Двосигнальний пеленгатор на індикаторі кругового огляду
Номер патенту: 35826
Опубліковано: 16.04.2001
Автори: Приймачук Олег Віталійович, Вагапов Арслан Мінгазович, КУБРАК ОЛЕКСАНДР МИКОЛАЙОВИЧ


Формула / Реферат
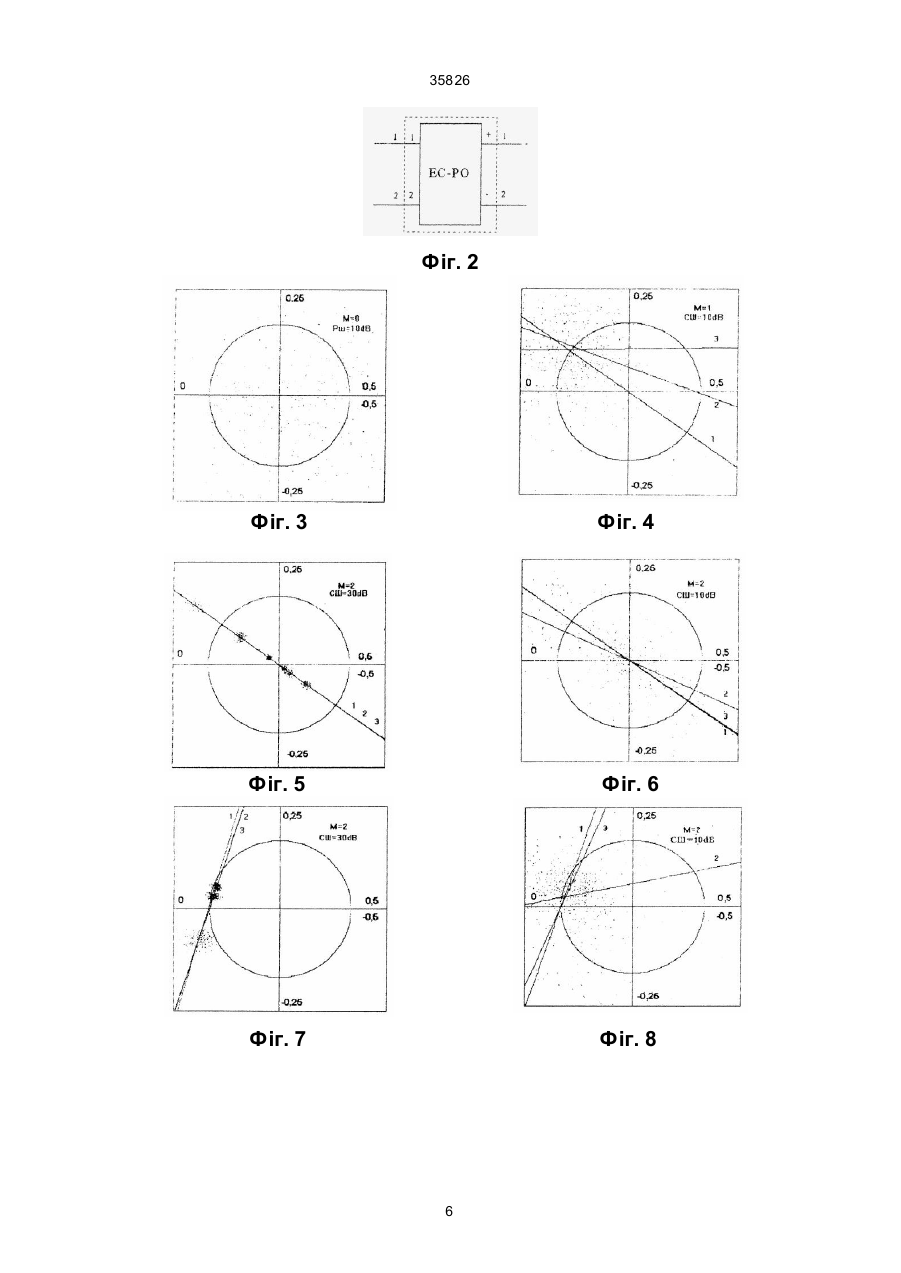
Двосигнальний пеленгатор на індикаторі кругового огляду, який містить антенну решітку (АР), кожен n-ий вихід елементів якої (n=l,2,...,N, N=2і, і=1,2, і т.д.) з'єднаний з відповідними входами перетворювача Адамара (ПА), який містить HxZ елементів сумарно-різницевої обробки (ЕС-РО) (H=N/2, Z=log2N) та має N входів і N виходів, кожен n-ний вихід якого з'єднаний з послідовно ввімкненими лінійним трактом аналогових приймальних модулів (ЛТАПМ) та аналого-цифровим перетворювачем (АЦП), вихід кожного n-го АЦП з'єднаний із входами розвязувального пристрою (РП), який здійснює оцінку кутової координати m-го джерела випромінювання сигналів шумового походження (ДВСШП), який відрізняється тим, що в ньому нова форма виконання елемента-АР має три елементи (N=3), ПА містить один ЕС-РО і має два входи та два виходи, новим елементом є фазообертач на 90 градусів (ФО-90), замість АЦП та РП використано нові елементи, схему ділення напруг (СДН) та індикатор кругового огляду (ІКО), вихід другого елемента АР з'єднаний із входом третього ЛТАПМ (ЛТАПМ 3.3), вихід третього елемента АР з'єднаний із другим входом ПА, вихід другого ЛТАПМ (ЛТАПМ 3.2) з'єднаний із входом ФП-90, вихід першого ЛТАПМ (ЛТАПМ 3.1) з'єднаний із першим входом першої СДН (СДН 5.1), вихід ФП-90 з'єднаний із першим входом другої СДН (СДН 5.2), вихід третього ЛТАПМ (ЛТАПМ 3.3) з'єднаний із другим входом першої та другої СДН (СДН 5.1, СДН 5.2), виходи першої та другої СДН (СДН 5.1, СДН 5.2) з'єднані з першим та другим входами ПСО.
Текст
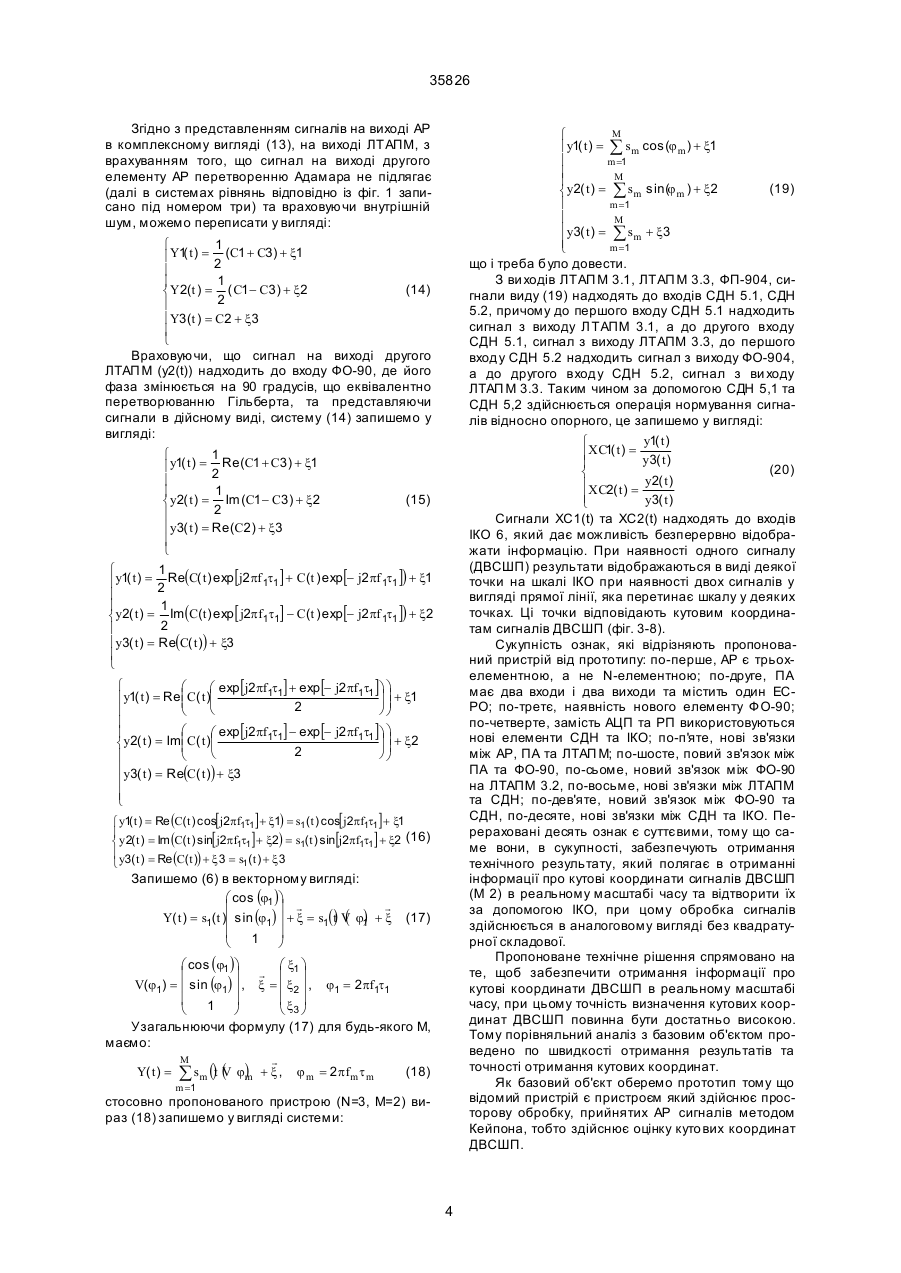
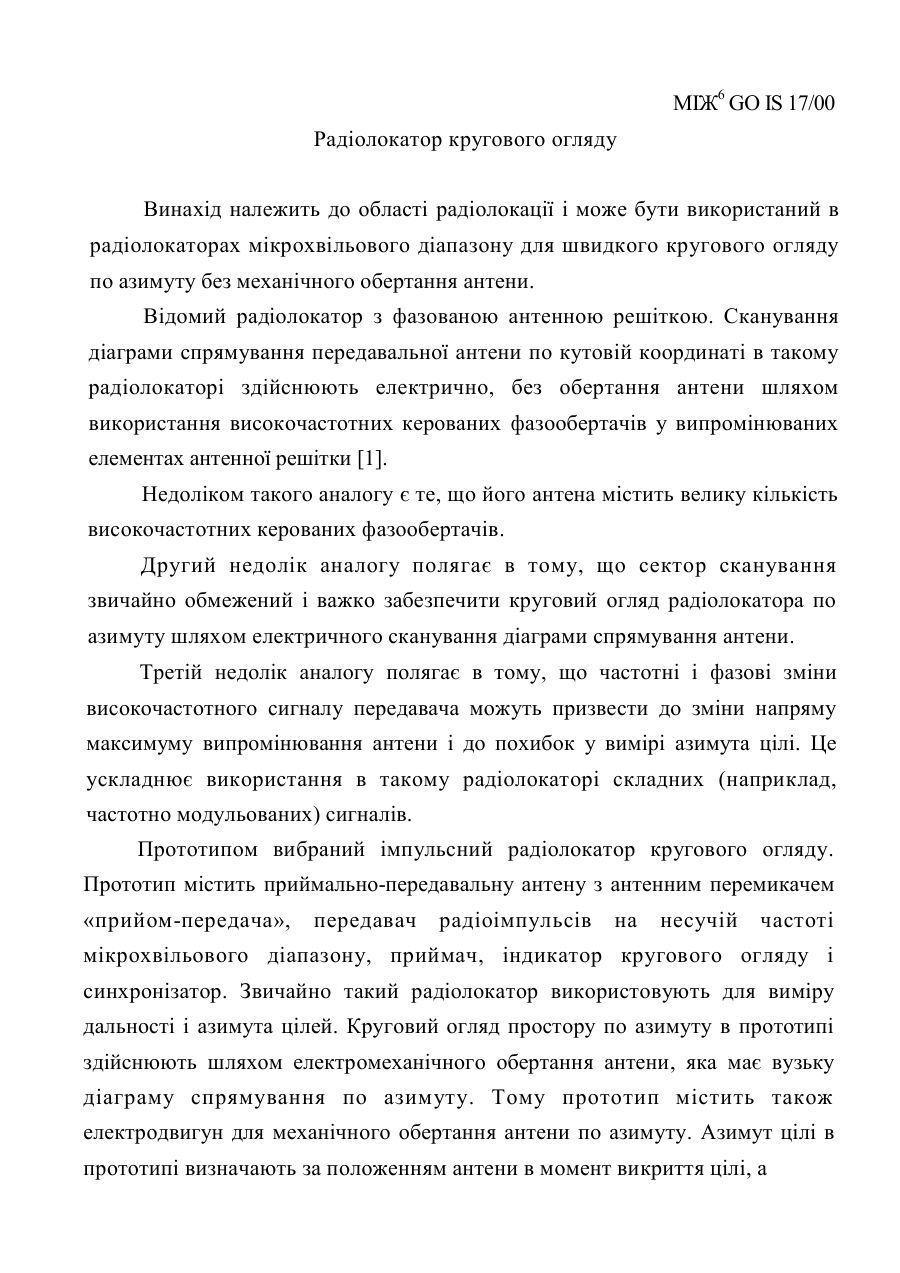
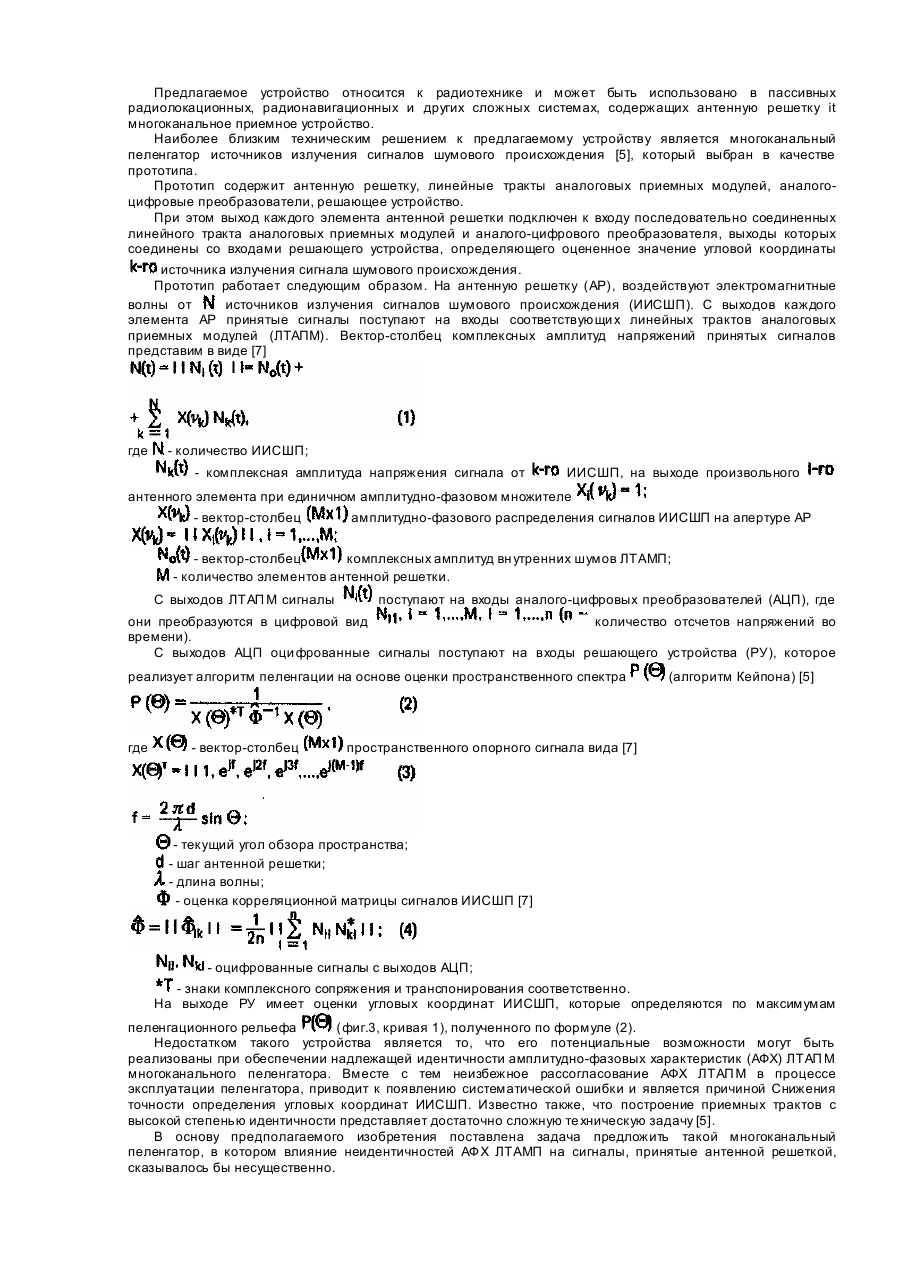
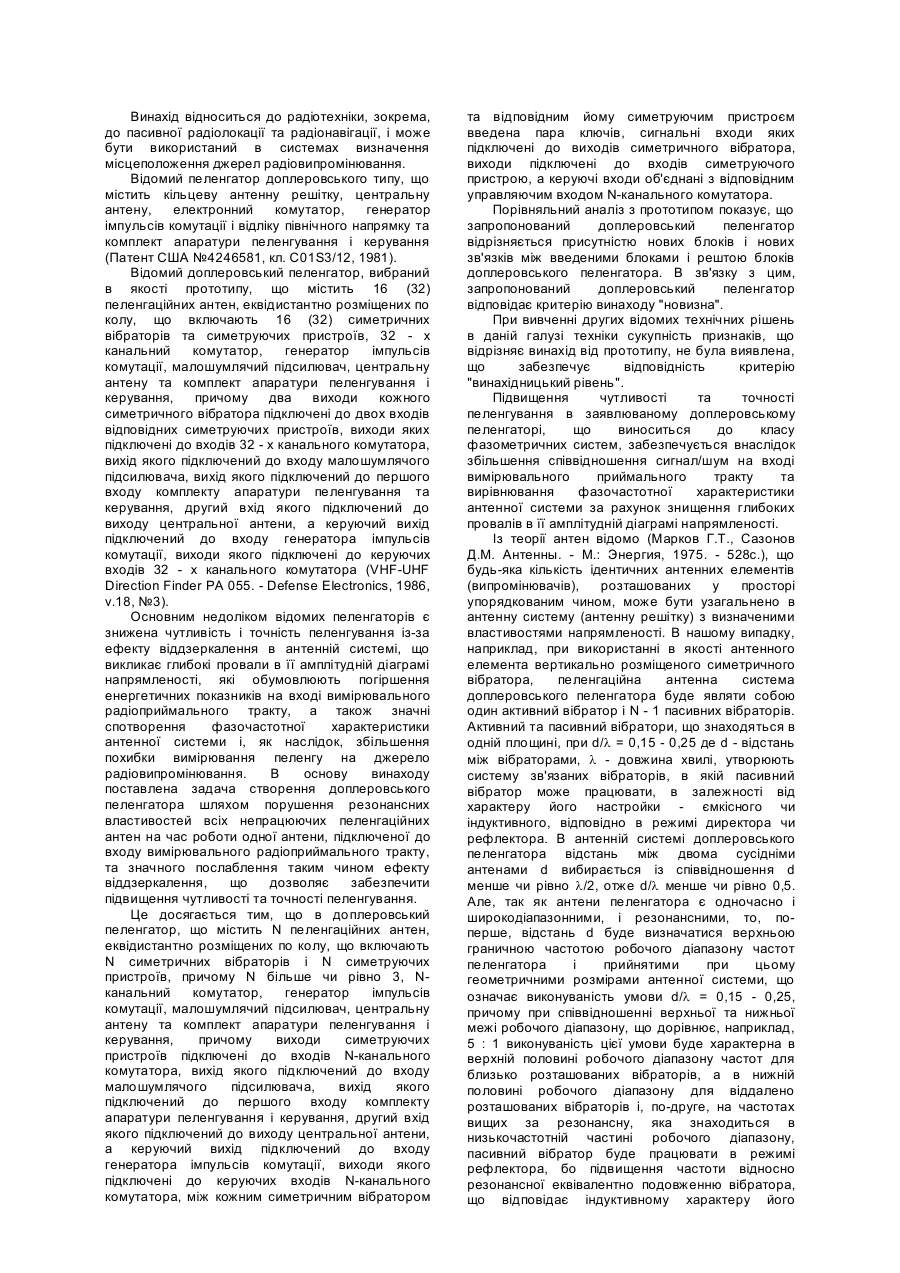
Двосигнальний пеленгатор на індикаторі кругового огляду, який містить антенну решітку (АР) кожен n-й вихід елементів якої (n=1, 2, ..., N, N=2i, i=1, 2 і т.д.) з'єднаний з відповідними входами перетворювача Адамара (ПА), який містить HxZ елементів сумарно-різницевої обробки (ЕС-РО) (H=N/2, Z=log2N) та має N входів і N виходів, кожен n-ний вихід якого з'єднаний з послідовно ввімкненими лінійним трактом аналогових приймальних модулів (ЛТАПМ) та аналого-цифровим перетворювачем (АЦП), вихід кожного n-го АЦП з'єднаний із входами 35826 де А - квадратна, невироджена матриця Адамара розмірності (NхN) [1]; N(t) - вектор-стовпчик (Nх1) прийнятих АР сигналів виду (1). З виходів ПА перетворені сигнали надходять до відповідних входів ЛТАП М, в результаті проходження сигналів через ЛТАПМ, здійснюється їx збурення за рахунок неідентичності амплітуднофазових характеристик (АФХ) ЛТАПМ. Неідентичності АФХ ЛТАП М представляються у вигляді діагональної матриці S = diag Vn e jGn , n = 1, 2, ..., N того, інформація про кутові координати ДВСПШ надходить до оператора з деякою затримкою яка визначається часом формування середньостатистичної кореляційної матриці сигналів (КМС) та часом обробки за допомогою пошукового алгоритму Кейпона. В основу винаходу поставлена задача запропонувати такий пеленгатор, який дав би змогу отримувати інформацію про кутові координати ДВСШП в реальному масштабі часу, при цьому відмовитись від обробки квадратурної (уявної) складової, а саму обробку проводити в аналоговому вигляді, причому інформацію відображати за допомогою індикатору кругового огляду, шляхом введення нових елементів, нових форм виконання елементів та нових зв'язків між елементами. На фіг. 1 представлена структурна схема пропонованого пристрою - двосигнального пеленгатора на індикаторі кругового огляду. На фіг. 2 представлена структурна схема перетворювача Адамара при N=2. Пропонований пристрій (фіг. 1) містить: антенну решітку 1, перетворювач Адамара 2, лінійні тракти аналогових приймальних модулів 3, фазоповертач на 90 градусів 4, схему ділення напруг 5, індикатор кругового огляду 6. Антенна решітка 1, являє собою лінійну еквідистантну трьохелементну АР з кроком d [2]. Перетворювач Адамара 2, містить один ЕСРО в якості якого можуть бути використані, наприклад подвійний хвилевідний трійник, кільцевий міст. В матричній формі ПА для N=2 має вид [1]: æ + 1 + 1ö A =ç (7) ç + 1 - 1÷ ÷ è ø Лінійний тракт аналогових приймальних модулів 3.1, 3.2, 3.3, містить в собі, перетворювач частоти, фільтр проміжних частот, підсилювач проміжної частоти. Фазообертач на 90 градусів 4, здійснює поворот фази сигналу на другому виході ПА на 90 градусів. Схема ділення напруг 5.1, 5.2, реалізує операцію нормування сигналів на виході першого ЛТАП М (ЛТАПМ 3.1) та ФП-90 відносно амплітуди сигналу на виході третього ЛТАПМ (ЛТАП М 3.3), за яку може бути використана, наприклад схема множення/ділення напруг сигналі в. Індикатор кругового огляду 5, здійснює відображення результатів обробки сигналів, в якості якого можливо використовува ти наприклад, уніфікований індикатор ПІКЕТ або звичайний осцилограф який має два входи. Поставлена задача вирішується тим, що двосигнальний пеленгатор на індикаторі кругового огляду, який містить АР, кожен вихід елементів якої з'єднаний з відповідними входами ПА, кожен вихід якого з'єднаний з послідовно ввімкненими ЛТАП М та АЦП, ви ходи АЦП з'єднані із входами рішаючого пристрою (РП), виходом якого є оцінене значення кутової координати m-го ДВСШП, відрізняється тим (фіг. 1), що в ньому АР має три елементи (N=3), ПА реалізовано для N=2 (фіг. 2), тобто він містить ЕС-РО, ПА має два входи перший та другий якими є перший та другий входи ЕС-РО, ПА має два виходи перший та другий якими є відповідно сумарний та різницевий виходи ЕС-РО, пер (3) де Vn - дійсний множник, що характеризує амплітудні збурення в n-му ЛТАП; Gn - дійсний множник, що характеризує фазові збурення в n-му ЛТАПМ p Gn = Wn ; 180 Wn - дійсний множник, що характеризує фазові збурення в n - му ЛТАПМ, виражені в градуса х. В результаті проходження сигналів NA(t) через ЛТАП М маємо: Y( t ) = Yn ( t ) = SN A ( t ) (4) З виходів ЛТАП М сигнали Yn(t) поступають до входів АЦП, де вони перетворюються в цифровий вид. Цифровий код сигналу кожного тракту позначено: Yn,l, де n=1, 2…N, l=1, 2…L, (L - кількість відліків напруг за час спостереження, l - номер відліку). Кількість таких відліків визначається часом спостереження T і дорівнює L=T/Δt, де Δt інтервал дискретизації. З виходів АЦП сигнали Yn,l поступають до входів РП, який реалізує алгоритм пеленгації ДВСШП на основі обробки оціненої кореляційної матриці сигналів (КМС) (пошуковий алгоритм Кейпона), який наведено у вигляді формули: 1 PПР (Θ) = , (5) ) -1 *Т XПР ( Θ) ΦПР Х ПР ( Θ) де ХПР (Θ) - перетворений вектор-стовпчик (Nx1) просторового опорного сигналу виду: ХПР (Θ) = АХ(Θ) = АХ(Θ), Х(Θ )Т = 1 е jf , e j2 f , e j3 f , ..., e j( N -1)f , , 2dp sin Θ; l Θ - поточний кут огляду простору; d - крок АР; l довжина хвилі; *, T - знаки комплексного спряження ) та транспонування відповідно; Φ пр - оцінка кореf = ляційної матриці по перетворених та збурених сигналах ДВСПШ, має вид: ) ) 1 n Φ пр = ΦПРn, k = (6) å Yn,lYk*,T . n 2L l= 1 Yn,l - сигнали ви ходів АЦП. На виході РП маємо оцінки кутови х координат ДВСШП, які визначаються по максимумам пеленгаційного рельєфу (функції P(Θ ) ) (5). Недоліком такого пристрою є те, що його потенційні можливості можуть бути реалізовані при умові, коли неідентичності фазових характеристик не більше 30 градусів, а амплітудні неідентичності не повинні перевищува ти 5%. Побудова приймальних каналів з високим степенем ідентичності являє достатньо складну те хнічну задачу. Крім 2 35826 ший вихід ПА з'єднано із входом ЛТАПМ 3.1, другий вихід ПА з'єднано із послідовно ввімкненими ФО-90 та ЛТАП М 3.2, сигнал на виході середнього (центрального) елементу АР перетворюваного Адамара не підлягає, а використовується як опорний, вихід якого з'єднано із входом ЛТАПМ 3.3, АЦП та РП відсутні, а їх функції покладено на схему ділення напруг (СДН) та індикатор кругового огляду (ІКО), СНД має два входи (перший та другий) та один вихід, ви хід ЛТАМП 3.1 з'єднано із першим входом СДН 5.1, ви хід ЛТАП М 3.2 з'єднано із першим входом СДН 5.2, вихід ЛТАП М 3.3 з'єднано із другими входами СДН 5.1 та СДН 5.2, виходи першої та другої СДН з'єднано із входами ІКО, який відображає інформацію (результат оцінки кутових координат сигналів ДCШП). Застосування пропонованого пристрою дає можливість отримувати інформацію про кутові координати ДВСЩП в реальному масштабі часу, при цьому відмовитись від обробки сигналів представлених в комплексному вигляді, а перейти до доробки дійсної частини сигналів, причому обробку сигналів проводити в аналоговому вигляді та відображати за допомогою ІКО. Пристрій працює таким чином (фіг. 1) при дії електромагнітних хвиль від М ДВСПШ на N елементів АР (при цьому необхідно додержуватись таких обмежень, по-перше, кількість елементів АР повинна бути більшою за кількість ДВСШП (M
ДивитисяДодаткова інформація
Назва патенту англійськоюTwo-signal direction finder on indicator of round scan
Автори англійськоюVahapov Arslan Minhazovych, Kubrak Oleksandr Mykolaiovych, Pryimachuk Oleh Vitaliiovych
Назва патенту російськоюДвух сигнальный пеленгатор на индикаторе кругового обзора
Автори російськоюВагапов Арслан Мингазович, Кубрак Александр Николаевич, Приймачук Олег Витальевич
МПК / Мітки
МПК: G01S 3/00
Мітки: огляду, індикаторі, кругового, двосигнальний, пеленгатор
Код посилання
<a href="https://ua.patents.su/7-35826-dvosignalnijj-pelengator-na-indikatori-krugovogo-oglyadu.html" target="_blank" rel="follow" title="База патентів України">Двосигнальний пеленгатор на індикаторі кругового огляду</a>
Радіолокатор кругового огляду
Номер патенту: 32196
Опубліковано: 15.12.2000
Автори: Кудрик Андрій Миколайович, Пророшин Сергій Михайлович, Бахвалов Валентин Борисович
МПК: G01S 17/00
Мітки: радіолокатор, кругового, огляду
Текст:
...діаграма спрямування передавальної антени в горизонтальній площині. До складу запропонованого пристрою на фіг. 1 входять такі основні елементи: перший приймальний вібратор 1, що приймає луна-сигнали цілей з передньої напівсфери; другий приймальний вібратор 2, який приймає луна-сигнали цілей з задньої напівсфери; плоский металевий рефлектор 3 приймальної антени; перший 4 і другий 5 приймачі, пов'язані відповідно з першим і другим вібраторами...
Багатоканальний пеленгатор джерел випромінювання сигналів шумового походження
Номер патенту: 21580
Опубліковано: 06.01.1998
Автори: П'ясковський Дмитро Володимирович, Парфенюк Василь Григорович, КУБРАК ОЛЕКСАНДР МИКОЛАЙОВИЧ
МПК: G01S 3/00
Мітки: джерел, сигналів, багатоканальний, випромінювання, шумового, походження, пеленгатор
Формула / Реферат:
Многоканальный пеленгатор источников излучения сигналов шумового происхождения, содержащий антенную решетку (АР), каждый i-тый выход элементов которой, подключен к последовательно соединенным линейному тракту аналоговых приемных модулей (ЛТАПМ) и аналого-цифровому преобразователю (АЦП), выходы которых подключены к входам решающего устройства (РУ), определяющего оцененное значение угловой координаты к-го источника излучения сигнала...
Доплеровський пеленгатор
Номер патенту: 24676
Опубліковано: 04.08.1998
Автори: Литвиненко Валентин Іванович, Лігінов Сергій Михайлович, Сирма Олексій Олексійович, Бєліков Евген Миколайович, Мєдвєдєв Сергій Леонідович, Муратов Олександр Олексійович, Гудзюк Василь Петрович
МПК: G01S 3/14
Мітки: пеленгатор, доплеровський
Формула / Реферат:
Доплеровський пеленгатор, що містить N пеленгаційних антен, еквідистантно розташованих по колу, що включають N симетричних вібраторів і N симетруючих пристроїв, причому N більше чи рівно 3, N-канальний комутатор, генератор імпульсів комутації, малошумлячий підсилювач, центральну антену та комплект апаратури пеленгування і керування, причому виходи симетруючих пристроїв підключені до входів N-канального комутатора, вихід якого підключений до...
Пеленгатор для визначення кутових координат джерела імпульсного несинусоїдального сигналу
Номер патенту: 15412
Опубліковано: 30.06.1997
Автори: Родін Олександр Валерійович, Бахвалов Борис Миколайович, Хом'яков Олег Миколайович, Жуков Сергій Анатолійович
МПК: G01S 17/06
Мітки: несинусоїдального, кутових, координат, імпульсного, визначення, джерела, сигналу, пеленгатор
Формула / Реферат:
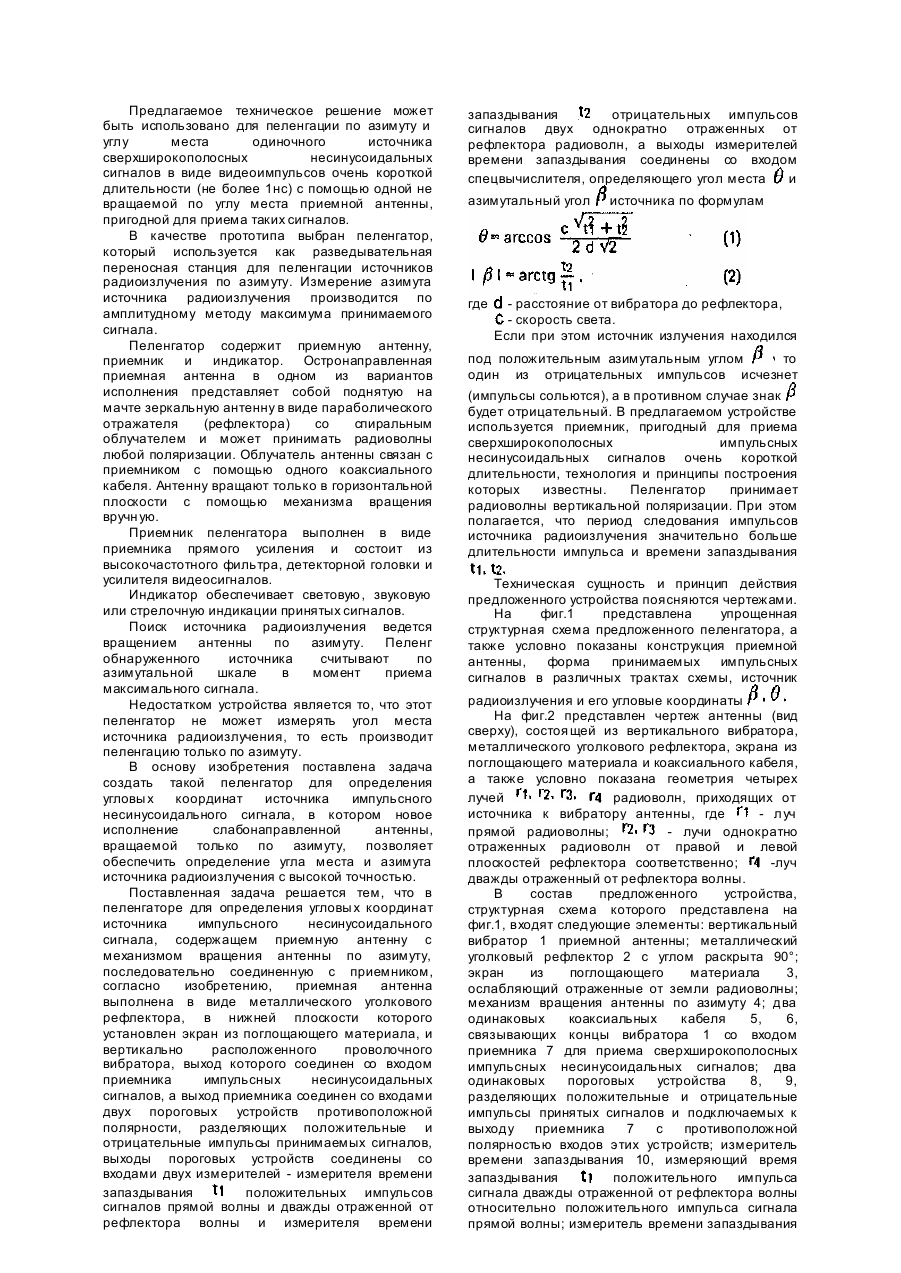
Пеленгатор для определения угловых координат источника импульсного несинусоидального сигнала, содержащий приемную антенну с механизмом вращения антенны по азимуту, последовательно соединенную с приемником, отличающийся тем, что приемная антенна выполнена в виде металлического уголкового рефлектора, в нижней плоскости которого установлен экран из поглощающего материала, и вертикально расположенного проволочного вибратора, выход которого...
Радіометрична система огляду
Номер патенту: 12470
Опубліковано: 28.02.1997
Автори: Пустоваров Володимир Євгенович, Сотніков Олександр Михайлович, Ареп'єв Сергій Вікторович, Прібилєв Юрій Борисович
МПК: G01S 5/02, G01R 29/08
Мітки: огляду, система, радіометрична
Формула / Реферат:
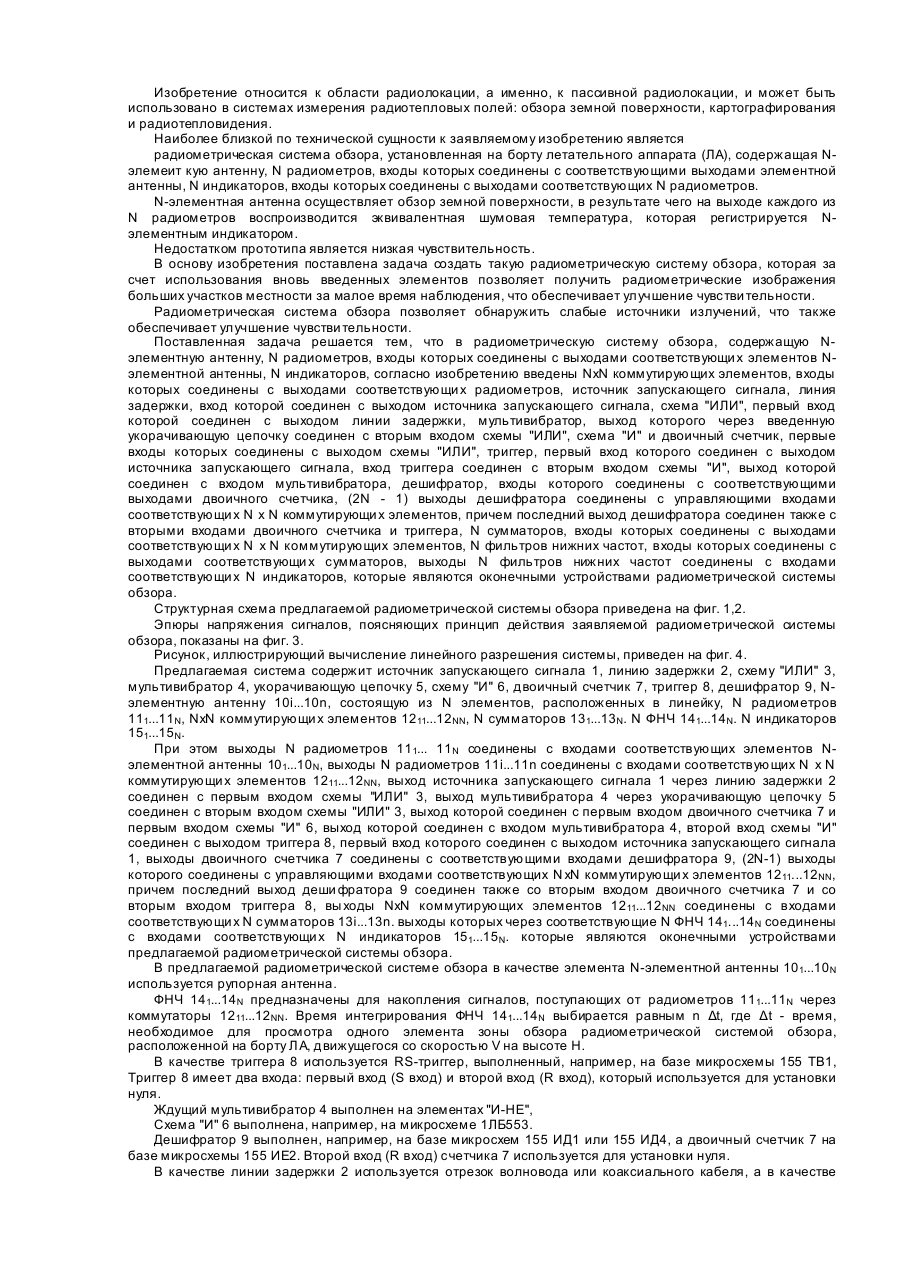
Радиометрическая система обзора, содержащая N-элементную антенну, N радиометров, входы которых соединены с выходами соответствующих элементов N-элемептиой антенны, N индикаторов, отличающаяся тем, что в нее введены N х N коммутирующих элементов, входы которых соединены с выходами соответствующих радиометров, источник запускающего сигнала, линия задержки, вход которой соединен с выходом источника запускающего сигнала, схема...
Попередній патент: Консерви для дитячого харчування
Наступний патент: Спосіб лікування хімічних опіків та гнійно-запальних процесів переднього відділу ока
Випадковий патент: Пристрій для вимірювання прискорення