Спосіб моделювання технологічного навантаження при випробуванні машин постійного струму
Номер патенту: 70516
Опубліковано: 15.10.2004
Автори: Скворцов Ігор Валерійович, Артеменко Артем Миколайович, Зачепа Юрій Володимирович, Мастєровий Віктор Яковлевич, Родькін Дмитро Йосипович

Формула / Реферат
1. Спосіб навантаження електричного двигуна постійного струму незалежного збудження, що полягає в створенні струмового навантаження шляхом підключення якоря двигуна до джерела низькочастотної змінної напруги, вимірюванні швидкості та струму якоря, нормуванні розрахункового струмового навантаження шляхом зміни амплітуди та частоти низькочастотної змінної напруги, який відрізняється тим, що для підвищення достовірності процесу навантаження та діагностики параметрів двигуна обчислюють параметри управляючих сигналів якірного ланцюга та обмотки збудження на основі конструктивних параметрів для даного типу електричних машин, формують відповідно з отриманими величинами управляючі сигнали, що відповідають технологічному процесу, задають температуру навколишнього середовища, задають управляючі сигнали у системи керування, здійснюють контроль цих параметрів, вимірюють фактичні та порівнюють із заданими параметрами режиму навантаження, розраховують втрати енергії, пов'язані з процесом перемагнічування сталі якоря в режимі навантаження та технологічному режимі:
![]()
![]() ,
,
де ![]() - постійні коефіцієнти,
- постійні коефіцієнти,
![]() - напруга на якорі двигуна,
- напруга на якорі двигуна,
![]() - струм збудження,
- струм збудження,
![]() – час циклу роботи,
– час циклу роботи,
розраховують кількість повітря, що необхідна для охолодження машини:
![]() ,
,
де ![]() - сумарні втрати енергії в машині постійного струму при випробуванні,
- сумарні втрати енергії в машині постійного струму при випробуванні,
![]() - сумарні втрати енергії в машині постійного струму в технологічному циклі,
- сумарні втрати енергії в машині постійного струму в технологічному циклі,
задають швидкість обертання вентилятора, вимірюють фактичну температуру навколишнього середовища та порівнюють із заданою, порівнюють задані та фактичні параметри, за результатами порівняння роблять висновок про експлуатаційну працездатність випробуваної електричної машини.
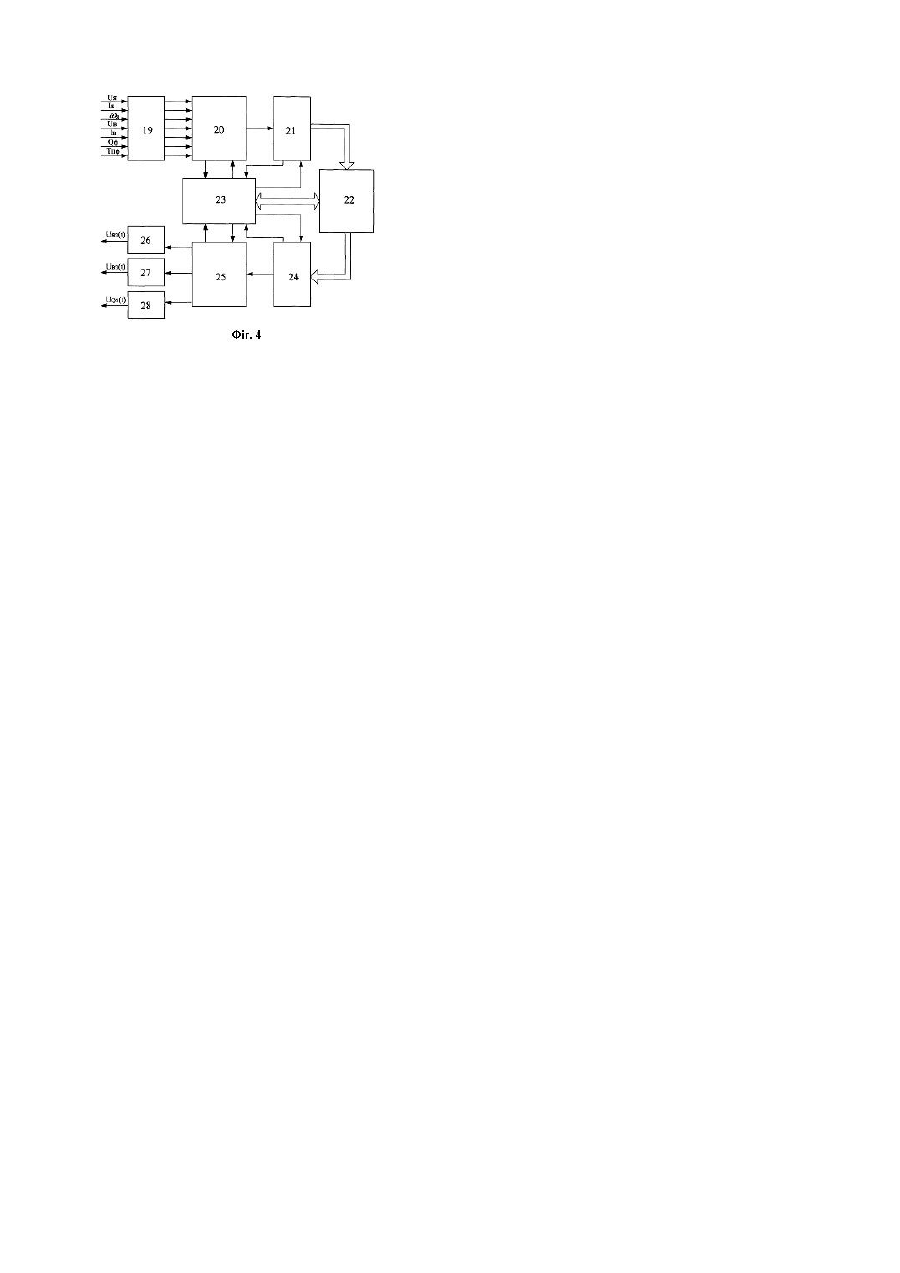
2. Пристрій для моделювання технологічного навантаження, що включає перетворювач напруги, який з'єднаний через датчик струму з якірним ланцюгом машини, напруга на якому контролюється датчиком, збуджувач, з'єднаний через датчик струму з обмоткою збудження, напруга на якій контролюється датчиком, датчик швидкості обертання, який відрізняється тим, що для поліпшення теплового режиму пристрій додатково оснащений обчислювальним блоком, регулятором швидкості обертання вентилятора, датчиком продуктивності, регулятором продуктивності, датчиком температури навколишнього середовища, причому 1-5 входи обчислювального блока з'єднані з виходами датчика напруги якірного ланцюга, датчика струму якірного ланцюга, датчика швидкості обертання випробуваного двигуна, датчиком напруги обмотки збудження та датчиком струму обмотки збудження відповідно, 6-7 входи з'єднані з виходами датчика температури навколишнього середовища та датчиком фактичної продуктивності вентилятора, виходи 1-3 обчислювального блока підключені до виходів системи керування якірним перетворювачем, системи керування силовим збуджувачем та системи керування регулятором швидкості обертання вентилятора відповідно, вхід 8 зв'язаний з виходом блока введення інформації, вихід 4 з'єднаний з блоком візуалізації, крім цього за допомогою обчислювального блока визначають параметри управляючих сигналів якірного ланцюга та обмотки збудження, втрати потужності в режимі навантаження та технологічному режимі, кількість повітря, що необхідна для охолодження машини.
Текст
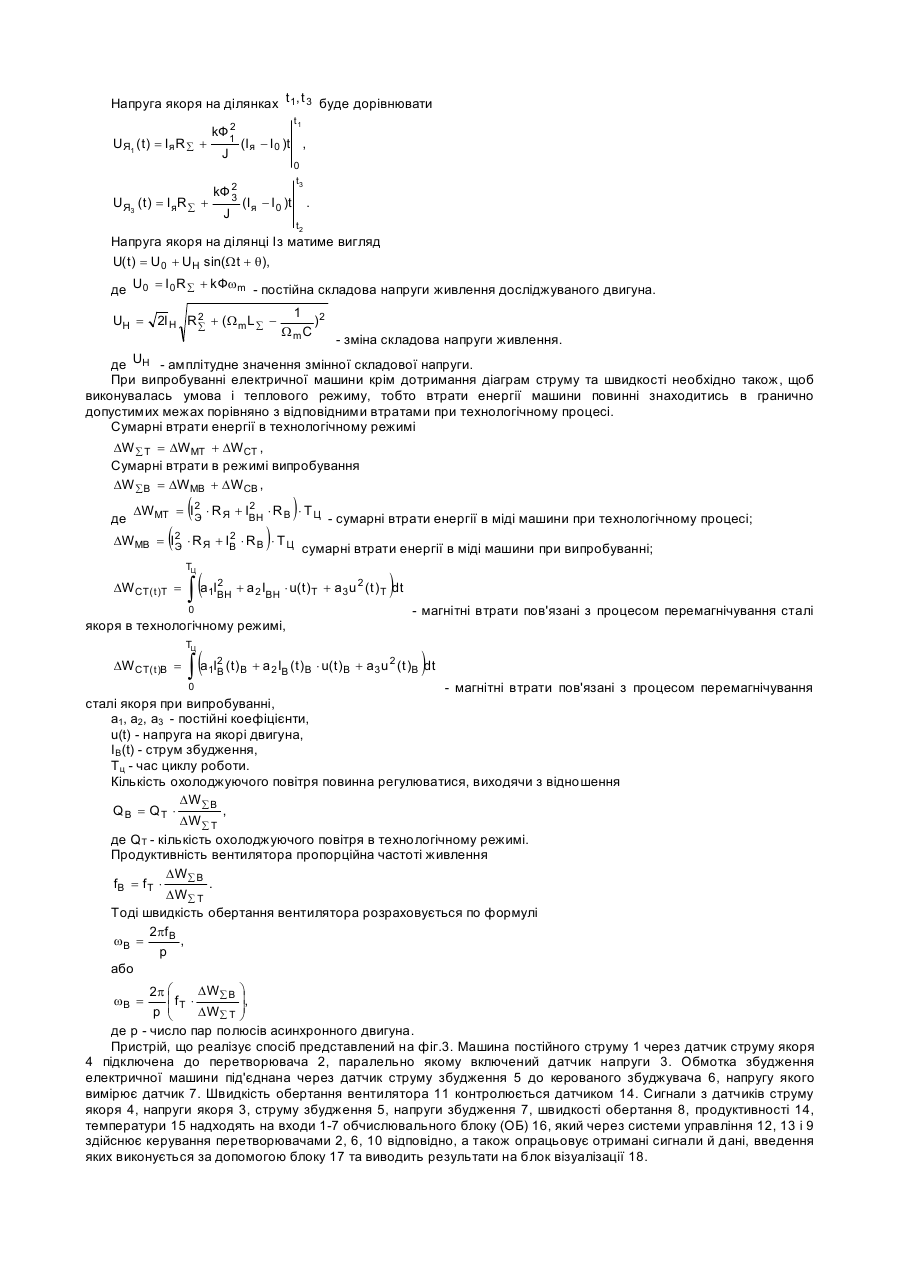
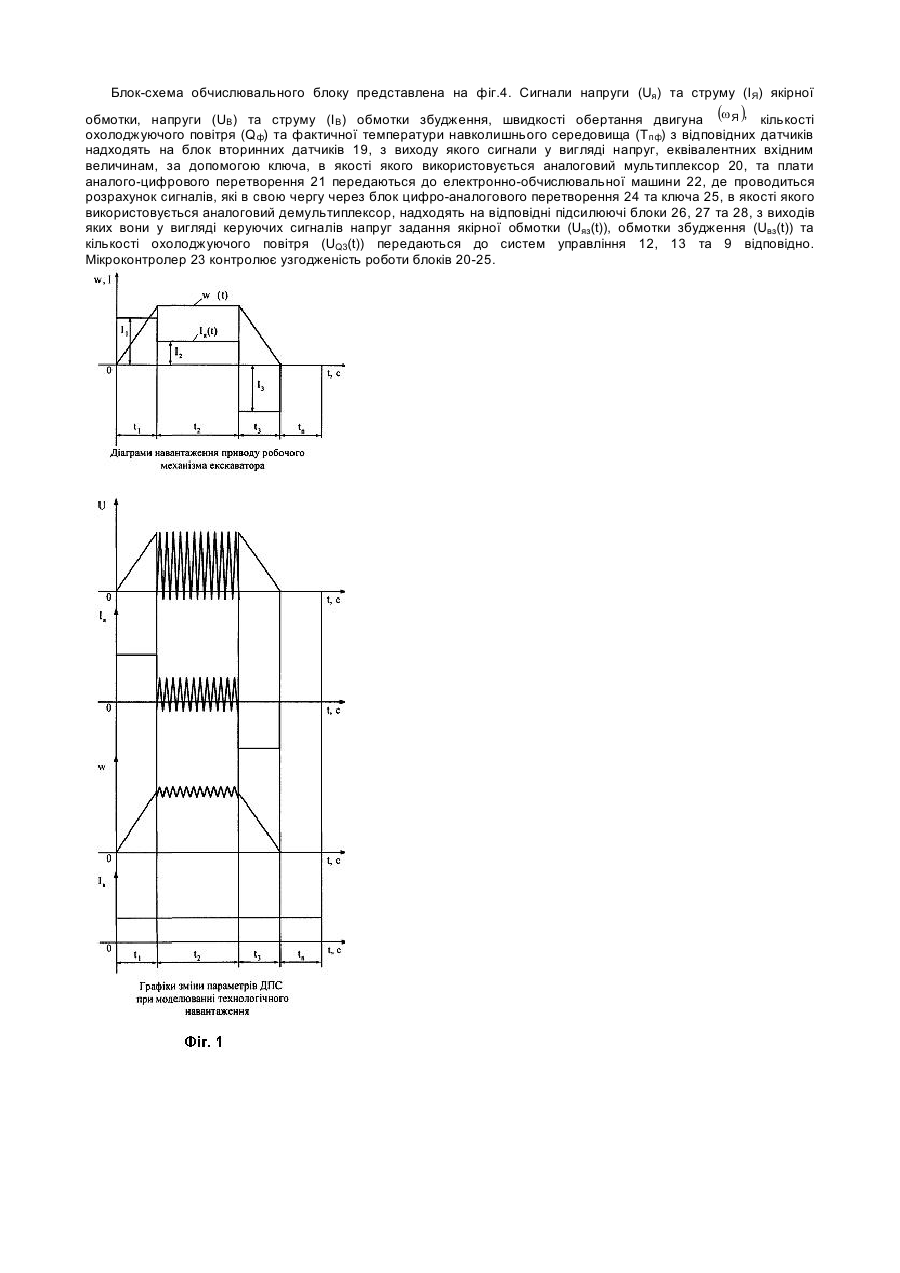
Винахід відноситься до електротехніки і може бути використаний при випробуваннях електричних машин постійного струму, а також на машинобудівних підприємствах. Випробування електричних машин постійного струму під навантаженням, як правило здійснюється при наявності двох електричних машин, зв'язаних між собою механічно (за допомогою муфти або редуктором безпосередньо). Такі системи є малоефективними при проведенні після ремонтних випробувань електричних машин різного типономіналу, так як потребують демонтажу і встановлення на випробному стенді. Відомий спосіб навантаження двигунів постійного струму динамічним навантаженням (пат. ДДР G01R31/34 №216331, Спосіб перевірки під навантаженням двигуна постійного струму), здійснюваний шляхом формування низькочастотної напруги, виміру струму якоря і напруги живлення, визначення діагностичних ознак за допомогою виміру кута повороту в одному й іншому напрямках обертання при зміні полярності прикладеної напруги. Модифікація цього методу включає розробку моделі - двигуна постійного струму аналогічного випробуваній конструкції, фіксування навантажувальних параметрів випробуваного двигуна і моделі, порівняння отриманих результатів при встановлених для іспиту допусках. Недолік способу: на якір машини подається напруга, від якої залежать навантажувальні параметри - струм і швидкість, але в процесі навантаження не можуть бути сформовані так, як необхідно для створення режиму роботи, з еквівалентними втратами, близькими до номінальних. Відомий спосіб і пристрій не дозволяють відображати параметри навантажувального режиму, у пристрої, який реалізує спосіб необхідна фізична модель двигуна, що не завжди можливо, тому що при широкій номенклатурі ремонтованих машин необхідний цілий парк таких моделей; при циклічній зміні напрямку обертання двигуна (із середнім значенням швидкості, близьким до нуля) можливі такі частоти впливу, при яких колекторні пластини і якірні обмотки навантажуються струмом нерівномірно. Очевидно, що достовірної діагностики параметрів двигуна при цьому не буде. Відомий пристрій контролю температури вузлів електричної машини постійного струму (АС №1229883 (51) МКИ Н02Н5/04 07.05.1986 Бюл. №17 Пристрій для контролю температури електроустановки постійного струму), у якому діагностика параметрів електричної машини здійснюється шляхом контролю температури струмоведучих частин машини, при її роботі під навантаженням за допомогою відповідних датчиків струму. При цьому інші параметри електричної машини не контролюються. Таким чином, недоліком пристрою, є недостовірність процесу контролю температури, тому що температура машини визначається не тільки втратами енергії на омічному опорі струмоведучих частин машини. Відомий спосіб навантаження двигунів постійного струму незалежного збудження, при якому в процесі навантаження задаються постійні значення напруг якоря і струму збудження. Для створення навантажувального режиму напруга збудження задається з деякою змінною складовою. Динамічна складова струму якоря, при цьому, утвориться як частка змінної складової напруги живлення двигуна і комплексного опору ланцюга якоря (Спосіб навантаження двигунів постійного струму і пристрій для його здійснення. AC CPCP, 1563410 G01R31/34). Відоме технічне рішення навантаження двигунів постійного струму без механічного сполучення валу двигуна з додатковою навантажувальною машиною[М. Кл.5 G01R31/34 №40067А 16.07.2001 Бюл. №6 Спосіб динамічного навантаження двигуна постійного струму незалежного збудження та пристрій для його здійснення]. Навантаження здійснюється шляхом формування залежності струму якоря та кутової швидкості якоря, визначають залежності для напруг на якорі та обмотці збудження, змінюють кут здвигу фаз між змінними складовими струму якоря та кутової швидкості з певним інтервалом, за отриманими даними роблять висновок про експлуатаційну придатність випробувальної електричної машини. Зазначений винахід приймається авторами як прототип у силу того, що він має з заявленим винаходом загальні операції й ознаки: - машину підключають до регульованого перетворювача напруги; - за допомогою зміни амплітуди і частоти періодичного впливу домагаються навантаження машини заданим ефективним струмом якоря. В основу винаходу поставлено задачу формування способу іспиту двигунів постійного струму незалежного збудження, шляхом формування постійних та періодичних впливів на ланцюги якоря і збудження. Поставлена задача вирішується наступним чином: - визначається залежність потоку машини, при якому реалізується зміна швидкості у часі, при заданому значенні струму якоря; - на силові перетворювачі в колі збудження та в колі якоря подаються сигнали пропорційні відповідним розрахунковим значенням напруг; - на підставі параметрів навантажувального режиму роблять висновки про працездатність випробовуваної машини. Від відомого способу навантаження пропонований спосіб відрізняється тим, що закони зміни струму якоря та швидкості визначаються в залежності від інтервалу діаграми навантаження. Докладно принцип функціонування системи можна пояснити наступними фігурами: Фіг.1. Діаграма навантаження. Фіг.2. Алгоритм навантаження. Фіг.3. Блок-схема пристрою навантаження. Фіг.4. Блок-схема обчислювального блоку пристрою навантаження. Алгоритм навантаження приведений на фіг.2. Відповідно до номінальних даних електричної машини та тахограми навантаження (фіг.1) задаються закони зміни швидкості та струму якоря, які можна записати універсальними залежностями k =m w( t ) = åw k =0 k cos kW t; k =m I( t ) = åI k cos( kW t - j k ). k =0 Залежність струму в часі представимо у вигляді J dw¢( t ) Mc Iя (t) = + × ; kФ dt kФ w¢( t ) = w т ( t ) + wн ( t ), де w т ( t ) - технологічна швидкість двигуна. wн ( t ) = Dwн sin W m t - складова швидкості, що викликана динамічним навантаженням; W m - кругова частота; Dw н - амплітудне значення динамічної складової швидкості. Для наведеної навантажувальної діаграми (фіг.1) вираз для ефективного значення струму має вид Ie = 2 I1 t 1 + I 2 t 2 + I 2 t 3 2 3 t1 + t 2 + t 3 + t n , де t n - час паузи. Значення струму на першій ділянці тахограми w J т + M0 t1 , I1 = kФ де М0 - момент холостого ходу двигуна. Таким чином необхідна величина коефіцієнта потоку двигуна w J т + M0 t1 kФ1 = . I1 На третій ділянці уповільнення значення коефіцієнта потоку w - J т + M0 t3 £ kФ н . kФ 3 = I3 На другій ділянці роботи з незмінною швидкістю струм якоря буде дорівнювати струму холостого ходу: M I0 = 0 . kФ Таким чином ефективний струм досліджуваного двигуна буде дорівнювати: Ie = 2 I1 t 1 + I 2 t 2 + I 2 t 3 0 3 t1 + t 2 + t 3 + tn < I ет , де Iет - значення еквівалентного струму, що відповідає технологічному процесу. Нерівність I e < I ет обумовлена тим, що на ділянці рівномірного руху струм якоря визначається тільки моментом холостого ходу. Якщо в цей період здійснювати додатково й динамічне навантаження, то вираз для I e набуде вигляду ¢ Ie = 2 2 2 I1 t 1 + I 2 t 2 + IH t 2 + I3 t 3 0 t1 + t 2 + t 3 + t n . Прийнявши I¢e = I ет визначимо струм динамічного навантаження IH = 2 I 2 ( t 1 + t 2 + t 3 + t n )(I1 t 1 + I2 t 2 + I 2 t 3 ) ет 0 3 . t2 Це значення може бути отримане шляхом дії на якірний ланцюг складним сигналом, який складається з постійної складової та змінної з частотою W m для t 1 + t 2 ³ t ³ t 1. Частота дії визначається параметрами двигуна Wm @ 1 = kФ . Lå × C Lå × J Визначимо напругу на кожній ділянці тахограми. Напруга на затискачах якоря dI( t ) U( t ) = L å + R å × I( t ) + kФ × w( t ). dt Напруга якоря на ділянках t 1, t 3 буде дорівнювати t1 2 kФ 1 UЯ1 ( t ) = I я R å + (I я - I 0 )t , J UЯ3 ( t ) = I яR å + kФ 2 3 J 0 t3 (I я - I 0 )t . t2 Напруга якоря на ділянці Із матиме вигляд U( t ) = U 0 + U H sin(W t + q), де U0 = I 0 R å + kФwm - постійна складова напруги живлення досліджуваного двигуна. UH = 2I H R 2 + ( W m L å å 1 2 ) W mC - зміна складова напруги живлення. де UH - амплітудне значення змінної складової напруги. При випробуванні електричної машини крім дотримання діаграм струму та швидкості необхідно також, щоб виконувалась умова і теплового режиму, тобто втрати енергії машини повинні знаходитись в гранично допустимих межах порівняно з відповідними втратами при технологічному процесі. Сумарні втрати енергії в технологічному режимі DW å T = DWMT + DWCT , Сумарні втрати в режимі випробування DW å B = DWMB + D WCB , де ( ) 2 DWМТ = I 2 × R Я + IВН × R В × Т Ц Э DWМВ = ( I2 Э 2 × R Я + IВ ) × RВ × ТЦ TЦ DWСТ( t )T = ò (a I 2 1 BH ) якоря в технологічному режимі, TЦ ò (a I сумарні втрати енергії в міді машини при випробуванні; + a 2 IBH × u( t ) T + a 3 u 2 ( t ) T dt 0 DWСТ( t )B = - сумарні втрати енергії в міді машини при технологічному процесі; 2 1 B (t)B - магнітні втрати пов'язані з процесом перемагнічування сталі ) + a 2 IB ( t ) B × u( t ) B + a 3 u 2 ( t )B dt 0 - магнітні втрати пов'язані з процесом перемагнічування сталі якоря при випробуванні, а1, а2, а3 - постійні коефіцієнти, u(t) - напруга на якорі двигуна, I B(t) - струм збудження, Тц - час циклу роботи. Кількість охолоджуючого повітря повинна регулюватися, виходячи з відношення D Wå B QB = QT × , D Wå T де QT - кількість охолоджуючого повітря в технологічному режимі. Продуктивність вентилятора пропорційна частоті живлення D Wå B fB = f T × . D Wå T Тоді швидкість обертання вентилятора розраховується по формулі 2 pf B wB = , p або D Wå B ö 2p æ ç fT × ÷, wB = D Wå T ÷ p ç è ø де р - число пар полюсів асинхронного двигуна.Пристрій, що реалізує спосіб представлений на фіг.3. Машина постійного струму 1 через датчик струму якоря 4 підключена до перетворювача 2, паралельно якому включений датчик напруги 3. Обмотка збудження електричної машини під'єднана через датчик струму збудження 5 до керованого збуджувача 6, напругу якого вимірює датчик 7. Швидкість обертання вентилятора 11 контролюється датчиком 14. Сигнали з датчиків струму якоря 4, напруги якоря 3, струму збудження 5, напруги збудження 7, швидкості обертання 8, продуктивності 14, температури 15 надходять на входи 1-7 обчислювального блоку (ОБ) 16, який через системи управління 12, 13 і 9 здійснює керування перетворювачами 2, 6, 10 відповідно, а також опрацьовує отримані сигнали й дані, введення яких виконується за допомогою блоку 17 та виводить результати на блок візуалізації 18. Блок-схема обчислювального блоку представлена на фіг.4. Сигнали напруги (Uя) та струму (І Я) якірної обмотки, напруги (U ) та струму (І ) обмотки збудження, швидкості обертання двигуна (w Я ), кількості В В охолоджуючого повітря (Q ф) та фактичної температури навколишнього середовища (Тпф) з відповідних датчиків надходять на блок вторинних датчиків 19, з виходу якого сигнали у вигляді напруг, еквівалентних вхідним величинам, за допомогою ключа, в якості якого використовується аналоговий мультиплексор 20, та плати аналого-цифрового перетворення 21 передаються до електронно-обчислювальної машини 22, де проводиться розрахунок сигналів, які в свою чергу через блок цифро-аналогового перетворення 24 та ключа 25, в якості якого використовується аналоговий демультиплексор, надходять на відповідні підсилюючі блоки 26, 27 та 28, з виходів яких вони у вигляді керуючих сигналів напруг задання якірної обмотки (Uяз(t)), обмотки збудження (Uвз(t)) та кількості охолоджуючого повітря (UQ3(t)) передаються до систем управління 12, 13 та 9 відповідно. Мікроконтролер 23 контролює узгодженість роботи блоків 20-25.
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for simulating load in testing a direct-current electric machine
Автори англійськоюRodkin Dmytro Yosypovych, Zachepa Yurii Volodymyrovych, Masterovyi Viktor Yakovych
Назва патенту російськоюСпособ моделирования нагрузки при испытаниях электрической машины постоянного тока
Автори російськоюРодькин Дмитрий Иосифович, Зачепа Юрий Владимирович, Мастеровый Виктор Яковлевич
МПК / Мітки
МПК: G01R 31/24
Мітки: струму, машин, постійного, навантаження, технологічного, спосіб, випробуванні, моделювання
Код посилання
<a href="https://ua.patents.su/6-70516-sposib-modelyuvannya-tekhnologichnogo-navantazhennya-pri-viprobuvanni-mashin-postijjnogo-strumu.html" target="_blank" rel="follow" title="База патентів України">Спосіб моделювання технологічного навантаження при випробуванні машин постійного струму</a>
Спосіб навантаження генераторів постійного струму незалежного збудження і пристрій для реалізації способу
Номер патенту: 49281
Опубліковано: 16.09.2002
Автори: Кривонос Сергій Анатолійович, Бялобржеський Олексій Володимирович, Величко Тетяна Володимирівна, Чорний Олексій Петрович, Родькін Дмитро Йосипович
МПК: G01R 31/24
Мітки: генераторів, постійного, пристрій, реалізації, збудження, струму, навантаження, спосіб, незалежного, способу
Формула / Реферат:
1. Спосіб навантаження генератора постійного струму незалежного збудження, який полягає в тому, що якір електричної машини підключають до керованого силового перетворювача через датчик струму якоря і датчик напруги, обмотку збудження підключають до збудника через датчик струму збудження і напруги збудження, контролюють параметри режиму навантаження, струм якоря, струм збудження, напругу якоря, напругу збудження, швидкість обертання, який...
Спосіб визначення меж зони безіскрової роботи колекторних електричних машин постійного струму
Номер патенту: 33503
Опубліковано: 15.02.2001
Автори: Іванов Олексій Борисович, Бешта Олександр Степанович, Колб Андрій Антонович
МПК: H02K 13/14
Мітки: електричних, постійного, визначення, зони, роботи, меж, струму, колекторних, машин, спосіб, безіскрової
Текст:
...меж зони безіскрової роботи, відповідно до винаходу, попередньо задають перехідний режим, що відповідає необхідному значенню струму якоря, а потім при цьому значенні струму якоря роблять багаторазово розгін і гальмування випробовуваної машини в режимі трьохперіодної діаграми швидкості й одночасно, змінюючи величину струму підживлення-відживлення, реєструють при кожному значенні струму якоря всі параметри, необхідні для побудови меж зони...
Спосіб динамічного навантаження двигуна постійного струму незалежного збудження та пристрій для його здійснення
Номер патенту: 40067
Опубліковано: 16.07.2001
Автори: Родькін Дмитро Йосипович, Величко Тетяна Володимирівна, Луговий Анатолій Васильович, Вошун Олексій Миколайович, Бялобржевський Олексій Володимирович, Добрецов Володимир Валентинович, Пасмурских Олександр Олексійович
МПК: G01R 31/34
Мітки: динамічного, пристрій, навантаження, двигуна, збудження, незалежного, постійного, спосіб, здійснення, струму
Формула / Реферат:
1. Спосіб динамічного навантаження двигуна постійного струму незалежного збудження, який полягає в тому, що якір двигуна живиться від регульованого джерела через датчик струму якоря, обмотка збудження живиться від регульованого джерела через датчик струму збудження, контролюються параметри режиму навантаження, струм якоря, напруга якоря, швидкість обертання якоря, який відрізняється тим, що задають залежності струму якоря та кутової швидкості...
Пристрій для поліпшення комутації колекторних електричних машин постійного струму
Номер патенту: 33504
Опубліковано: 15.02.2001
Автори: Поляков Микола Георгійович, Іванов Олексій Борисович, Колб Андрій Антонович
МПК: H02K 13/14
Мітки: поліпшення, електричних, колекторних, постійного, комутації, пристрій, струму, машин
Текст:
...і комутуючого потоку, виконаний на базі введених масштабного підсилювача і моделі комутуючого потоку, враховуючої розмагнічувальну дію вихрових струмів, вхід якої залучений до виходу датчика струму якоря, а вихід з'єднаний із першим входом масштабного підсилювача, другий вхід якого залучений до виходу датчика струму якоря, вихід масштабного підсилювача, пропорційний зазначеному сигналу керування, залучений до третього входу підсилювача, що...
Пристрій для перевірки міжвиткових замикань в полюсних котушках електричних машин постійного струму
Номер патенту: 30157
Опубліковано: 15.11.2000
Автор: Ганчук Степан Дмитрович
МПК: G01R 31/02
Мітки: замикань, електричних, струму, машин, пристрій, міжвиткових, постійного, котушках, полюсних, перевірки
Формула / Реферат:
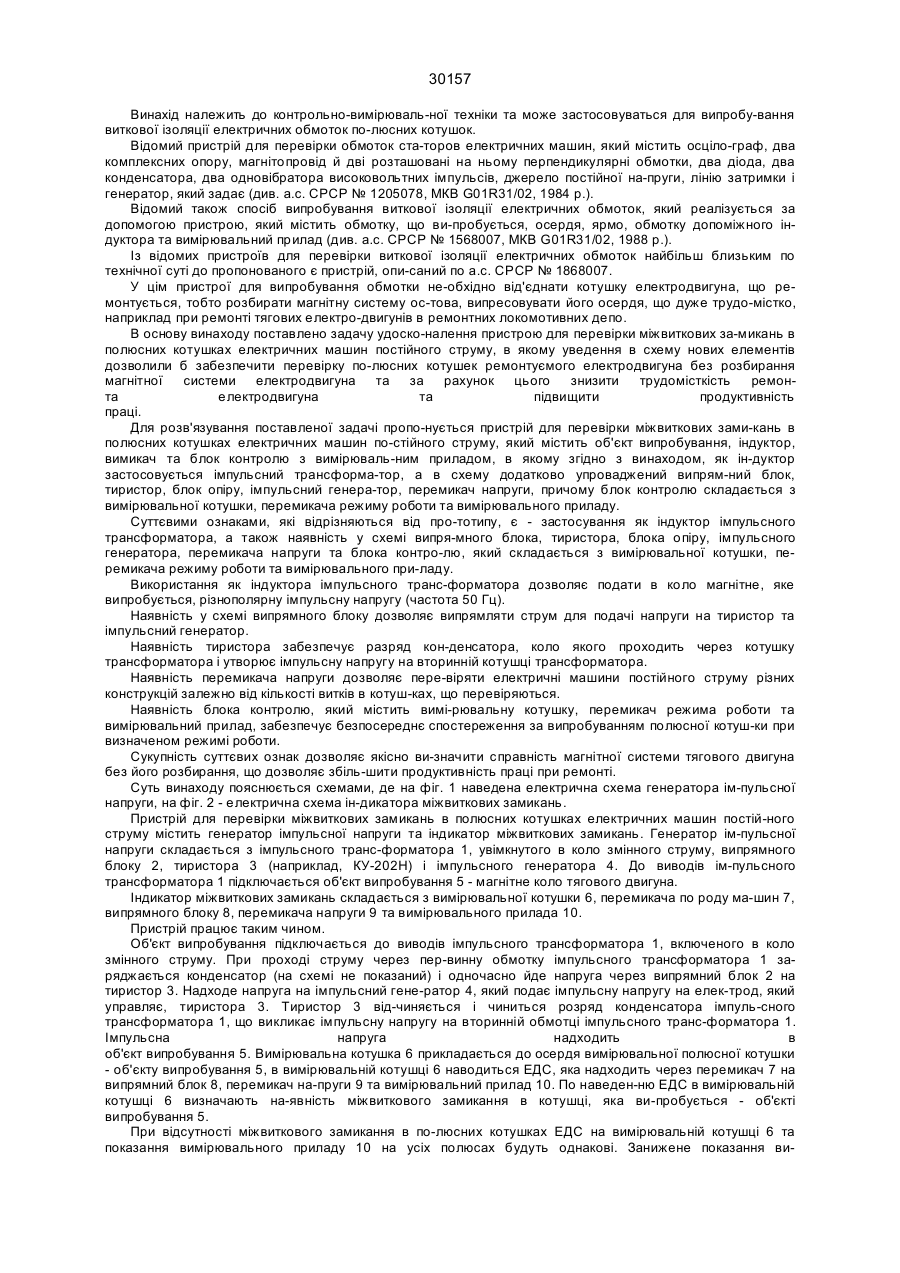
Пристрій для перевірки міжвиткових замикань в полюсних котушках електричних машин постійного струму, який містить об'єкт випробування, індуктор, вимикач і блок контролю з вимірювальним приладом, який відрізняється тим, що як індуктор використовується імпульсний трансформатор, і додатково містить випрямний блок, тиристор, блок опору, імпульсний генератор, перемикач напруги, а блок контролю складається з вимірювальної котушки, перемикача режима...
Попередній патент: Ізоляційний матеріал
Наступний патент: Спосіб навантаження асинхронного двигуна при випробуваннях та пристрій для його здійснення
Випадковий патент: Рознімне з'єднання