Тренажер гідротранспортної установки
Номер патенту: 58707
Опубліковано: 26.04.2011
Автори: Коренькова Тетяна Валеріївна, Шоколов Володимир Миколайович, Родькін Дмитро Йосипович, Сердюк Олександр Олександрович


Формула / Реферат
Тренажер гідротранспортної установки, що включає перший та другий насоси, з'єднані паралельно, перший і другий приводні двигуни однойменних насосів, перший та другий датчики швидкості, встановлені на одному валу з першим та другим приводними двигунами відповідно, першу засувку на всмоктуванні та другу засувку на подачі першого насосного агрегату, другу засувку на подачі другого насосного агрегату, зворотний клапан, встановлений після другої засувки у напірному патрубку другого насосного агрегату, напірний трубопровід, перший, другий та третій датчики тиску, перший і другий датчики продуктивності, першу та другу засувки в напірному трубопроводі, гідротурбінний агрегат у першому обвідному трубопроводі, що включає гідротурбіну, встановлену на одному валу з асинхронним генератором і датчиком швидкості, першу засувку на вході та другу засувку на виході гідротурбіни, перший приймальний резервуар, перший і другий перетворювачі частоти, підключені до статорних обмоток першого та другого приводних електродвигунів відповідно, третій перетворювач частоти, підключений до статорних обмоток асинхронного генератора, перші та другі датчики струму, напруги і швидкості першого та другого приводних електродвигунів відповідно, треті датчики струму, напруги та швидкості асинхронного генератора відповідно, блок зв'язків виходів датчиків з обчислювальним блоком, обчислювальний блок, блок відображення інформації, причому перший датчик тиску розташований у напірному трубопроводі після другої засувки на подачі першого насосного агрегату, другий датчик тиску встановлений після зворотного клапана в напірному трубопроводі, перший датчик продуктивності розташований у напірному трубопроводі після другого датчика тиску, перша засувка встановлена у напірному трубопроводі перед третім датчиком тиску, друга засувка встановлена у напірному трубопроводі після третього датчика тиску, другий датчик продуктивності встановлений після другої засувки у напірному трубопроводі, який відрізняється тим, що додатково обладнаний регулювальною засувкою, встановленою на одному валу з редуктором та четвертим асинхронним двигуном, четвертим перетворювачем частоти, підключеним до статорних обмоток четвертого асинхронного двигуна, силовим перемикачем, джерелом безперебійного живлення четвертого асинхронного двигуна, датчиком положення регулювальної засувки, першим місцевим звуженням, розташованим у другому обвідному трубопроводі, першою засувкою на вході та другою засувкою на виході першого місцевого звуження, ежектором повітря, третьою засувкою на виході ежектора, другим місцевим звуженням, розташованим у третьому обвідному трубопроводі, першою засувкою на вході та другою засувкою на виході другого місцевого звуження; пристроєм підігріву води, встановленим у першому приймальному резервуарі, другим приймальним резервуаром, першою вертикальною ділянкою трубопроводу для напірної подачі води у другий приймальний резервуар, першою засувкою на вході першої вертикальної ділянки, другою вертикальною ділянкою трубопроводу для зливу води, другою засувкою, встановленою у другій вертикальній ділянці, першим допоміжним трубопроводом для аварійної відкачки рідини, першим триходовим вентилем, другим допоміжним трубопроводом для заливу та зливу води у трубопровідну систему гідротранспортної установки, другим триходовим вентилем, третьою засувкою у другому допоміжному трубопроводі, першим, другим та третім вентилями для стравлювання повітря, встановленими у напірному трубопроводі, причому регулювальна засувка розташована в напірному трубопроводі після першого датчика продуктивності, перший триходовий вентиль встановлений в усмоктувальному патрубку другого насоса, другий триходовий вентиль розташований на вході другого допоміжного трубопроводу, третя засувка встановлена після другого триходового вентиля на виході другого допоміжного трубопроводу, перший вентиль для стравлювання повітря встановлений у напірному трубопроводі після першої засувки на виході першого насоса, другий вентиль для стравлювання повітря розташований у напірному трубопроводі після третього датчика тиску, третій вентиль для стравлювання повітря встановлений у напірному трубопроводі після другого вентиля для стравлювання повітря, виходи першого, другого та третього датчиків швидкості з'єднані з першим, п'ятим і десятим входами блока зв'язків відповідно, виходи першого, другого і третього датчиків напруги з'єднані з четвертим, сьомим та одинадцятим входами згаданого блока відповідно, виходи першого, другого і третього датчиків струму з'єднані з другим, шостим та дев'ятим входами блока зв'язків відповідно, виходи першого, другого та третього датчиків тиску з'єднані з третім, восьмим і п'ятнадцятим входами блока зв'язків відповідно, виходи першого та другого датчиків продуктивності з'єднані з дванадцятим і чотирнадцятим входами блока зв'язків відповідно, вихід датчика положення регулювальної засувки з'єднаний із тринадцятим входом керуючого блока відповідно, перший, другий, третій та четвертий керуючі виходи блока зв'язків з'єднані з відповідними керуючими входами першого, другого, третього та четвертого перетворювачів частоти, обчислювальний блок з'єднаний із блоком відображення інформації.
Текст
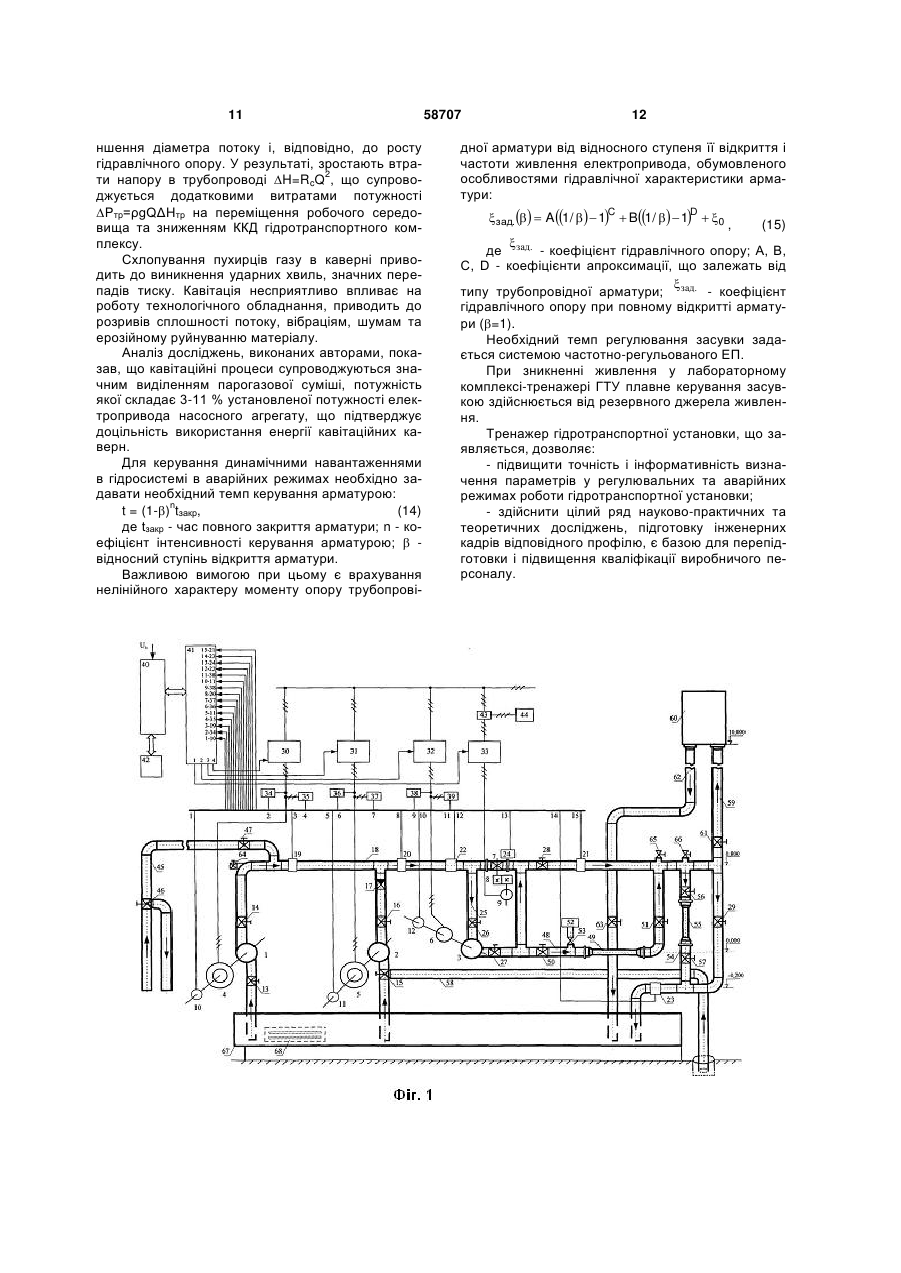
Тренажер гідротранспортної установки, що включає перший та другий насоси, з'єднані паралельно, перший і другий приводні двигуни однойменних насосів, перший та другий датчики швидкості, встановлені на одному валу з першим та другим приводними двигунами відповідно, першу засувку на всмоктуванні та другу засувку на подачі першого насосного агрегату, другу засувку на подачі другого насосного агрегату, зворотний клапан, встановлений після другої засувки у напірному патрубку другого насосного агрегату, напірний трубопровід, перший, другий та третій датчики тиску, перший і другий датчики продуктивності, першу та другу засувки в напірному трубопроводі, гідротурбінний агрегат у першому обвідному трубопроводі, що включає гідротурбіну, встановлену на одному валу з асинхронним генератором і датчиком швидкості, першу засувку на вході та другу засувку на виході гідротурбіни, перший приймальний резервуар, перший і другий перетворювачі частоти, підключені до статорних обмоток першого та другого приводних електродвигунів відповідно, третій перетворювач частоти, підключений до статорних обмоток асинхронного генератора, перші та другі датчики струму, напруги і швидкості першого та другого приводних електродвигунів відповідно, треті датчики струму, напруги та швидкості асинхронного генератора відповідно, блок зв'язків виходів датчиків з обчислювальним блоком, обчислювальний блок, блок відображення інформації, причому перший датчик тиску розташований у напірному трубопроводі після другої засувки на подачі першого насосного агрегату, другий датчик тиску встановлений після зворотного клапана в напірному трубопроводі, перший датчик продуктивності розташований у напірному трубопроводі після другого датчика тиску, перша засувка встановлена у напірному трубопроводі перед третім 2 (19) 1 3 58707 4 насоса, другий вентиль для стравлювання повітря розташований у напірному трубопроводі після третього датчика тиску, третій вентиль для стравлювання повітря встановлений у напірному трубопроводі після другого вентиля для стравлювання повітря, виходи першого, другого та третього датчиків швидкості з'єднані з першим, п'ятим і десятим входами блока зв'язків відповідно, виходи першого, другого і третього датчиків напруги з'єднані з четвертим, сьомим та одинадцятим входами згаданого блока відповідно, виходи першого, другого і третього датчиків струму з'єднані з другим, шостим та дев'ятим входами блока зв'язків відпо відно, виходи першого, другого та третього датчиків тиску з'єднані з третім, восьмим і п'ятнадцятим входами блока зв'язків відповідно, виходи першого та другого датчиків продуктивності з'єднані з дванадцятим і чотирнадцятим входами блока зв'язків відповідно, вихід датчика положення регулювальної засувки з'єднаний із тринадцятим входом керуючого блока відповідно, перший, другий, третій та четвертий керуючі виходи блока зв'язків з'єднані з відповідними керуючими входами першого, другого, третього та четвертого перетворювачів частоти, обчислювальний блок з'єднаний із блоком відображення інформації. Корисна модель належить до електротехніки та може бути використана в якості дрібномасштабної фізичної моделі гідротранспортної установки (ГТУ) при підготовці фахівців електромеханічного профілю, виконанні науково-дослідних робіт з вивчення режимів електрогідравлічного обладнання. При експлуатації ГТУ виникають різного роду аварійні режими: підвищені пульсації напору в трубопроводі, гідравлічний удар, кавітаційні процеси, що знижують енергетичну ефективність та надійність роботи технологічного обладнання. У реальних умовах роботи насосних комплексів не завжди є можливість для експериментальної перевірки ефективності того чи іншого методу, аналізу впливу гідродинамічних процесів на характеристики насосного обладнання. Тому заслуговує на увагу питання розробки дрібномасштабної фізичної моделі гідротранспортної установки з можливістю реалізації різних методів регулювання технологічних параметрів, формування експлуатаційних та аварійних режимів роботи насосного обладнання. Результати досліджень, отримані на лабораторній установці, на базі законів подібності можуть бути узагальнені та перенесені на реальний об'єкт. Відомий навчальний стенд для визначення напірно-витратних і навантажувальних характеристик насоса [Пат. 2007628 Российская Федерация, МКИ F15В19/00. Учебный стенд для снятия статических характеристик регулируемых насосов /Супрабхат Рой, Мышлевский Л.М. - № 5033131/29; Заявл. 24.03.1992; Опубл. 15.02.1994], що включає насос, гідробак, трубопровід, запобіжний клапан і навантажувальний дросель, датчики контролю технологічних параметрів та реєструючу апаратуру. Стенд дозволяє одержати характеристики насоса у координатах «продуктивність - тиск» і «обертальний момент - тиск», здійснювати навчання студентів при вивченні усіх видів насосних агрегатів (НА). Недоліками наведеного лабораторного стенда є відсутність можливості одержання енергетичних характеристик насосного обладнання при різних методах регулювання та дослідження динамічних режимів роботи насосної установки (НУ). Найбільш близьким технічним рішенням до корисної моделі, що заявляється, є демонстраційна модель насосної установки [Пат. 62489А Украї на, МКИ F04D27/00. Демонстраційна модель насосної установки /Коренькова Т.В., Родькін Д.Й., Михайличенко Д.А., Перекрест А.Л., Костюк Ю.С. - № 62489 А; Заявл. 02.04.2003; Опубл. 15.12.2003, бюл. № 12], що включає перший і другий насосні агрегати, з'єднані паралельно, перший і другий приводні двигуни однойменних НА, засувки на всмоктуванні і подачі першого та другого насоса, датчики тиску і продуктивності НА. З метою підвищення достовірності результатів при аналізі енергетичних режимів роботи НУ вона додатково обладнана третім приводним двигуном, засувками на всмоктуванні та подачі третього НА, датчиками тиску і продуктивності третього насоса; датчиками швидкості однойменних двигунів НА; датчиками потужності двигунів насосів; регуляторами швидкості двигунів однойменних агрегатів; блоком зв'язку виходів датчиків з обчислювальним блоком, обчислювальним блоком, блоком відображення інформації. Причому датчики тиску та продуктивності турбомеханізмів встановлені на вихідних патрубках однойменних НА. Датчики потужності першого, другого і третього двигунів насосів встановлені на виході першого, другого та третього регуляторів швидкості. Виходи першого, другого і третього датчиків тиску з'єднані з третім, десятим та сьомим входами блоку зв'язків з обчислювальним блоком; виходи першого, другого і третього датчиків продуктивності зв'язані з четвертим, дев'ятим та восьмим входами блоку зв'язків; виходи першого, другого і третього датчиків потужності з'єднані з другим, одинадцятим та шостим входами згаданого блоку; виходи першого, другого і третього датчиків швидкості обертання двигунів з'єднані з першим, дванадцятим та п'ятим входами блоку зв'язку с обчислювальним блоком; перший, другий і третій керуючі виходи блоку зв'язків з'єднані з керуючими входами першого, другого і третього регуляторів швидкості обертання двигунів; причому другий і третій насосні агрегати виконані у виді оборотних гідромашин - насосів-турбін. Стенд дозволяє досліджувати енергетичну ефективність роботи насосної установки при використанні трьох методів регулювання продуктивності: при регулюванні засувкою, встановленої на виході першого насоса; регулюванні зміною частоти обертання робочого колеса першого турбомеханізма та регулюванні подачі шляхом корекції 5 режимів гідравлічної мережі за допомогою активного регулювального пристрою (оборотної гідромашини). Можливості стенда передбачають дослідження статичних та динамічних характеристик насосного обладнання. До недоліків стенда відноситься відсутність можливості одержання достатньої інформації про роботу електрогідравлічного обладнання в аварійних режимах (гідроудар, кавітаційні процеси). Метою корисної моделі є підвищення точності та достовірності інформації про статичні і динамічні характеристики гідротранспортної установки в регулювальних та аварійних режимах роботи. Зазначена мета досягається тим, що тренажер гідротранспортної установки додатково обладнаний: - джерелом безперебійного живлення, регулювальною засувкою з частотно-керованим електроприводом для зниження пульсацій тиску в напірному трубопроводі; - двома кавітаційними каналами, ежектором повітря та пристроєм підігріву води для дослідження процесів газоутворення у потоці рідини; - вертикальними ділянками трубопроводу, що забезпечують протитиск та дозволяють створювати умови для виникнення гідравлічних ударів у гідротранспортній мережі при аварійній зупинці насосного агрегату; - двома допоміжними ділянками трубопроводу: перший - для аварійної відкачки рідини, другий для заливу та зливу води у трубопровідну систему гідротранспортної установки. Корисна модель пояснюється кресленням, де на фіг. 1 приведена функціональна схема тренажера гідротранспортної установки. На фіг. 1 прийняті наступні позначення: 1, 2 - перший та другий насоси; 4, 5, 9 - перший, другий та четвертий приводні електродвигуни; 3 - гідротурбіна; 6 - асинхронний генератор; 7 - регулювальна засувка; 8 редуктор; 10, 11, 12 - перший, другий та третій датчики швидкості; 13, 14, 16, 26, 27, 28, 29,47, 50, 51, 56, 57, 61, 63 - засувки; 15, 46 - перший та другий триходові вентилі; 17 - зворотний клапан; 18 напірний трубопровід; 19, 20, 21 - перший, другий та третій датчики тиску; 22, 23 - перший та другий датчики продуктивності; 24 - датчик кута повороту робочого органа регулювальної засувки; 25, 48, 54 - перший, другий та третій обвідні трубопроводи; 30, 31, 32, 33 - перший, другий, третій та четвертий перетворювачі частоти; 34, 36, 38 - перший, другий та третій датчики струму; 35, 37, 39 - перший, другий та третій датчики напруги; 40 - обчислювальний блок (ЕОМ), 41 - блок зв'язків входів датчиків, 42 - блок відображення інформації; 43 силовий перемикач; 44 - безперебійне джерело живлення; 45, 58 - перший та другий додаткові трубопроводи; 49, 55 - перше та друге місцеві звуження; 52 - ежектор повітря; 53, 64, 65, 66 - вентилі; 59, 62 - вертикальні трубопроводи; 60 - другий приймальний резервуар; 67 - перший приймальний резервуар; 68 - пристрій підігріву води. Тренажер гідротранспортної установки включає перший та другий насоси, з'єднані паралельно, приводні двигуни однойменних насосів. Датчики швидкості встановлені на одному валу з привод 58707 6 ними двигунами відповідно. Засувки на всосі і подачі першого та другого НА, зворотний клапан, встановлений після другої засувки в напірному патрубку другого НА, напірний трубопровід. Перший, другий та третій датчики тиску, перший та другий датчики продуктивності, першу та другу засувки в напірному трубопроводі. Гідротурбінний агрегат у першому обвідному трубопроводі, що включає гідротурбіну, встановлену на одному валу з асинхронним генератором (АГ) і датчиком швидкості, засувки на вході та виході гідротурбіни. Перший приймальний резервуар. Перший і другий перетворювачі частоти (ПЧ), підключені до статорних обмоток першого та другого приводних електродвигунів відповідно. Третій ПЧ, підключений до статорних обмоток асинхронного генератора. Датчики струму, напруги і швидкості першого, другого приводних електродвигунів та асинхронного генератора відповідно. Блок зв'язку виходів датчиків, обчислювальний блок, блок відображення інформації. Причому перший датчик тиску розташований у напірному трубопроводі після другої засувки на подачі першого НА, другий датчик тиску встановлений після зворотного клапана в напірному трубопроводі, перший датчик продуктивності розташований у напірному трубопроводі після другого датчика тиску, перша засувка встановлена в напірному трубопроводі перед третім датчиком тиску, друга засувка встановлена в напірному трубопроводі після третього датчика тиску, другий датчик продуктивності встановлений після другої засувки в напірному трубопроводі. Експериментальний тренажер ГТУ додатково обладнаний регулювальною засувкою, встановленою на одному валу із редуктором і четвертим асинхронним двигуном (АД), четвертим ПЧ, підключеним до статорних обмоток четвертого АД, силовим перемикачем, джерелом безперебійного живлення четвертого АД, датчиком положення регулювальної засувки. Першим місцевим звуженням, розташованим у другому обвідному трубопроводі, засувками на вході та виході першого місцевого звуження, ежектором повітря, засувкою на виході ежектора. Другим місцевим звуженням, розташованим у третьому обвідному трубопроводі, засувками на вході та виході другого місцевого звуження. Пристроєм підігріву води, встановленим у першому приймальному резервуарі. Другим приймальним резервуаром. Першою вертикальною ділянкою трубопроводу для напірної подачі води у другий прийомний резервуар, засувкою на вході першої вертикальної ділянки. Другою вертикальною ділянкою трубопроводу для зливу води, засувкою, встановленою в другій вертикальній ділянці. Першим допоміжним трубопроводом для аварійної відкачки рідини, першим триходовим вентилем. Другим допоміжним трубопроводом для заливу та зливу води у трубопровідну систему ГТУ, другим триходовим вентилем, третьою засувкою в другому допоміжному трубопроводі. Вентилями для стравлення повітря, встановленими в напірному трубопроводі. Причому регулювальна засувка розташована у напірному трубопроводі після першого датчика продуктивності, перший триходовий вентиль встановлений в усмоктувальному патрубку другого насоса, дру 7 гий триходовий вентиль розташований на вході другого допоміжного трубопроводу, третя засувка встановлена після другого триходового вентиля на виході другого допоміжного трубопроводу, перший вентиль для стравлення повітря встановлений у напірному трубопроводі після першої засувки на виході першого насоса, другий вентиль для стравлення повітря розташований у напірному трубопроводі після третього датчика тиску, третій вентиль для стравлення повітря встановлений у напірному трубопроводі після другого вентиля для стравлення повітря. Виходи першого, другого і третього датчиків швидкості з'єднані з першим, п'ятим та десятим входами блоку зв'язків відповідно. Виходи першого, другого і третього датчиків напруги з'єднані з четвертим, сьомим та одинадцятим входами згаданого блоку відповідно. Виходи першого, другого і третього датчиків струму з'єднані з другим, шостим та дев'ятим входами блоку зв'язків відповідно. Виходи першого, другого і третього датчиків тиску з'єднані з третім, восьмим та п'ятнадцятим входами блоку зв'язків відповідно. Вихід першого і другого датчиків продуктивності з'єднані з дванадцятим та чотирнадцятим входами блоку зв'язків відповідно. Вихід датчика положення регулювальної засувки з'єднаний із тринадцятим входом керуючого блоку відповідно. Перший, другий, третій і четвертий керуючі виходи блоку зв'язків з'єднані з відповідними керуючими входами першого, другого, третього та четвертого перетворювачів частоти, обчислювальний блок з'єднаний із блоком відображення інформації. Розглянемо послідовність включення елементів експериментального комплекса-тренажера ГТУ в регулювальних і аварійних режимах. У вихідному стані (до моменту включення мережі живлення) трубопровідна арматура знаходиться у положенні "закрито". Для запуску першого насоса 1 відкриваємо засувку 13 в усмоктувальному патрубку та засувки 7, 28, 29 у напірному трубопроводі 18. Задаючи необхідну частоту мережі живлення на вході ПЧ 30, здійснюємо запуск АД 4 насоса 1. Технологічні параметри ГТУ опитуємо за допомогою датчиків тиску 19, 20, 21 та продуктивності 22, 23; електричні - за допомогою датчиків швидкості 10, напруги 35 і струму 34. У разі запуску першого насоса 1 на вертикальну ділянку 59 відкриваємо засувки 13, 7, 28 у напірному трубопроводі 18 та засувки 61, 63, встановлені на вертикальних ділянках трубопроводу 59, 62. Засувку 29 закриваємо. При регулюванні продуктивності дроселюванням на виході НА 1 виконуємо прикриття засувки 14 на необхідну величину продуктивності, що фіксується датчиком продуктивності 22. При регулюванні продуктивності на виході НА 1 зміною частоти обертання приводного двигуна виконуємо зниження частоти мережі живлення, що задається за допомогою ПЧ 30. При цьому засувка 14 знаходиться в положенні "відкрито". При використанні активного регулювального пристрою в ГТУ засувку 7 закриваємо, засувки 26, 27 у першому обвідному трубопроводі 25 відкриваємо. Під впливом потоку рідини гідротурбінний 58707 8 агрегат 3 починає обертатися. При досягненні максимальних параметрів напору та продуктивності на виході гідротурбіни 3 відбувається синхронізація АГ 6 із мережею живлення. При необхідності зниження продуктивності ГТУ прикриваємо засувку 26 чи задаємо необхідний режим роботи АГ 6 гідротурбіни 3 за допомогою ПЧ 32. Технологічні параметри ГТУ опитуємо за допомогою датчиків тиску 19, 20, 21 та продуктивності 22, 23; електричні за допомогою датчиків швидкості 12, напруги 39 і струму 38. При необхідності запуску другого насоса 2 відкриваємо другий триходовий вентиль 15 в усмоктувальному патрубку. Задаючи необхідну частоту мережі живлення за допомогою ПЧ 31, здійснюємо запуск АД 5 насоса 2. При регулюванні продуктивності на виході НА 2 дроселюванням виконуємо прикриття засувки 16 на необхідну величину, що фіксується датчиком продуктивності 23. При регулюванні продуктивності на виході НА 2 зміною частоти обертання приводного двигуна виконуємо зниження частоти мережі живлення, що задається ПЧ 31. При цьому засувка 16 знаходиться в положенні "відкрито". При дослідженні аварійних режимів роботи ГТУ при раптовому провалі в енергопостачанні, відключаємо живлення, що подається до ПЧ 30 першого НА 1, переводимо живлення АД 9 регулювальної засувки 7 на джерело безперебійного живлення 44 шляхом перемикання силового перемикача 43. Для запобігання гідравлічного удару в трубопроводі здійснюємо плавне прикриття засувки 7. Для дослідження кавітаційних режимів у ГТУ відкриваємо засувки 50, 51 у другому обвідному трубопроводі 48 першого місцевого звуження 49 та засувки 56, 57 у третьому обвідному трубопроводі 54 другого місцевого звуження 55. Робимо впуск повітря ежектором повітря 52 і відкриттям вентиля 53. Стравлення повітря із системи трубопроводу ГТУ робимо вентилями 64, 65, 66. Залив та злив води в трубопровідну систему ГТУ здійснюється другою допоміжною ділянкою трубопроводу 45 при відкритих засувках 46, 47. У разі потреби аварійної відкачки рідини (трубопровідна арматура ГТУ повинна знаходиться в положенні "закрито") відкриваємо триходовий вентиль 15 на першій допоміжній ділянці трубопроводу 58, запускаємо другий НА 2, відкриваємо засувку 16 на виході другого насоса 2, засувку 47 у другій допоміжній ділянці трубопроводу 45 та триходовий вентиль 46. Для аналізу регулювальних режимів роботи насосної установки на базі пропонованого тренажера ГТУ розглянемо математичний опис напірновитратних та енергетичних характеристик насоса, що працює на трубопровідну мережу з протитиском. Напірно-витратну характеристику насоса з достатнім ступенем точності можна представити залежністю: Hнас = A2v2 + B2vQ + C2Q2. (1) Гідравлічна мережа з протитиском описується рівнянням виду: 9 58707 Hc=Hст + RcQ2 (2) Потужність, що підводиться до вала відцентрової машини, дорівнює: P = A3v2Q + B3vQ2+D3v3 (3) Корисна потужність насоса має вид: g Pn A 2v 2Q B2vQ 2 C2Q3 1000 . (4) Коефіцієнт корисної дії турбомеханізма: Pn g A 2v 2Q B2vQ 2 C2Q3 P 1000 A 3v 2Q B3vQ 2 D3v 3 . (5) де у виразах (1-5) Q - продуктивність насоса, м3/с; Ннас - напір насоса, м; v = /н - відносна швидкість обертання робочого колеса насоса; н номінальна швидкість обертання насоса, с-1; А2, B2, C2, А3, B3, D3 - коефіцієнти апроксимації, що залежать від конструктивних особливостей турбомеханізма та визначаються за паспортними характеристиками насосів; Нст - статичний напір мережі, м; Rc - гідродинамічний опір мережі, с2/м5; щільність рідини, кг/м3; g = 9.81 м/с2 - прискорення вільного падіння. При використанні дроселювання зменшується споживана потужність на валу насоса та підвищується частка енергії, що витрачається на робочому органі засувки: g HzQ1 Pz 1000 1 , (6) тм де Hz - витрати напору на засувці при продуктивності, що дорівнює Q1; η1 - ККД насоса при продуктивності Q1. Чим більш глибоко здійснюється процес регулювання дроселюванням, тим вище непродуктивні витрати потужності. Тому, даний метод є енергетично недоцільним. Робота насоса на гідравлічну мережу з протитиском при зміні швидкості обертання описується системою рівнянь виду: Hнас v A 2 v 2 B 2 vQ C 2Q 2 ; Hc Hcт R 2Q 2 ; ; (7) Рішення системи (7) дозволило одержати залежність продуктивності насоса від зміни швидкості його обертання: Qv B2v B2v 2 4(C2 Rc )( A 2v 2 Hc ) 2 2C2 Rc , (8) Потужність, споживана насосом: Pv A 3 v 2 ( B2v B2v 2 4(C2 Rc )( A 2v 2 Hc ) ) 2 2C2 Rc B3 v( B2v B2v 2 4(C2 Rc )( A 2v 2 Hc ) )2 2 4C2 Rc 2 D3 v 3 . (9) Залежність ККД турбомеханізма від зміни швидкості обертання з урахуванням гідродинамічних параметрів мережі має вигляд: B 2 v C2 2 9.8 A 2v 2 2C2 2Rc 2C2 2Rc 2 ( v ) A v 2 B3 v 2 2C2 2Rc 3 D3 v 3 2C2 2Rc 2C 2R 2 2 c , (10) 10 де B2v B2v 2 4C2 A 2v 2 4C2Hc 4Rc A 2v 2 4RcHc 2 . При регулюванні продуктивності частотою обертання НА відбувається зниження споживаної потужності на 20-30 % нижче номінального значення, ККД насоса змінюється незначною мірою. Тому, даний метод є енергетично ефективним. Регулювання продуктивності насосної установки шляхом корекції режимів гідравлічної мережі з використанням активного регулювального пристрою, у якості якого виступає гідротурбінний НА, є альтернативним варіантом регулювання продуктивності. Величина гідравлічної потужності турбіни, регулюється кількістю рідини, що проходить через неї електричним шляхом. При цьому як система електричного приводу може бути використаний, наприклад, частотно-регульований електропривод. Напірно-витратна характеристика гідротурбіни має вид: 2 Hгт v H0 v гт Rвт Q2 (11) де H0 - напір гідротурбіни при продуктивності, що дорівнює нулю; Rвm - внутрішній опір гідротурбіни; vгт - відносна швидкість обертання робочого колеса гідротурбіни. Потужність, споживана гідротурбіною: Pгт(v) = ρgQгт(v)Hгт(v)ηгт(v), (12) Де Qгт(v) - продуктивність; Hгт(v) - напір; ηгт(v) ККД гідротурбінного агрегату при зміні частоти обертання v. Регулюючи швидкість обертання приводного двигуна турбіни vm=var, домагаються зміни напору, створюваного турбіною, зміни кількості води, що проходить через турбіну, і, отже, зміни потужності на валу електричного генератора. Втрати енергії при цьому можуть бути мінімальними. Метод регулювання продуктивності активним впливом на комунікації є енергетично та економічно ефективним засобом, оскільки відсутні непродуктивні втрати енергії на дроселюючому органі, а також відбувається рекуперація енергії в мережу. При цьому вартість такої системи нижче вартості частотнорегульованого електропривода, де потужність перетворюючого пристрою повинна дорівнювати потужності двигуна турбомеханізма. Для аналізу аварійних режимів ГТУ розглянемо особливості виникнення нестаціонарних процесів у гідросистемі. У тих випадках, коли тиск у будь яких точках потоку рідини знижується настільки, що стає менше тиску насичених парів, у гідротранспортній системі виникають кавітаційні процеси, що супроводжуються утворенням у рідині порожнин, заповнених паром чи газом, об'ємом: iN Wкав t Qi, j j1 , (13) де t – інтервал часу наявності кавітації; iN Qi, j - різниця витрат на і-ом і j-ом ділянках тру j1 бопроводу. Збільшення об'єму каверни приводить до зме 11 ншення діаметра потоку і, відповідно, до росту гідравлічного опору. У результаті, зростають втрати напору в трубопроводі H=RcQ2, що супроводжується додатковими витратами потужності Pтр=ρgQΔHтр на переміщення робочого середовища та зниженням ККД гідротранспортного комплексу. Схлопування пухирців газу в каверні приводить до виникнення ударних хвиль, значних перепадів тиску. Кавітація несприятливо впливає на роботу технологічного обладнання, приводить до розривів сплошності потоку, вібраціям, шумам та ерозійному руйнуванню матеріалу. Аналіз досліджень, виконаних авторами, показав, що кавітаційні процеси супроводжуються значним виділенням парогазової суміші, потужність якої складає 3-11 % установленої потужності електропривода насосного агрегату, що підтверджує доцільність використання енергії кавітаційних каверн. Для керування динамічними навантаженнями в гідросистемі в аварійних режимах необхідно задавати необхідний темп керування арматурою: t = (1-)ntзакр, (14) де tзакр - час повного закриття арматури; n - коефіцієнт інтенсивності керування арматурою; відносний ступінь відкриття арматури. Важливою вимогою при цьому є врахування нелінійного характеру моменту опору трубопрові 58707 12 дної арматури від відносного ступеня її відкриття і частоти живлення електропривода, обумовленого особливостями гідравлічної характеристики арматури: зад. A1/ 1C B1/ 1D 0 зад. , (15) де - коефіцієнт гідравлічного опору; А, В, С, D - коефіцієнти апроксимації, що залежать від типу трубопровідної арматури; зад. - коефіцієнт гідравлічного опору при повному відкритті арматури (=1). Необхідний темп регулювання засувки задається системою частотно-регульованого ЕП. При зникненні живлення у лабораторному комплексі-тренажері ГТУ плавне керування засувкою здійснюється від резервного джерела живлення. Тренажер гідротранспортної установки, що заявляється, дозволяє: - підвищити точність і інформативність визначення параметрів у регулювальних та аварійних режимах роботи гідротранспортної установки; - здійснити цілий ряд науково-практичних та теоретичних досліджень, підготовку інженерних кадрів відповідного профілю, є базою для перепідготовки і підвищення кваліфікації виробничого персоналу. 13 Комп’ютерна верстка А. Крулевський 58707 Підписне 14 Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюSimulator of hydro-transportation installation
Автори англійськоюKorenkova Tetiana Valeriivna, Serdiuk Oleksandr Oleksandrovych, Shokolov Volodymyr Mykolaiovych
Назва патенту російськоюТренажер гидротранспортной установки
Автори російськоюКоренькова Татьяна Валериевна, Сердюк Александр Александрович, Шоколов Владимир Николаевич
МПК / Мітки
МПК: F04D 27/00
Мітки: тренажер, гідротранспортної, установки
Код посилання
<a href="https://ua.patents.su/7-58707-trenazher-gidrotransportno-ustanovki.html" target="_blank" rel="follow" title="База патентів України">Тренажер гідротранспортної установки</a>
Спосіб роботи гідротранспортної установки та гідротранспортна установка
Номер патенту: 82200
Опубліковано: 25.03.2008
Автори: Франчук Всеволод Петрович, Кириченко Євген Олексійович, Євтєєв Володимир Васильович, Півняк Геннадій Григорович
МПК: F04D 29/00, F04D 13/00
Мітки: установка, роботи, гідротранспортної, спосіб, установки, гідротранспортна
Формула / Реферат:
1. Спосіб роботи гідротранспортної установки, що включає транспортування твердих часток у складі гідросуміші та подачу гідросуміші у всмоктувальний трубопровід насоса, який відрізняється тим, що попередньо задають величину швидкості обертання робочого колеса, через лопаті якого проходить потік гідросуміші всмоктувального трубопроводу насоса, в процесі підйому елементів підводних родовищ корисних копалин з глибини безперервно виводять тверді...
Модель ядерної енергетичної установки

Номер патенту: 17931
Опубліковано: 16.10.2006
Автори: Бандура Іван Миколайович, Фірсов Сергій Миколайович, Суховерська Оксана Петрівна
МПК: G06G 7/54
Мітки: ядерної, модель, установки, енергетичної
Формула / Реферат:
Модель ядерної енергетичної установки, що містить перший інтегратор, три суматори, антилогарифмуючий підсилювач, другий інтегратор, блок реєстрації, інерційну ланку, два датчики збурюючих впливів і п'ять інерційних ланцюжків, кожний з яких складається з двох послідовно з'єднаних інерційних ланок, виходи першого і другого датчиків збурюючих впливів підключені до входів першого і другого інтеграторів, вихід першого інтегратора з'єднаний з...
Тренажер оператора шахтної підйомної установки
Номер патенту: 54207
Опубліковано: 17.02.2003
Автори: Морозов Вячеслав Андрійович, Коваль Анатолій Миколайович, Пристром Володимир Адольфович, Толошний Сергій Іванович
Мітки: шахтної, тренажер, установки, підйомної, оператора
Формула / Реферат:
1. Тренажер оператора шахтної підйомної установки, що має пульт оператора з блоком відображення технологічної інформації, перша група виходів і входів якого з'єднана з першими входами і виходами блока моделювання підйомної установки, пульт інструктора, з'єднаний з відповідними входами-виходами згаданого блока моделювання, і блок оперативної пам'яті в складі блока моделювання, який відрізняється тим, що має блок довготермінової пам'яті і блок...
Пристрій контролю параметрів насосної установки
Номер патенту: 55324
Опубліковано: 17.03.2003
Автори: Чорний Олексій Петрович, Родькін Дмитро Йосипович, Пасмурских Олександр Олексійович, Коренькова Тетяна Валеріївна, Луговой Анатолій Васильович, Сісюк Генадій Юрійович
МПК: F04D 15/00
Мітки: установки, пристрій, контролю, параметрів, насосної
Формула / Реферат:
Пристрій контролю параметрів насосної установки, що містить перетворювач для живлення силового кола двигуна, асинхронний двигун, відцентровий насос, який відрізняється тим, що додатково обладнаний датчиком потужності на затискачах статора асинхронного двигуна, датчиками струму статора, напруги і частоти, першим, другим і третім суматорами, блоком визначення втрат двигуна, обчислювальним блоком для визначення фактичних параметрів насосної...
Демонстраційна модель насосної установки
Номер патенту: 62489
Опубліковано: 15.12.2003
Автори: Перекрест Андрій Леонідович, Костюк Юрій Сергійович, Родькін Дмитро Йосипович, Михайличенко Дмитро Анатолійович, Коренькова Тетяна Валеріївна
МПК: F04D 27/00
Мітки: установки, модель, насосної, демонстраційна
Формула / Реферат:
Демонстраційна модель насосної установки, що включає перший і другий насосні агрегати, з'єднані паралельно, перший і другий привідні двигуни однойменних насосних агрегатів, першу засувку на вході і другу засувку на подачі першого насоса, першу засувку на вході і другу засувку на подачі другого насоса, датчики тиску і продуктивності першого і другого насоса, яка відрізняється тим, що вона додатково обладнана третім насосним агрегатом,...
Попередній патент: Спосіб лікування хронічного обструктивного захворювання легень
Наступний патент: Ролик машини безперервного лиття заготовок
Випадковий патент: Спосіб виготовлення навчальних роздаткових матеріалів