Спосіб вимірювання прискорення, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Номер патенту: 61159
Опубліковано: 17.11.2003
Автори: Гуменюк Володимир Григорович, Леоненко Сергій Миколайович, Гаврилюк Володимир Леонідович, Олексієнко Микола Петрович, Васильєв Володимир Леонідович, Шкляр Володимир Петрович, Шервашидзе Володимир Варлаамович
Формула / Реферат
1. Спосіб вимірювання прискорення, за яким визначають переміщення інерційного елемента, який розміщують на об'єкті, прискорення якого підлягає вимірюванню, величину переміщення інерційного елемента перетворюють в електричний сигнал, на основі якого шляхом взаємодії його магнітного поля з полем постійного магніта, в якому інерційний елемент під впливом прискорення відхиляється від свого зрівноваженого положення, формують відповідну компенсаційну силу, під дією якої інерційний елемент повертається у первісний зрівноважений стан, по величині якої визначають величину прискорення, який відрізняється тим, що як інерційний елемент використовують чутливий елемент маятникового типу, переміщення якого здійснюється на гнучкому підвісові в зустрічно направлених полях постійних магнітів, а в первісне положення інерційний елемент повертають шляхом спрямування компенсаційної сили через центр ваги інерційного елемента.
2. Спосіб за п. 1, який відрізняється тим, що інерційний елемент переміщується в магнітному полі додаткового постійного магніта, яке направлене зустрічно до зустрічно спрямованих полів вказаних постійних магнітів.
3. Спосіб за пп. 1 або 2, який відрізняється тим, що формування компенсаційної сили здійснюють шляхом реєстрації переміщення чутливого елемента у двох точках у формі двох високочастотних сигналів u1 =U1 · sin![]() · t та u2 = U2 · sin
· t та u2 = U2 · sin![]() · t, де U1 та U2 - амплітуди високочастотних коливань сигналів відповідно в першій та другій точках,
· t, де U1 та U2 - амплітуди високочастотних коливань сигналів відповідно в першій та другій точках, ![]() -кругова частота живлення, а t - час, вказані сигнали перетворюють відповідно у сигнали (U1 -ΚU2) та -(U2 -КU1 ), де К<1, після чого отримують сумарний сигнал у формі U1(1+К ) - U2 (1+К), в якому амплітуда перетвореного сумарного електричного сигналу пропорційна величині відхилення чутливого елемента, а знак вказує на напрямок відхилення.
-кругова частота живлення, а t - час, вказані сигнали перетворюють відповідно у сигнали (U1 -ΚU2) та -(U2 -КU1 ), де К<1, після чого отримують сумарний сигнал у формі U1(1+К ) - U2 (1+К), в якому амплітуда перетвореного сумарного електричного сигналу пропорційна величині відхилення чутливого елемента, а знак вказує на напрямок відхилення.
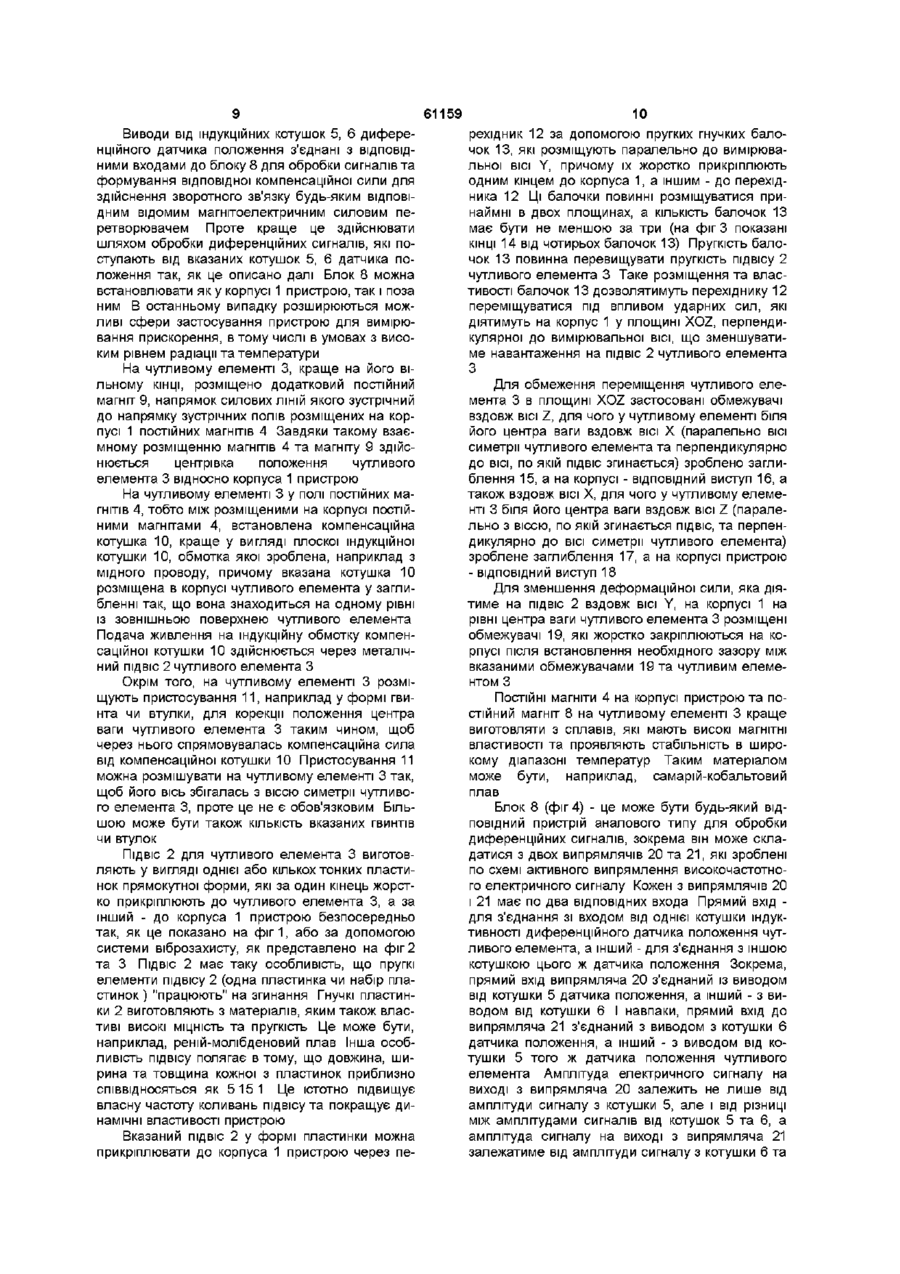
4. Пристрій для вимірювання прискорення, який включає розміщений за допомогою пругкого підвісу чутливий елемент маятникового типу, датчик положення, коло зворотного зв'язку магнітоелектричного силового перетворювача з компенсаційною котушкою та схема для визначення показника прискорення, який відрізняється тим, що чутливий елемент підвішено на гнучкому підвісові, компенсаційна котушка встановлена на чутливому елементі між розміщеними від неї із зазором плоскими постійними магнітами із зустрічною орієнтацією магнітних полів.
5. Пристрій за п. 4, який відрізняється тим, що на чутливому елементі встановлено постійний магніт, напрям магнітного поля якого зустрічний напрямку зустрічного магнітного поля плоских постійних магнітів.
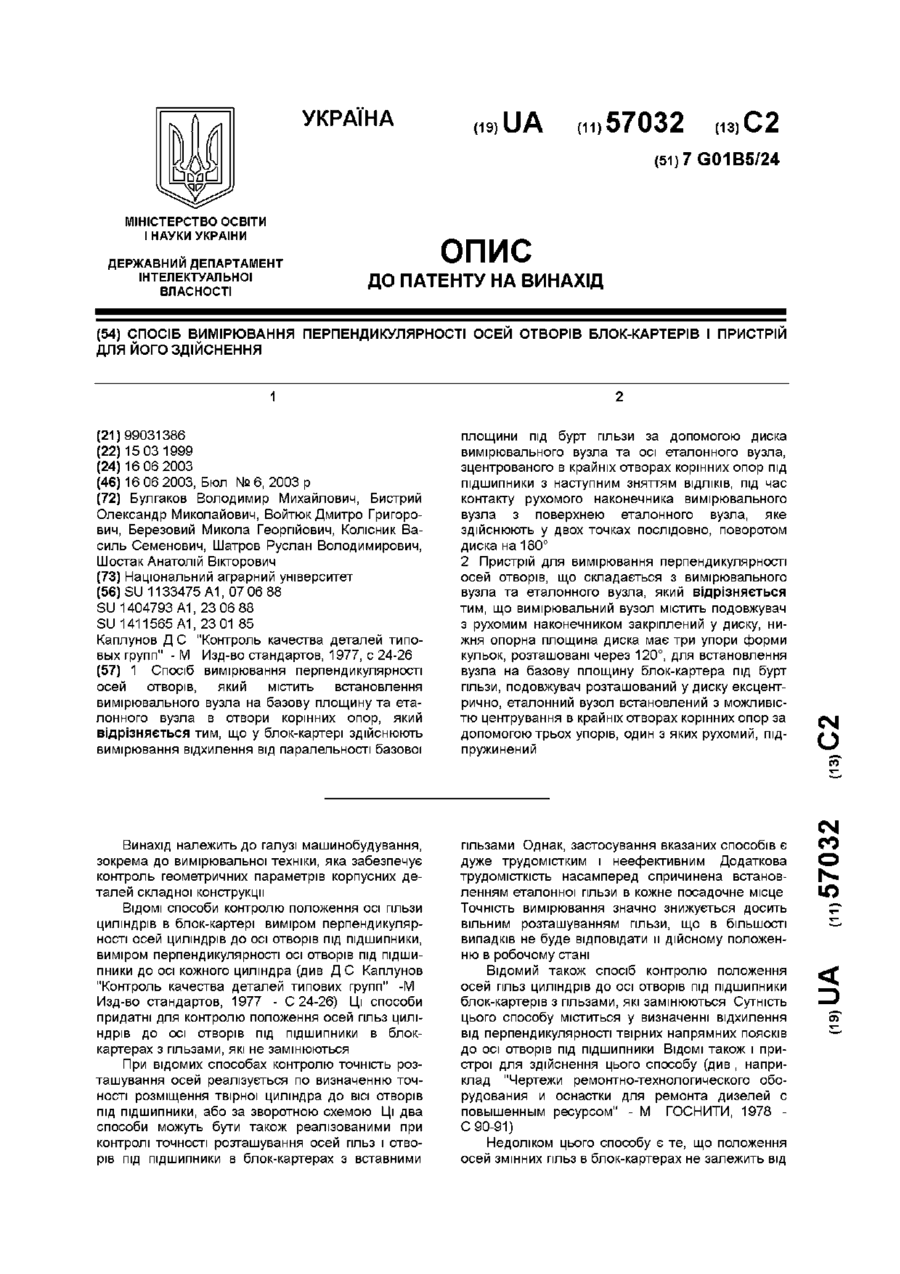
6. Пристрій за пп. 4 або 5, який відрізняється тим, що коло зворотного зв'язку містить два активні випрямлячі, кожен з яких має два відповідних входи, причому прямий вхід першого випрямляча з'єднаний із виводом із першої котушки індуктивності диференційного датчика положення чутливого елемента, а інший вхід першого випрямляча з'єднаний із виводом з другої котушки вказаного датчика положення, прямий вхід другого випрямляча з'єднаний з виводом з другої котушки індуктивності, а інший вхід другого випрямляча з'єднаний з виводом з першої котушки індуктивності диференційного датчика положення, виводи від вказаних випрямлячів з'єднані із відповідними входами до суматора.
7. Пристрій за пп. 4 або 5, або 6, який відрізняється тим, що до схеми визначення показника прискорення входять вимірювальний резистор, з'єднаний із входом до буферного підсилювача, який має коло для встановлення необхідного масштабу сигналу на виході пристрою та коло для встановлення нульового сигналу на виході буферного підсилювача при відсутності впливу прискорення на чутливий елемент.
8. Пристрій за будь-яким із попередніх пунктів, який відрізняється тим, що на чутливому елементі встановлено пристосування для регулювання положення центра ваги чутливого елемента.
9. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що гнучкий підвіс для чутливого елемента виготовлено у формі пластинки, ширина якої перевищує її довжину.
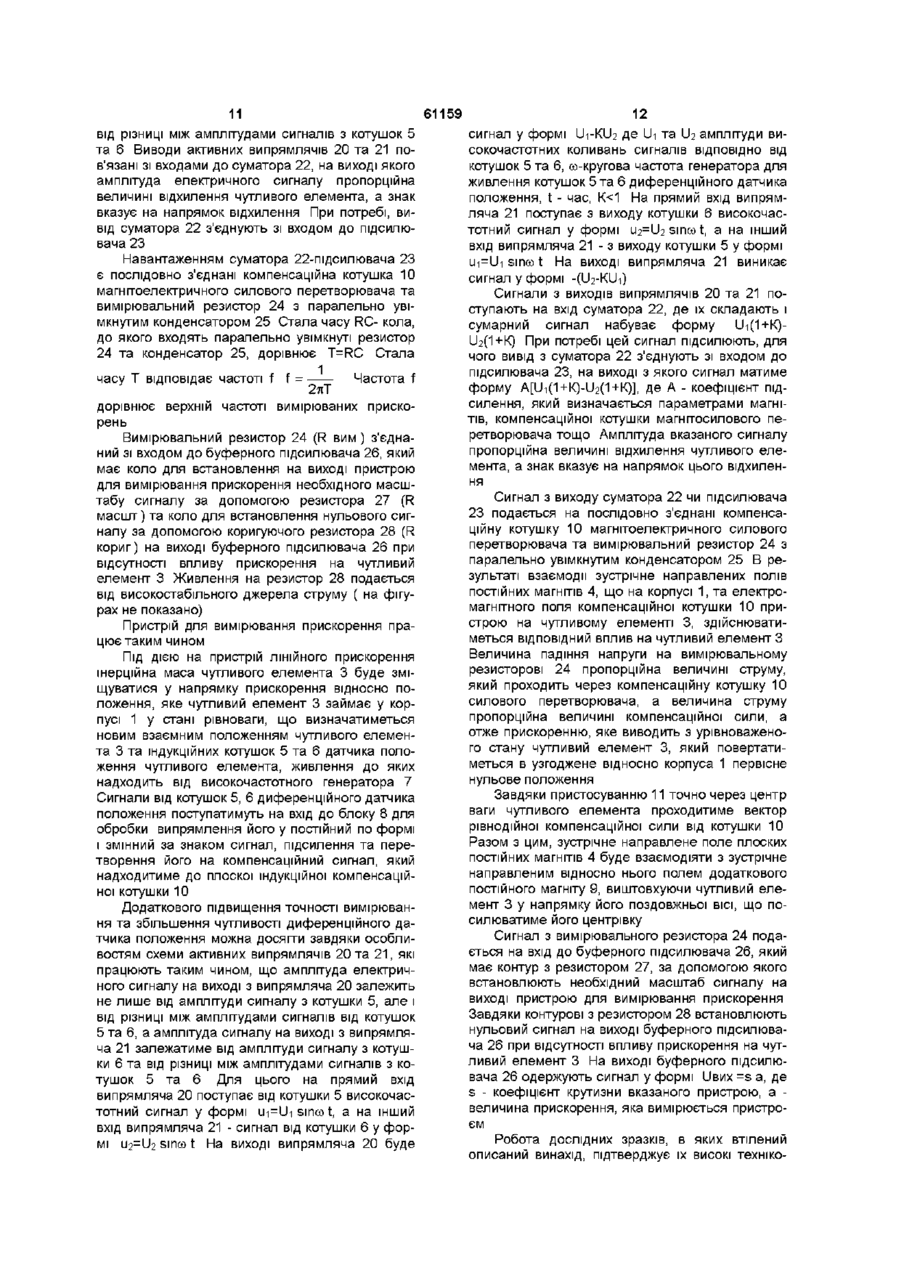
10. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що вказаний підвіс чутливого елемента прикріплено до корпусу пристрою через перехідник за допомогою пругких гнучких балочок, які жорстко прикріплені до корпусу та перехідника та розміщені принаймні в двох паралельних з вимірювальною віссю пристрою площинах, причому пругкість вказаних балочок більша за пругкість підвісу .
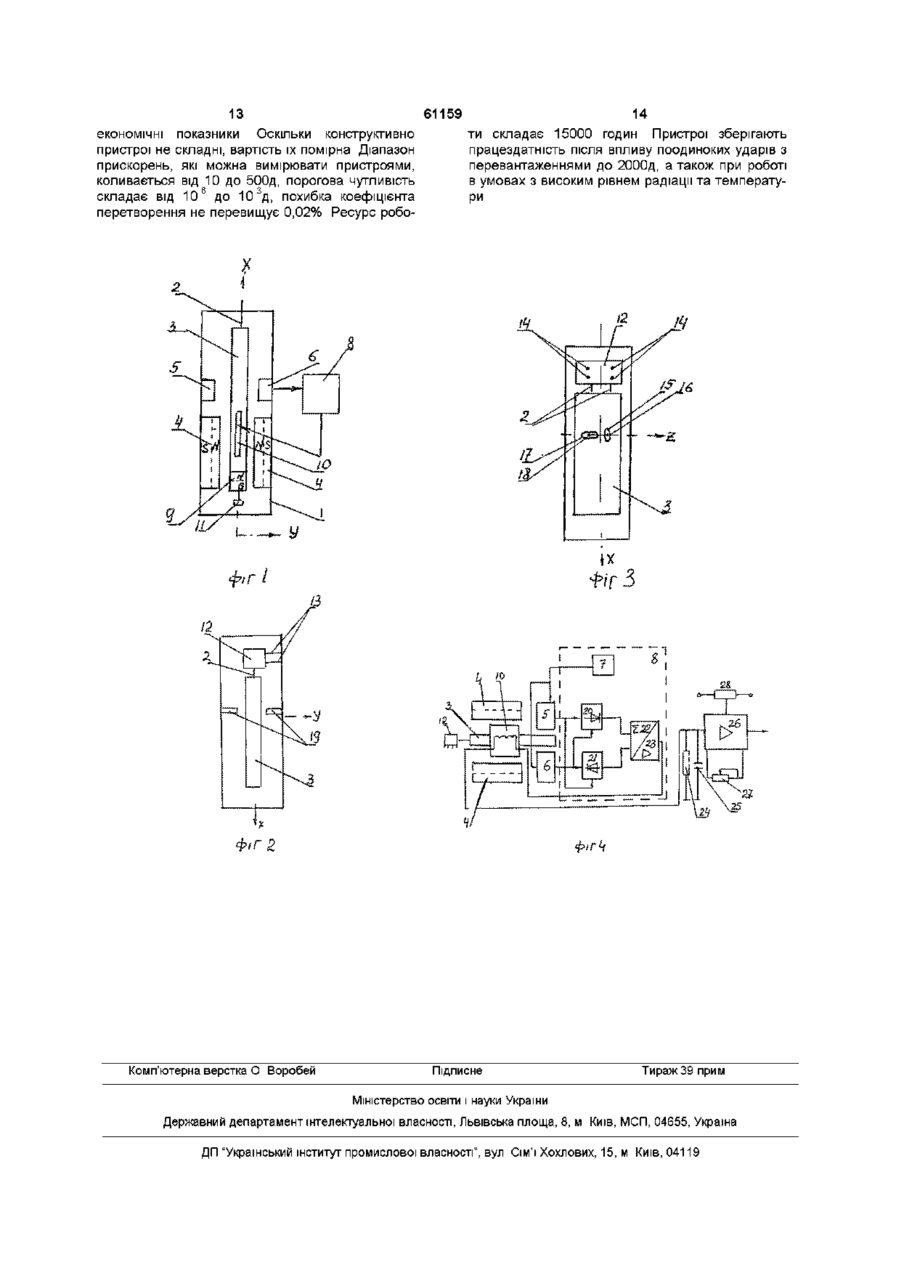
11. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що на корпусі пристрою на рівні центра ваги чутливого елемента паралельно з вимірювальною віссю розміщені обмежувачі.
12. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж його осі симетрії зроблене заглиблення, а на корпусі пристрою - відповідний виступ.
13. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що у чутливому елементі вздовж осі, перпендикулярної до осі симетрії чутливого елемента та паралельно з віссю, по якій згинається підвіс, виконане заглиблення, а на корпусі пристрою -відповідний виступ.
14. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що гнучкий підвіс виготовлено з міцного, пругкого та гнучкого матеріалу, зокрема з реній-молібденового плаву.
15. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що чутливий елемент виготовлено з електропровідного матеріалу.
16. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що компенсаційна котушка розміщена на чутливому елементі у заглибленні таким чином, що вона знаходиться на одному рівні із зовнішньою поверхнею чутливого елемента.
17. Пристрій за будь-яким з попередніх пунктів, який відрізняється тим, що котушки індуктивності диференційного датчика положення чутливого елемента розміщені на рівні вільного кінця чутливого елемента.
18. Блок обробки диференційних сигналів, який містить перетворювач, який відрізняється тим , що як перетворювач містить два випрямлячі, кожен з яких має по два входи для диференційних сигналів, прямий вхід першого випрямляча призначений для з'єднання з виводом від першого датчика диференційних сигналів, а інший вхід першого випрямляча - для з'єднання із виводом від другого датчика диференційних сигналів, прямий вхід другого випрямляча призначений для з'єднання із виводом від другого датчика диференційних сигналів, а інший вхід другого випрямляча призначений для з'єднання із виводом від першого датчика диференційних сигналів, виводи від першого та другого випрямлячів з'єднані із входами до суматора.
19. Блок за п. 18, який відрізняється тим, що вивід з суматора з'єднаний з підсилювачем.
Текст
1 Спосіб вимірювання прискорення, за яким визначають переміщення інерційного елемента, який розміщують на об'єкті, прискорення якого підлягає вимірюванню, величину переміщення інерційного елемента перетворюють в електричний сигнал, на основі якого шляхом взаємодії його магнітного поля з полем постійного магніта, в якому інерційний елемент під впливом прискорення відхиляється від свого зрівноваженого положення, формують відповідну компенсаційну силу, під дією якої інерційний елемент повертається у первісний зрівноважений стан, по величині якої визначають величину прискорення, який відрізняється тим, що як інерційний елемент використовують чутливий елемент маятникового типу, переміщення якого здійснюється на гнучкому ПІДВІСОВІ в зустрічно направлених полях постійних магнітів, а в первісне положення інерційний елемент повертають шляхом спрямування компенсаційної сили через центр ваги інерційного елемента 2 Спосіб за п 1 , який відрізняється тим, що інерційний елемент переміщується в магнітному полі додаткового постійного магніта, яке направлене зустрічно до зустрічно спрямованих полів вказаних постійних магнітів 3 Спосіб за пп 1 або 2, який відрізняється тим, що формування компенсаційної сили здійснюють шляхом реєстрації переміщення чутливого елемента у двох точках у формі двох високочастот них сигналів ui =Ui sin со t та U = U2 sin со t, 2 де Ui та ІІ2 - амплітуди високочастотних коливань сигналів ВІДПОВІДНО в першій та другій точках, Ю-кругова частота живлення, a t - час, вказані сигнали перетворюють ВІДПОВІДНО у сигнали (Ui -KU2) та -(ІІ2 -KUi ), де К
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod and device for measuring acceleration; differential signal processor for the device
Автори англійськоюLeonenko Serhii Mykolaiovych
Назва патенту російськоюСпособ и устройство для измерения ускорения; процессор разностного сигнала для устройства
Автори російськоюЛеоненко Сергей Николаевич
МПК / Мітки
МПК: G01P 15/13, G01P 15/00
Мітки: обробки, блок, диференційних, пристрій, пристрою, прискорення, здійснення, спосіб, вимірювання, сигналів
Код посилання
<a href="https://ua.patents.su/7-61159-sposib-vimiryuvannya-priskorennya-pristrijj-dlya-jjogo-zdijjsnennya-ta-blok-obrobki-diferencijjnikh-signaliv-dlya-pristroyu.html" target="_blank" rel="follow" title="База патентів України">Спосіб вимірювання прискорення, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою</a>
Спосіб вимірювання перпендикулярності осей отворів блок-картерів і пристрій для його здійснення
Номер патенту: 57032
Опубліковано: 16.06.2003
Автори: Шатров Руслан Володимирович, Шостак Анатолій Вікторович, Березовий Микола Георгійович, Колісник Василь Семенович, Войтюк Дмитро Григорович, Булгаков Володимир Михайлович, Бистрий Олександр Миколайович
МПК: G01B 5/24
Мітки: перпендикулярності, блок-картерів, осей, вимірювання, отворів, спосіб, здійснення, пристрій
Формула / Реферат:
1. Спосіб вимірювання перпендикулярності осей отворів, який містить встановлення вимірювального вузла на базову площину та еталонного вузла в отвори корінних опор, який відрізняється тим, що у блок-картері здійснюють вимірювання відхилення від паралельності базової площини під бурт гільзи за допомогою диска вимірювального вузла та осі еталонного вузла, зцентрованого в крайніх отворах корінних опор під підшипники з наступним зняттям відліків,...
Спосіб компенсації ехо-сигналів при дуплексному передаванні цифрових сигналів та пристрій для його здійснення
Номер патенту: 8026
Опубліковано: 26.12.1995
Автори: Хайнріх Зайлер, Геро Шольмайєр
МПК: H04B 3/20
Мітки: дуплексному, передаванні, спосіб, цифрових, компенсації, ехо-сигналів, здійснення, пристрій, сигналів
Формула / Реферат:
1. Способ компенсации эхо-сигналов при дуплексной передаче цифровых сигналов, заключающийся в том, что эхо-сигналы, вызванные цифровыми сигналами передачи, формируемыми передающим блоком передающей ветви дифференциальной системы, в приемном блоке приемной ветви дифференциальной системы вместе с принятыми через дифференциальную систему цифровыми сигналами приема образуют смесь сигналов, из которой вычитают сигналы компенсации,...
Спосіб перетворення сигналів і пристрій для його здійснення
Номер патенту: 25763
Опубліковано: 30.10.1998
Автор: Різник Володимир Васильович
МПК: H03M 7/02
Мітки: сигналів, спосіб, пристрій, здійснення, перетворення
Формула / Реферат:
1. Спосіб перетворення сигналів, який включає в себе підведення вхідних сигналів, вибір початкової комірки кільцевої структури, послідовний обхід комірок сигналом, вибір кінцевої комірки кільцевої структури, на якій закінчують обхід, формування вихідних сигналів з використанням ваг розрядів вихідного коду, який відрізняється тим, що формування вихідних сигналів здійснюють у відповідності з послідовно впорядкованими цілочисловими t-кортежами,...
Спосіб адаптивної цифрової фільтрації сигналів і пристрій для його здійснення
Номер патенту: 55522
Опубліковано: 15.04.2003
Автори: БОЙЧЕНКО ЮРІЙ ПЕТРОВИЧ, БАРАННИК ЄВГЕН ОЛЕКСАНДРОВИЧ, МАРУСЕНКО АНАТОЛІЙ ІЛАРІОНОВИЧ, ТОВСТЯК ВОЛОДИМИР ВАСИЛЬОВИЧ
МПК: G06F 15/18, G01S 15/00, A61B 8/00, G06F 17/10
Мітки: спосіб, пристрій, здійснення, фільтрації, адаптивної, цифрової, сигналів
Формула / Реферат:
1. Спосіб адаптивної цифрової фільтрації сигналів, який включає тренувальний процес для оптимального виявлення елемента структури об'єкта зондування, задання порогів прийняття рішень, отримання за допомогою цифрової фільтрації ряду оцінок вхідного сигналу, відображеного об'єктом зондування, обчислення імовірностей різних гіпотез відносно типу вхідного сигналу, обчислення відношень імовірностей і їх порівняння з порогами прийняття рішень,...
Пазонний спосіб перетворення сигналів та пристрій для його здійснення
Номер патенту: 53536
Опубліковано: 15.01.2003
Автори: Сліпченко Миколай Іванович, Чередніков Павло Ілліч, Бондаренко Михайло Федорович, Хом'яков Євгеній Вікторович
МПК: H03K 3/53, H03B 19/00
Мітки: спосіб, пазонний, сигналів, пристрій, перетворення, здійснення
Формула / Реферат:
1. Пазонний спосіб перетворення сигналів, що включає параметричне порушення коливань у коливальній системі з перемінними енергоємними параметрами, глибину модуляції яких задають відповідно до величини енергії накачування, збільшення енергії накачування і здійснення інтегральної модуляції енергоємного параметра одного з елементів системи, зміну коефіцієнта інтегральної модуляції реактивності системи від нуля до одиниці, збільшення середньої...
Попередній патент: Сіль 3-метиламіносульфолану і піколінової кислоти, яка має властивості регулятора росту рослин
Наступний патент: Спосіб вимірювання кутової швидкості, пристрій для його здійснення та блок обробки диференційних сигналів для пристрою
Випадковий патент: Стенд для випробування пальників