Спосіб вимірювання параметрів руху і вібрації
Номер патенту: 55873
Опубліковано: 27.12.2010
Автори: Коджеспірова Інна Федорівна, Пилипенко Олег Вікторович, Привалов Євген Миколайович, Горєв Микола Борисович
Формула / Реферат
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти і утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом з їхньою наступною математичною обробкою, який відрізняється тим, що зазначену інтерференцію здійснюють у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі, квадратурні сигнали виділяють за допомогою диференціювання струмів напівпровідникових детекторів, з'єднаних з зазначеними зондами, швидкість об'єкта ![]() визначаюь за формулою
визначаюь за формулою
 ,
,
де:
![]() - довжина хвилі електромагнітного випромінювання генератора у вільному просторі;
- довжина хвилі електромагнітного випромінювання генератора у вільному просторі;
![]() - перша і друга похідні за часом від струму напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (детектор 1);
- перша і друга похідні за часом від струму напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (детектор 1);
![]() - перша і друга похідні за часом від струму напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (детектор 2);
- перша і друга похідні за часом від струму напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (детектор 2);
![]() - відношення коефіцієнта пропорційності між квадратом модуля напруженості електричного поля і струмом детектора 2 до коефіцієнта пропорційності між квадратом модуля напруженості електричного поля і струмом детектора 1,
- відношення коефіцієнта пропорційності між квадратом модуля напруженості електричного поля і струмом детектора 2 до коефіцієнта пропорційності між квадратом модуля напруженості електричного поля і струмом детектора 1,
а переміщення об'єкта знаходять інтегруванням швидкості.
Текст
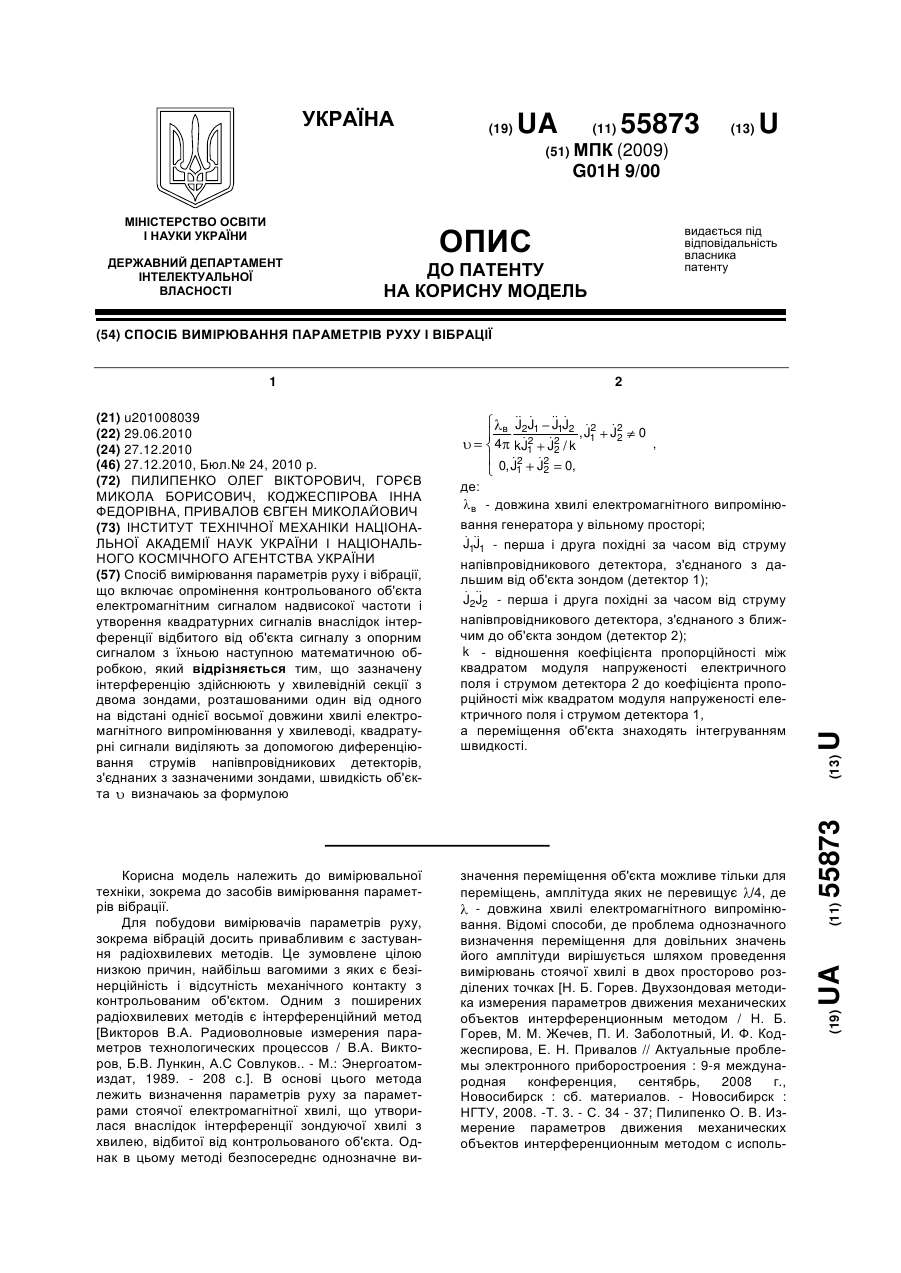
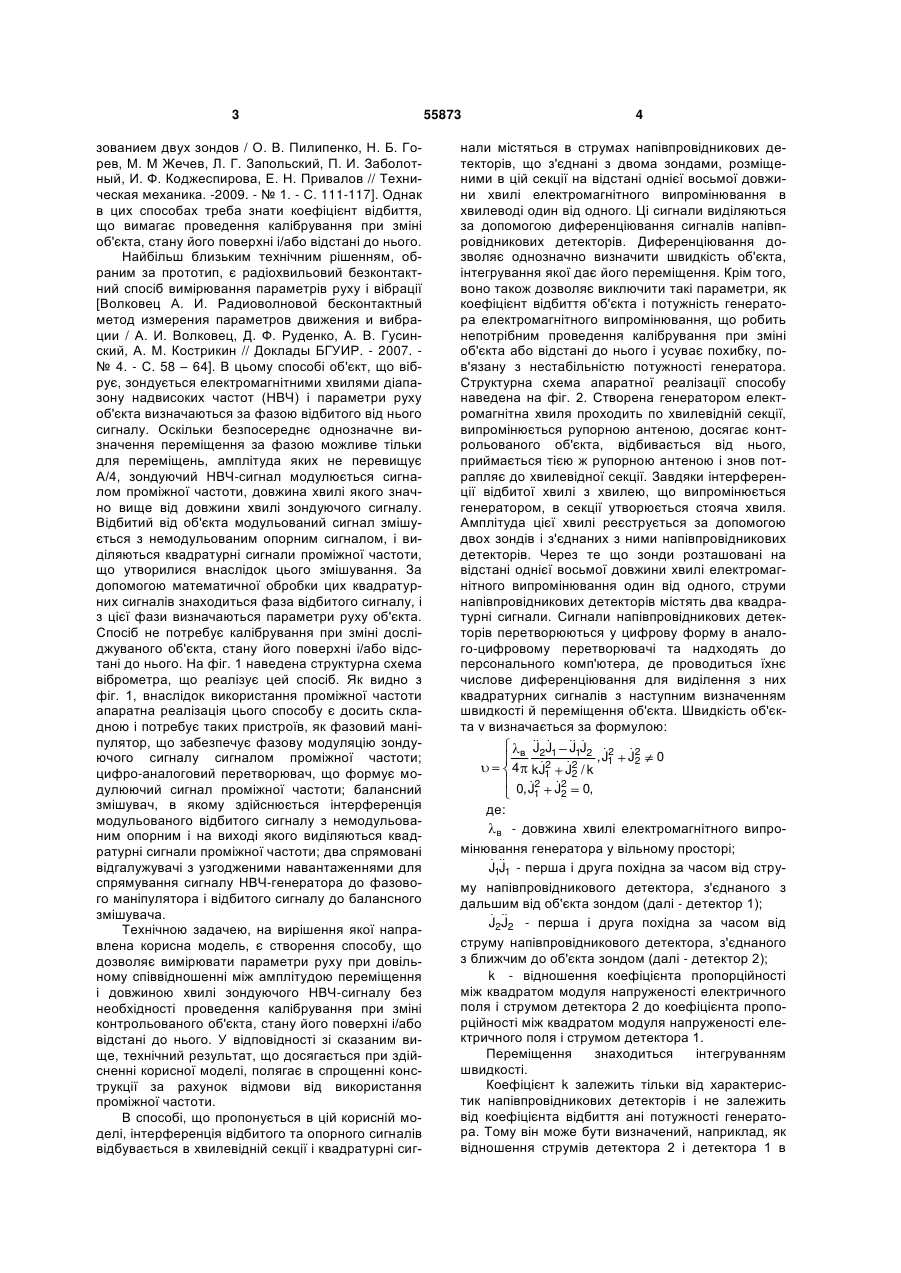
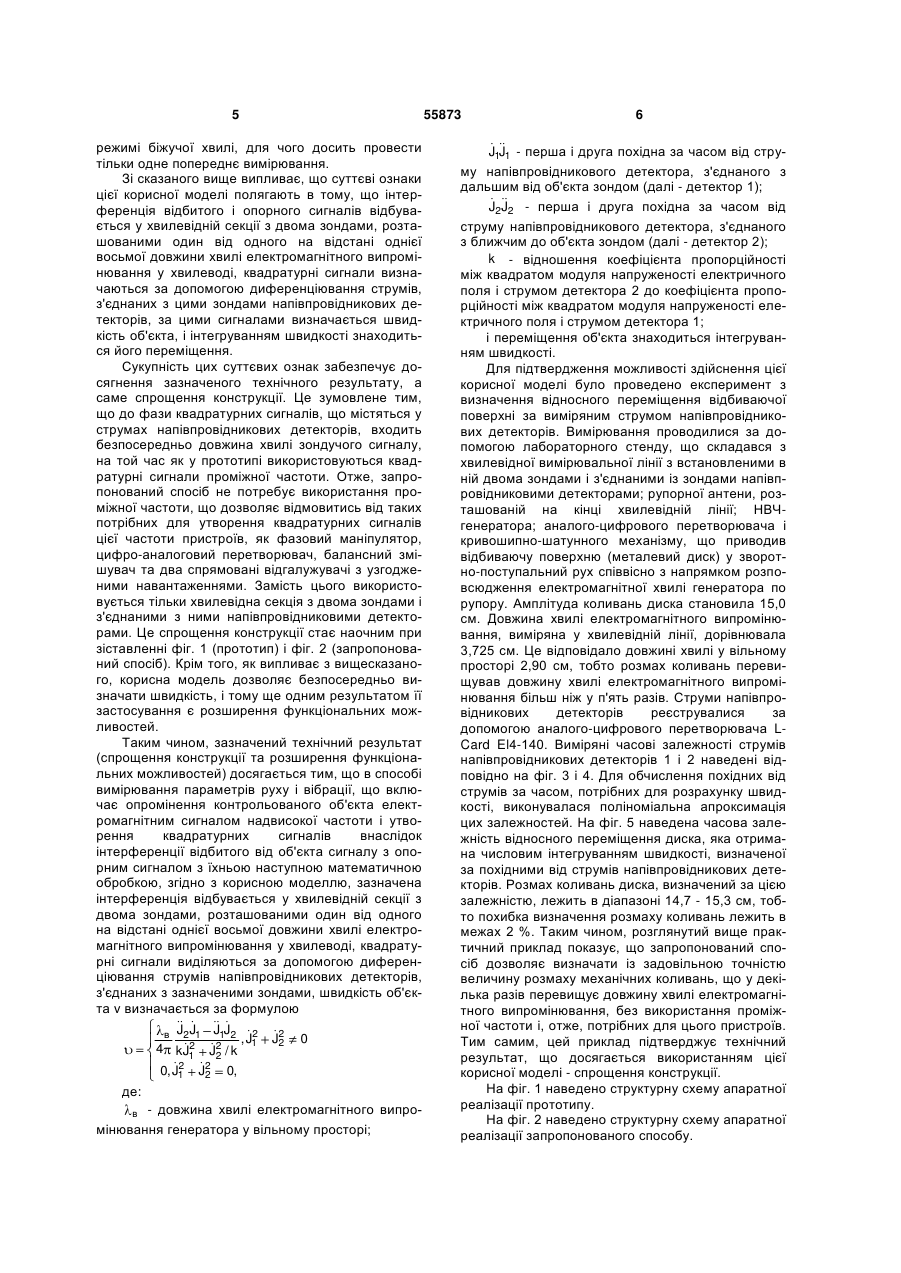
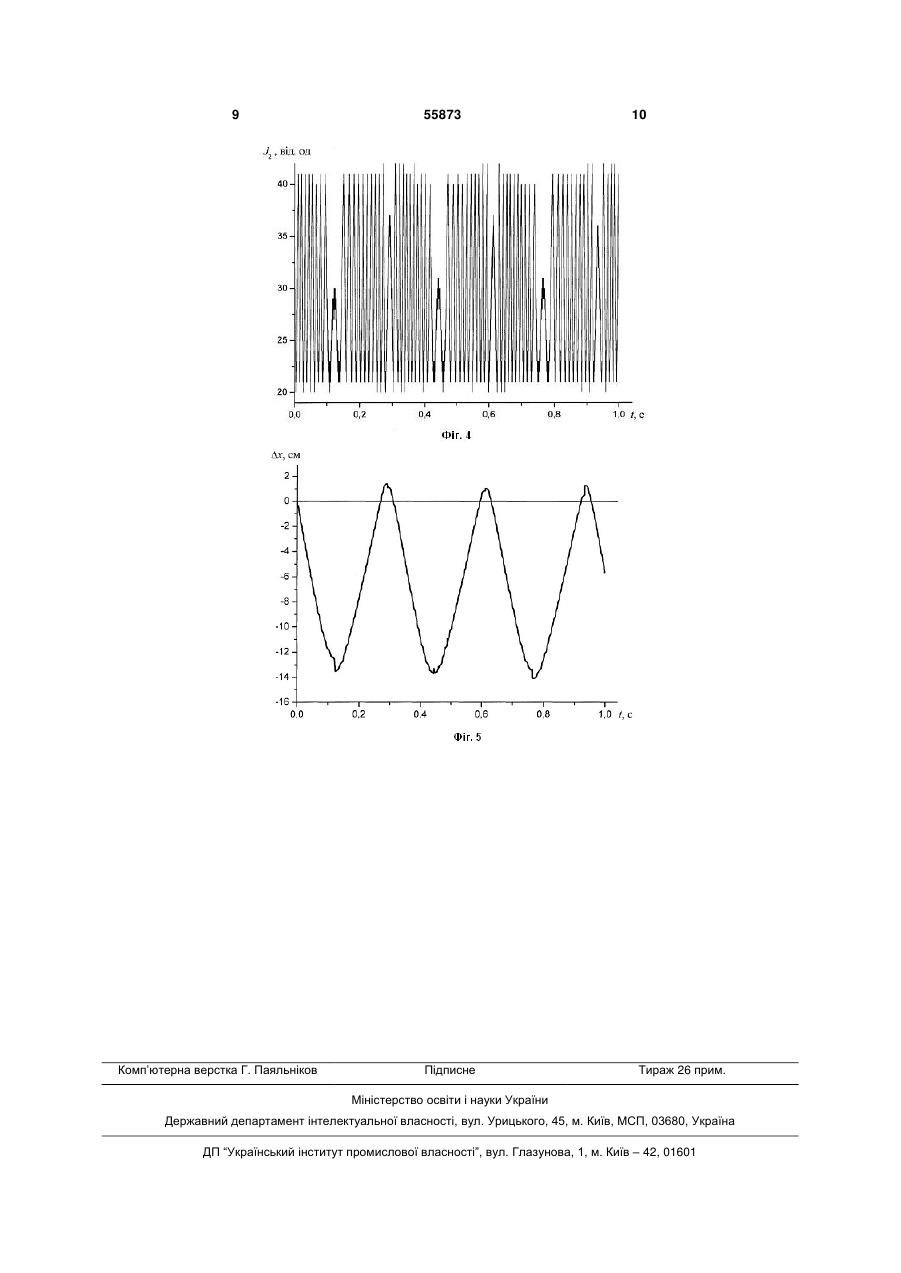
Спосіб вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти і утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом з їхньою наступною математичною обробкою, який відрізняється тим, що зазначену інтерференцію здійснюють у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі, квадратурні сигнали виділяють за допомогою диференціювання струмів напівпровідникових детекторів, з'єднаних з зазначеними зондами, швидкість об'єкта визначаюь за формулою 2 3 зованием двух зондов / О. В. Пилипенко, Н. Б. Горев, М. М Жечев, Л. Г. Запольский, П. И. Заболотный, И. Ф. Коджеспирова, Е. Н. Привалов // Техническая механика. -2009. - № 1. - С. 111-117]. Однак в цих способах треба знати коефіцієнт відбиття, що вимагає проведення калібрування при зміні об'єкта, стану його поверхні і/або відстані до нього. Найбільш близьким технічним рішенням, обраним за прототип, є радіохвильовий безконтактний спосіб вимірювання параметрів руху і вібрації [Волковец А. И. Радиоволновой бесконтактный метод измерения параметров движения и вибрации / А. И. Волковец, Д. Ф. Руденко, А. В. Гусинский, А. М. Кострикин // Доклады БГУИР. - 2007. № 4. - С. 58 – 64]. В цьому способі об'єкт, що вібрує, зондується електромагнітними хвилями діапазону надвисоких частот (НВЧ) і параметри руху об'єкта визначаються за фазою відбитого від нього сигналу. Оскільки безпосереднє однозначне визначення переміщення за фазою можливе тільки для переміщень, амплітуда яких не перевищує А/4, зондуючий НВЧ-сигнал модулюється сигналом проміжної частоти, довжина хвилі якого значно вище від довжини хвилі зондуючого сигналу. Відбитий від об'єкта модульований сигнал змішується з немодульованим опорним сигналом, і виділяються квадратурні сигнали проміжної частоти, що утворилися внаслідок цього змішування. За допомогою математичної обробки цих квадратурних сигналів знаходиться фаза відбитого сигналу, і з цієї фази визначаються параметри руху об'єкта. Спосіб не потребує калібрування при зміні досліджуваного об'єкта, стану його поверхні і/або відстані до нього. На фіг. 1 наведена структурна схема віброметра, що реалізує цей спосіб. Як видно з фіг. 1, внаслідок використання проміжної частоти апаратна реалізація цього способу є досить складною і потребує таких пристроїв, як фазовий маніпулятор, що забезпечує фазову модуляцію зондуючого сигналу сигналом проміжної частоти; цифро-аналоговий перетворювач, що формує модулюючий сигнал проміжної частоти; балансний змішувач, в якому здійснюється інтерференція модульованого відбитого сигналу з немодульованим опорним і на виході якого виділяються квадратурні сигнали проміжної частоти; два спрямовані відгалужувачі з узгодженими навантаженнями для спрямування сигналу НВЧ-генератора до фазового маніпулятора і відбитого сигналу до балансного змішувача. Технічною задачею, на вирішення якої направлена корисна модель, є створення способу, що дозволяє вимірювати параметри руху при довільному співвідношенні між амплітудою переміщення і довжиною хвилі зондуючого НВЧ-сигналу без необхідності проведення калібрування при зміні контрольованого об'єкта, стану його поверхні і/або відстані до нього. У відповідності зі сказаним вище, технічний результат, що досягається при здійсненні корисної моделі, полягає в спрощенні конструкції за рахунок відмови від використання проміжної частоти. В способі, що пропонується в цій корисній моделі, інтерференція відбитого та опорного сигналів відбувається в хвилевідній секції і квадратурні сиг 55873 4 нали містяться в струмах напівпровідникових детекторів, що з'єднані з двома зондами, розміщеними в цій секції на відстані однієї восьмої довжини хвилі електромагнітного випромінювання в хвилеводі один від одного. Ці сигнали виділяються за допомогою диференціювання сигналів напівпровідникових детекторів. Диференціювання дозволяє однозначно визначити швидкість об'єкта, інтегрування якої дає його переміщення. Крім того, воно також дозволяє виключити такі параметри, як коефіцієнт відбиття об'єкта і потужність генератора електромагнітного випромінювання, що робить непотрібним проведення калібрування при зміні об'єкта або відстані до нього і усуває похибку, пов'язану з нестабільністю потужності генератора. Структурна схема апаратної реалізації способу наведена на фіг. 2. Створена генератором електромагнітна хвиля проходить по хвилевідній секції, випромінюється рупорною антеною, досягає контрольованого об'єкта, відбивається від нього, приймається тією ж рупорною антеною і знов потрапляє до хвилевідної секції. Завдяки інтерференції відбитої хвилі з хвилею, що випромінюється генератором, в секції утворюється стояча хвиля. Амплітуда цієї хвилі реєструється за допомогою двох зондів і з'єднаних з ними напівпровідникових детекторів. Через те що зонди розташовані на відстані однієї восьмої довжини хвилі електромагнітного випромінювання один від одного, струми напівпровідникових детекторів містять два квадратурні сигнали. Сигнали напівпровідникових детекторів перетворюються у цифрову форму в аналого-цифровому перетворювачі та надходять до персонального комп'ютера, де проводиться їхнє числове диференціювання для виділення з них квадратурних сигналів з наступним визначенням швидкості й переміщення об'єкта. Швидкість об'єкта v визначається за формулою: в J2J1 J1J2 2 2 , J1 J2 0 2 4 kJ1 J2 / k 2 2 0, J1 J2 0, 2 де: - довжина хвилі електромагнітного випромінювання генератора у вільному просторі; J J11 - перша і друга похідна за часом від струму напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (далі - детектор 1); J J22 - перша і друга похідна за часом від струму напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (далі - детектор 2); k - відношення коефіцієнта пропорційності між квадратом модуля напруженості електричного поля і струмом детектора 2 до коефіцієнта пропорційності між квадратом модуля напруженості електричного поля і струмом детектора 1. Переміщення знаходиться інтегруванням швидкості. Коефіцієнт k залежить тільки від характеристик напівпровідникових детекторів і не залежить від коефіцієнта відбиття ані потужності генератора. Тому він може бути визначений, наприклад, як відношення струмів детектора 2 і детектора 1 в в 5 режимі біжучої хвилі, для чого досить провести тільки одне попереднє вимірювання. Зі сказаного вище випливає, що суттєві ознаки цієї корисної моделі полягають в тому, що інтерференція відбитого і опорного сигналів відбувається у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі, квадратурні сигнали визначаються за допомогою диференціювання струмів, з'єднаних з цими зондами напівпровідникових детекторів, за цими сигналами визначається швидкість об'єкта, і інтегруванням швидкості знаходиться його переміщення. Сукупність цих суттєвих ознак забезпечує досягнення зазначеного технічного результату, а саме спрощення конструкції. Це зумовлене тим, що до фази квадратурних сигналів, що містяться у струмах напівпровідникових детекторів, входить безпосередньо довжина хвилі зондучого сигналу, на той час як у прототипі використовуються квадратурні сигнали проміжної частоти. Отже, запропонований спосіб не потребує використання проміжної частоти, що дозволяє відмовитись від таких потрібних для утворення квадратурних сигналів цієї частоти пристроїв, як фазовий маніпулятор, цифро-аналоговий перетворювач, балансний змішувач та два спрямовані відгалужувачі з узгодженими навантаженнями. Замість цього використовується тільки хвилевідна секція з двома зондами і з'єднаними з ними напівпровідниковими детекторами. Це спрощення конструкції стає наочним при зіставленні фіг. 1 (прототип) і фіг. 2 (запропонований спосіб). Крім того, як випливає з вищесказаного, корисна модель дозволяє безпосередньо визначати швидкість, і тому ще одним результатом її застосування є розширення функціональних можливостей. Таким чином, зазначений технічний результат (спрощення конструкції та розширення функціональних можливостей) досягається тим, що в способі вимірювання параметрів руху і вібрації, що включає опромінення контрольованого об'єкта електромагнітним сигналом надвисокої частоти і утворення квадратурних сигналів внаслідок інтерференції відбитого від об'єкта сигналу з опорним сигналом з їхньою наступною математичною обробкою, згідно з корисною моделлю, зазначена інтерференція відбувається у хвилевідній секції з двома зондами, розташованими один від одного на відстані однієї восьмої довжини хвилі електромагнітного випромінювання у хвилеводі, квадратурні сигнали виділяються за допомогою диференціювання струмів напівпровідникових детекторів, з'єднаних з зазначеними зондами, швидкість об'єкта v визначається за формулою в J2J1 J1J2 2 2 , J1 J2 0 2 4 kJ1 J2 / k 2 2 0, J1 J2 0, 2 де: в - довжина хвилі електромагнітного випромінювання генератора у вільному просторі; 55873 6 J J11 - перша і друга похідна за часом від стру му напівпровідникового детектора, з'єднаного з дальшим від об'єкта зондом (далі - детектор 1); J J22 - перша і друга похідна за часом від струму напівпровідникового детектора, з'єднаного з ближчим до об'єкта зондом (далі - детектор 2); k - відношення коефіцієнта пропорційності між квадратом модуля напруженості електричного поля і струмом детектора 2 до коефіцієнта пропорційності між квадратом модуля напруженості електричного поля і струмом детектора 1; і переміщення об'єкта знаходиться інтегруванням швидкості. Для підтвердження можливості здійснення цієї корисної моделі було проведено експеримент з визначення відносного переміщення відбиваючої поверхні за виміряним струмом напівпровідникових детекторів. Вимірювання проводилися за допомогою лабораторного стенду, що складався з хвилевідної вимірювальної лінії з встановленими в ній двома зондами і з'єднаними із зондами напівпровідниковими детекторами; рупорної антени, розташованій на кінці хвилевідній лінії; НВЧгенератора; аналого-цифрового перетворювача і кривошипно-шатунного механізму, що приводив відбиваючу поверхню (металевий диск) у зворотно-поступальний рух співвісно з напрямком розповсюдження електромагнітної хвилі генератора по рупору. Амплітуда коливань диска становила 15,0 см. Довжина хвилі електромагнітного випромінювання, виміряна у хвилевідній лінії, дорівнювала 3,725 см. Це відповідало довжині хвилі у вільному просторі 2,90 см, тобто розмах коливань перевищував довжину хвилі електромагнітного випромінювання більш ніж у п'ять разів. Струми напівпровідникових детекторів реєструвалися за допомогою аналого-цифрового перетворювача LCard El4-140. Виміряні часові залежності струмів напівпровідникових детекторів 1 і 2 наведені відповідно на фіг. 3 і 4. Для обчислення похідних від струмів за часом, потрібних для розрахунку швидкості, виконувалася поліноміальна апроксимація цих залежностей. На фіг. 5 наведена часова залежність відносного переміщення диска, яка отримана числовим інтегруванням швидкості, визначеної за похідними від струмів напівпровідникових детекторів. Розмах коливань диска, визначений за цією залежністю, лежить в діапазоні 14,7 - 15,3 см, тобто похибка визначення розмаху коливань лежить в межах 2 %. Таким чином, розглянутий вище практичний приклад показує, що запропонований спосіб дозволяє визначати із задовільною точністю величину розмаху механічних коливань, що у декілька разів перевищує довжину хвилі електромагнітного випромінювання, без використання проміжної частоти і, отже, потрібних для цього пристроїв. Тим самим, цей приклад підтверджує технічний результат, що досягається використанням цієї корисної моделі - спрощення конструкції. На фіг. 1 наведено структурну схему апаратної реалізації прототипу. На фіг. 2 наведено структурну схему апаратної реалізації запропонованого способу. 7 На фіг. 3 наведено виміряну часову залежність струму напівпровідникового детектора, з'єднаного із зондом, дальшим від здійснюючого зворотнопоступальний рух об'єкта. На фіг. 4 наведено виміряну часову залежність струму напівпровідникового детектора, з'єднаного 55873 8 із зондом, ближчим до здійснюючого зворотнопоступальний рух об'єкта. На фіг. 5 наведено часову залежність відносного переміщення здійснюючого зворотнопоступальний рух об'єкта, визначену за виміряними струмами напівпровідникових детекторів. 9 Комп’ютерна верстка Г. Паяльніков 55873 Підписне 10 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of parameters of motion and vibration
Автори англійськоюPylypenko Oleh Viktorovych, Horiev Mykola Borysovych, Kodzhespirova Inna Fedorivna, Pryvalov Yevhen Mykolaiovych
Назва патенту російськоюСпособ измерения параметров движения и вибрации
Автори російськоюПилипенко Олег Викторович, Горев Николай Борисович, Коджеспирова Инна Федоровна, Привалов Евгений Николаевич
МПК / Мітки
МПК: G01H 9/00
Мітки: руху, спосіб, вібрації, параметрів, вимірювання
Код посилання
<a href="https://ua.patents.su/5-55873-sposib-vimiryuvannya-parametriv-rukhu-i-vibraci.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання параметрів руху і вібрації</a>
Спосіб вимірювання та контролю параметрів вібрації турбомашини
Номер патенту: 4721
Опубліковано: 15.02.2005
Автори: Жаріков Віталій Миколайович, Хвостов Костянтин Володимирович, Гарагуль Анатолій Андрійович, Бойко Михайло Васильович
МПК: G01H 11/00, G01M 7/02, G01M 7/00
Мітки: вібрації, турбомашині, параметрів, спосіб, контролю, вимірювання
Формула / Реферат:
Спосіб вимірювання та контролю параметрів вібрації турбомашин, за яким параметри вібрації вимірюють за допомогою датчиків віброприскорення, при цьому сигнали від датчиків віброприскорення перетворюють в цифрову форму, оброблюють за допомогою апаратно-програмного блоку, а результати відображаються в графічній формі на екрані дисплея апаратно-програмного блоку, який відрізняється тим, що вібраційні сигнали від датчиків віброприскорення або...
Спосіб ультразвукового вимірювання параметрів руху і пристрій для його реалізації
Номер патенту: 67829
Опубліковано: 15.07.2004
Автори: Гірник Сергій Арнольдович, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, Волохов Володимир Олексійович, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ
МПК: A61B 8/00
Мітки: спосіб, вимірювання, реалізації, пристрій, ультразвукового, руху, параметрів
Формула / Реферат:
1. Спосіб ультразвукового імпульсного вимірювання параметрів руху суцільних середовищ, який містить задання напрямку зондування досліджуваного середовища, періодичне випромінювання вздовж заданого напрямку зондування послідовності зондуючих ультразвукових хвильових імпульсів, прийом ультразвукових хвиль, відбитих від досліджуваного середовища, перетворення відбитих ультразвукових хвиль в електричний сигнал відгуку, його підсилення,...
Пристрій для вимірювання і контролю параметрів вібрації машин
Номер патенту: 32472
Опубліковано: 15.12.2000
Автори: Немчин Олександр Федорович, Клявлін Валерій Володимирович
МПК: G01M 7/02
Мітки: вібрації, контролю, пристрій, вимірювання, машин, параметрів
Текст:
...(частоті обертання вала й ін.). З вихо ду фільтрів 3 сигнал надхо дить на входи інтегратора 4, який перетворює сигнал вібродатчика 1, що пропорційний віброприскоренню, у сигнал, що пропорційний віброшвидкості, який далі надходить на вхід блока усереднення 5. Блок усереднення 5 забезпечує одержання постійної напруги, пропорційної віброшвидкості. Час усереднення обирається на підста ві аналізу імпульсного ха рактеру вібропроцесів для...
Пристрій для вимірювання параметрів вібрації машин
Номер патенту: 19897
Опубліковано: 25.12.1997
Автори: Бойко Михайло Васильович, Поліщук Олег Федорович, Саприкін Сергій Олексійович, Божко Олександр Євгенович
МПК: G01M 7/02
Мітки: вібрації, машин, вимірювання, параметрів, пристрій
Текст:
...между осями вибропреобразователей 1. Параметр А характеризует амплитуду малых угловых колебаний и измеряется устройством с помощью измерителя 4. Поступательные колебания S(t) с частотой f (в направлении осей вибропреобразователей 1) точки С (не показана) , расположенной между вибропреобразователями 1 на расстоянии 1/2 от каждого из них, приближенно определяются формулой S(t) = | [ s t ( t ) + S 2 (t)] = - Bcos(Ut где 1 В = ^ ^ + A^cosq»,)...
Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів руху літального апарата
Номер патенту: 55645
Опубліковано: 27.12.2010
Автор: Коломійцев Олексій Володимирович
МПК: G01S 17/66, G01S 17/42
Мітки: руху, метод, параметрів, літального, частотно-часовий, апарата, розпізнавання, пошуку, вимірювання
Формула / Реферат:
Частотно-часовий метод пошуку, розпізнавання та вимірювання параметрів літального апарата (ЛА), який полягає у тому, що на передавальному боці лазерної інформаційно-вимірювальної системи (ЛІВС) із синхронізованого спектра випромінювання одномодового багаточастотного лазера виділяють необхідні пари частот для створення рівносигнального напрямку у вигляді чотирьох, які частково перетинаються, парціальних діаграм спрямованості (ДС),...
Попередній патент: Пристрій для зчитування двійкової інформації
Наступний патент: Спосіб автоматизованого розрахунку електричних кіл методом миттєвої потужності
Випадковий патент: Спосіб приготування зразків сухих крапель крові для проведення молекулярно-генетичних досліджень