Панорамний спосіб сканування в оптично-електронних системах кругового огляду
Номер патенту: 71107
Опубліковано: 10.07.2012
Автори: Микитенко Володимир Іванович, Подрига Сергій Ігорович
Формула / Реферат
1. Панорамний спосіб сканування в оптично електронних системах кругового огляду, що включає сканування та спостереження за навколишнім простором при обертанні скануючої оптичної системи по азимуту на 360° навколо своєї вертикальної осі, який відрізняється тим, що після сканування однієї смуги огляду змінюють напрям спостереження відносно горизонтальної осі, тобто змінюють напрям сканування по куту місця дискретно, після кожного оберту скануючої оптичної системи, і переходить до сканування наступної смуги; потім всі проскановані ділянки об'єднують разом в єдине зображення, в повному зображенні виділяють необхідні об'єкти спостереження і впродовж наступного сканування, при наближенні осі спостереження оптичної системи до кожного з цих об'єктів, кутову швидкість сканування зменшують, а роздільну здатність збільшують.
2. Панорамний спосіб сканування в оптично електронних системах кругового огляду за п. 1, який відрізняється тим, що напрям спостереження по куту місця змінюють поступово впродовж обертання.
Текст
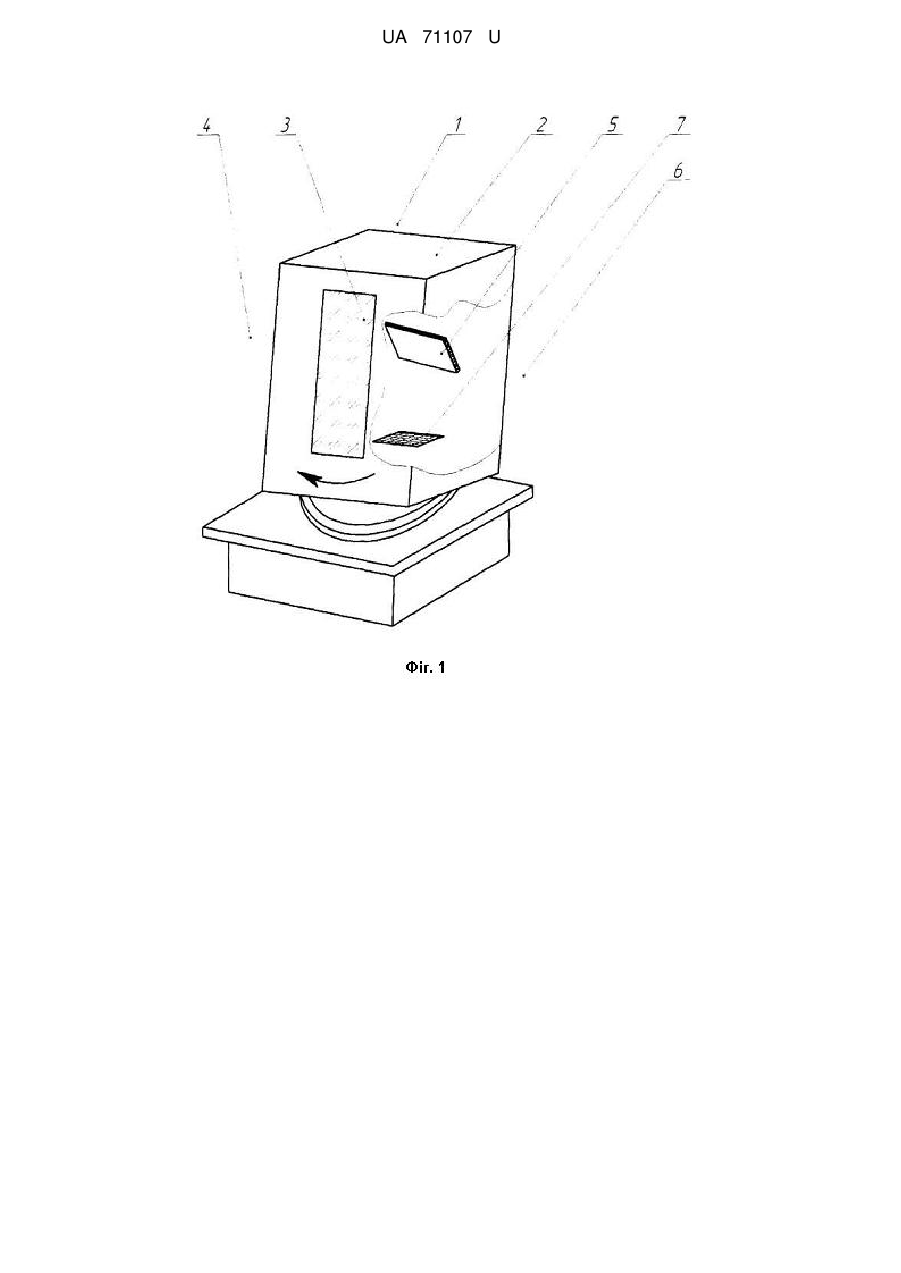
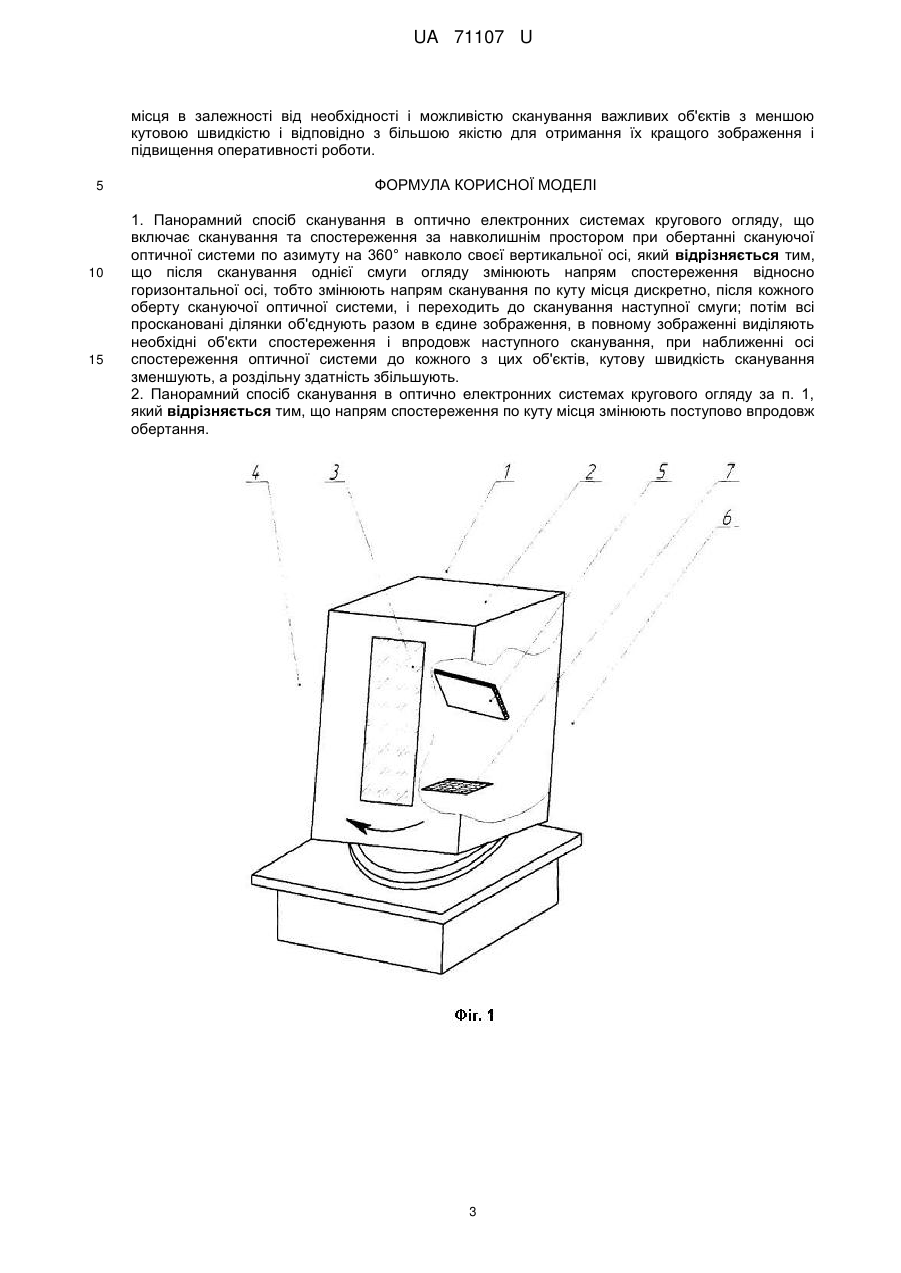
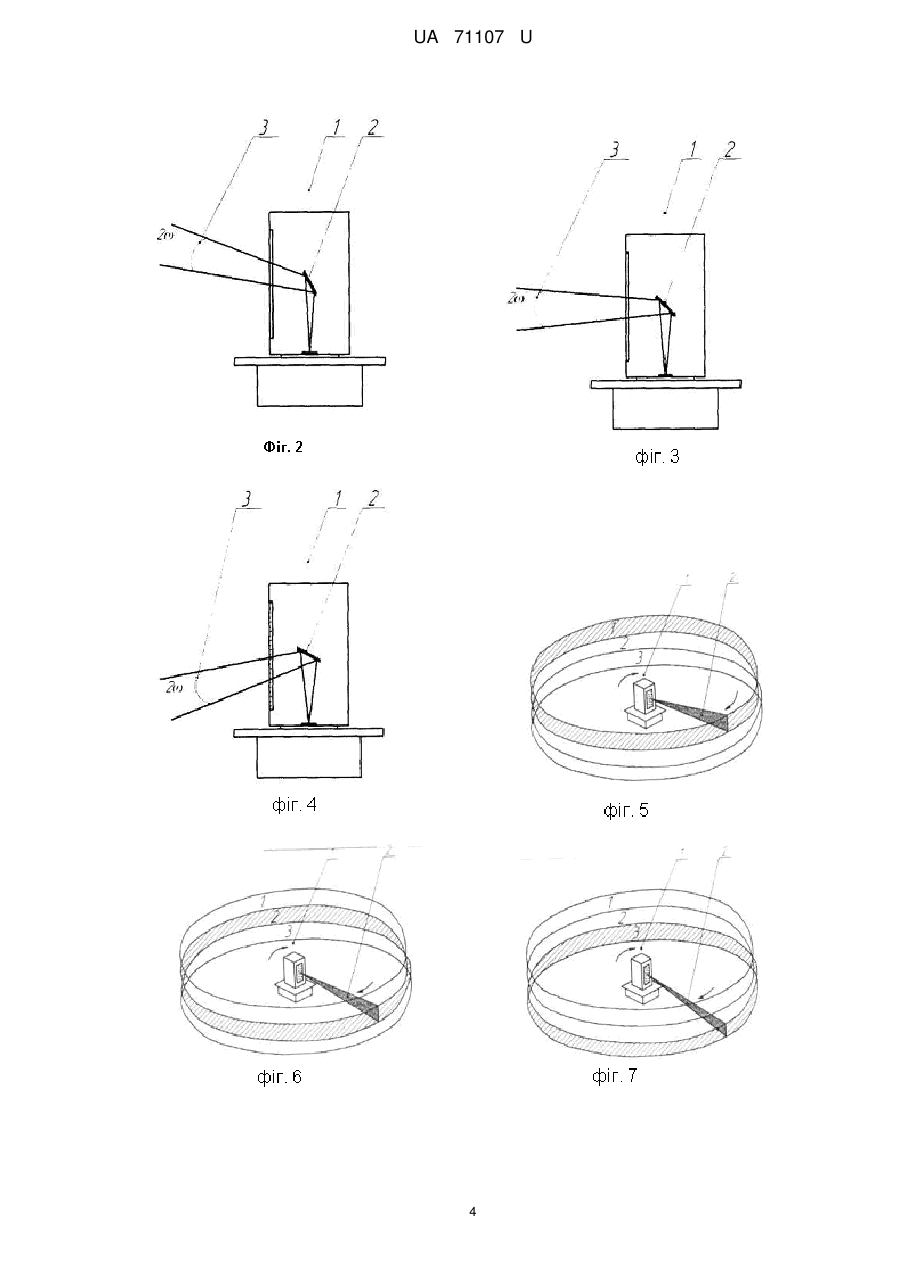
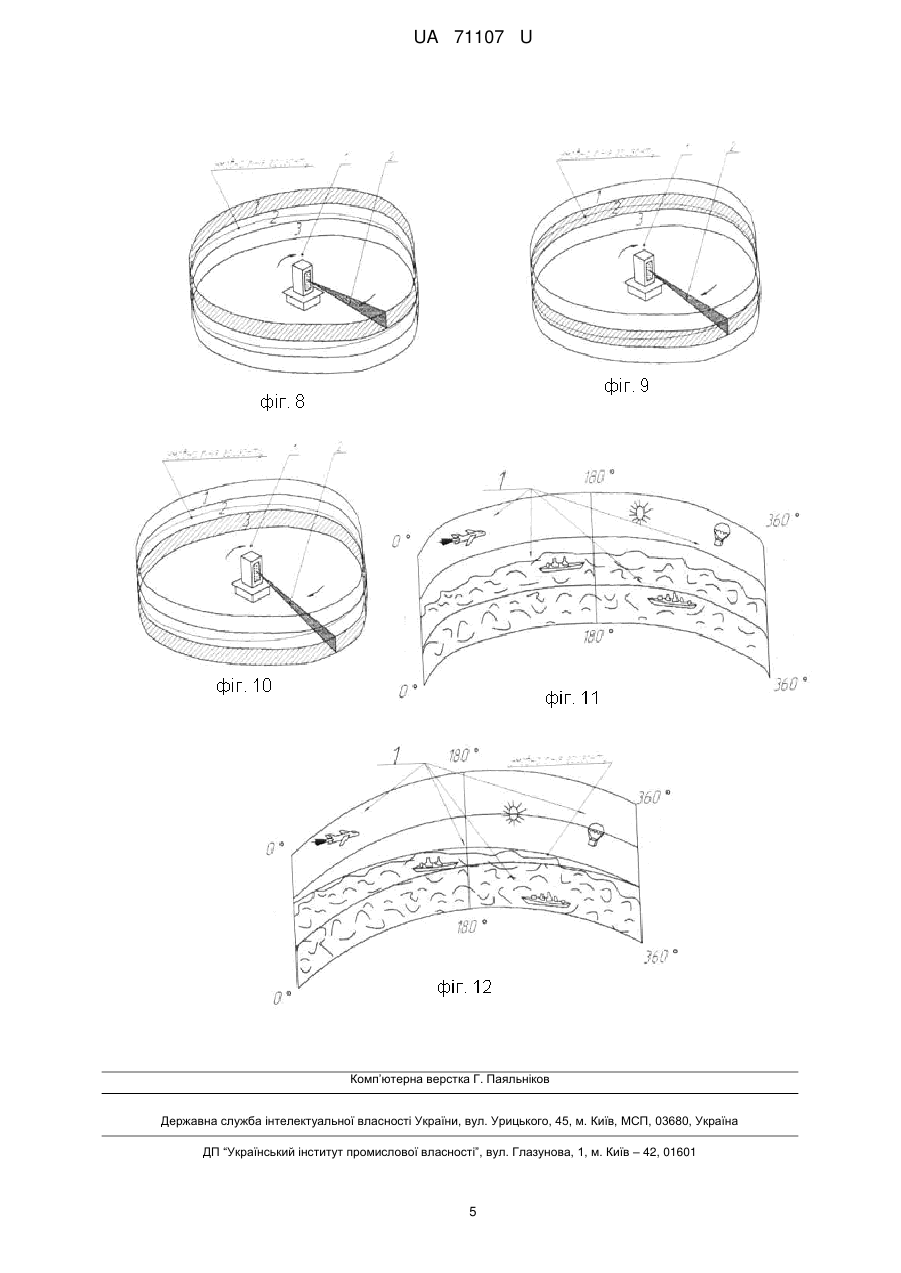
Реферат: Панорамний спосіб сканування в оптично електронних системах кругового огляду включає сканування та спостереження за навколишнім простором при обертанні скануючої оптичної системи по азимуту на 360° навколо своєї вертикальної осі. Після сканування однієї смуги огляду змінюють напрям спостереження відносно горизонтальної осі, тобто змінюють напрям сканування по куту місця дискретно, після кожного оберту скануючої оптичної системи, і переходить до сканування наступної смуги; потім всі проскановані ділянки об'єднують разом в єдине зображення, в повному зображенні виділяють необхідні об'єкти спостереження і впродовж наступного сканування, при наближенні осі спостереження оптичної системи до кожного з цих об'єктів, кутову швидкість сканування зменшують, а роздільну здатність збільшують. UA 71107 U (54) ПАНОРАМНИЙ СПОСІБ СКАНУВАННЯ В ОПТИЧНО-ЕЛЕКТРОННИХ СИСТЕМАХ КРУГОВОГО ОГЛЯДУ UA 71107 U UA 71107 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області оптично-електронних скануючих приладів і приладів для спостереження, що забезпечують сканування та спостереження за навколишнім простором на 360° по азимуту при обертанні оптичної скануючої системи навколо своєї вертикальної осі зі зміною у широкому діапазоні напряму сканування по куту місця з виділенням найважливіших об'єктів спостереження і при наступному скануванні збільшенням якості їх зображення за рахунок зменшення кутової швидкості сканування цих об'єктів. Як найближчий аналог прийнято патент USA "360° viewing system" (№ 3976837 від 24 серпня 1976 року). В даному патенті описана оглядова система для панорамного сканування навколишнього зображення, в якій скануюча оптична система обертається на 360° відносно вертикальної осі і таким чином утворюється панорамне зображення простору навколо приладу. Потім інформація виводиться на екран, монітор і т.п. При скануванні навколишнього зображення використовується одне або декілька дзеркал для передачі навколишнього зображення, отриманого при поступовому обертанні оптичної скануючої системи навколо вертикальної осі, на приймач випромінювання. Недоліками найближчого аналога є неможливість зміни та регулювання напрямку спостереження по куту місця при обертанні системи. Тобто весь час відбувається сканування тільки однієї смуги навколишнього простору. В основу корисної моделі поставлена задача регулювання напрямку спостереження системи і збільшення поля зору по куту місця системи, а також забезпечення високої якості зображення найбільш важливих об'єктів спостереження. Поставлена задача вирішується тим, що в режимі виявлення, при обертанні системи навколо вертикальної осі по азимуту на 360°, оптичний скануючий елемент (дзеркало, призма або інший оптичний елемент), що забезпечує сканування по азимуту, змінює кут нахилу відносно горизонтальної осі і таким чином змінює напрям панорамного сканування всієї оптичної системи для забезпечення огляду різних ділянок простору по куту місця. Змінювати своє положення з кожним новим обертом оптичний скануючий елемент може дискретно або поступово. При цьому сканування ділянки панорамного зображення відбувається відповідно кільцями або витком серпантину. Потім об'єднуємо всі проскановані смуги разом і отримуємо повне зображення навколишньої панорами. Після цього в режимі розпізнавання відбувається виділення об'єктів спостереження, які мають найбільше значення. І при наступному скануванні при наближенні оптичної осі до кожного з важливих об'єктів, кутова швидкість сканування зменшується для забезпечення високої якості зображення цих об'єктів. При проходженні цих об'єктів, кутова швидкість сканування збільшується, до моменту наближення до іншого об'єкта. Можливий режим сканування тільки важливих об'єктів спостереження зі зменшенням кутової швидкості сканування для забезпечення високої якості їх зображення. В даному режимі скорочується час сканування, адже відбувається сканування тільки декількох відносно невеликих ділянок спостереження. Можливий режим сканування при нормальній кутовій швидкості тільки тих смуг, де знаходяться важливі об'єкти зі зменшенням кутової швидкості сканування при наближенні оптичної вісі до важливих об'єктів. В даному режимі також скорочується час сканування, але трохи менше від попереднього, адже відбувається сканування крім важливих об'єктів ще й сканування ділянки простору між ними. Можливий режим сканування при нормальній кутовій швидкості всіх смуг навколишнього зображення з важливими об'єктами зі зменшенням кутової швидкості сканування важливих об'єктів. В даному режимі необхідно більше часу для сканування, ніж в попередніх, але при цьому можна повністю бачити зображення всіх об'єктів і відповідні їм фони. Також можливе поєднання декількох режимів між собою у різній послідовності. Зображення всієї панорами може передаватися на одну частину монітора, екрана і т.д., а зображення важливих об'єктів, в нормальному або збільшеному розмірі, на іншу частину монітора або на окремий монітор. Спосіб пояснюється кресленням, де на фіг. 1 зображено тривимірний вигляд системи, що сканує по азимуту і куту місця, позиція 4 – корпус, всередині якого розміщена оптична скануюча частина, що обертається навколо вертикальної осі 1, позиція 3 - це захисне скло, позиція 2 - це оптична вісь, позиція 5 - оптичний скануючий елемент, що відхиляється відносно горизонтальної осі 6, позиція 7 - це фоточутливий елемент (матричний або лінійний приймач випромінювання). На фіг.2, фіг. 3, фіг. 4 зображено боковий вигляд оптичної скануючої системи і показано як змінюється напрям спостереження поля зору позиція 2, системи в залежності від положення оптичного скануючого елемента позиція 5, при обертанні всієї системи навколо вертикальної осі, позиція 1. На фіг. 2, а, б, в показано як змінюється напрям спостереження поля зору 3 системи в залежності від положення оптичного скануючого елемента 2 при обертанні всієї системи навколо вертикальної осі 1. На фіг. 5, фіг. 6, фіг. 7 фіг.8, фіг.9, фіг.10 1 UA 71107 U 5 10 15 20 25 30 35 40 45 50 55 60 зображено порядок утворення кадру з трьох послідовно просканованих кільцевих смуг згори вниз, при дискретній (фіг. 5, фіг. 6, фіг. 7) і поступовій (фіг. 8, фіг. 9, фіг. 10) зміні положення оптичного скануючого елемента відносно горизонтальної осі. Позиція 1 - вертикальна вісь системи, навколо якої обертається скануюча частина системи. Позиція 2 - кутове поле зору системи. На фіг. 11 показано кадр навколишньої панорами від 0° до 180° і до 360°, утворений після послідовного сканування трьох кільцевих смуг при дискретній зміні положення скануючого дзеркала. На фіг. 12 показано кадр навколишньої панорами від 0° до 180° і до 360°, утворений після послідовного сканування трьох кільцевих смуг при поступовій зміні положення скануючого дзеркала. На цих обох фігурах позиція 1 - виділення важливого об'єкта спостереження. Спосіб панорамного сканування реалізується наступним чином: в режимі виявлення корпус зі скануючою частиною системи, фіг. 1 позиція 4, здійснює обертання навколо своєї вертикальної осі, фіг. 1 позиція 1, вона здійснює сканування різних кільцевих смуг простору спостереження, фіг 5-фіг. 10, вузьким полем зору, фіг. 5- фіг. 10 позиція 2. Спочатку випромінювання від зображення навколишнього середовища надходить через захисне скло, фіг. 1 позиція 3, на оптичний скануючий елемент, фіг. 1 позиція 5, що змінює напрям оптичної осі фіг. 1 позиція 2 і після цього випромінювання попадає на приймач випромінювання, фіг. 1 позиція 7. Коли система здійснила оберт навколо своєї вертикальної осі фіг. 1 позиція 1, положення оптичного скануючого елемента фіг. 1 позиція 5, що змінює напрям спостереження оптичної осі вгору або вниз, фіг. 1 позиція 2, змінюється дискретно або поступово і здійснюється сканування нового кільця або витка серпантину відповідно, фіг. 5- фіг.10. Якщо положення оптичного скануючого елемента змінюється дискретно після оберту оптичної скануючої системи, то форми смуг сканування - кільця і, якщо їх розвернути, то отримаємо розгортку панорамного зображення, фіг. 11. На фіг. 11 показано панорамну картину, що складається з трьох сполучених кільцевих зображень, виконаних при трьох послідовних обертах системи під різними кутами спостереження. А якщо оптичний скануючий елемент змінюється поступово своє положення впродовж обертання оптичної скануючої системи, то смуги сканування будуть серпантиноподібної форми, що нахилені до лінії горизонту і, якщо їх розвернути, то отримаємо розгортку панорамного зображення, фіг. 12. Потім відбувається накладання всіх просканованих кільцевих секторів разом, наприклад, від верхнього до нижнього, де було зафіксовано потоки випромінювання від реальних об'єктів з фоном, і накладання їх між собою для отримання повної картини спостереження, показаної на фіг. 11 і 12. Таким чином ми отримаємо зображення навколишньої панорами (від 0° до 360° по азимуту) в широкому полі зору по куту місця. Після цього в режимі розпізнавання відбувається виділення важливих об'єктів спостереження з всього панорамного зображення, фіг. 11 позиція 1, фіг. 12. В даному випадку такими об'єктами є: літак, парашут і два кораблі, сонце до них не належить. Після отримання панорами навколишнього зображення і виділення важливих об'єктів спостереження, відбувається сканування всього простору з нормальною кутовою швидкістю, а при наближенні до кожного з важливих об'єктів спостереження, кутова швидкість сканування такої ділянки зменшуються, а після її проходження збільшується до нормального значення, до моменту наближення оптичної осі сканування до наступного важливого об'єкта спостереження. Сканування може реалізовуватись різними режимами. Можливий режим сканування тільки важливих об'єктів спостереження зі зменшенням кутової швидкості сканування для забезпечення високої якості їх зображення. В даному режимі скорочується час сканування, адже відбувається сканування тільки декількох відносно невеликих ділянок спостереження. Можливий режим сканування при нормальній кутовій швидкості тільки тих смуг, де знаходяться важливі об'єкти зі зменшенням кутової швидкості сканування при наближенні оптичної осі до важливих об'єктів. В даному режимі також скорочується час сканування, але трохи менше від попереднього, адже відбувається сканування крім важливих об'єктів ще й сканування ділянки простору між ними. Можливий режим сканування при нормальній кутовій швидкості всіх смуг навколишнього зображення з важливими об'єктами зі зменшенням кутової швидкості сканування важливих об'єктів. В даному режимі необхідно більше часу для сканування, ніж в попередніх, але при цьому можна повністю бачити зображення всіх об'єктів і відповідні їм фони. Також можливе поєднання декількох режимів між собою у різній послідовності. Режими вибираються в залежності від необхідності оперативності роботи системи і необхідності огляду поля зору навколишньої панорами. Зображення всієї панорами може передаватися на одну частину монітора, екрана і т.д., а зображення важливих об'єктів, в нормальному або збільшеному розмірі, на іншу частину монітора або на окремий монітор. Технічний результат полягає у збільшенні кута огляду скануючої оптичної системи по куту місця при панорамному скануванні з можливістю регулювання ширини смуги огляду по куту 2 UA 71107 U місця в залежності від необхідності і можливістю сканування важливих об'єктів з меншою кутовою швидкістю і відповідно з більшою якістю для отримання їх кращого зображення і підвищення оперативності роботи. 5 10 15 ФОРМУЛА КОРИСНОЇ МОДЕЛІ 1. Панорамний спосіб сканування в оптично електронних системах кругового огляду, що включає сканування та спостереження за навколишнім простором при обертанні скануючої оптичної системи по азимуту на 360° навколо своєї вертикальної осі, який відрізняється тим, що після сканування однієї смуги огляду змінюють напрям спостереження відносно горизонтальної осі, тобто змінюють напрям сканування по куту місця дискретно, після кожного оберту скануючої оптичної системи, і переходить до сканування наступної смуги; потім всі проскановані ділянки об'єднують разом в єдине зображення, в повному зображенні виділяють необхідні об'єкти спостереження і впродовж наступного сканування, при наближенні осі спостереження оптичної системи до кожного з цих об'єктів, кутову швидкість сканування зменшують, а роздільну здатність збільшують. 2. Панорамний спосіб сканування в оптично електронних системах кругового огляду за п. 1, який відрізняється тим, що напрям спостереження по куту місця змінюють поступово впродовж обертання. 3 UA 71107 U 4 UA 71107 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюPanoramic scanning method in optical-electronic all-around looking systems
Автори англійськоюPodryha Serhii Ihorovych, Mykytenko Volodymyr Ivanovych
Назва патенту російськоюПанорамный способ сканирования в оптически-электронных системах кругового обзора
Автори російськоюПодрига Сергей Игоревич, Микитенко Владимир Иванович
МПК / Мітки
МПК: H04N 9/10
Мітки: оптично-електронних, системах, панорамний, кругового, спосіб, сканування, огляду
Код посилання
<a href="https://ua.patents.su/7-71107-panoramnijj-sposib-skanuvannya-v-optichno-elektronnikh-sistemakh-krugovogo-oglyadu.html" target="_blank" rel="follow" title="База патентів України">Панорамний спосіб сканування в оптично-електронних системах кругового огляду</a>
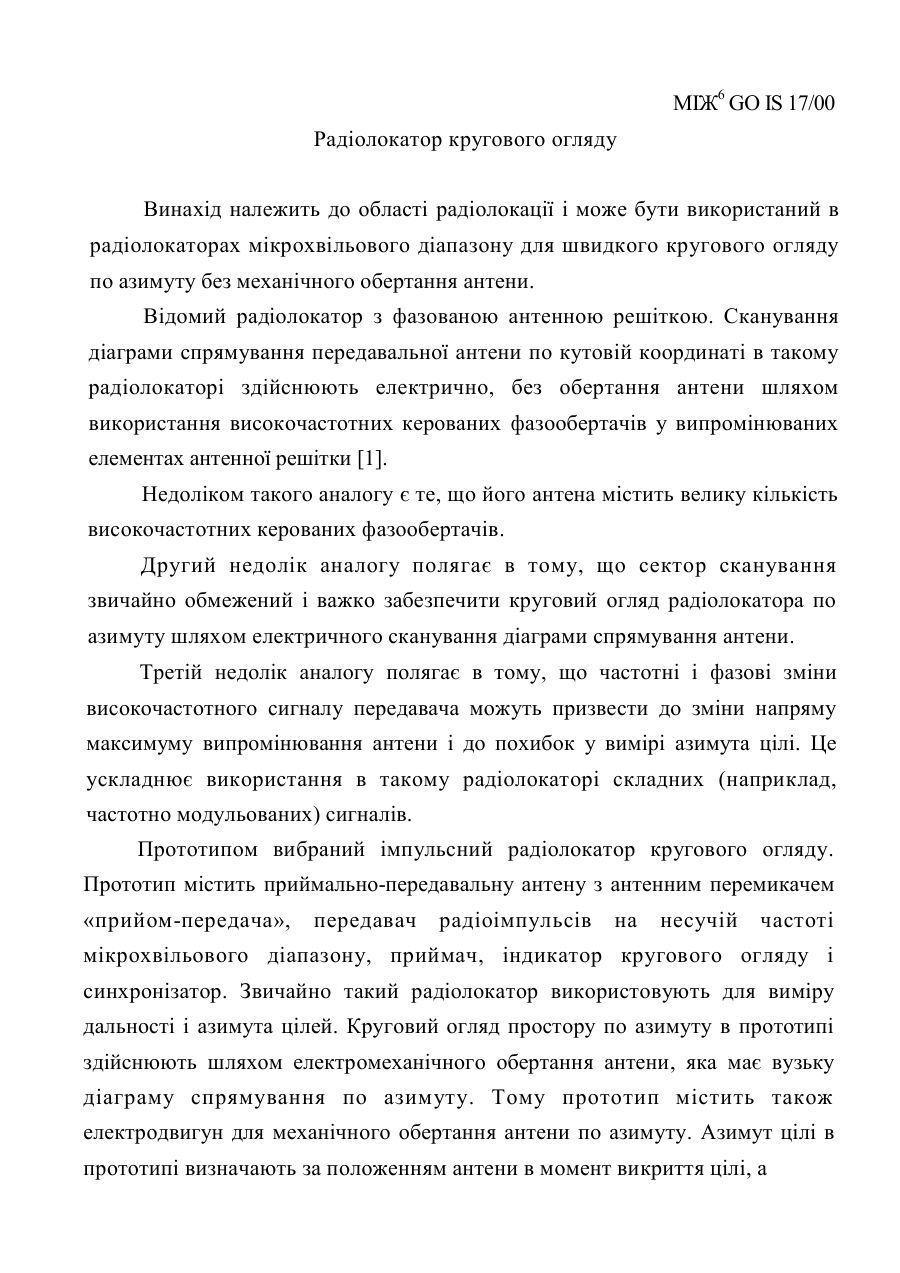
Радіолокатор кругового огляду
Номер патенту: 32196
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Бахвалов Валентин Борисович, Пророшин Сергій Михайлович
МПК: G01S 17/00
Мітки: огляду, кругового, радіолокатор
Текст:
...діаграма спрямування передавальної антени в горизонтальній площині. До складу запропонованого пристрою на фіг. 1 входять такі основні елементи: перший приймальний вібратор 1, що приймає луна-сигнали цілей з передньої напівсфери; другий приймальний вібратор 2, який приймає луна-сигнали цілей з задньої напівсфери; плоский металевий рефлектор 3 приймальної антени; перший 4 і другий 5 приймачі, пов'язані відповідно з першим і другим вібраторами...
Двосигнальний пеленгатор на індикаторі кругового огляду
Номер патенту: 35826
Опубліковано: 16.04.2001
Автори: КУБРАК ОЛЕКСАНДР МИКОЛАЙОВИЧ, Вагапов Арслан Мінгазович, Приймачук Олег Віталійович
МПК: G01S 3/00
Мітки: двосигнальний, кругового, огляду, індикаторі, пеленгатор
Формула / Реферат:
Двосигнальний пеленгатор на індикаторі кругового огляду, який містить антенну решітку (АР), кожен n-ий вихід елементів якої (n=l,2,...,N, N=2і, і=1,2, і т.д.) з'єднаний з відповідними входами перетворювача Адамара (ПА), який містить HxZ елементів сумарно-різницевої обробки (ЕС-РО) (H=N/2, Z=log2N) та має N входів і N виходів, кожен n-ний вихід якого з'єднаний з послідовно ввімкненими лінійним трактом аналогових приймальних модулів (ЛТАПМ) та...
Рухома наземна двокоординатна радіолокаційна станція кругового огляду метрового діапазону хвиль

Номер патенту: 10906
Опубліковано: 15.12.2005
Автори: Колдоркіна Наталья Романовна, Коган Сємьон Міхайловіч, Бомштейн Алєксандр Давідовіч, Харітонов Сєргєй Алєксандровіч, Москалєнко Сєргєй Валєрьєвіч
МПК: G01S 7/00, G01S 13/00
Мітки: метрового, наземна, рухома, радіолокаційна, огляду, хвиль, станція, двокоординатна, діапазону, кругового
Формула / Реферат:
1. Рухома наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону хвиль, що містить послідовно з'єднані формувач зондувальних сигналів, передавальний пристрій, основну антену з датчиком азимуту та приймальний пристрій основного каналу, а також послідовно з'єднані пристрій первинної обробки (ППО), пристрій відображення, керування і контролю (ПКК) і пристрій сполучення, яка відрізняється тим, що до неї введені...
Спосіб вимірювання пропускання, кругового дихроїзму, оптичного обертання оптично активних речовин та дихрограф для його здійснення
Номер патенту: 35606
Опубліковано: 16.04.2001
Автор: Рокос Іржи
МПК: G01N 21/19
Мітки: кругового, оптично, оптичного, речовин, дихроїзму, активних, пропускання, здійснення, вимірювання, спосіб, обертання, дихрограф
Формула / Реферат:
1. Способ измерения пропускания, кругового дихроизма и оптического вращения оптически активных веществ, заключающийся в том, что при выбранной длине волны осуществляют предварительную калибровку измерительной системы, образующей измерительный луч, путём гармонического анализа состояния поляризации измерительного луча и определяют градуировочные значения, устанавливают с помощью анализа гармоник состояния поляризации измерительного...
Спосіб керування об’єктами в дорожніх інформаційних системах з використанням супутникових електронних карт
Номер патенту: 47692
Опубліковано: 25.02.2010
Автор: Щуренко Юрій Олександрович
МПК: G08G 1/01
Мітки: системах, карт, об'єктами, керування, електронних, інформаційних, спосіб, використанням, супутникових, дорожніх
Формула / Реферат:
Спосіб керування об'єктами в дорожніх інформаційних системах з використанням супутникових електронних карт, який включає накопичення інформації про стан об'єктів в базі даних, розрахунок програмної бази даних параметрів оптимальних режимів роботи об'єктів на подальший час і передачу об'єктам цих параметрів для виконання при використанні унікальних для кожного об'єкта піктограм, розміщених на електронних схемах автоматизованих робочих місць,...
Попередній патент: Ящик фанерний
Наступний патент: Ультразвуковий фазово-імпульсний витратомір
Випадковий патент: Спосіб прогнозування динаміки вогнищевих змін при лікуванні хворих на туберкульоз легень