Гіроскопічна система


Формула / Реферат
Гіроскопічна система, що містить перший та другий гіромотори, закріплені в кардановому підвісі, яка відрізняється тим, що гіромотори розташовані на одній осі і закріплені в центрі карданового підвісу.
Текст
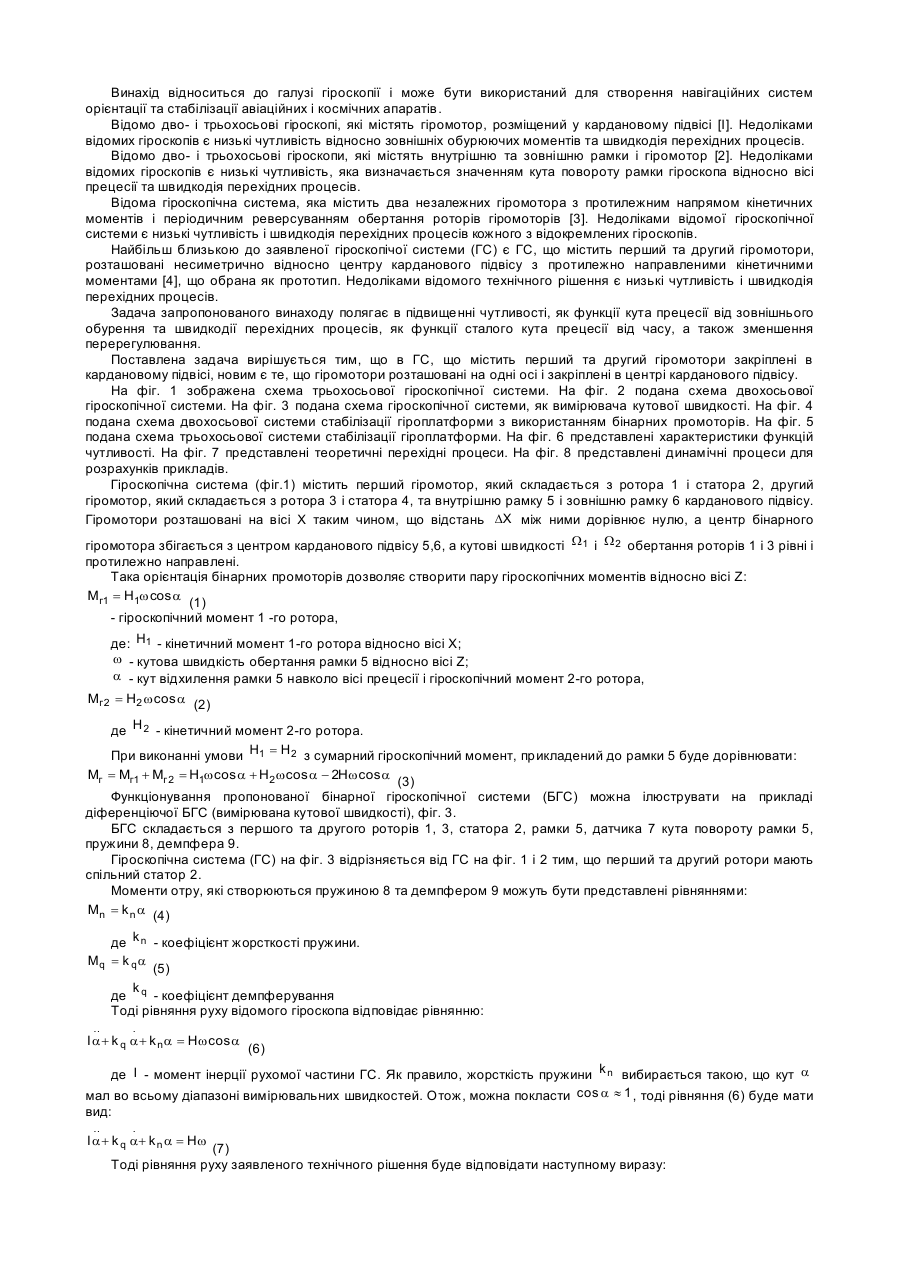
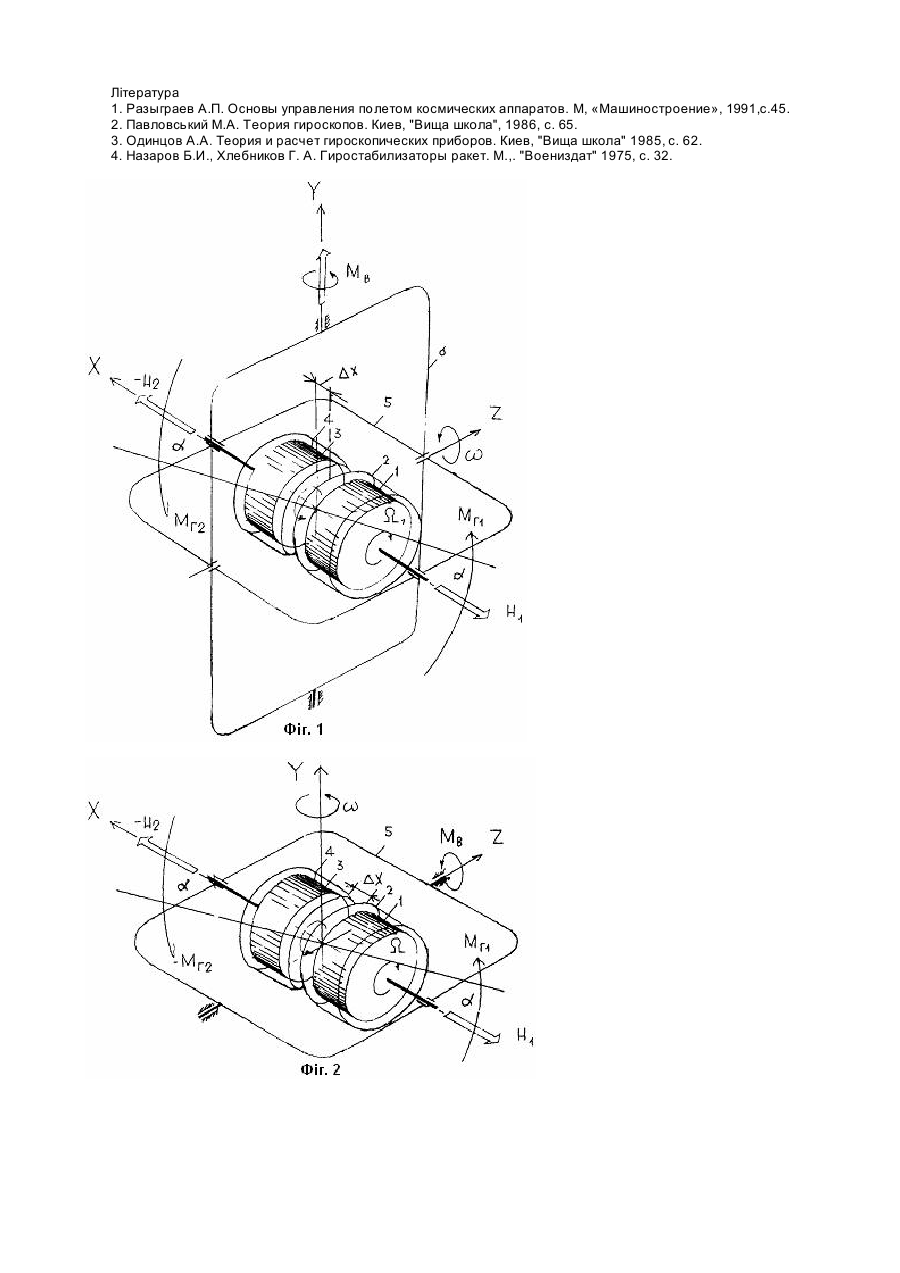
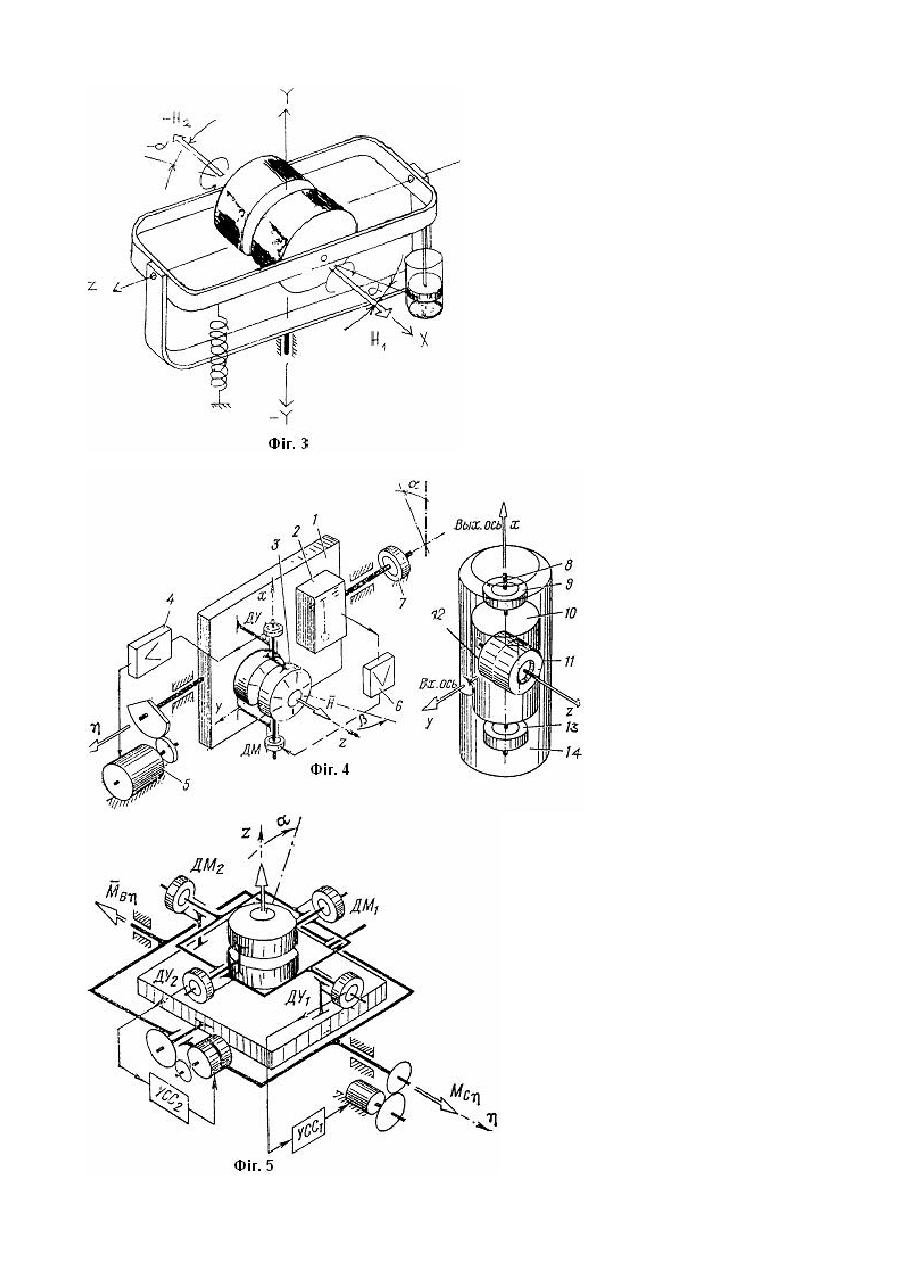
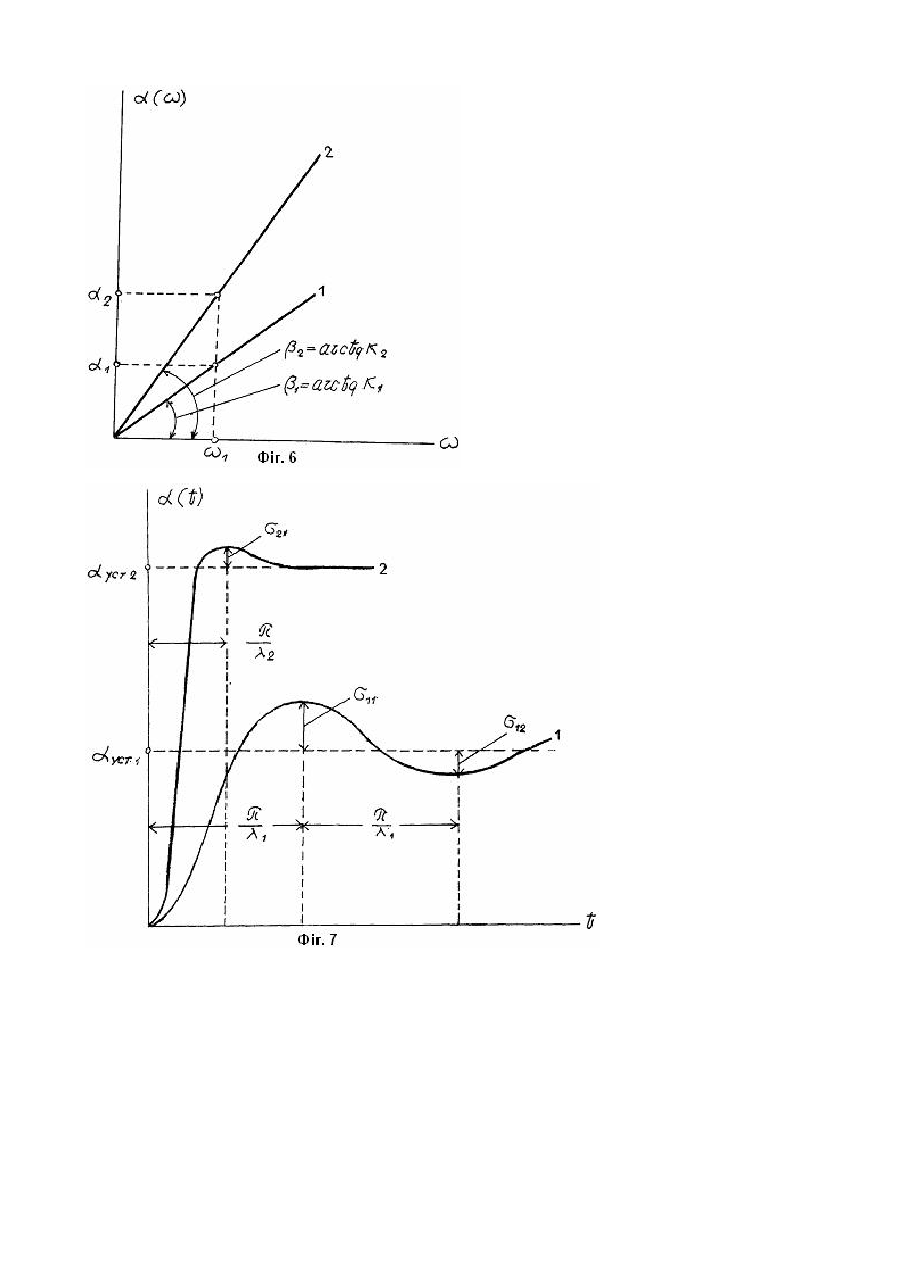
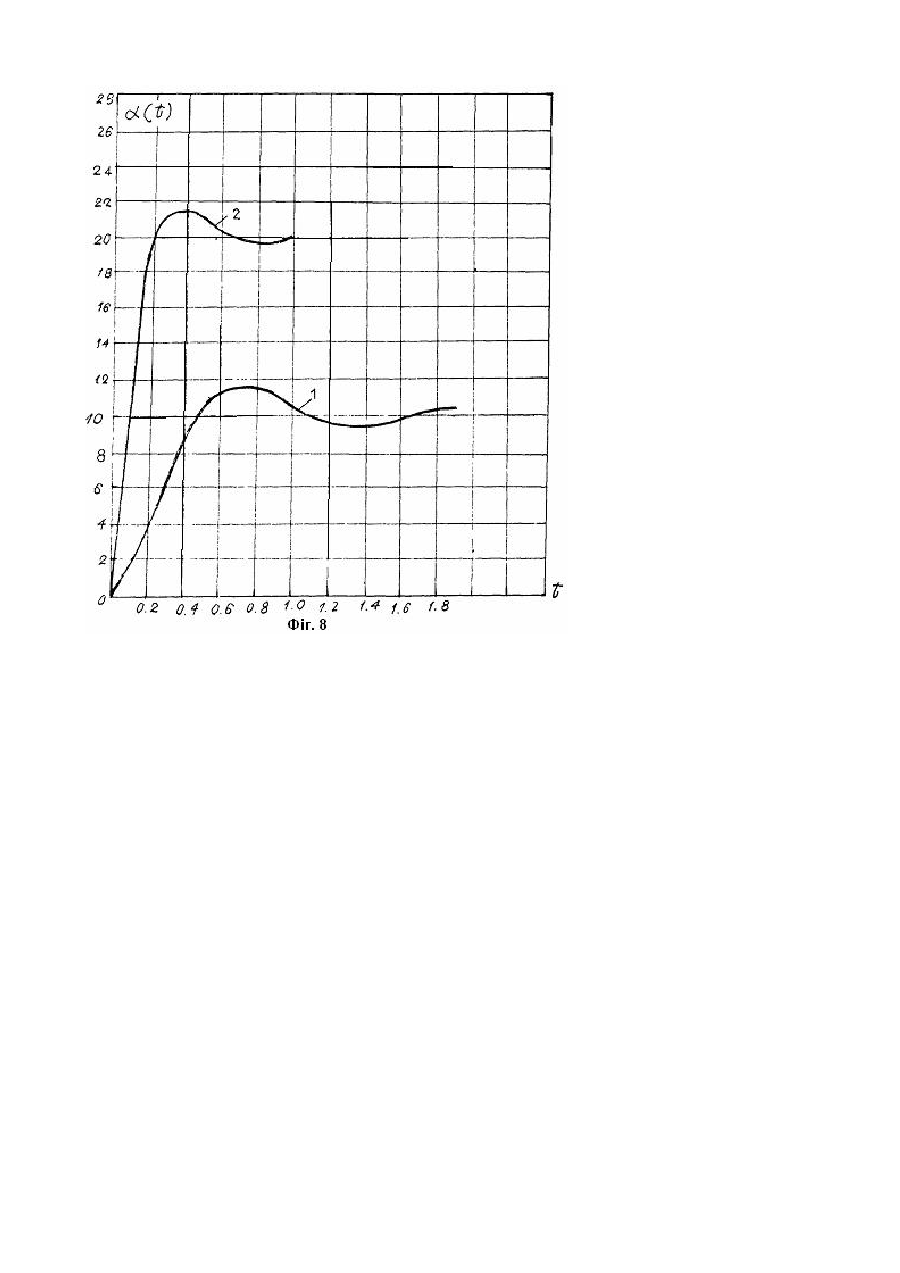
Винахід відноситься до галузі гіроскопії і може бути використаний для створення навігаційних систем орієнтації та стабілізації авіаційних і космічних апаратів. Відомо дво- і трьохосьові гіроскопі, які містять гіромотор, розміщений у кардановому підвісі [І]. Недоліками відомих гіроскопів є низькі чутливість відносно зовнішніх обурюючих моментів та швидкодія перехідних процесів. Відомо дво- і трьохосьові гіроскопи, які містять внутрішню та зовнішню рамки і гіромотор [2]. Недоліками відомих гіроскопів є низькі чутливість, яка визначається значенням кута повороту рамки гіроскопа відносно вісі прецесії та швидкодія перехідних процесів. Відома гіроскопічна система, яка містить два незалежних гіромотора з протилежним напрямом кінетичних моментів і періодичним реверсуванням обертання роторів гіромоторів [3]. Недоліками відомої гіроскопічної системи є низькі чутливість і швидкодія перехідних процесів кожного з відокремлених гіроскопів. Найбільш близькою до заявленої гіроскопічої системи (ГС) є ГС, що містить перший та другий гіромотори, розташовані несиметрично відносно центру карданового підвісу з протилежно направленими кінетичними моментами [4], що обрана як прототип. Недоліками відомого технічного рішення є низькі чутливість і швидкодія перехідних процесів. Задача запропонованого винаходу полягає в підвищенні чутливості, як функції кута прецесії від зовнішнього обурення та швидкодії перехідних процесів, як функції сталого кута прецесії від часу, а також зменшення перерегулювання. Поставлена задача вирішується тим, що в ГС, що містить перший та другий гіромотори закріплені в кардановому підвісі, новим є те, що гіромотори розташовані на одні осі і закріплені в центрі карданового підвісу. На фіг. 1 зображена схема трьохосьової гіроскопічної системи. На фіг. 2 подана схема двохосьової гіроскопічної системи. На фіг. 3 подана схема гіроскопічної системи, як вимірювача кутової швидкості. На фіг. 4 подана схема двохосьової системи стабілізації гіроплатформи з використанням бінарних промоторів. На фіг. 5 подана схема трьохосьової системи стабілізації гіроплатформи. На фіг. 6 представлені характеристики функцій чутливості. На фіг. 7 представлені теоретичні перехідні процеси. На фіг. 8 представлені динамічні процеси для розрахунків прикладів. Гіроскопічна система (фіг.1) містить перший гіромотор, який складається з ротора 1 і статора 2, другий гіромотор, який складається з ротора 3 і статора 4, та внутрішню рамку 5 і зовнішню рамку 6 карданового підвісу. Гіромотори розташовані на вісі Х таким чином, що відстань DX між ними дорівнює нулю, а центр бінарного гіромотора збігається з центром карданового підвісу 5,6, а кутові швидкості W 1 і W 2 обертання роторів 1 і 3 рівні і протилежно направлені. Така орієнтація бінарних промоторів дозволяє створити пару гіроскопічних моментів відносно вісі Z: Mг1 = Н1w cos a (1) - гіроскопічний момент 1 -го ротора, де: H1 - кінетичний момент 1-го ротора відносно вісі X; w - кутова швидкість обертання рамки 5 відносно вісі Z; a - кут відхилення рамки 5 навколо вісі прецесії і гіроскопічний момент 2-го ротора, Mг 2 = Н2 w cos a (2) де H 2 - кінетичний момент 2-го ротора. При виконанні умови H1 = H 2 з сумарний гіроскопічний момент, прикладений до рамки 5 буде дорівнювати: Mг = Мг1 + Мг 2 = Н1w cos a + H2 w cos a - 2Hw cos a (3) Функціонування пропонованої бінарної гіроскопічної системи (БГС) можна ілюструвати на прикладі діференціючої БГС (вимірювана кутової швидкості), фіг. 3. БГС складається з першого та другого роторів 1, 3, статора 2, рамки 5, датчика 7 кута повороту рамки 5, пружини 8, демпфера 9. Гіроскопічна система (ГС) на фіг. 3 відрізняється від ГС на фіг. 1 і 2 тим, що перший та другий ротори мають спільний статор 2. Моменти отру, які створюються пружиною 8 та демпфером 9 можуть бути представлені рівняннями: Mn = k n a (4) де k n - коефіцієнт жорсткості пружини. Mq = k q a (5) k де q - коефіцієнт демпферування Тоді рівняння руху відомого гіроскопа відповідає рівнянню: .. . I a + k q a + k n a = Hw cos a (6) де I - момент інерції рухомої частини ГС. Як правило, жорсткість пружини k n вибирається такою, що кут a мал во всьому діапазоні вимірювальних швидкостей. Отож, можна покласти cos a » 1 , тоді рівняння (6) буде мати вид: .. . I a + k q a+ k n a = H w (7) Тоді рівняння руху заявленого технічного рішення буде відповідати наступному виразу: .. . AI a+ k q a + k n a = BHw (8) де A - коефіцієнт визначення моменту інерції І; B - коефіцієнт визначення кінетичного моменту, наприклад: .. . 2I a+ k q a + k n a = 2Hw (9) Для такого типу датчиків та поплавкових гіроскопів стале значення відділення рамки 5 визначається значенням вимірюваної кутової швидкості H ac = w kn (10) Характеристика чутливості відповідно рівнянню (10) приведена на фіг. 4, поз. 1. Отже, для заявленої гіроскопічної системи характеристика чутливості має вид: 2H ac = w kn (11) і приведена на фіг. 4 поз. 2, що доказує підвищення чутливості БГС порівняно з прототипом. Динамічні характеристики однороторного гіроскопа визначаються його передаточною функцією: W1 ( s ) = 2 k w0 a 1( s ) = w(s ) s 2 + 2 xw0 s + w 2 0 (12) H k= k n - коефіцієнт пропорційності між a c і w де w0 = x= kn I - власна частота kq 2 1k n - коефіцієнт затухання тоді для БГС W( s ) = де: x= 2 1 .114k w0 a 2 (s ) = w(s ) s 2 + 0 .249xw0 s + 0. 707w 2 0 w0 = 0. 5k q 2Ik n (13) k kn = 0.707 n I AI = 0.353k q Ik n Знамения власної частоти w необхідно вибирати набагато більшою максимального значення частоти зміни вимірювальної швидкості. Для отримання задовільної якості перехідних процесів коефіцієнт затухання x , звичайно вибирають 0,4-0,7. Рівняння (12) в стандартній формі записується в наступному виді: a (s) k1 = W1 ( s ) = 1 2 2 w(s ) T1 s + 2xT1s + 1 (14) де T - постійна часу. Перехідний процес відповідно рівнянню (14) має вид: xt é ù - 1 1 e T1 sin( lT1 + Q 1 )ú a1 ( t ) = kê1 ê l T ú 1 1 ê ú ë û (15) l1 = 2 1 - x1 xp Q1 = arctg l 1T1 s 1 = k 1e l1T1 x1 T1 , де: Перехідний процес відповідно (15) подано на фіг. 7, поз. 1. Отож для БГС маємо: 2k W 2 ( s) = 2 2 T2 s + 0.707xT2 s + 1 (16) x 2t é ù 1 a 2 ( t ) = k 2 ê1 e T2 sin(l 2 t + Q 2 )ú ê l T ú 2 2 ê ú ë û (17) Перехідний процес відповідно рівнянню (17) приведено на фіг. 7, поз. 2. Порівняльний аналіз цих процесів показує, що швидкодія процесу поз. 2 і вище швидкодії поз. 1, так як період коливання поз. 1 p p p l2 l1 Для доказу перевага заявленої БГС наведемо розрахункові приклади. Приклад 1. Нехай передаточна функція відповідно рівнянню (11) має вид: a ( s) 10 = W1 ( s) = 1 0 w( s ) 0.04s + 0. 2s + 1 Де T = 0 .8 x1 = 0.5 Корні характеристичного рівняння 0 .01s 2 + 0 .2 s + 1 s = - 2. 5 ± 4.325 / дорівнюють 1,2 Веществена частина 1,5 показує коефіцієнт затухання перехідного процесу, мніма 4,325 - частоту затухаючих коливань, відкіль частота власних коливань дорівнює w0 = 6.25 + 18.705 = 5 x= 2.5 =5 5 а параметр затухання Функція чутливості a10 = 10w , а перехідний процес відповідає рівнянню [ a1 ( t ) = 10 1 - 1.033e -2.5 t sin(4.841t ) = Q 1 і приведено на фіг. 8, поз. 1: де X1 = ] 1 - 0. 0625 4 .43Q1 = arctg1 .772 0. 8 s1 = 10e -1. 6 = 2 s2 = 10e -3.2 = 0.48 ln s1 s2 = 1 .428 p 3. 14 = = 0 .7 l 1 4 .43 Період коливання дорівнює Приклад 2. Передаточна функція БГС 20 W 2 ( s) = 2 0.01s + 0 .14s + 1 Де T = 0.1 , а x = 0. 7 2 Корені характеристичного рівняння 0 .1s + 0.14 s + 1 = 0 s = - 7 ± 7 .141 i Дорівнюють 1,2 Функція чутливості має вид a 2 = 20w , що свідчить про підвищення чутливості у 2 рази. Перехідний процес [ ] a 2 ( t ) = 20 1 - 0. 714e -7 t sin( 7.141t + Q) представлено на фіг. 8, поз.2 де l2 = 1 - 0 .49 = 7.141 0. 1 Q 2 = arctg1. 02 s1 = 20e -3. 078 = 0.996 s 2 = 20e -6.151 = 0.4 w0 = 49 + 50 = 10 x= 7 = 0 .7 10 p 3. 14 = = 0 .4 l2 7. 141 період коливань дорівнює . Порівняння отриманих перехідних процесів фіг. 8, поз. 1 і 2 доказують підвищення швидкодії в 1.5 разів і, крім того, зменшення перерегулювання. В 1-му випадку воно складає s1 = 18.8% , що перевищує допустиму норму s1 = 5 %5% , а в другому випадку s = 4 .98% , що відповідає допустимим нормам. Приведені розрахункові приклади свідчать про досягнення поставлених задач. Література 1. Разыграев А.П. Основы управления полетом космических аппаратов. М, «Машиностроение», 1991,с.45. 2. Павловський М.А. Теория гироскопов. Киев, "Вища школа", 1986, с. 65. 3. Одинцов А.А. Теория и расчет гироскопических приборов. Киев, "Вища школа" 1985, с. 62. 4. Назаров Б.И., Хлебников Г. А. Гиростабилизаторы ракет. М.,. "Воениздат" 1975, с. 32.
ДивитисяДодаткова інформація
Назва патенту англійськоюGyroscopic system
Назва патенту російськоюГироскопическая система
МПК / Мітки
МПК: G01C 21/04
Мітки: гіроскопічна, система
Код посилання
<a href="https://ua.patents.su/7-67575-giroskopichna-sistema.html" target="_blank" rel="follow" title="База патентів України">Гіроскопічна система</a>
Система автоматичного управління
Номер патенту: 29261
Опубліковано: 16.10.2000
Автор: Самедов Юсіф Фахрат огли
МПК: G05B 11/42
Мітки: система, автоматичного, управління
Формула / Реферат:
Система автоматичного управління, яка містить елемент порівняння, перший вхід якого є входом системи, а другий вхід є з'єднаний з виходом об'єкта управління, вхід якого підключений до виходу суматору, два підсилювача, де вихід першого підсилювача з'єднаний з першим входом суматора, інтегратор, диференціатор, до виходу якого першим входом підключений підсумуючий підсилювач, а його другий вхід зв'язаний з виходом елемента порівняння і входом...
Система орієнтації рухомого об”єкта
Номер патенту: 47791
Опубліковано: 15.07.2002
Автор: Снігур Анатолій Кирилович
МПК: G01C 21/00
Мітки: система, орієнтації, об'єкта, рухомого
Формула / Реферат:
1. Система орієнтації рухомого об'єкта, що містить датчики кутової швидкості, осі чутливості яких розміщені в ортогональній системі координат, і обчислювальну машину, яка відрізняється тим, що осі чутливості датчиків збігаються з твірною конуса, при цьому вісь останнього сполучена з однією з геометричних осей прямування об'єкта.2. Система за п. 1, яка відрізняється тим, що осі чутливості датчиків розподілені рівномірно по поверхні...
Система приймальних індукційних перетворювачів
Номер патенту: 34352
Опубліковано: 15.02.2001
Автори: Яворський Ігор Миколайович, Михайлишин Віктор Юрійович, Драбич Олег Петрович, Вакульський Олександр Андрійович, Лозинський Андрій Михайлович, Драбич Петро Петрович
МПК: G01R 31/02, G01V 3/10
Мітки: перетворювачів, система, приймальних, індукційних
Текст:
...глибини його залягання і струму, що протікає по ньому. Для підтвердження ефективності використання системи непаралельних індукційних перетворювачів у табл. 2 і 3 наведені результати обчислень відстані по горизонталі l1 і l2 від початку осі х, глибин залягання h1 і h2 та струмів I1 і I2 при одночасному проходженні синфазних струмів силою в 1А по двох струмопроводах, які залягають на глибині 2 м, і осі яких лежать на відстані 2 м (фіг....
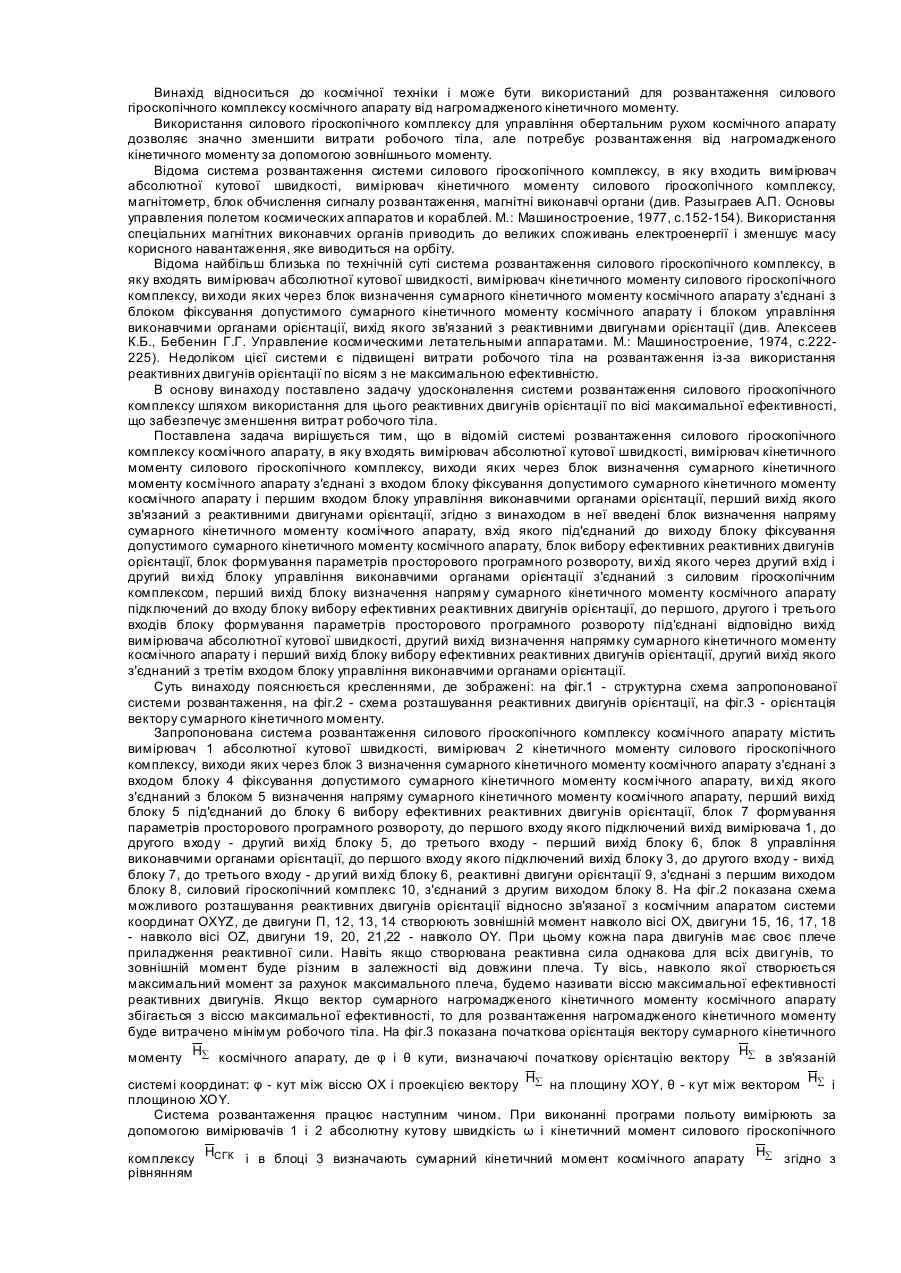
Система розвантаження силового гіроскопічного комплексу космічного апаратa
Номер патенту: 64339
Опубліковано: 16.02.2004
Автори: Голоскоков Євген Григорович, Бандура Іван Миколайович, Кузнєцов Юрій Олексійович, Успенський Валерій Борисович
МПК: B64G 1/24
Мітки: розвантаження, гіроскопічного, комплексу, апарата, силового, космічного, система
Формула / Реферат:
Система розвантаження силового гіроскопічного комплексу космічного апарата, в яку входять вимірювач абсолютної кутової швидкості, вимірювач кінетичного моменту силового гіроскопічного комплексу, виходи яких через блок визначення сумарного кінетичного моменту космічного апарата з'єднані з входом блока фіксування допустимого сумарного кінетичного моменту космічного апарата і першим входом блока управління виконавчими органами орієнтації, перший...
Спосіб завантаження даних, приймач-декодер, система передавання та система передавання і приймання для його здійснення
Номер патенту: 63976
Опубліковано: 16.02.2004
Автор: Сарфаті Жан-Клод
Мітки: завантаження, приймання, даних, передавання, здійснення, система, спосіб, приймач-декодер
Формула / Реферат:
1. Спосіб завантаження даних в приймач-декодер, який включає виконання в приймачі-декодері таких операцій:приймання бітового потоку, що містить згадані дані;завантаження завантажувача для завантаження згаданих даних з бітового потоку в приймач-декодер; ізавантаження згаданих даних з бітового потоку з використанням згаданого завантаженого завантажувача даних.2. Спосіб за п. 1, який відрізняється тим, що завантажений...
Попередній патент: Спосіб виявлення дефектного приповерхневого шару оптичного скла
Наступний патент: Фільтрувальна тканина
Випадковий патент: Спосіб коригуючої скорочуючої вертебротомії при застарілих травматичних кіфозах в поперековому і грудопоперековому відділах хребта