Спосіб автоматизованого розрахунку електричних кіл методом миттєвої потужності
Номер патенту: 55874
Опубліковано: 27.12.2010
Автори: Родькін Дмитро Йосипович, Калінов Андрій Петрович, Малякова Марія Сергіївна

Формула / Реферат
Спосіб автоматизованого розрахунку електричних кіл методом миттєвої потужності, який включає автоматизований алгоритм дискретної згортки двох рядів, за допомогою якого формують складові миттєвої потужності на елементах схеми заміщення електротехнічного пристрою за відомими значеннями вхідних змінних, який відрізняється тим, що дозволяє формувати символьні вирази миттєвої потужності на електричних елементах схеми заміщення електротехнічного пристрою, дозволяє формувати та розв'язувати рівняння балансів складових миттєвої потужності для вирішення прямої задачі розв'язання електричних кіл, коли за відомими вхідними напругами та параметрами схеми заміщення знаходяться струми контурів.
Текст
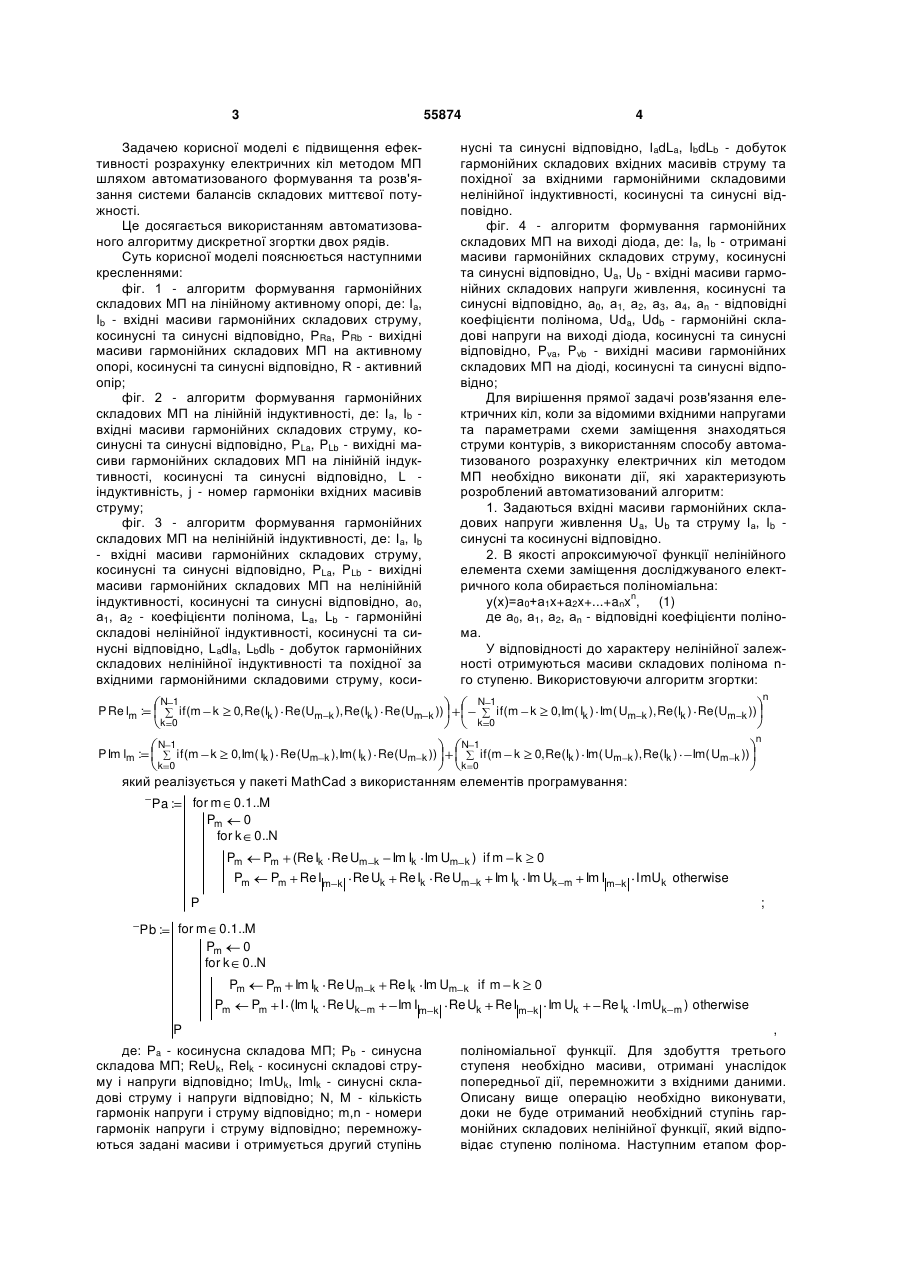
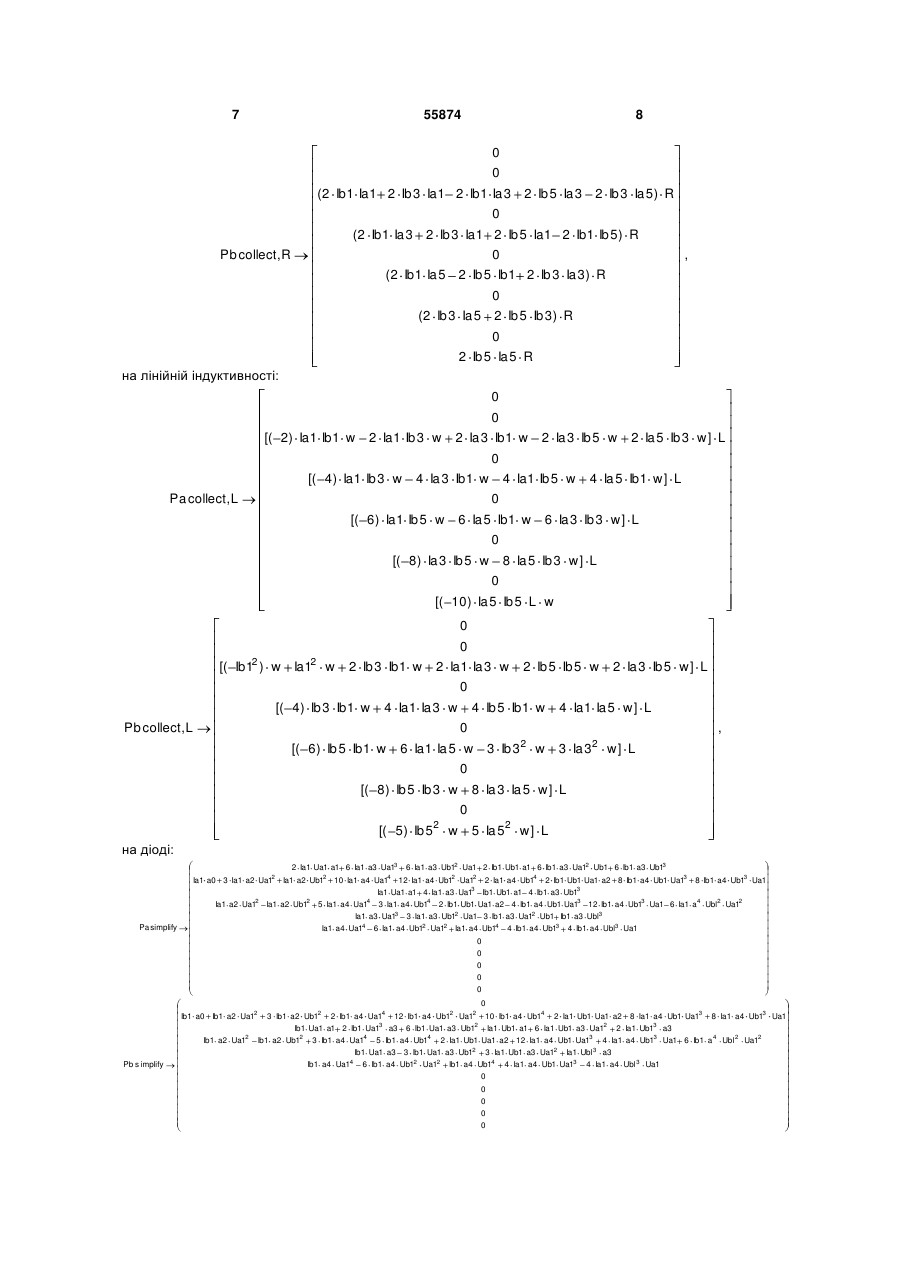
Спосіб автоматизованого розрахунку електричних кіл методом миттєвої потужності, який включає автоматизований алгоритм дискретної згортки двох рядів, за допомогою якого формують складо 3 55874 Задачею корисної моделі є підвищення ефективності розрахунку електричних кіл методом МП шляхом автоматизованого формування та розв'язання системи балансів складових миттєвої потужності. Це досягається використанням автоматизованого алгоритму дискретної згортки двох рядів. Суть корисної моделі пояснюється наступними кресленнями: фіг. 1 - алгоритм формування гармонійних складових МП на лінійному активному опорі, де: Іа, Іb - вхідні масиви гармонійних складових струму, косинусні та синусні відповідно, PRa, PRb - вихідні масиви гармонійних складових МП на активному опорі, косинусні та синусні відповідно, R - активний опір; фіг. 2 - алгоритм формування гармонійних складових МП на лінійній індуктивності, де: Іа, Іb вхідні масиви гармонійних складових струму, косинусні та синусні відповідно, PLa, PLb - вихідні масиви гармонійних складових МП на лінійній індуктивності, косинусні та синусні відповідно, L індуктивність, j - номер гармоніки вхідних масивів струму; фіг. 3 - алгоритм формування гармонійних складових МП на нелінійній індуктивності, де: Іа, Іb - вхідні масиви гармонійних складових струму, косинусні та синусні відповідно, PLa, PLb - вихідні масиви гармонійних складових МП на нелінійній індуктивності, косинусні та синусні відповідно, а0, а1, а2 - коефіцієнти полінома, La, Lb - гармонійні складові нелінійної індуктивності, косинусні та синусні відповідно, Ladla, Lbdlb - добуток гармонійних складових нелінійної індуктивності та похідної за вхідними гармонійними складовими струму, косиP Re lm : P Im lm : N 1 if(m k нусні та синусні відповідно, IadLa, IbdLb - добуток гармонійних складових вхідних масивів струму та похідної за вхідними гармонійними складовими нелінійної індуктивності, косинусні та синусні відповідно. фіг. 4 - алгоритм формування гармонійних складових МП на виході діода, де: Іа, Іb - отримані масиви гармонійних складових струму, косинусні та синусні відповідно, Ua, Ub - вхідні масиви гармонійних складових напруги живлення, косинусні та синусні відповідно, а0, а1, а2, а3, а4, аn - відповідні коефіцієнти полінома, Uda, Udb - гармонійні складові напруги на виході діода, косинусні та синусні відповідно, Pva, Pvb - вихідні масиви гармонійних складових МП на діоді, косинусні та синусні відповідно; Для вирішення прямої задачі розв'язання електричних кіл, коли за відомими вхідними напругами та параметрами схеми заміщення знаходяться струми контурів, з використанням способу автоматизованого розрахунку електричних кіл методом МП необхідно виконати дії, які характеризують розроблений автоматизований алгоритм: 1. Задаються вхідні масиви гармонійних складових напруги живлення Ua, Ub та струму Іа, Іb синусні та косинусні відповідно. 2. В якості апроксимуючої функції нелінійного елемента схеми заміщення досліджуваного електричного кола обирається поліноміальна: у(х)=а0+а1x+a2x+...+anxn, (1) де а0, а1, а2, аn - відповідні коефіцієнти полінома. У відповідності до характеру нелінійної залежності отримуються масиви складових полінома nго ступеню. Використовуючи алгоритм згортки: N 1 0, Re(Ik ) Re(Um k ), Re(Ik ) Re(Um k )) k 0 N 1 4 if(m k 0,Im( Ik ) Im( Um k ), Re(Ik ) Re(Um k )) k 0 N 1 0,Im( Ik ) Re(Um k ), Im( Ik ) Re(Um k )) k 0 n if(m k n if(m k k 0 0, Re(Ik ) Im( Um k ), Re(Ik ) Im( Um k )) який реалізується у пакеті MathCad з використанням елементів програмування: for m 0.1..M Pm 0 for k 0..N Pa : Pm Pm (Re Ik Re Um Pm Pm Re I m k k Re Uk Im Ik Im Um k ) if m k Re Ik Re Um k 0 Im Ik Im Uk m Im I m k I mUk otherwise P Pb : ; for m 0.1..M Pm 0 for k 0..N Pm Pm Pm Im Ik Re Um Pm I (Im Ik Re Uk k m Re Ik Im Um Im I m P де: Pa - косинусна складова МП; Pb - синусна складова МП; ReUk, Relk - косинусні складові струму і напруги відповідно; ImUk, Imlk - синусні складові струму і напруги відповідно; N, М - кількість гармонік напруги і струму відповідно; m,n - номери гармонік напруги і струму відповідно; перемножуються задані масиви і отримується другий ступінь k k if m k Re Uk Re I m 0 k Im Uk Re Ik I mUk m) otherwise , поліноміальної функції. Для здобуття третього ступеня необхідно масиви, отримані унаслідок попередньої дії, перемножити з вхідними даними. Описану вище операцію необхідно виконувати, доки не буде отриманий необхідний ступінь гармонійних складових нелінійної функції, який відповідає ступеню полінома. Наступним етапом фор 5 55874 мування n-го ступеня поліноміальної функції є множення отриманих масивів необхідних ступенів складових нелінійної функції на відповідні сталі коефіцієнти. Підсумовуючи отримані вирази, отримуємо (у(х))а, (у(х))b - дійсну і уявну гармонійні складові функції, що описує нелінійну залежність, відповідно. 3. Отримуються символьні та чисельні вирази складових МП на елементах схеми заміщення, та визначаються параметри досліджуваного кола, а саме шукані струми контурів, шляхом складання та вирішення системи рівнянь балансу складових МП на джерелі живлення та елементах схеми заміщення досліджуваного електричного кола: J P0 J Pka P0 Rj; j 1 I Pka Rj Pka Li ; (2) j 1 J j 1 Pkb i 1 I i 1 Pkb Rj Pkb Li , де: P0, Pka, Pkb - активна потужність, косинусні та синусні складові миттєвої потужності джерела живлення; J P0 Rj, j 1 J Pka Rj, j 1 J Pkb Rj - суми постійної, j 1 косинусної та синусної складових миттєвої потужності за j-ми активними елементами схеми заміщення; J Pka Li, j 1 J Pkb Li - суми косинусної та синус j 1 ної складових миттєвої потужності за і-ми індуктивними елементами схеми заміщення; a, b – індекси, що позначають косинусні та синусні складові МП відповідно; I - кількість активних опорів в схемі заміщення; J - кількість індуктивностей в схемі заміщення; k - номер гармоніки МП. (2 Ia12 2 Ib12 6 МП на різних елементах електричного кола визначається по-різному: На джерелі живлення: ps(t)=u(t)i(t), (3) на лінійній індуктивності L: d(i( t )) (4) pL ( t ) e( t )i( t ) L i( t ), dt на лінійному активному опорі R: iR ( t ) e( t )i( t ) (i( t ))2 R, (5) на нелінійній індуктивності: d(i( t )L(i)) pL ( t ) e( t )i( t ) i( t ), (6) dt де L(i) - залежність кривої намагнічування від струму; на нелінійному напівпровідниковому елементі: (7) p ( t ) u(i)i( t ), де u(i) - ВАХ напівпровідникового елементу (діод). на лінійній ємності С: 1 (8) PC ( t ) I( t ) I( t )dt; C на нелінійній ємності С: 1 (9) PC( t ) ( t ) I( t ) I( t )dt; C(i) 1 (10) PC(i) ( t ) I( t ) ( t )dt. C(i) Користуючись виразами (2-10) та алгоритмом дискретної згортки, формуються символьні вирази складових МП на елементах схеми заміщення досліджуваного електричного кола: на лінійному активному опорі: 2 Ia 32 2 Ib 32 0 2 Ia 52 2 Ib 52 ) R (Ia12 Ib12 2 Ia1 Ia 3 2 Ib 3 Ib1 2 Ia 3 Ia 5 2 Ib 5 Ib 3) R 0 (2 Ia1 Ia 3 2 Ib 3 Ib1 2 Ia1 Ia 5 2 Ib 5 Ib1) R Pa collect, R 0 (2 Ia1 Ia 5 2 Ib 5 Ib1 Ia 32 Ib 32 ) R 0 (2 Ia 3 Ia 5 2 Ib 5 Ib 3) R 0 (Ia 52 Ib 52 ) R 7 55874 8 0 0 (2 Ib1 Ia1 2 Ib 3 Ia1 2 Ib1 Ia 3 2 Ib 5 Ia 3 2 Ib 3 Ia 5) R 0 ( 2 Ib1 Ia 3 2 Ib 3 Ia1 2 Ib 5 Ia1 2 Ib1 Ib 5) R 0 (2 Ib1 Ia 5 2 Ib 5 Ib1 2 Ib 3 Ia 3) R 0 (2 Ib 3 Ia 5 2 Ib 5 Ib 3) R 0 2 Ib 5 Ia 5 R Pb collect, R , на лінійній індуктивності: 0 0 [( 2) Ia1 Ib1 w 2 Ia1 Ib 3 w 2 Ia 3 Ib1 w 2 Ia 3 Ib 5 w 2 Ia 5 Ib 3 w ] L 0 Pa collect, L [( 4) Ia1 Ib 3 w 4 Ia 3 Ib1 w 4 Ia1 Ib 5 w 4 Ia 5 Ib1 w ] L 0 [( 6) Ia1 Ib 5 w 6 Ia 5 Ib1 w 6 Ia 3 Ib 3 w ] L 0 [( 8) Ia 3 Ib 5 w 8 Ia 5 Ib 3 w ] L 0 [( 10) Ia 5 Ib 5 L w 0 0 [( Ib12 ) w Ia12 w 2 Ib 3 Ib1 w [( 4) Ib 3 Ib1 w Pb collect, L 2 Ia1 Ia 3 w 0 4 Ia1 Ia 3 w 2 Ib 5 Ib 5 w 4 Ib 5 Ib1 w 2 Ia 3 Ib 5 w ] L 4 Ia1 Ia 5 w ] L , 0 6 Ia1 Ia 5 w 3 Ib 32 w 3 Ia 32 w ] L 0 [( 8) Ib 5 Ib 3 w 8 Ia 3 Ia 5 w ] L 0 2 [( 5) Ib 5 w 5 Ia 52 w ] L [( 6) Ib 5 Ib1 w на діоді: 2 Ia1 Ua1 a1 6 Ia1 a3 Ua13 6 Ia1 a3 Ub12 Ua1 2 Ib1 Ub1 a1 6 Ib1 a3 Ua12 Ub1 6 Ib1 a3 Ub13 Ia1 a0 3 Ia1 a2 Ua12 Ia1 a2 Ub12 10 Ia1 a4 Ua14 12 Ia1 a4 Ub12 Ua12 2 Ia1 a4 Ub14 2 Ib1 Ub1 Ua1 a2 8 Ib1 a4 Ub1 Ua13 Ia1 a2 Ua12 Ia1 a2 Ub12 8 Ib1 a4 Ub13 Ua1 Ia1 Ua1 a1 4 Ia1 a3 Ua13 Ib1 Ub1 a1 4 Ib1 a3 Ub13 5 Ia1 a4 Ua14 3 Ia1 a4 Ub14 2 Ib1 Ub1 Ua1 a2 4 Ib1 a4 Ub1 Ua13 12 Ib1 a4 Ub13 Ua1 6 Ia1 a4 Ubl2 Ua12 Ia1 a3 Ua13 3 Ia1 a3 Ub12 Ua1 3 Ib1 a3 Ua12 Ub1 Ib1 a3 Ubl3 Ia1 a4 Ua14 Pa simplify 6 Ia1 a4 Ub12 Ua12 Ia1 a4 Ub14 0 0 0 4 Ib1 a4 Ub13 4 Ib1 a4 Ubl3 Ua1 0 0 Ib1 a0 Ib1 a2 Ua12 3 Ib1 a2 Ub12 2 Ib1 a4 Ua14 3 Ib1 a2 Ua12 Pb s implify 12 Ib1 a4 Ub12 Ua12 0 10 Ib1 a4 Ub14 2 Ia1 Ub1 Ua1 a2 8 Ia1 a4 Ub1 Ua13 8 Ia1 a4 Ub13 Ua1 Ib1 Ua1 a1 2 Ib1 Ua1 a3 6 Ib1 Ua1 a3 Ub1 Ia1 Ub1 a1 6 Ia1 Ub1 a3 Ua12 2 Ia1 Ub13 a3 Ib1 a2 Ub12 3 Ib1 a4 Ua14 5 Ib1 a4 Ub14 2 Ia1 Ub1 Ua1 a2 12 Ia1 a4 Ub1 Ua13 4 Ia1 a4 Ub13 Ua1 6 Ib1 a 4 Ubl 2 Ua12 Ib1 a4 Ua14 2 Ib1 Ua1 a3 3 Ib1 Ua1 a3 Ub12 3 Ia1 Ub1 a3 Ua12 Ia1 Ubl 3 a3 6 Ib1 a4 Ub12 Ua12 Ib1 a4 Ub14 4 Ia1 a4 Ub1 Ua13 4 Ia1 a4 Ubl 3 Ua1 0 0 0 0 0 9 Зробивши необхідні перетворення з урахуванням параметрів R і L, отримуємо всі необхідні рівняння в чисельному або символьному вигляді що дозволяють розв'язати пряму або обернену задачу 55874 10 (визначення параметрів схеми заміщення за відомими складовими струмів та напруги джерела живлення) аналізу електричних кіл. 11 55874 12 13 Комп’ютерна верстка А. Крулевський 55874 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for automated calculation of electric circuits by method of instantaneous power
Автори англійськоюKalinov Andrii Petrovych, Maliakova Maria Serhiivna
Назва патенту російськоюСпособ автоматизированного расчета электрических цепей методом мгновенной мощности
Автори російськоюКалинов Андрей Петрович, Малякова Мария Сергеевна
МПК / Мітки
МПК: G01R 21/00
Мітки: електричних, автоматизованого, розрахунку, спосіб, методом, потужності, кіл, миттєвої
Код посилання
<a href="https://ua.patents.su/7-55874-sposib-avtomatizovanogo-rozrakhunku-elektrichnikh-kil-metodom-mittehvo-potuzhnosti.html" target="_blank" rel="follow" title="База патентів України">Спосіб автоматизованого розрахунку електричних кіл методом миттєвої потужності</a>
Спосіб автоматизованого вимірювання в`язкості біологічних рідин безелектродним методом
Номер патенту: 35766
Опубліковано: 10.10.2008
Автори: Слободян Оксана Всеволодівна, Пішак Василь Павлович, Шаплавський Микола Володимирович, Григоришин Петро Михайлович
МПК: A61B 5/00
Мітки: спосіб, методом, біологічних, рідин, в'язкості, автоматизованого, вимірювання, безелектродним
Формула / Реферат:
Спосіб автоматизованого вимірювання в'язкості біологічних рідин безелектродним методом шляхом вимірювання параметрів рідини, що рухається через контур певного об'єму, який відрізняється тим, що додатково проводять автоматичну комп'ютерну реєстрацію напруги на виході приладу (вимірювач добротності ВМ-560) та однозначно її переводять у добротність коливального контуру, а вимірювання в'язкості проводять за графічною залежністю коливального...
Пристрій передачі електричних сигналів потужності з змінними частотами та фазами від нерухомого блока до блока, що обертається
Номер патенту: 41900
Опубліковано: 15.10.2001
Автори: Пуже Жан-П'єр Гастон, Роже Крістіан, Жирар Франсі
МПК: H01F 38/00
Мітки: нерухомого, змінними, обертається, електричних, частотами, потужності, фазами, сигналів, передачі, пристрій, блока
Формула / Реферат:
1. Устройство передачи электрических сигналов мощности с переменными частотами и фазами от неподвижного блока к вращающемуся блоку, включающее вращающийся трансформатор, первая часть магнитопровода которого является неподвижной, содержит, первичную обмотку и размещена в неподвижном блоке, а вторая часть магнитопровода, выполненная с возможностью вращения, содержит вторичную обмотку и закреплена во вращающемся блоке, отличающееся тем, что...
Спосіб розігрування призів миттєвої лотереї
Номер патенту: 55275
Опубліковано: 15.06.2005
Автор: Ложенко Георгій Олександрович
Мітки: спосіб, миттєвої, лотереї, призів, розігрування
Формула / Реферат:
Винахід відноситься до розділення сипких матеріалів за розміром часток і може бути використаний на будівельних, гірничо-збагачувальних, абразивних підприємствах. Сито містить чарункову просіюючу поверхню, просіююча поверхня виконана двошаровою, верхній шар з чарунками, виконаний із гуми формою, відповідною формі нижнього шару, який має у своїй структурі армуючі нитки, які безперервно у рядах чарунок, за виключенням крайніх рядів, огинають...
Спосіб визначення швидкості поширення електричних імпульсів у електричних лініях зв’язку
Номер патенту: 35262
Опубліковано: 10.09.2008
Автори: Ніколаєв Андрій Володимирович, Скрипник Юрій Олексійович, Кузнєцов Олександр Юрійович
МПК: H04B 3/46
Мітки: швидкості, електричних, лініях, визначення, поширення, спосіб, зв'язку, імпульсів
Формула / Реферат:
Спосіб визначення швидкості поширення електричних імпульсів у електричних лініях зв'язку, при якому підключають випробувану лінію до виходу кільцевого генератора імпульсів, збуджують його пусковим імпульсом, отриманий імпульс посилають у випробувану лінію, приймають відбитий імпульс і ним знову збуджують по кільцю генератор імпульсів, формують періодичну послідовність зондувальних імпульсів, вимірюють частоту проходження зондувальних...
Спосіб регулювання реактивної потужності синхронних приводних електродвигунів компресорної станції однакової номінальної потужності
Номер патенту: 6197
Опубліковано: 29.12.1994
Автори: Криворучко Світлана Марківна, Осадчук Юрій Григорович, Вайнер Аркадій Йосипович, Кобелянський Анатолій Тимофійович, Алексєєнков Микола Миколайович, Кучеров Андрій Петрович, Лазаревич Галина Юхимівна, Лазаревич Генадій Генадійович, Осадчій Виктор Порфірьйович, Ілієнко Микола Гнатович
МПК: F04D 27/00
Мітки: однакової, приводних, реактивної, потужності, станції, компресорної, номінальної, регулювання, синхронних, електродвигунів, спосіб
Формула / Реферат:
(57) Способ регулирования реактивной мощности синхронных приводных электродвигателей компрессорной станции равной номинальной мощности, включающий измерение реактивной и активной мощностей, определение полной мощности каждого двигателя и сравнение полной мощности каждого двигателя с граничными значениями, отличающийся тем, что дополнительно измеряют или задают требуемую реактивную мощность электрической сети, измеряют для каждого синхронного...
Попередній патент: Спосіб вимірювання параметрів руху і вібрації
Наступний патент: Спосіб діагностики порушень статевого розвитку у хлопців
Випадковий патент: Спосіб виявлення кровоносних судин ланок мікроциркуляторного русла паренхіматозних органів ссавців