єра(ів) піддають вібраційній дії і/або стінки шахти виконуються з можливістю гальмування транс11 Пристрій за одним з попередніх пунктів, який портованого матеріалу відрізняється тим, що відстань до поверхні транспортованого матеріалу контролюють в зале14 Пристрій за п 1, який відрізняється тим, що жності від нахилу транспортуючих лопатей та геощонайменше в одному напрямку встановлено метри шахти, перевіряючи, чи повністю транспорбезліч паралельних світлових бар'єрів, за відностуюча лопать покрита транспортованим ною тривалістю тіньових сигналів яких визначають матеріалом, і, якщо це не так, то шляхом розрахуконтур профілю поверхні транспортованого матенку ВІДПОВІДНИХ об'ємів пірамід і призм визначають ріалу, який враховується при визначенні його обсумарний обсяг транспортованого матеріалу або ж сягу при недостатній вимірювальній інформації оціню15 Пристрій за одним з попередніх пунктів, який ють його шляхом екстраполяції відрізняється тим, що оптичні випромінювачі та приймачі світлових бар'єрів встановлені на різних 12 Пристрій за одним з попередніх пунктів, який стінках шахти навпроти один одного або розташовідрізняється тим, що для мінімізації припустимої вані поблизу один від одного і спрямовані на рефпохибки визначення насипного кута в залежності лектор, розташований на протилежному боці від значень прискорення і/або вологовмісту зерно Винахід стосується пристрою для виміру витрати матеріалу, транспортованого елеватором, у транспортній шахті якого за типом норм безперервно переміщають транспортуючі лопаті, завантажені транспортованим матеріалом, зокрема врожаєм зернових, причому до переважно плоских поверхонь лопатей паралельно спрямований пучок світлових променів від встановленого в шахті поперечно лопатям світлового бар'єра, при цьому процесор сигналів за часом сигналів світла та ТІНІ визначає з урахуванням відстаней між транспортуючими лопатями та їхньої товщини відповідну відстань до поверхні транспортованого матеріалу на транспортуючій лопаті, що проходить, і за цією відстанню та площею поперечного перетину транспортної шахти визначає ВІДПОВІДНИЙ обсяг транспортованого матеріалу Із заявки ФРН №3045728 С2 відомий подібного роду пристрій, у якому безкінечний транспортуючий ланцюг, що обертається у прямокутній транспортній шахті, безперервно за типом норм тягне транспортуючі лопаті, орієнтовані приблизно перпендикулярно стінкам шахти і завантажені зібраним врожаєм, зокрема зерновою масою Поверхня зернового шару на лопатях орієнтована приблизно горизонтально, а транспортна шахта звичайно розташована у зернозбиральному комбайні в площині обертання транспортуючого ланцюга похило до вертикалі Паралельно цим лопатям між бічними стінками шахти змонтований світловий бар'єр, тіньовий час якого вимірюють при перетинанні його окремими завантаженими транспортованим матеріалом лопатями, а за цим часом з урахуванням ВІДПОВІДНОГО ТОВЩИНІ лопатей затінення самими лопатями визначають висоту завантаження і шляхом и помноження на площу поперечного перетину шахти або функцію геомет ри шахти визначають обсяг транспортованої зернової маси Відносно ТОЧНО цей пристрій працює тільки тоді, коли в нормальному положенні елеватора збиральний комбайн знаходиться на горизонтальній площині, а лопаті в достатній мірі заповнені транспортованим матеріалом, однак при поперечному або поздовжньому нахилі елеватора стосовно його нормального положення, що має місце при русі комбайна на схилах, при різному завантаженні зернових бункерів та при грузькому підґрунтовому шарі, цей пристрій працює зі значними хибами, причому у більшості випадків він визначає надто великі обсяги зернової маси Далі, із заявки ФРН №19544057 АІ відомий спосіб систематичної, такої, що проводиться розрахунковим шляхом, корекції надто занижених значень ваги транспортованої у похилому Далі, із заявки ФРН №19544057 АІ відомий спосіб систематичної, такої, що проводиться розрахунковим шляхом, корекції надто занижених значень ваги транспортованої у похилому елеваторі зернової маси, визначених ваговим датчиком, з використанням сигналу одного з діючих у двох напрямках датчиків нахилу до дійсних значень транспортованих кількостей зернової маси Вагове обладнання елеватора та від'єднання його від привода є технічно складним Крім того, з європейської заявки №0702891 А1 відомий зв'язок поточних значень врожаю, зміряних у збиральній машині, з ґрунтовим комплексом, сигналами швидкості та константами часу руху і встановлення за ними кадастру врожаю При цьому використовують уведені у процесор або задані ззовні значення стандартної маси одного літра зерна для окремих видів сільськогосподарських культур при середній їхній якості та середній вологості Наводяться також значення врожайності та 52665 ВІДНОСНІ втрати Завданням винаходу є таке вдосконалення вищеназваного пристрою, щоб він при більш простій конструкції мав підвищену точність Вирішення завдання полягає у тому, що до процесора сигналів підключені додаткові засоби виміру, за вимірювальними сигналами яких визначають нахил і/або форму поверхні транспортованого матеріалу і ВІДПОВІДНО ДО їхнього напрямку та положення стосовно світлового пучка визначають точний обсяг транспортованого матеріалу Більш прийнятні форми виконання пристрою наведені у залежних пунктах запропонованого винаходу Для точного визначення обсягу транспортованого матеріалу корегують значення обсягу матеріалу, одержані з використанням світлових бар'єрів, із поправкою на нахили поверхні зернової маси до поверхні лопатей у напрямку вимірювальних променів та перпендикулярно їм При цьому вказані нахили визначають також із використанням додаткових світлових бар'єрів чи одиночних датчиків нахилу або їх поєднання Пристрій для виміру обсягу зернової маси у першій більш прийнятній формі виконання оснащений трьома світловими бар'єрами, з яких один розташований між двома протилежними сторонами шахти точно посередині, а обидва інших - перпендикулярно до них, переважно на однаковій висоті, наприклад, поблизу стінок шахти При цьому коливання шахти виключно навколо першого середнього світлового бар'єра не чинить ніякого впливу на вимір тіньового часу їхніх сигналів або висоти транспортованого матеріалу, тобто на вимір часу проходження днищем лопаті відстані до поверхні зернової маси Обидва інших світлових бар'єри показують однаковий рівень положення поверхні зернової маси, який, проте, через коливання шахти і в залежності від половини й ширини виходить більшим, ніж відповідна ДІЙСНОСТІ висота поверхні зернової маси, виміряна першим світловим бар'єром Проте, якщо коливання шахти мають місце лише навколо першого світлового бар'єра, то нахил визначають за зумовленою ним різницею у сигналах тіньових періодів або висоти поверхні зернової маси, віднесеної до відстані між світловими бар'єрами Релевантну середню висоту поверхні зернової маси можна тоді визначити за максимальною відстанню до поверхні транспортованого матеріалу, виміряною першим світловим бар'єром, а вказаний нахил просто визначають стосовно половини ширини шахти Якщо ж шахта нахилена під різними кутами до осей обох світлових бар'єрів, то при визначенні обсягу транспортованого матеріалу релевантну висоту його поверхні точно так само одержують за висотою матеріалу, заміряною першим світловим бар'єром і зменшеною на зумовлену нахилом різницю у висоті матеріалу біля стінок шахти та на и середині, що відповідає визначеному двома Іншими світловими бар'єрами нахилу шахти і відноситься до половини ширини шахти Якщо в даному випадку обидва паралельні СВІТЛОВІ бар'єри, що служать для визначення нахилу, встановлені на відстані один від одного, яка відповідає половині ширини шахти, то потреба у будь-яких додаткових перерахунках відпадає, а для одержання релевантної середньої висоти поверхні зернової маси різницю у виміряних значеннях висоти можна вивести безпосередньо з висоти, виміряної першим світловим бар'єром Якщо обидва паралельні СВІТЛОВІ бар'єри встановлені на відстані один від одного, яка перевищує половину ширини шахти, то все ж досягається більша точність вимірів, причому у будьякому випадку надто близьке розташування світлових бар'єрів до бічних стінок шахти може призвести до зменшення точності вимірів, через те що там зерна утримуються тертям об бічні стінки шахти і рівень поблизу них дещо знижується Якщо розміри зерен менші за зазор між кромками лопатей і бічними стінками шахти, то при транспортуванні зернової маси мають місце ПОСТІЙНІ втрати зерна З ПОСЛІДОВНОСТІ сигналів обох паралельних світлових бар'єрів одержують сигнал нахилу шахти, який може також використовуватися для інших функцій збиральної машини, наприклад, для компенсації впливу нахилу при просіванні зерна, для полегшення управління при русі по схилах або для додаткового управління при перевантаженні врожаю на транспортний засіб, що рухається паралельно Далі, нахил у другому напрямку,переважно у поздовжньому напрямку збиральної машини, можна визначати за трьома виміряними значеннями висоти транспортованого матеріалу, якщо рівень більш високо розташованого краю зернової маси на ЗОВНІШНІХ кромках лопатей, виміряний паралельними світловими бар'єрами, екстраполювати до максимального рівня у куту шахти, а з цього кутового рівня утворити різницю для рівня, виміряного одиночними світловими бар'єрами на ІНШІЙ бічній СТІНЦІ шахти за и серединою, і цю різницю віднести до ширини шахти Також і це значення нахилу, отримане з максимального кутового рівня для визначення рівня за серединою бічної стінки шахти можна використати у збиральній машині з іншою метою, наприклад, для управління потужністю двигуна або для регулювання швидкості машини Подібним же чином значення нахилу, виміряне незалежним датчиком нахилу, може бути використане для корекції значень рівня транспортованого матеріалу, виміряних з використанням одиночних світлових бар'єрів, причому, якщо одиночний світловий бар'єр розташований у бічній СТІНЦІ шахти, то необхідна тільки одна корекція, а нахил вимірюють по відношенню до горизонтальної осі, перпендикулярної світловому бар'єру Якщо одиночний світловий бар'єр розташований у напрямку довжини лопаті від транспортуючого ланцюга, то провисання лопаті при підвищеному й завантаженні не знижує точність вимірів при розташуванні світлового бар'єра посередині поперечного перетину лопаті, тому що поперечний перетин обсягу зернової маси, визначений за виміряним значенням середньої й висоти інваріантно по відношенню до нахилу верхньої поверхні зернової маси, точно так само, як І до нахилу поверхні лопаті до напряму виміру, а також до напряму по 52665 дачі Вищенаведені міркування ДІЙСНІ при нормальному заповненні лопатей, при якому уся їхня поверхня покрита зерновою масою При незначному заповненні лопатей утворюються невеличкі об'єми у вигляді криво зрізаних стовпів, що проходять у напрямі подачі, а також у вигляді призм та пірамід, обриси країв яких визначаються нахилами шахти Для визначення подібних порівняно незначних кількостей зернової маси більш прийнятне, щоб СВІТЛОВІ бар'єри детектували максимальний рівень по краях зернової маси Якщо СВІТЛОВІ бар'єри розташовані попарно на бічних стінках шахти, то щонайменше один вимірювальний промінь реєструє навіть мінімальну залишкову КІЛЬКІСТЬ зернової маси Для оцінки обсягу зернової маси достатньо одних лише вимірюваних величин, що стосуються залишкових кількостей зернової маси, які уловлюються тільки одним або двома світловими бар'єрами Проте, якщо можна використовувати придатні ЗОВНІШНІ сигнали нахилу, то без будь-яких утруднень за максимальним виміряним значенням висоти завантаження у зв'язку з положенням ВІДПОВІДНИХ СВІТЛОВИХ бар'єрів та сигналами нахилу, а також за геометрією шахти і лопаті можна шляхом розрахунку точно визначити залишковий обсяг зернової маси При неможливості використання ЗОВНІШНІХ сигналів нахилу використовують екстрапольовані за часом значення нахилу, визначені раніше при достатньому завантаженні лопатей Відхилення від прямокутної форми поперечного перетину шахти та від плоскої форми поверхні лопатей враховуються при визначенні обсягу зернової маси розрахунковим шляхом Перевірка і калібрування сигналів світлових бар'єрів проводиться шляхом часової кореляції відстаней між ідучими одна за одною лопатями за світловими та тіньовими періодами часу Виміряний тіньовий період також постійно приводять у ВІДПОВІДНІСТЬ до сумарного СВІТЛО-ТІНЬОВОГО пері оду, а з нього виводять відносний тіньовий час лопаті, щоб одержати значення висоти завантаження ВІДПОВІДНО до відстані між лопатями Підвищення точності вимірів досягається при паралельному використанні значень нахилу, одержаних з сигналів світлових бар'єрів, та генерованих ззовні значень нахилу з визначенням пов'язаних одне з одним значень або з добором із них таких при виникненні перешкод Саме собою зрозуміло, що точність безпосереднього виміру форми та положення поверхні зернової маси є більшою, ніж точність побічного їх визначення з використанням сигналів датчиків нахилу і прискорення, оскільки положення поверхні сипкого матеріалу звичайно не змінюється в ДІЛЯНЦІ насипного кута і встановлюється по-іншому тільки при переході цього кута та при динамічних впливах Проте постійне тертя сипкого матеріалу об стінки шахти при його транспортуванні чинить на зерна динамічний вплив, утворюючи все нові поверхні, розташовані перпендикулярно результуючому вектору прискорення, включаючи вектор гравітації Тому рекомендується щонайменше перед входом у зону виміру виконувати стінку шахти трохи профільованою для забезпечення нею фун 8 кції скидаючого профілю і/або здійснювати віброколивання лопаті, наприклад, у МІСЦІ уведення ланцюга у зону виміру шляхом ВІДПОВІДНИХ відхилень траєкторії ланцюга у бік зернової маси При виборі місця встановлення світлових бар'єрів у верхній частині транспортної шахти має місце значне нівелювання поверхні зернової маси у процесі підйому, а втрати зерна на краях лопатей при подальшому переміщенні вже практично відсутні, однак при цьому слід брати до уваги, що при переїзді через нерівності грунту у верхній частині шахти виникають порівняно великі прискорення, причому ці прискорення звичайно відрізняються за величиною від прискорень, визначених розташованими поблизу грунту датчиками прискорень та нахилу Наступний варіант підвищення точності та надлишковості даних передбачає збільшення КІЛЬКОСТІ СВІТЛОВИХ бар'єрів і оптимальний їх розподіл у площині їхнього розміщення Шляхом оцінки кількох сигналів від сусідніх світлових бар'єрів можна додатково визначити профіль поверхні зернової маси і врахувати й обсяг або ж визначити й похилий середній рівень Розташовані у кутках шахти СВІТЛОВІ бар'єри дозволяють також точно визначати менші обсяги зернової маси на неповністю заповнених лопатях без використання ЗОВНІШНІХ або екстрапольованих значень нахилу шляхом визначення нахилів рівня зернової маси за сигналами сусідніх, поки що тимчасово затінених датчиків Оскільки у комп'ютері збиральної машини закладена інформація про вид та вологість зернового матеріалу, що збирається, то за певних умов для коригування викривлених через нерівності поверхні значень обсягу більш прийнятне використовувати кореляційну функцію, яка може зберігатися у пам'яті комп'ютера, наприклад, у формі таблиці або функції Через те що зерна зумовлюють грубу структуру поверхні зернової маси, а діаметр зерен кукурудзи, бобів, гороху досягає майже 1 см, то для одержання відтворюваних результатів виміру доцільно усереднювати положення поверхні зернової маси шляхом вибору діаметрів променевих пучків світлових бар'єрів Пучок променів повинен водночас охоплювати декілька зерен або об'єктів ВІДПОВІДНО порожня лопать повинна повністю затінювати світловий бар'єр своєю маючою відповідну висоту кромкою Для мінімізації впливу старіння або забруднення ЛІНІЙ світлових бар'єрів на точність вимірів доцільно зберігати у пам'яті комп'ютера максимальний світловий та мінімальний тіньовий сигнали і встановлювати поріг їх впізнання за середнім значенням екстремальних сигналів для СВІТЛОТІНЬОВИХ переходів, які визначають ВІДПОВІДНО НИ ЖНЄ І верхнє положення поверхонь зернової маси СВІТЛОВІ бар'єри можуть бути виконані з двох елементів, передавача та приймача, розташованих на протилежних сторонах шахти, або ж спареними з рефлектором на протилежній стороні, що спрощує монтаж світлових бар'єрів Винахід пояснюється фігурами креслень 1-6, Де - на фіг 1 показаний поздовжній розріз транспортної ділянки шахти, 52665 10 9,10 і розташовані за вікнами 13,14, що щільно хти, прилягають до стінок 4, 5 Поперечний перетин пучка променів світлового бар'єра 11 і приймаль- на фіг 3 схематично показаний нахилений до ної характеристики датчика переважно більший, першої осі об'єм зернової маси, ніж транспортовані об'єкти (зерна), що зумовлює - на фіг 4 схематично показаний нахилений до можливість одержання точного усередненого сигдругої осі об'єм зернової маси, налу для визначення СВІТЛО-ТІНЬОВОГО переходу - на фіг 5 схематично показаний нахилений до двох осей об'єм зернової маси, Далі, по обида боки транспортуючого ланцюга 7 показані два наступних світлових бар'єри 21,21 А, - на фіг 6 показана блок-схема вимірювальнорозташованих поблизу стінок 4,5, але на деякому го пристрою віддаленні від них, а пучки їхніх променів перебуНа фіг 1 показаний поздовжній розріз верхньої вають у тій же площині, що й промені першого свіділянки елеватора, що містить лопаті 8, встановтлового бар'єра 11 Таким чином, початки одиночлені на ланцюзі 7, натягнутому через ланцюгову них тіньових сигналів показують верхні положення зірочку 6 на верхній відхиляючий вал 3 з можливіповерхні завантаженого матеріалу К1.К2 у зоні стю руху ланцюга зі зміною напрямку угору або променів Часова або ж похідна від неї просторова вниз, причому кожна із лопатей 8 переміщає нагорізниця (DQ) положень повгерхні завантаженого ру зібраний врожай 15, зокрема, у вигляді зернової матеріалу К1.К2, віднесена до відстані між світломаси, яка розвантажується у верхній зоні повороту вими бар'єрами LA, вказує величину поперечного ланцюга Одиночні об'єми зернової маси на лопанахилу рівня у шахті тях 8 обмежені з боків та зовні прямокутною шахтою 1, а зсередини - перегородкою 2 Між обома Далі, різниця DL (фиг 1) між середнім значенбічними стінками розташований світловий бар'єр ням KM точних положень поверхні завантаженого 11 таким чином, що його світловий пучок є параматеріалу К1.К2 і її положенням у зоні першого лельним лопаті 8, яка проходить Світловий бар'єр світлового бар'єра 11, віднесена до половини ши11 переважно розташований у поперечному перерини шахти SB, дає величину поздовжнього нахитині шахти між внутрішньою 2 і зовнішньою 1 стінлу ками На фіг 3-5 показане використання обох вищеУ тій самій площині шахти, що й перший світназваних величин нахилу для точного визначення ловий бар'єр, або з деяким зміщенням у напрямі обсягу транспортованого матеріалу Якщо лопать подачі між внутрішньою 2 і зовнішньою 1 стінками повністю покрита транспортованим матеріалом, а розташовані ІНШІ СВІТЛОВІ бар'єри 21,21 А, причому поверхня матеріалу є суттєво плоскою, то ВІДПОВІїхні СВІТЛОВІ пучки проходять паралельно один ДНИЙ обсяг транспортованого матеріалу вираховуодному і перетинаються зі світловими пучками ється шляхом помноження площі поперечного пепершого світлового бар'єра 11 з можливим зміретину шахти Q на висоту завантаженого щенням у напрямі подачі матеріалу НМ у середині лопаті Отже, справа в основному полягає утому, щоб за одним із сигнаЗрозуміло, що при проходженні нижніми кромлів світлового бар'єра виміряти там локальну виками лопатей 8 одиночного світлового бар'єра 11 соту завантаження, а за взаємоположенням інших останній видає стартовий світловий сигнал, так що світлових бар'єрів та за їхніми сигналами полочасовий інтервал між стартовими фронтами світження поверхні завантаженого матеріалу визначалових сигналів при приблизно ПОСТІЙНІЙ ШВИДКОСТІ ти з використанням одержаних значень нахилів подачі матеріалу відповідає відстані AS між лопасередню висоту завантаження НМ у середині лотями 8, а ТІНЬОВІ інтервали, обумовлені прохопаті дженням зернової маси 15 та лопатей 8, дозволяють одержати відносну висоту завантаження КН На фіг 3 схематично показаний об'єм зернової разом із товщиною лопатей SD Якщо поверхня маси у шахті прямокутного поперечного перетину зернової маси є плоскою і паралельною світловоQ, шириною В та довжиною W Поверхня зернової му пучку світлового бар'єра, то шуканий обсяг зермаси є плоскою та горизонтальною, а передня 1 і нової маси одержують у вигляді добутку висоти и задня 2 стінки шахти нахилені тільки до осі X світзавантаження на площу поперечного перетину лового бар'єра 11 під кутом рі Вказаний об'єм пешахти Нахил лопаті відносно шахти і нахил шахти ретинає світловий бар'єр 11 у середині ширини до вертикалі не справляє ніякого впливу на визнашахти, причому після віднімання тіньового часу, чення цього обсягу Подальше підвищення точнозумовленого товщиною лопаті, за його значенням, сті вимірів забезпечує оцінка форми поверхні, при віднесеним до часу періоду, одержують висоту якій замість одного світлового бар'єра 11 викорисзавантаження КН Обидва світлових бар'єри товують величезну КІЛЬКІСТЬ паралельних світло21,21 А, розташовані між внутрішньою і зовнішвих бар'єрів 11* За різницею у часі проходження ньою стінками, показують практично в один і той цих бар'єрів зерновою зоною і, зокрема, за різниже час початок тіньової фази, оскільки верхні краї цею на початку тіньових періодів одержують проповерхні завантаженого матеріалу ОК перетинафіль поверхні, за формою якого визначають об'єм ють обидва світлових бар'єри одночасно, що вкау профільованій частині зує на відсутність нахилу до осі Y шахти, а висота завантаження КН, виміряна по першому світловоНа фіг 2 показаний розріз ІІ-ІІ транспортної му бар'єру, є також і середньою висотою заванташахти, на якому можна бачити бічні стінки 4 і 5, на ження НМ для середини лопаті яких розташовані елементи 11,12 світлового бар'єра, а саме, джерело інфрачервоного випроміНа фіг 4 показаний об'єм зернової маси у шахнювання 11 і фотодетектор 12 Зовні елементи ті, коли він нахилений до осі Y, паралельно якій світлового бар'єра закриті захисними кожухами проходять обидва світлових бар'єри 21,21А У цьо- на фіг 2 - розріз ІІ-ІІ транспортної ділянки ша 12 11 52665 му випадку положення К1.К2, детектовані обома значеньЩІЛЬНОСТІ і вологості матеріалу в значення світловими бар'єрами, є різними, а різниця в їхніх витрати сипкого матеріалу і загальної його КІЛЬКОположеннях DQ, віднесена до половини відстані СТІ за тривалий час його транспортування та у поLA між світловими бар'єрами, дає величину нахиточні значення для наступного визначення значень лу р2 Тому для визначення середньої висоти заурожаю по площах та для їх картографування, які вантаження НМ слід відкоригувати максимальну готуються або видаються оператору для керівницвеличину бічної висоти завантаження КН , вимірятва ної одиночними світловими бар'єрами 11, за переЯкщо використовують менше трьох вказаних вищенням нахилу і від неї відняти це перевищенсвітлових бар'єрів, то на вхід процесора підклюня, що дає формулу чають щонайменше один датчик прискорення/нахилу NS, сигнал якого використовується виHM=KH'-(DQxW)/(LAx2), щеописаним чином для корекції ВІДПОВІДНИХ даних тобто НМ дорівнює різниці між бічною висотою вимірів висоти зернової маси або для перерахунку завантаження КН і нахилу р2, помноженого на пой обсягів При цьому виникає проблема допусків на ловину довжини шахти W насипний кут, що вносить неточності і викривлення На фіг 5 показаний об'єм зернової маси у шаху визначення значень обсягу, які можна значно ті при її нахилі до двох осей х,у під кутами р і , р2 зменшити шляхом використання поправок, одерВІДПОВІДНО За різницею положень DQ країв К1.К2 жуваних з використанням вимірювальної техніки стосовно внутрішньої 1 і зовнішньої 2 стінок знову або емпірично, а також шляхом уведення їх у проодержують нахил р2, віднесений до половини відцесор у вигляді таблиць або функцій в залежності стані LA між світловими бар'єрами Легко зрозумівід виду зернової маси та й відносної вологості ти, що і тут середня висота завантаження НМ розраховується за бічною висотою завантаження КН , Якщо наведений вище пристрій оснащений виміряною одиночними світловими бар'єрами 11, щонайменше трьома світловими бар'єрами шляхом зменшення й на нахил р2, віднесений до 11,21,21А і, крім того, щонайменше одним датчиполовини довжини шахти W, так що і тут дійсна ком нахилу NS, що вимірює нахил у напрямі світформула лових бар'єрів, то шляхом порівняння результатів визначення обсягу з використанням сигналів декіHM=KH"-(DQxW)/(LAx2) лькох світлових бар'єрів 11 і датчика нахилу NS Зазначена формула відноситься і до фіг З, можна визначити поправки при різних співвіднооскільки там поправочний коефіцієнт дорівнює шеннях величин, зокрема також і при ЗМІНІ нахилу нулю Потім ЦІ поправки готують у вигляді таблиць або Зрозуміло, що у випадках інших положень свіфункцій для спрощених пристроїв з незначною тлових бар'єрів, інших кутів нахилу лопатей до осі КІЛЬКІСТЮ світлових бар'єрів і одним датчиком нашахти, неповного завантаження лопатей визнахилу NS та використовують у них чення обсягу провадиться подібним же чином Сигнали світлових бар'єрів в аналоговій формі Вибране тут розташування світлових бар'єрів подають безпосередньо в аналого-цифровий пемає перевагу майже одночасного охоплення поверетворювач AD, перетворюючий їх у цифрову форхні, так що за відносно короткий проміжок часу, рму, причому декілька сигналів періодично один за протягом якого мають початок усі три тіньових одним зчитуються мультиплексором МРХ Для засигнали, навряд чи має місце зміщення поверхні безпечення максимальної точності визначення Очевидно, що за допомогою ззовні одержаних часу проходження світлових бар'єрів краями лопасигналів про кути нахилу р і , р2 та сигналу про тей і межами зернової маси визначають поточні висоту завантаження КН" також легко можна вимаксимальні та мінімальні значення світлових сиграхувати середню висоту завантаження НМ Проте налів від одиночних світлових бар'єрів, а потім слід брати до уваги проблеми різних прискорень визначають порогове значення сигналу для кожнона датчику нахилу та у зоні вимірів у шахті, а також го одиночного світлового бар'єра, при перетині уповільнень у встановленні рівня зернової маси якого має місце перехід сигналу від тіньового до при зміщенні вектора прискорення і вносити ВІДПОсвітлого або навпаки, і визначають ВІДПОВІДНИЙ ВІДНІ поправки цьому переходові момент часу Саме собою зрозуНа фіг 6 показана блок-схема пристрою, що міло, генерування та порівняння порогових сигнаскладається з програмованого процесора СР, на лів можна здійснювати в аналоговій формі, а геневходи якого надходять сигнали з датчиків світлорований блоком порівняння цифровий сигнал вих бар'єрів 21,21А,11, і який, крім того, за запитаподавати на цифровий вхід блока оцінки Обробка ми забезпечується такими даними, що відносяться сигналів подана схематично для одного з них При до ВІДПОВІДНОГО продукту, як питома вага, вологоцьому останнє максимальне значення позначене вміст, вид зернової культури, що може здійснювасимволом Smax, а останнє мінімальне значення тися відомим чином через ЛІНІЮ даних, пристрій символом Smm, визначене за ними порогове зназв'язку, клавіатуру або за допомогою датчиків, чення - символом SW, причому це порогове зназокрема, вимірювача ЩІЛЬНОСТІ DM І вологоміра чення через короткі проміжки часу порівнюють зі FM значенням сигналу у СВІТЛІЙ ДІЛЯНЦІ, а стан світло або тінь визначають за результатами порівняння Уведені від світлових бар'єрів сигнали порівнюються один з одним за тривалістю їхніх світлоЗамість СПІВВІСНИХ одиночних світлових бар'євих і тіньових фаз і/або за відносними часовими рів або додатково до них можуть бути передбачені положеннями та тривалістю за допомогою сигнадва паралельних світлових бар'єри 11 А,11 В, як лів датчика тактових імпульсів CL і, як зазначено, показано на фіг 1 їхні сигнали після усереднення перераховуються з урахуванням уведених у проможна використовувати як сигнал одного одиночцесор геометричних даних шахти та виміряних 13 52665 14 ного світлового бар'єра Крім того, при визначенні нахил Якщо СВІТЛОВІ бар'єри утворені парами світнезначного об'єму на одній неповністю завантажелових бар'єрів 11 А,11 В,21,21 А, то надлишковість ній транспортованим матеріалом лопаті більш сигналів висоти завантаження дає переважну моприйнятне вимірювати проходження нижньої кромжливість подвійного визначення об'єму і засноваки лопаті через СВІТЛОВІ бар'єри та визначати й ного на ньому усереднення ТОВ Міжнародний науковий комітет вул Артема 77 м Київ 04050 Україна (044)236-47-24
ДивитисяДодаткова інформація
Назва патенту англійськоюMeasuring device of the loadvolume of an elevator
Назва патенту російськоюУстройство для измерения расхода транспортируемого материала в элеваторе
МПК / Мітки
МПК: B65G 17/00, A01D 61/00
Мітки: пристрій, виміру, елеваторі, витрати, транспортованого, матеріалу
Код посилання
<a href="https://ua.patents.su/7-52665-pristrijj-dlya-vimiru-vitrati-transportovanogo-materialu-v-elevatori.html" target="_blank" rel="follow" title="База патентів України">Пристрій для виміру витрати транспортованого матеріалу в елеваторі</a>
Спосіб визначення витрати транспортованого газу
Номер патенту: 39291
Опубліковано: 15.06.2001
Автори: Челомбітько Георгій Олександрович, Коток Валерій Борисович, Шваченко Ігор Іванович, Вечерік Роман Леонідович, Бантюков Сергій Євгенович, Рудник Анатолій Андрійович, Васильєв Анатолій Миколайович, Тевяшев Андрій Димитрович
Мітки: витрати, транспортованого, газу, спосіб, визначення
Формула / Реферат:
Спосіб визначення витрати транспортованого газу, який включає вимірювання на вході та виході нагнітача тиску - рвх, рвпх, температури газу -tвх. tвих та частоти обертання нагнітача - n, який відрізняється тим, що попередньо для нагнітача, витрата газу через який визначають, апроксимують паспортні характеристики έ-=f(Qпр), де έ - ступінь стискання газу, а Qпр - приведена витрата газу через нагнітач, для усіх, існуючих в...
Спосіб виміру витрати
Номер патенту: 33605
Опубліковано: 15.02.2001
Автори: Лисцов Сергій Олегович, Верховецький Миколай Олексійович, Соколов Володимир Ілліч, Мінін Сергій Олександрович, Коваленко Алім Олексійович, Ковріжкін Юрій Леонідович
Мітки: виміру, спосіб, витрати
Текст:
...Схема пристрою, за допомогою ознак якого характеризується спосіб виміру витрати, що дозволить підвищити точність виміру, наведена у доданих кресленнях фіг. 1 та фіг. 2. На фіг. 1 зображений пристрій у каналі. На фіг. 2. зображене положення приймачів повного тиску по перетину каналу. Пристрій 1, встановлений в каналі 2, має приймачі 3,4,5 повного тиску, розташовані на центральних координатах рівновеликих частин 6, 7, 8 живого перетину потоку....
Спосіб виміру витрати повітря, що проходить через повітряно-реактивний двигун
Номер патенту: 31969
Опубліковано: 15.12.2000
Автори: Козлов Володимир Вікторович, Панін Владислав Вадимович, Кулик Микола Сергійович, Степаненко Володимир Миколайович, Дмитрієв Сергій Олексійович, Ратинський Валерій Валерійович
Мітки: проходить, повітря, витрати, виміру, двигун, повітряно-реактивний, спосіб
Текст:
...На фіг. І показана схема каналу ПЧ повітрезабірника та перерізів мірної ділянки. На фіг.2 представлена схема пристрою, що реалізує спосіб. На фіг.З показаний конфузор, що моделює повітрезабІрник, на якому проводилася дослідна перевірка способу. Для обгрунтування формули (5) використовувалася фіг.І, на якій 1 - повітрезабІрник; 2 - кок двигуна; п максимальний переріз мірної ділянки; в - мінімальний переріз мірної ділянки. Витрата повітря...
Спосіб фрідмана виміру товщини стінок порожнистих виробів із немагнітного матеріалу
Номер патенту: 12095
Опубліковано: 25.12.1996
Автор: Фрідман Борис Петрович
Мітки: порожнистих, стінок, спосіб, матеріалу, виробів, немагнітного, товщини, виміру, фрідмана
Формула / Реферат:
1. Способ измерения толщины стенок полых изделий из немагнитного материала по авт.св. № 937996, отличающийся тем, что, с целью расширения области использования за счет контроля также и функционирующих объектов, заполненных рабочей средой, порошкообразный магнитопроводящий агент совместно с жидкими фракциями перед введением во внутреннюю полость контролируемого объекта помещают в эластичную герметизированную тонкостенную оболочку из...
Пристрій для транспортування сипучого матеріалу самопливом
Номер патенту: 1608
Опубліковано: 15.01.2003
Автор: Абрамов Микола Васильович
МПК: B65G 54/00, B65G 53/00, B65G 11/00
Мітки: транспортування, матеріалу, самопливом, сипучого, пристрій
Формула / Реферат:
1. Пристрій для транспортування сипучого матеріалу самопливом, який має трубопровід, його дно виконано рухомим у вигляді безперервної стрічки з можливістю поступального переміщення, який відрізняється тим, що трубопровід з рухомим дном розташований нахилено, рухоме дно розташоване по максимальній ширині горизонтального перерізу в замкнутій геометричній фігурі поперечного перерізу трубопроводу-самопливу і має ділянку накопичення критичної маси...
Попередній патент: Спосіб позапічної обробки чавуну магнієм
Наступний патент: Портативний пристрій для передачі даних і кріпильний елемент
Випадковий патент: Блок керування системою кондиціонування