Рухома наземна двокоординатна радіолокаційна станція кругового огляду метрового діапазону хвиль
Номер патенту: 10906
Опубліковано: 15.12.2005
Автори: Харітонов Сєргєй Алєксандровіч, Колдоркіна Наталья Романовна, Москалєнко Сєргєй Валєрьєвіч, Коган Сємьон Міхайловіч, Бомштейн Алєксандр Давідовіч

Формула / Реферат
1. Рухома наземна двокоординатна радіолокаційна станція (РЛС) кругового огляду метрового діапазону хвиль, що містить послідовно з'єднані формувач зондувальних сигналів, передавальний пристрій, основну антену з датчиком азимуту та приймальний пристрій основного каналу, а також послідовно з'єднані пристрій первинної обробки (ППО), пристрій відображення, керування і контролю (ПКК) і пристрій сполучення, яка відрізняється тим, що до неї введені другий формувач зондувальних сигналів, вихід якого з'єднаний із другим входом передавального пристрою, послідовно включені аналого-цифровий перетворювач (АЦП) і автокомпенсатор шумової активної перешкоди (ШАП), що з'єднують вихід приймального пристрою основного каналу із першим входом ППО, компенсаційна антена, приймальний пристрій компенсаційного каналу і другий АЦП, причому чотири виходи компенсаційної антени з'єднані з чотирма першими входами приймального пристрою компенсаційного каналу, п'ятий вхід якого з'єднаний із другим виходом основної антени з датчиком азимуту, а три його виходи, через другий АЦП - із другим, третім і четвертим входами автокомпенсатора ШАП, а також пристрій вторинної обробки (ПВО) і пристрій імітації і тренажу, перший вихід якого з'єднаний із другим входом ПВО, а другі і третій його виходи - із другим входом приймального пристрою основного каналу і шостим входом приймального пристрою компенсаційного каналу, відповідно, перший і другий входи-виходи ПВО з'єднані, відповідно, з виходами-входами пристроїв ПКК і сполучення, а перший вхід - із другим виходом ППО, другий вхід якого з'єднаний с виходом АЦП.
2. РЛС за п. 1, яка відрізняється тим, що передавальний пристрій, розміщений в апаратній кабіні РЛС, є твердотільним монопередавачем, побудованим за принципом підсумовування потужності великого числа широкосмугових транзисторних підсилювачів потужності, виконаних у вигляді герметичних модулів.
3. РЛС за п. 1, яка відрізняється тим, що компенсаційна антена є стаціонарною і містить чотири випромінювачі, розташовані попарно під кутом 90° у горизонтальній площині на двох щоглах, установлених по різні боки основної антени так, щоб кут між усіма чотирма випромінювачами в горизонтальній площині становив 90°.
4. РЛС за п. 1, яка відрізняється тим, що приймальний пристрій основного каналу має великий динамічний діапазон, що реалізується шляхом оптимального розподілу посилення по тракту, сполучення транзисторів різної потужності, звуження смуги пропускання на несучій частоті за рахунок застосування вузькосмугових фільтрів на спіральних резонаторах.
5. РЛС за п. 1, яка відрізняється тим, що приймальний пристрій компенсаційного каналу містить перемикач "три з чотирьох" і три приймальні пристрої, аналогічні приймальному пристроєві основного каналу.
6. РЛС за п. 1, яка відрізняється тим, що автокомпенсатор ШАП і ППО виконано на базі спеціалізованої ЕОМ з використанням сигнальних процесорів.
7. РЛС за п. 1, яка відрізняється тим, що ПВО та пристрої ПКК, сполучення, імітації і тренажу реалізовано на базі ЕОМ з кольоровим відеомонітором високого розділення.
Текст
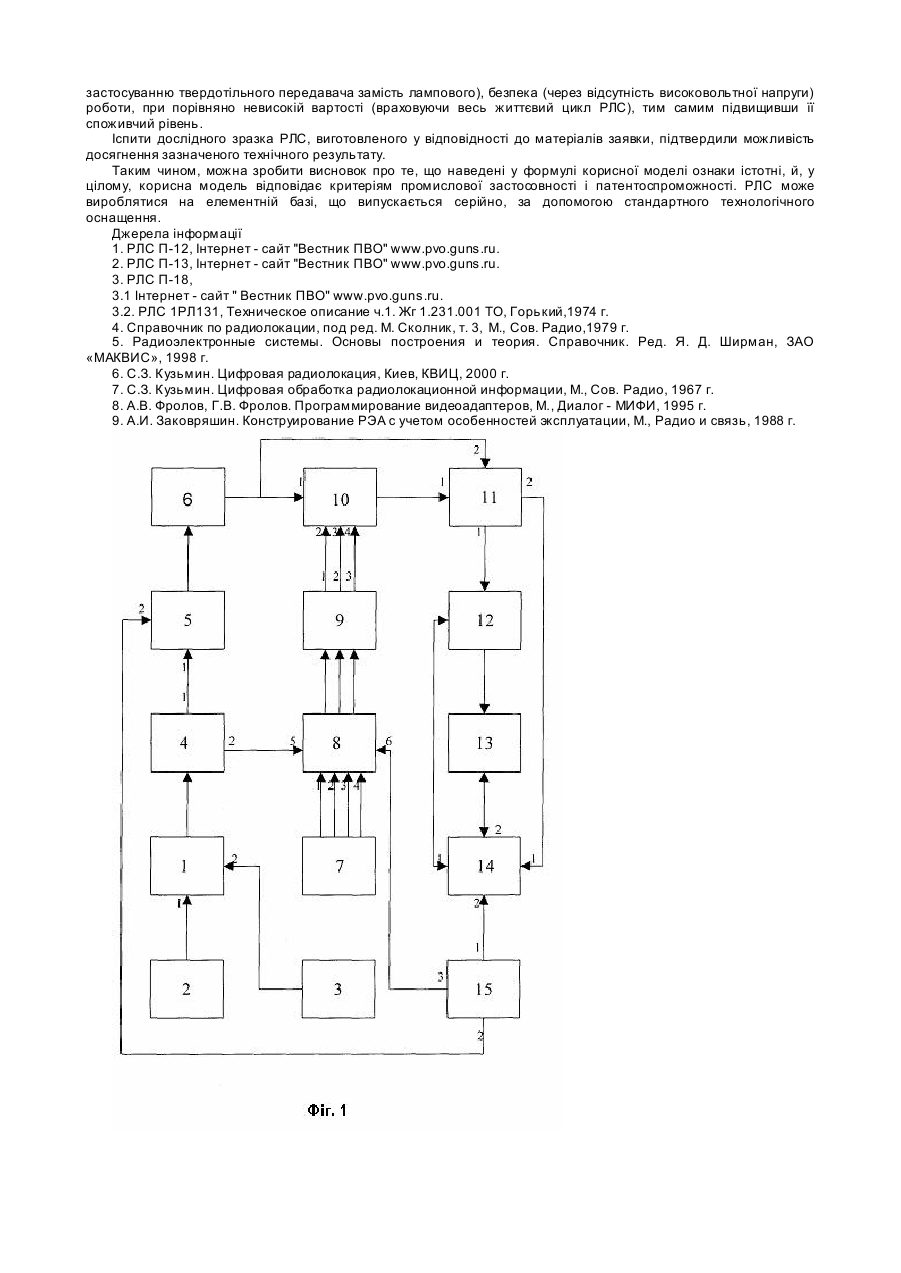
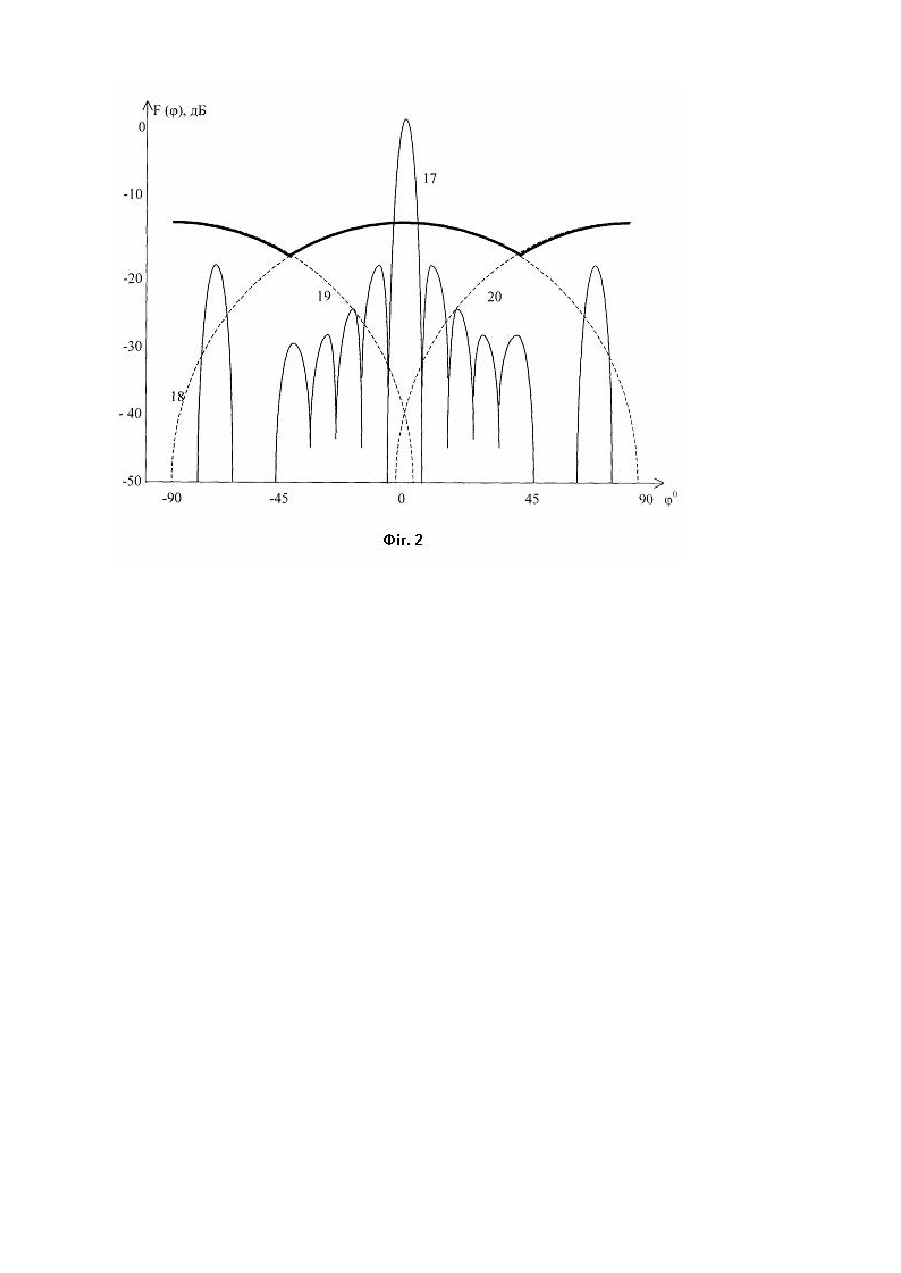
Корисна модель відноситься до радіолокації і може бути використана для виявлення повітряних цілей, виміру їхні х координат і надання цілевказівки щодо дальності й азимуту, як при автономній роботі, так і при роботі у складі автоматизованих систем керування. Відомі РЛС аналогічного призначення [1, 2], які містять антену, передавальний пристрій на електровакуумних приладах, приймач, пристрій первинної обробки радіолокаційних сигналів, індикатор кругового огляду та інші необхідні системи, що забезпечують працездатність РЛС. Недоліком цих РЛС є низька точність виміру координат, невисока надійність, і, у цілому, не відповідні сучасному рівневі тактико-технічні й експлуатаційні характеристики. Найбільш близькою за технічною сутністю і призначенням до заявленої РЛС є принята за прототип рухома наземна двокоординатна РЛС кругового огляду метрового діапазону хвиль П-18 (індекс 1РЛ131) [3]. На відміну від інших аналогів, ця РЛС має із заявленою РЛС близькі середню потужність випромінювання, зону огляду і діапазон, а також однакові основну антену та апаратну кабіну. РЛС - прототип складається з передавального пристрою і формувача зондувальних сигналів, які використовують електровакуумні прилади основної антени із датчиком азимуту, лампового приймального пристрою, пристрою первинної обробки радіолокаційних сигналів, пристрою відображення, керування та контролю і пристрою сполучення. Недоліком прототипу є невисокі тактико-технічні й експлуатаційні характеристики (точність, перешкодозахищеність, надійність та ін.), що в значній мірі пояснюється використанням застарілої елементної бази й аналогових способів обробки сигналу. Технічним результатом корисної моделі є зменшення обсягу апаратури РЛС, підвищення надійності, перешкодовитривалості, поліпшення характеристик точності, забезпечення функціонального і безперервного контролю працездатності апаратури і можливості тренажу операторів РЛС, поліпшення експлуатаційних характеристик, можливість сполучення із сучасними автоматизованими системами керування (АСК). Технічний результат досягається тим, що у відому РЛС, що містить передавальний пристрій, формувач зондувальних сигналів, основну антену із датчиком азимута, приймальний пристрій, пристрій первинної обробки радіолокаційних сигналів (ППО), пристрій відображення, керування і контролю (ВКК) і пристрій сполучення, введені другий формувач зондувальних сигналів, аналого-цифровий перетворювач (АЦП), компенсаційна антена, приймальний пристрій компенсаційного каналу, другий АЦП, автокомпенсатор шумових активних перешкод (ШАП), пристрій вторинної обробки ПВО і пристрій імітації та тренажу із відповідними зв'язками. Для пояснення роботи пропонованої корисної моделі наведені структурна схема РЛС (Фіг.1) і розрахункові діаграми спрямованості (ДС) основної та компенсаційної антен в азимутальній площині (Фіг.2). На Фіг.1 позначені: 1 - передавальний пристрій; 2 - формувач зондувальних сигналів; 3 - другий формувач зондувальних сигналів; 4 - основна антена з датчиком азимуту; 5 - приймальний пристрій основного каналу; 6 - аналого-цифровий перетворювач (АЦП); 7 - компенсаційна антена; 8 - приймальний пристрій компенсаційного каналу; 9 - другий аналого-цифровий перетворювач (другої АЦП); 10 - автокомпенсатор ШАП; 11 - пристрій первинної обробки (ППО); 12 - пристрій відображення, керування і контролю (ВКК); 13 - пристрій сполучення; 14 - пристрій вторинної обробки (ПВО); 15 - пристрій імітації і тренажу. Стрілками показані зв'язки між блоками і пристроями. На Фіг.2 показані діаграми спрямованості 17 основної антени 4 і окремих випромінювачів 18, 19, 20 компенсаційної антени 7, суцільною жирною лінією показана об'єднана ДС компенсаційної антени 7. РЛС (Фіг.1) містить передавальний пристрій 1, два формувачі зондувальних сигналів 2, 3, основну антену з датчиком азимуту 4, приймальний пристрій основного каналу 5, аналого-цифровий перетворювач 6, компенсаційну антену 7, приймальний пристрій компенсаційного каналу 8, другий аналого-цифровий перетворювач 9, автокомпенсатор ШАП 10, пристрій первинної обробки 11, пристрій відображення, керування і контролю 12, пристрій сполучення 13, пристрій вторинної обробки 14 і пристрій імітації і тренажу 15, причому виходи дво х формувачів 2, 3 зондувальних сигналів з'єднані із першим і другим входами передавального пристрою 1, вихід якого з'єднаний із входом основної антени з датчиком азимуту 4, перший вихід якої через прийомний пристрій основного каналу 5, АЦП 6 і автокомпенсатора ШАП 10 з'єднаний послідовно з першим входом ППО 11, а другий - з п'ятим входом приймального пристрою компенсаційного каналу 8, чотири перших входи якого з'єднані з чотирма виходами компенсаційної антени 7, а три виходи - через другий АЦП 9 із другим, третім і четвертим входами автокомпенсатора ШАП 10, другий вхід ППО 11 з'єднаний з виходом АЦП 6, його перший вихід через пристрій ВКК 12 і сполучення 13 послідовно з'єднаний із другим входом-виходом ПВО 14, а другий - з першим входом ПВО 14, перший вхід-вихід якого з'єднаний з виходом-входом пристрою ВКК 12, а другий вхід - з першим виходом пристрою імітації і тренажу 15, другий і третій виходи якого з'єднані, відповідно, із другим входом приймального пристрою основного каналу 5 і шостим входом приймального пристрою компенсаційного каналу 8. Передавальний пристрій 1, розміщений в апаратній кабіні РЛС, є твердотільним монопередавачем, побудованим за принципом складання потужності великого числа широкосмугових транзисторних посилювачів потужності, що виконані у ви гляді герметичних модулів. Основна антена 4 постає у вигляді антенних ґрат, що складаються з 16 випромінювачів, розташованих у два поверхи по 8 випромінювачів у поверсі, і встановлених на щогловому пристрої, розміщеному на автомобілі. Основна антена містить датчик кута її повороту - датчик азимуту, з яким вона сполучена кінематично. Компенсаційна антена 7 є стаціонарною і містить чотири випромінювачі, розташовані попарно під кутом 90° у горизонтальній площині на двох щогла х, установлених по різні боки від основної антени так, щоб кут між усіма чотирма випромінювачами в горизонтальній площині складав 90°. Приймальний пристрій основного каналу 5, у якому, на відміну від прототипу, використовуються малошумні транзисторні підсилювачі, кільцеві діодні змішувачі, фільтри на поверхових акустични х хвилях і спіральні резонатори, має великий динамічний діапазон, що реалізується шляхом оптимального розподілу посилення по тракту, сполуки транзисторів різної потужності, використання автоматичного регулювання посилення, звуження смуги пропущення на несучій частоті за рахунок застосування вузькосмугових фільтрів на спіральних резонаторах. Приймальний пристрій компенсаційного каналу 8 містить перемикач "три з чотирьох" і три приймальні пристрої, аналогічні приймальному пристроєві основного каналу 5. Автокомпенсатор ШАП 10 і ППО 11 виконано на базі спеціалізованої ЕОМ з використанням сигнальних процесорів. ПВО 14 і пристрої ВКК 12, сполучення 13, імітації і тренажу 15 реалізовані на базі ЕОМ з кольоровим відеомонітором високого розділення. На Фіг.1 для спрощення структурної схеми не показані пристрої і зв'язки, що здійснюють тимчасову й азимутальну синхронізацію, а також контроль роботи різних пристроїв РЛС. РЛС працює в такий спосіб. З метою забезпечення необхідних значень здатності розділення, по дальності і зони виявлення цілі на тлі місцевих предметів, зондування простору здійснюється двома послідовностями імпульсів: основний, тривалість імпульсів якого вибирається з умови забезпечення необхідного енергетичного потенціалу РЛС, і додатковою послідовністю коротких імпульсів, що мають меншу середню потужність, призначеною для виявлення радіолокаційних цілей, що знаходяться в ближній зоні на далях, відповідних тривалості зондувального імпульсу основної послідовності. Обидві послідовності імпульсів мають однакову середню частоту повторів, але зміщені у часі. У якості основної послідовності імпульсів використовуються линійно-частотно-модульовані (ЛЧМ) сигнали, а в якості додаткової - сигнали, фазоманіпульовані (ФМ) за законом Баркера [4]. Ці сигнали, що формуються, відповідно, блоками 2 і 3, підсилюються за високою частотою передавальним пристроєм 1 і через антенний комутатор (на Фіг.1 не показаний) випромінюються основною антеною 4 у простір. Відбиті від цілі ехосигнали, прийняті основною антеною 4, через антенний комутатор надходять до приймального пристрою основного каналу 5, де селектуються за частотою і посилюються, а потім перетворюються на цифровий код в АЦП 6. Далі сигнали надходять на вхід 1 автокомпенсатора ШАП 10, а на його входи 2, 3, 4 - перетворені АЦП 9 на цифровий код сигнали з із приймального пристрою компенсаційного каналу 8, на який надходять чотири сигнали активної перешкоди від стаціонарної компенсаційної антени 7. При обертанні основної антени 4 через кожні 90° за сигналом датчика азимуту основної антени 4 у приймальному пристрої компенсаційного каналу 8 за допомогою перемикача "три з чотирьох" провадиться вибір тих трьох з чотирьох сигналів випромінювачів компенсаційної антени 7, діаграми спрямованості яких у даний момент перекривають передню півсферу основної антени 4 (Фіг.2). Таким чином, за допомогою переключення сигналів випромінювачів об'єднана ДС компенсаційної антени 7 "обертається" у горизонтальній площині дискретно, синхронно з обертанням основної антени 4, забезпечуючи прийом сигналів активної перешкоди, що приходять з будь-якого азимутального напрямку від 0 до 360°. При цьому автокомпенсатор ШАП 10 забезпечує захист від шумових активних перешкод, що діють на бічних пелюстках ДС основної антени 4 з одного, двох або трьох напрямків [5]. ВПО 11 здійснює квазиоптимальну внутрішньоперіодну (стиск) і міжперіодну (когерентне нагромадження азимутальної пачки) обробку сигналів, що поступають з ви ходу автокомпенсатора ШАП 10 на його перший вхід, виявлення і вимір координат цілі, пригнічення сигналів, відбитих від місцевих предметів і гідрометеорів за рахунок їхньої частотної режекції, виявлення ехосигналів цілей в умовах впливу дипольних перешкод за рахунок їх вирішення за допплерівською частотою, а також пеленгацію постановників шумових активних перешкод і аналіз перешкодної обстановки на підставі обробки сигналів, що надходять з виходу АЦП 6 на другий вхід ППО 11 [6]. ПВО 14 за інформацією, що надходить з ППО 11, забезпечує автоматичну і напівавтоматичну зав'язку трас і автоматичний супровід повітряних об'єктів з великою продуктивністю (до 120 трас) [6, 7]. Пристрій ВКК 12 забезпечує відображення на відеомоніторі ЕОМ радіолокаційної (первинної та вторинної) і службової інформації, що надходить з ППО 11, УВО 14 і пристроїв сполучення 13 та імітації і тренажу 15 (через ПВО 14), керування режимами роботи РЛС і її окремих пристроїв, керування радіовисотоміром і радіозапитником через пристрій сполучення 13, контроль основних параметрів, що визначають тактико-технічні характеристики РЛС, у тому числі контроль ряду параметрів без порушення штатного режиму роботи РЛС, та автоматизований пошук несправностей, документування і відтворення на відеомоніторі ЕОМ усієї необхідної інформації [8, 9]. Пристрій сполучення 13 забезпечує видачу первинної і вторинної радіолокаційної інформації споживачам (автоматизованим системам керування), обмін інформацією з радіовисотоміром і радіозапитником. Пристрій імітації і тренажу 15 формує до 60 незалежних імітаційних трас повітряних об'єктів різних класів, що забезпечує можливість тренажу операторів РЛС. Пристрій імітації і тренажу 15 формує також імітаційні ехосигнали повітряних об'єктів і сигнали пасивних і активних перешкод, що подаються, відповідно, на прийомні пристрої 5 і 8 і надалі обробляються штатною апаратурою РЛС аналогічно реальним сигналам, що дозволяє здійснювати перевірку працездатності ряду основних пристроїв РЛС. З опису видно, що запропонована двокоординатна РЛС кругового огляду метрового діапазону хвиль у порівнянні з прототипом дозволяє підвищити те хнічні (точність, перешкодозахищеність) і поліпшити такі експлуатаційні характеристики, як простота, надійність, ресурс, ремонтопридатність (у тому числі завдяки застосуванню твердотільного передавача замість лампового), безпека (через відсутність високовольтної напруги) роботи, при порівняно невисокій вартості (враховуючи весь життєвий цикл РЛС), тим самим підвищивши її споживчий рівень. Іспити дослідного зразка РЛС, виготовленого у відповідності до матеріалів заявки, підтвердили можливість досягнення зазначеного технічного результату. Таким чином, можна зробити висновок про те, що наведені у формулі корисної моделі ознаки істотні, й, у цілому, корисна модель відповідає критеріям промислової застосовності і патентоспроможності. РЛС може вироблятися на елементній базі, що випускається серійно, за допомогою стандартного технологічного оснащення. Джерела інформації 1. РЛС П-12, Інтернет - сайт "Вестник ПВО" www.pvo.guns.ru. 2. РЛС П-13, Інтернет - сайт "Вестник ПВО" www.pvo.guns.ru. 3. РЛС П-18, 3.1 Інтернет - сайт " Вестник ПВО" www.pvo.guns.ru. 3.2. РЛС 1РЛ131, Техническое описание ч.1. Жг 1.231.001 ТО, Горький,1974 г. 4. Справочник по радиолокации, под ред. М. Сколник, т. 3, М., Сов. Радио,1979 г. 5. Радиоэлектронные системы. Основы построения и теория. Справочник. Ред. Я. Д. Ширман, ЗАО «МАКВИС», 1998 г. 6. С.З. Кузьмин. Цифровая радиолокация, Киев, КВИЦ, 2000 г. 7. С.З. Кузьмин. Цифровая обработка радиолокационной информации, М., Сов. Радио, 1967 г. 8. А.В. Фролов, Г.В. Фролов. Программирование видеоадаптеров, М., Диалог - МИФИ, 1995 г. 9. А.И. Заковряшин. Конструирование РЭА с учетом особенностей эксплуатации,М., Радио и связь, 1988 г.
ДивитисяДодаткова інформація
Назва патенту англійськоюMobile ground-based two-coordinate surveillance radar for a very-high-frequency band
Автори англійськоюKharitonov Serhei Aleksandrovich
Назва патенту російськоюПередвижная наземная двухкоординатная радиолокационная станция кругового обзора для диапазона метровых волн
Автори російськоюКолдоркина Наталья Романовна, Харитонов Сергей Александрович
МПК / Мітки
МПК: G01S 7/00, G01S 13/00
Мітки: станція, рухома, огляду, метрового, кругового, діапазону, радіолокаційна, наземна, хвиль, двокоординатна
Код посилання
<a href="https://ua.patents.su/4-10906-rukhoma-nazemna-dvokoordinatna-radiolokacijjna-stanciya-krugovogo-oglyadu-metrovogo-diapazonu-khvil.html" target="_blank" rel="follow" title="База патентів України">Рухома наземна двокоординатна радіолокаційна станція кругового огляду метрового діапазону хвиль</a>
Радіолокатор кругового огляду
Номер патенту: 32196
Опубліковано: 15.12.2000
Автори: Пророшин Сергій Михайлович, Бахвалов Валентин Борисович, Кудрик Андрій Миколайович
МПК: G01S 17/00
Мітки: радіолокатор, огляду, кругового
Текст:
...діаграма спрямування передавальної антени в горизонтальній площині. До складу запропонованого пристрою на фіг. 1 входять такі основні елементи: перший приймальний вібратор 1, що приймає луна-сигнали цілей з передньої напівсфери; другий приймальний вібратор 2, який приймає луна-сигнали цілей з задньої напівсфери; плоский металевий рефлектор 3 приймальної антени; перший 4 і другий 5 приймачі, пов'язані відповідно з першим і другим вібраторами...
Радіолокаційна станція
Номер патенту: 42179
Опубліковано: 15.10.2004
Автори: Мокеєв Юрій Геннадійович, Піза Дмитро Макарович, Немчин Олександр Федорович
МПК: G01S 13/42, G01S 7/36, G01S 13/00
Мітки: станція, радіолокаційна
Формула / Реферат:
Радіолокаційна станція, що містить дуально-поляризовану гостроспрямовану антену і всеспрямовану антену, з`єднані з відповідними каналами приймання, пристрої компенсації завад та обробки сигналів і індикатор, яка відрізняється тим, що станція додатково містить перший та другий порогові елементи, пеленгаційний пристрій, пристрій синхронізації, тривходову схему І, тригер, комутатори каналів та двоканальний комутатор, керівний вхід якого...
Двосигнальний пеленгатор на індикаторі кругового огляду
Номер патенту: 35826
Опубліковано: 16.04.2001
Автори: Приймачук Олег Віталійович, КУБРАК ОЛЕКСАНДР МИКОЛАЙОВИЧ, Вагапов Арслан Мінгазович
МПК: G01S 3/00
Мітки: індикаторі, огляду, пеленгатор, кругового, двосигнальний
Формула / Реферат:
Двосигнальний пеленгатор на індикаторі кругового огляду, який містить антенну решітку (АР), кожен n-ий вихід елементів якої (n=l,2,...,N, N=2і, і=1,2, і т.д.) з'єднаний з відповідними входами перетворювача Адамара (ПА), який містить HxZ елементів сумарно-різницевої обробки (ЕС-РО) (H=N/2, Z=log2N) та має N входів і N виходів, кожен n-ний вихід якого з'єднаний з послідовно ввімкненими лінійним трактом аналогових приймальних модулів (ЛТАПМ) та...
Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об’єктів
Номер патенту: 8961
Опубліковано: 15.08.2005
Автори: Толстіхін Микола Вікторович, Єна Григорій Олександрович, Шовгун Віталій Андрійович, Андрусенко Микола Іванович, Ліпатов Валерій Павлович, Білановський Михайло Миколайович, Біличенко Іван Федорович
Мітки: носіїв, радіолокаційна, випромінюючих, повітряних, координат, надводних, станція, об'єктів, пасивна, вимірювання
Формула / Реферат:
1. Пасивна радіолокаційна станція вимірювання координат носіїв надводних та повітряних випромінюючих об'єктів, що містить антену, привід антени, датчик сканування антени, приймач, блок визначення кутових координат, пристрій індикації, перший блок обчислення відстані, формувач керуючих сигналів, при цьому перший вхід антени через привід антени підключений до першого виходу датчика сканування антени, перший вихід антени підключений до першого...
Спосіб безпосереднього перетворення енергії електромагнітних хвиль оптичного діапазону в енергію електричного струму
Номер патенту: 33080
Опубліковано: 15.02.2001
Автор: Стецович Віктор Іванович
МПК: H02N 6/00
Мітки: діапазону, безпосереднього, спосіб, перетворення, хвиль, енергії, електромагнітних, оптичного, струму, електричного, енергію
Текст:
...поляризованості молекули (чи, іншими словами, фазові співвідношення між інтерферуючими ЕМХ). Звідси випливають наступні механізми реалізації запропонованого способу. 1. Однорідність середовища означає сталу кількість молекул, атомів, вільних електронів в однакових малих об"ємах, в яких під дією ЕМХ індукуються однаков і електричні моменти, зміна яких у часі веде до випромінювання когерентних вторинних хвиль однакової амплітуди. Якщо в...
Попередній патент: Спосіб біохімічної оцінки рівня імунних антитіл в організмі інфікованих тварин
Наступний патент: Низькошахтна піч процесу рідкофазного відновлення
Випадковий патент: Нарізне з`єднання