Спосіб високого розділення когерентних сигналів
Номер патенту: 71724
Опубліковано: 15.12.2004
Автори: Тимчук Володимир Юрійович, Бондаренко Борис Федорович

Формула / Реферат
1. Спосіб високого розділення когерентних радіолокаційних сигналів, що включає прийом відбитих від об'єктів сигналів антенною решіткою, перетворення сигналів з виходів приймальних каналів антенної решітки у цифрову форму, обчислення квадратичної форми оціночного вектора на виході неперенастроюваного фільтра-проектора, пошук максимального значення квадратичної форми і вектора параметрів, порівнювання максимального значення квадратичної форми з порогом, який відрізняється тим, що вектор сигналів, представлений у цифровому вигляді, помножується на перенастроювану передаточну функцію матричного фільтра-проектора й результат перемноження перетворюється в квадратичну форму, за якою визначається максимальне значення квадратичної форми, і вектор параметрів, для якого квадратична форма досягає максимального значення, використовується для формування набору векторів, що забезпечують перестроювання матричного фільтра-проектора доти, доки квадратична форма не досягне максимального значення і, якщо максимальне значення квадратичної форми перевищує поріг виявлення, то вектор параметрів, які максимізують квадратичну форму, приймається за оціночний вектор параметрів цілей в імпульсному об'ємі радіолокаційної станції.
2. Спосіб за п. 1, який відрізняється тим, що прийняті приймальною антеною радіолокаційної станції сигнали, на вхід перестроюваного матричного фільтра-проектора, надходять із цифрової лінії затримки.
Текст
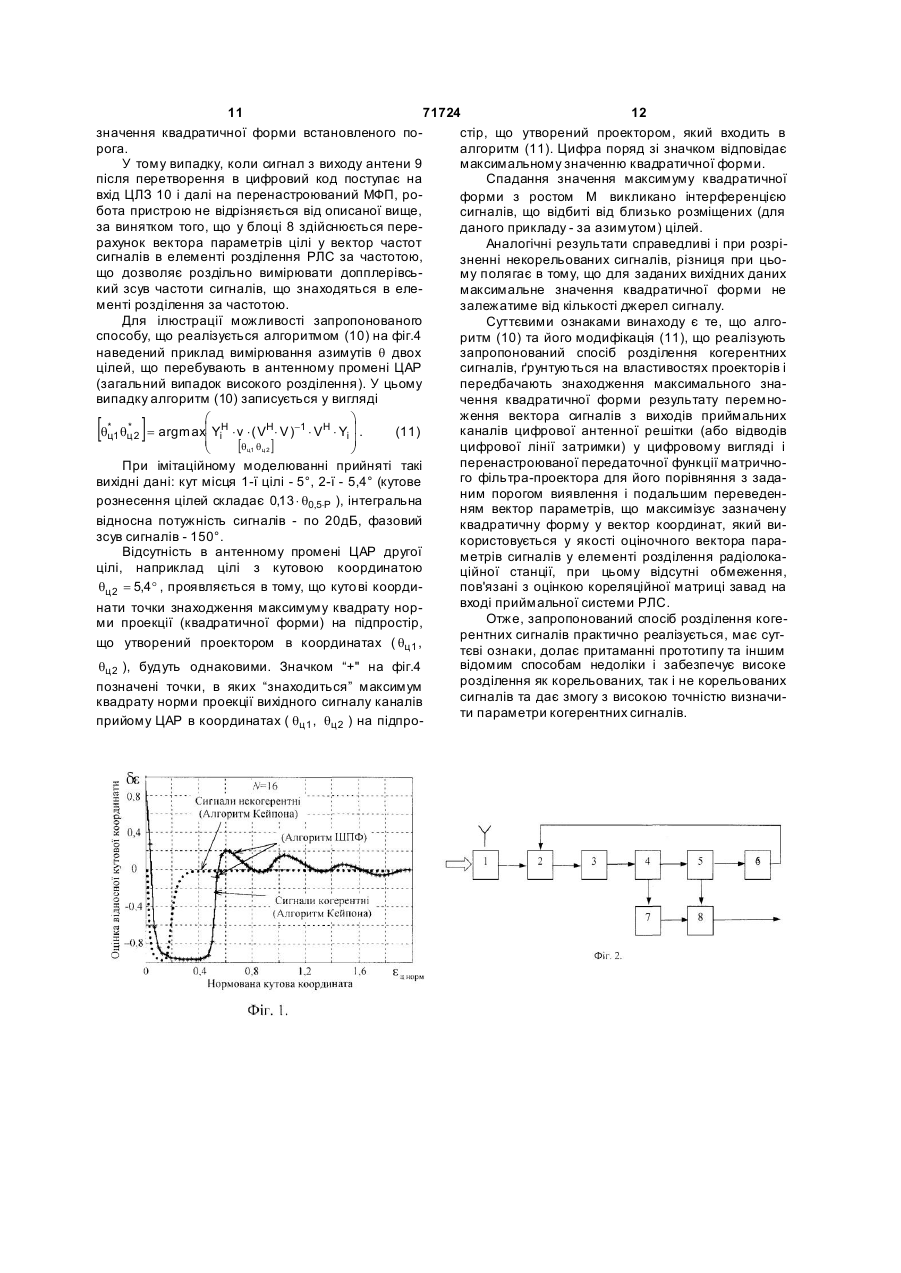
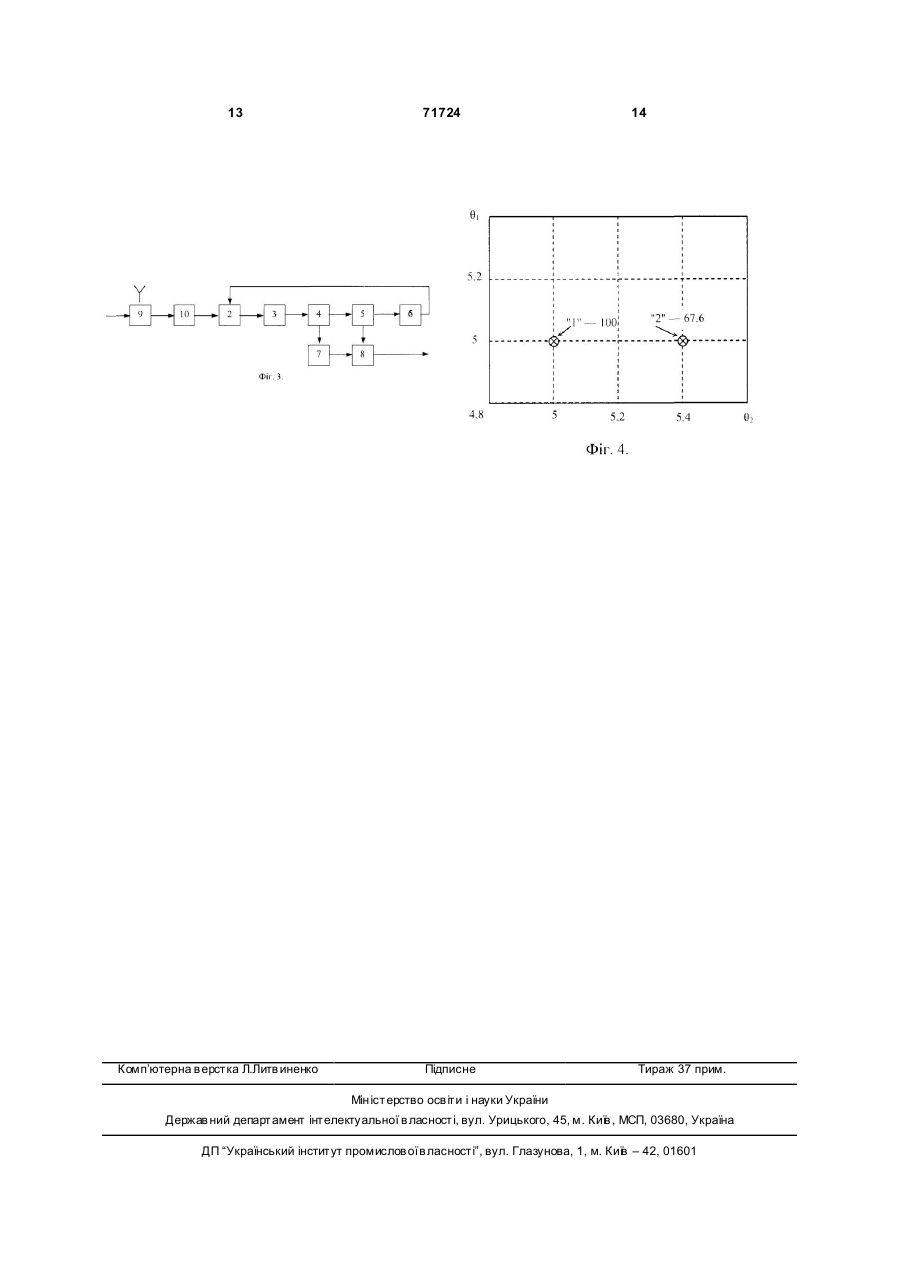
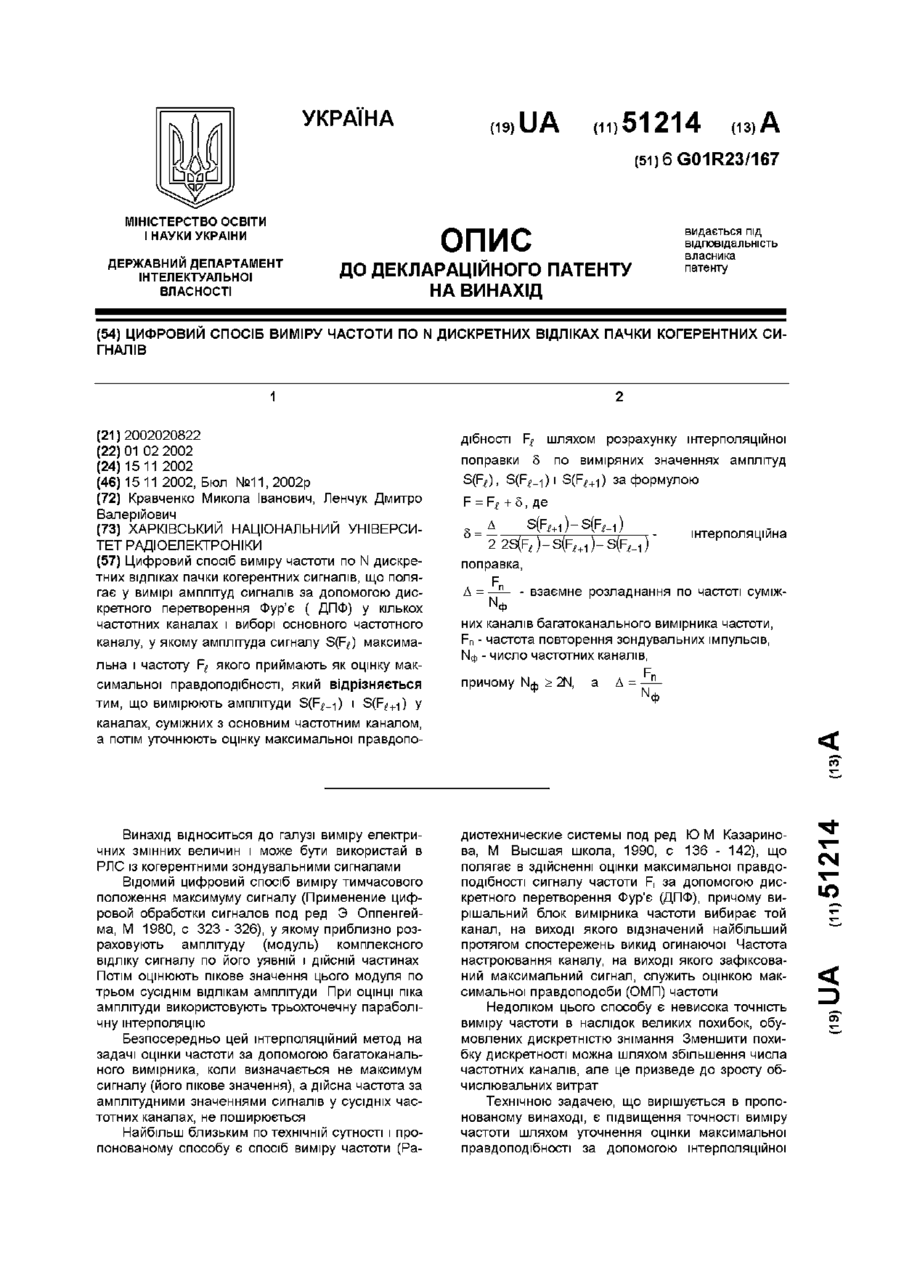
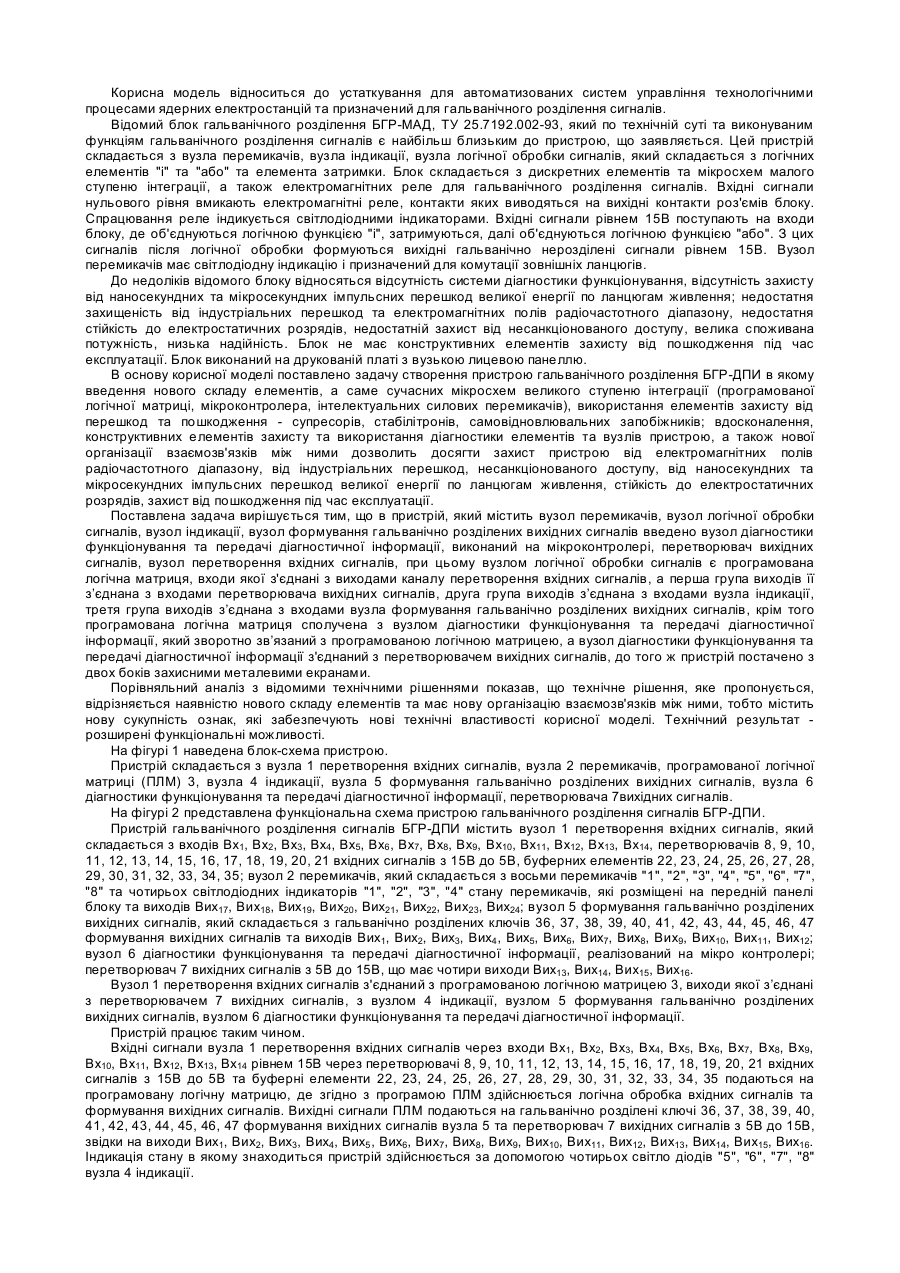
1. Спосіб високого розділення когерентних радіолокаційних сигналів, що включає прийом відбитих від об'єктів си гналів антенною решіткою, перетворення сигналів з виходів приймальних каналів антенної решітки у цифрову форму, обчислення квадратичної форми оціночного вектора на виході неперенастроюваного фільтра-проектора, пошук максимального значення квадратичної форми і вектора параметрів, порівнювання максимального значення квадратичної форми з порогом, який відрізняється тим, що вектор сигналів, представлений у цифровому вигляді, помножуєть 3 71724 му синфазному випромінюванні M перших когерентних сигналів на одній частоті (згодом з затримкою у часі M други х когерентних сигналів на тій самій частоті з взаємним зсувом фаз для формування обертового поля), у одночасному локально направленому когерентному прийомі N перших відбитих від цілей сигналів та їх селекції за швидкістю і далекістю, і наступному підсумовуванні з запам'ятовуванням по кожному з далекісношвидкісних каналів (те саме і для прийнятих N други х відбити х від цілей сигналів), і, наприкінці, у визначенні різниці фаз прийнятих "груп" "перши х" і "други х" сигналів, що дозволяє встановити координати цілі за далекістю і швидкістю. Основним недоліком зазначених способів є втрата їх властивостей в умовах, коли ''відстань" між радіолокаційними об'єктами за будь-якою з координат (азимутом, кутом місця чи частотою Допплера) є меншою за відповідну міру розділення РЛС. В цих обставинах виникає необхідність розв'язання задачі високого розділення. Найближчими до винаходу є способи розділення сигналів за допомогою так званих алгоритмів надрозділення [С.М. Кей. С.Л. Марпл мл. Современные методы спектрального анализа: обзор // ТИИЭР. -1981.- Т.69, №11. -С.37-41, 9-13, Р. Блейхут. Быстрые алгоритмы цифровой обработки сигналов: Пер. с англ. -М.: Мир. 1989. -448с.], наприклад за допомогою алгоритму Кейпона чи максимальної правдоподібності (МП), який передбачає обчислення функції вихідних сигналів цифрової антенної решітки (ЦАР), коли мова йде про просторову фільтрацію сигналів, або відводів цифрової лінії затримки (ЦЛЗ), коли мова йде про допплерівську фільтрацію, вигляду 1 F(q 0 ) = , (1) H v0 × R -1 × v0 Як і всі відомі алгоритми високого розділення алгоритм МП передбачає перехід від вихідних сигналів Yi , приймальних каналів ЦАР або відводів ЦЛЗ до функції j (R ) від кореляційної (тут: обер ( ) неної j R -1 матриці (KM) цих сигналів на виходах приймальних каналів: 1 n R = å Yi × YiH . (2) n i=1 Далі обчислюється проекція певного оціночного вектора v 0 на підпростір, який однозначно по ( ) в'язаний з j R -1 , при цьому параметри вектора v 0 змінюються так, щоб віднайти ті їх значення, за яких відповідним чином сформована функція H = {j(R), v 0 } прийме найбільше значення. В формулах (1) і (2) позначено: q 0 - деякий параметр, що оцінюється, наприклад кутова координата; v 0 - оціночний вектор, для ЦАР містить інформацію про амплітудно-фазовий розподіл (АФР) сигналів від цілі (цілей) на розкритті антени; [ ] vH = 1e- jj e-2 jj ... e- j(N-1)j ; j = p × sinq0 ; q 0 - пе0 редбачувана кутова координата цілі (контрольований напрямок); N - кількість приймальних каналів 4 ЦАР (відводів ЦЛЗ); R - кореляційна матриця (KM) сигналів на вході приймальних каналів ЦАР (відводах ЦЛЗ); n ³ N - об'єм сигнальної вибірки: Yi N - вимірний вектор-стовпчик дискретних вибірок вихідних сигналів ЦАР (ЦЛЗ); (×)H - знак ермітового спряження. У якості прототипу вибраний інший відомий алгоритм - проекційний спосіб високого розділення шумових сигналів MUSIC [С.Л. Марпл мл. Цифровой спектральный анализ и его применение. -М.: Мир. 1990] вигляду 1 F(q 0 ) = , M æ ö (2a) H ç H÷ N - v 0 × å g i × gi × v 0 ç ÷ è i =1 ø де gi - матриця “сигнальних” власних векторів оціночної KM ви гляду (2). Спосіб - прототип включає: 1. прийом радіолокаційних сигналів, відбитих від об'єктів, антеною у вигляді ЦАР; 2. оцінку кореляційної матриці вихідних сигналів антенної решітки; 3. обчислення сигнальних власних векторів KM (див. вираз (2a)); 4. формування неперенастроюваного проектора на основі обчислених сигнальних власних векторів KM; 5. обчислення квадратичної форми для оціночного вектора, параметри якого змінються; 6. порівнювання з заданим порогом величини, оберненої до різниці кількості приймальних елементів ЦАР, і обчисленого значення квадратичної форми. Недоліком прототипу, а також всіх згаданих способів обробки радіолокаційних сигналів, є нездатність забезпечення високого розділення когерентних сигналів, що обмежує область застосування способу-прототипу та інших випадком пасивної радіолокації об'єктів, що випромінюють шумові сигнали. Причиною наявності цього недоліку є невірні допущення при формуванні кореляційної матриці. Так, KM (1) можна представити у вигляді (3) R = I × рш + V × P1 × VH , де I - одинична матриця розміром M´ M ; M кількість цілей в межах міри розділення PЛC; рш - потужність власних шумів приймального каналу; V = [v1 v 2 ...v M] - матриця розміром N´M , стовпчиками якої є N - вимірні вектори, що характеризують амплітудно-фазовий розподіл (АФР) сигналів, що відбиті від цілей, на входа х приймальних елементів ЦАР (відвода х ЦЛЗ); vi ; P1 - діагональна матриця M´ M . Тоді матриця P1 для випадку 2-х некорельованих цілей записується як р 0 Р1 = 1 , (4) 0 р2 Для випадку кореляції сигналів від цілей, що матиме місце, коли дві і більше цілей перебуватимуть в одному імпульсному об'ємі РЛС, або коли 5 71724 6 на вході приймальної системи PЛC буде прямий і тим, що спосіб високого розділення когерентних перевідбитий від земної поверхні сигнали від масигналів за напрямком надходження і за частотою, що включає прийом ЦАР енергії відбитих від об'єкловисотного повітряного об'єкту, матриця P1 петів сигналів і їх перетворення з виходів приймальрестане бути діагональною і прийме вигляд них каналів ЦАР у сигнали в цифровій формі, оцінp1 p1 × p2 × r × e jj ку KM ци х сигналів, обчислення сигнальних P2 = , (5) - jj власних векторів KM і формування на їх основі p1 × p 2 × r × e p2 неперенастроюваного проектора, його перемноде рш - потужність сигналу, що відбитий від ження на оціночний вектор, параметри якого змінються, з обчисленням квадратичної форми (КФ), m - тої цілі ( m = 1, 2) на ви ході приймального капошук максимального значення КФ і його порівнюналу ЦАР (відводу ЦЛЗ); r - коефіцієнт кореляції вання з заданим порогом, встановлення шуканих сигналів, що розділяються (без врахування допппараметрів сигналів на основі значень оціночного лерівського зсуву частот); j - фазовий зсув цих вектора згідно винаходу, передбачає множення сигналів. вектора сигналів на виходах приймальних каналів Для активних РЛС з пасивною відповіддю ЦАР, представлених у цифровому вигляді, на пеr » 1 , тому відмінність матриць (3) і (4) і буде приренастроювану передаточну функцію матричного чиною втрати здатності до високого розділення фільтра-проектора, і результат перемноження відомими алгоритмами в умовах корельованих перетворюється у квадратичну форму, за якою сигналів. визначається максимальне значення квадратичної Зроблений висновок наглядно ілюструється форми і вектор параметрів, при якому квадратична Фіг.1, на якій показано залежності відносного зсуву форма досягає максимального значення, викорисоцінки кута місця цілі від дійсного кута місця цілі товується для формування набору векторів, що (при розділенні прямого і перевідбитого від Землі забезпечують перенастроювання матричного фісигналів в підсистемі просторової обробки сигнальтра-проектора до тих пір, поки квадратична фолів РЛС з ЦАР). Суцільна лінія показує ефективрма не досягне максимального значення і, якщо ність алгоритму високого розділення Кейпона, а максимальне значення квадратичної форми перезначок “*” - звичайного ДПФ. Графіки відповідають вищує поріг виявлення, то вектор параметрів, що таким вихідним даним: ЦАР орієнтована для вимімаксимізує квадратичну форму, перераховується у рювання кута місця цілі, N = 16 , кількість сигнальвектор координат, який використовується у якості них вибірок n для оцінки KM прямує до нескінчеоціночного вектора параметрів сигналів у елементі ності ( n ® ¥ ); інтегральне відношення сигнал/шум розділення радіолокаційної станції. для ЦАР - 20дБ; відстань між приймальними елеРозв'язання задачі досягається також і тим, ментами ЦАР дорівнює довжині робочої хвилі що прийняті приймальною антеною РЛС сигнали на вхід перенастроюваного фільтра-проектора, РЛС. Відносний зсув оцінки кута місця de цілі для поступають з цифрової лінії затримки. * e -e Причинно-наслідковий зв'язок між технічним рисунків визначено як de = ц ц , де e * - оцінка ц eц рішенням, що заявляється, і технічним результатом, що досягається. кута місця цілі, що знайдена по вихідному сигналу ЦАР забезпечує перетворення енергії електз ЦАР при наявності на прямого і перевідбитого ромагнітного поля, що створюється виявленим від Землі сигналів цілі; e ц - справжнє значення об'єктом, в енергію радіосигналів. Вона відрізнякута місця цілі. Нормований кут місця цілі визнається від звичайної добре відомої АР лише наявніeц стю перетворювача аналог-код на виході кожного з чено як e ц норм = (тут e 0,5×Р - ширина діагприймальних каналів решітки. e 0,5×Р Матричним фільтр-проектором (МФП) є прирами напрямленості ЦАР в к утомісній площині). стрій з N входами (приймальних каналів ЦАР чи З Фіг.1 видно, що вимірювання кутів місця, відводів ЦЛЗ) і N ви ходами, передаточна функція менших за ширину діаграми напрямленості ЦАР в якого визначається матрицею вигляду кутомісній площині, за допомогою алгоритму Кей-1 пона для розділення прямого і перевідбитого від (6) Prn = V × VH × V × VH , Землі сигналів цілі, які є корельованими, практично неможливе. Висновок справедливий і для решде V = [v1 v 2... v n ] - матриця розміром N´ n ; vi ти алгоритмів високого розділення, зокрема і для - N - вимірний вектор-стовпчик, що описує передспособу-прототипу. бачуваний фазовий розподіл, що створюється Технічними результатами винаходу є е фектисигналом і - го об'єкту в приймальних елементах вне розділення як корельованих, так і некорельоЦАР, коли ведемо мову про розділення за напрямваних сигналів в радіолокації, що досягається розком надходження сигналів, або на відводах ЦЛЗ, в'язуваною задачею щодо удосконалення способуколи мова про розділення сигналів за частотою; n прототипу, при чому його реалізація виключає по- кількість цілей в елементі розділення РЛС за натребу оцінювання KM вихідних сигналів приймальпрямком надходження сигналів або за частотою: них каналів ЦАР, коли мова йде про просторову k - тий елемент вектора vi дорівнює: фільтрацію сигналів, або відведень ЦЛЗ, коли мова - про допплерівську фільтрацію, а також щезаv(k) - exp[j × (k - 1)× ji ] ; ji - передбачуваний параi ють пов'язані з оцінкою KM сигналів обмеження, метр об'єкту, що у випадку розділення за напрямзокрема на необхідну кількість дискретних сигнаком надходження сигналів визначається виразом льних вибірок. Розв'язання задачі досягається і ( ) ( ) 7 71724 8 чений параметрів цілей в елементі розділення 2× p ji = × d × (k - 1)× sin qi , а у випадку розділення за РЛС; l r j = [j1 j2 ... jn ] - вектор очікуваних значень пачастотою - ji = 2 × p × FD i × Tn , l - довжина хвилі раметрів об'єктів в елементі розділення РЛС; РЛС; d - відстань між приймальними елементами Y - N - вимірний вектор-стовпчик вихідних сиЦАР; qi - передбачувана кутова координата (азигналів приймальних каналів ЦАР або відводів ЦЛЗ. мут або кут місця) і - го об'єкту в імпульсному об'Винахід пояснюється: Фіг.2 - функціональна схема пристрою, що реалізує спосіб високого розємі РЛС; Т n - період повторення зондуючих імпуділення когерентних сигналів за напрямком їх надльсів РЛС; FD i - передбачуваний допплерівський ходження і дозволяє роздільно визначати кутові координати цілей, які знаходяться в імпульсному зсув частоти сигналу, відбитого від і - го об'єкта в об'ємі РЛС. елементі розділення РЛС за частотою. Фіг.3 - функціональна схема пристрою, що реМФП називається перенастроюваним, якщо в алізує спосіб високого розділення когерентних (1) має місце можливість зміни передбачуваних сигналів за частотою і дозволяє роздільно визнапараметрів об'єктів ji . Використовуючи записані чати допплерівські зсуви частот сигналів в елемевище формули для ji , вектор параметрів нті розділення за частотою. r Пристрій, що реалізує спосіб високого роздіj = [j1 j2 ... jn ] можна перерахувати у відповідні лення когерентних сигналів за напрямком їх надкоординати об'єкта (азимут або кут місця, допплеходження і за їх частотою включає такі елементи: рівський зсув частоти) таким чином: 1. Антенну систему 1 РЛС у вигляді ЦАР, приæ j ×l ö ji значену для перетворення енергії матеріального qi = arcsinç i ÷ ; FDi = . 2p × Tn об'єкту "електромагнітне поле", відбитого від виè 2p × d ø явлених цілей, в енергію електричних сигналів Матриця за виразом (1) формує підпростір, що (відбитих сигналів) на входах приймальних каналів натягнутий на стовпчики матриці V , і має ряд віантенної решітки [Антенные решетки: Обзор зарудомих властивостей [Воєводин В.В., Кузнецов бежных работ по методам расчета и пС.7]. Ю.А. Матрицы и вычисления. -М.: Наука, 1984. 2. Перенастроюваний матричний фільтр318с.], які і покладені в основу заявлюваного спопроектор 2, призначений для формування підпрособу високого розділення когерентних сигналів стору очікуваних фазових розподілів, обумовлених перша властивість: сигналами цілей, що знаходяться в імпульсному (7) Pr× Pr = Pr ; об'ємі РЛС, в приймальних елементах ЦАР (або на друга властивість: r r r відводах ЦЛЗ), і який являє собою процесор, що Pr× vi = v i , при vi Î V (8) забезпечує можливість формування матриці проеПри ji = jцi (тут jцi - параметр і - го об'єкта в імпульсному об'ємі РЛС) з врахуванням (2) і (3) має місце очевидне співвідношення: n A = Pr × å v i × si i =1 2 n n i=1 i=1 = å v i × s i × Pr × å v i × si = n 2 å vi × si , (9) i=1 де подвійна лінія означає норму вектора [там же]; si - сигнал і - тої цілі на виході опорного (наприклад, першого) приймального тракту цифрової антенної решітки. Квадрат норми сигналу - це еквівалент потужності (енергії) сигналу [А.М. Трахтман. Введение в обобщенную теорию сигналов. -М.: Сов. радио, 1972. -С.94], тому ясно, що при ji = jцi квадратична форма, яка визначається виразом (4), має максимальне значення (енергія сумарного сигналу на виході МФП завдяки властивості (3) не може бути більше за сумарну енергію сигналів на його вході). Якщо z ³ zпор , то в якості вектору (набору) оціночних значень параметрів об'єктів в елементі r розділення РЛС j * вибирається вектор (набір) значень ji , при якому квадратична форма приймає максимальне значення, тобто æ ö ç ÷ r ç YH × P rn × Y ÷ , j* = arg max (10) ç ÷ j ç ÷ è ø r де j* = [j *1 j *2 ... j *n ] - вектор оціночних зна ктора. 3. Обчислювач 3 квадратичної форми (квадрата норми) для сигналів на виході МФП, який являє собою спеціалізований процесор, що забезпечує можливість обчислення добутку матриці на вектор і обчислення квадрату норми вектора. 4. Блок 4 пошуку максимального значення квадратичної форми, який являє собою мікропроцесор, що забезпечує розв'язання задачі пошуку безумовного екстремуму одним з численних методів [Пантелеев А.В., Ле това Т.А. Ме тоды оптимизации в примерах и задачах -М.: Высшая школа, 2002. 544с.]. 5. Блок 5 пошуку вектора параметрів [j1 j 2 ... jn ] фільтра-проектора, при якому максимізується значення квадратичної форми. 6. Блок-формувач 6 векторів [v1 v 2 ... vn ] , які призначені для формування передаточної функції перенастроюваного МФП. 7. Блок 7 порівнювання значення максимуму квадратичної форми з порогом, що забезпечує прийняття рішення про наявність цілей в елементі розділення РЛС і оцінку їх координат [Ширман Я.Д. Теоретические основы радиолокации -М.: Сов. радио, 1974. -С.]. В якості блока порівнювання може використовуватися компаратор. 8. Блок 8 перерахунку вектора параметрів цілей у вектор відповідних координат цілей і видачі інформації про координати цілей в імпульсному об'ємі РЛС споживачу. Він являє собою спеціалі 9 71724 10 зований процесор. нті розділення РЛС за частотою; Причому, цифрова антенна решітка 1 з'єднана Tn - період повторення зондуючих імпульсів з перенастроюваним матричним фільтромРЛС; проектором 2, МФП 2 з'єднаний з обчислювачем (×)H - знак ермітового спряження. квадратичної форми 3, обчислювач квадратичної форми 3 з'єднаний з блоком 4 пошуку максималь3. Помноження сформованої характеристики ного значення квадратичної форми та блоком 5 МФП на вектор-стовпчик Y вихідних сигналів ЦАР пошуку вектора параметрів, блок 4 пошуку макси(при просторовій фільтрацій сигналів) чи ЦЛЗ (при мального значення квадратичної форми з'єднаний допплерівській фільтрації сигналів) з блоком 7 порівнювання з порогом і з блоком 5 Prn× Y . пошуку вектора параметрів, а блок 5 пошуку век4. Обчислення квадратичної форми (квадрата торів параметрів зв'язаний з входами формувача 6 норми вихідного сигналу фільтра-проектора) векторів і з інформаційним входом блока перерахунку 8, формувач 6 векторів з'єднаний з перенасz = Y H × Prn × Y троюваним МФП 2, вихід блока 7 порівнювання з 5. Максимізація значення квадратичної форми порогом зв'язаний з управляючим блоком перераза рахунок зміни вектора параметрів МФП. хунку 8. YH × Prn × Y ® max , r У випадку одноканальної антени 9 РЛС вихідj ний сигнал антени після його перетворення у цифr де j = [j1 j2 ... jn ] - вектор очікуваних значень ровий код поступає на вхід ЦЛЗ 10 і далі поступає параметрів. на перенастроюваний фільтр-проектор. 6. Порівнювання максимального значення Причому, ви хід антени 9 РЛС з'єднаний з входом цифрової лінії затримки 10, а її виходи з'єднаквадратичної форми zmax з порогом виявлення ні з входами перенастроюваного МФП. zпор і перерахунок вектора параметрів, при яких Заявлюваний спосіб включає наступну послізначення квадратичної форми досягає максимадовність дій над матеріальним об'єктом "електрольного значення за умови перевищення ним поромагнітне поле". 1. Перетворення енергії електромагнітного погу zпор . ля, яке створюється спостерігаємими об'єктами, в r j * = arg m ax z , якщо zmax ³ zпор , енергію радіосигналів на входах приймальних каналів РЛС. Перетворення здійснюється антенною де j* = [j *1 j *2 ... j *n ] - вектор оціночних знасистемою, реалізованою у вигляді ЦАР. чень параметрів. 2. Формування передаточної характеристики Пристрій, що реалізує спосіб високого роздіматричного фільтра на основі очікуваних фазових лення, працює таким чином. розподілів корисних сигналів у приймальних елеСтворювані об'єктами електромагнітні поля ментах ЦАР: перетворюються у приймальних елементах ЦАР в -1 електричні сигнали. Після підсилення і перетвоPrn = V × VH × V × VH , рення у цифровий код ці сигнали поступають на де n - кількість цілей в імпульсному об'ємі входи матричного фільтра-проектора, в якому РЛС; V = [v1 v 2... v n ] - матриця розміром N´ n ; здійснюється помноження його передаточної функції на вектор вихідних сигналів цифрової антенної vi - N - вимірний вектор-стовпчик, що описує решітки. передбачуваний фазовий розподіл, що створюєтьЗ ви ходу МФП сигнали поступають на обчисся сигналом і - го об'єкту в приймальних елеменлювач квадратичної форми (ОКФ), де вираховутах ЦАР, коли ведемо мову про розділення за нається квадратична форма для вихідного сигналу прямком надходження сигналів, або на відводах фільтра-проектора. ЦЛЗ, коли мова про розділення сигналів за частоЗ виходу ОКФ сигнал поступає у блок пошуку тою; k - тий елемент вектора vi дорівнює: параметрів МФП і в блок пошуку максимального значення квадратичної форми, в яких втілюється j v(k) = exp[j × (k - 1)× ji ] ; i - передбачуваний парарішення задачі пошуку безумовного екстремуму. i З виходу блока пошуку максимального знаметр і - го об'єкту, що у випадку розділення за чення квадратичної форми сигнал поступає на напрямком надходження сигналів визначається блок порівнювання з порогом. Блоки 4 і 5 забезпе2× p чують численний розв'язок задачі пошуку безумовиразом ji = × d × (k - 1)× sin qi , a y випадку розl вного екстремуму і являє собою спеціалізований ділення за частотою - ji = 2 × p × FD i × Tn ; процесор. З виходу блока пошуку вектора параметрів l - довжина хвилі РЛС; значення параметрів a i , при яких максимізується d - відстань між приймальними елементами квадратична форма, поступають на формувач ЦАР; векторів Vi , які забезпечують перестроювання qi - передбачувана кутова координата (азимут МФП і, якщо максимальне значення квадратичної або кут місця) і - го об'єкту в імпульсному об'ємі форми перевищує поріг виявлення, використовуРЛС; ються в якості оціночних значень вимірюваних FD i - передбачуваний допплерівський зсув чакоординат цілей в імпульсному об'ємі радіолокастоти сигналу, відбитого від і - го об'єкта в елемеційної станції при перевищенні максимального ( ) 11 71724 12 значення квадратичної форми встановленого постір, що утворений проектором, який входить в рога. алгоритм (11). Цифра поряд зі значком відповідає У тому випадку, коли сигнал з виходу антени 9 максимальному значенню квадратичної форми. після перетворення в цифровий код поступає на Спадання значення максимуму квадратичної вхід ЦЛЗ 10 і далі на перенастроюваний МФП, роформи з ростом М викликано інтерференцією бота пристрою не відрізняється від описаної вище, сигналів, що відбиті від близько розміщених (для за винятком того, що у блоці 8 здійснюється переданого прикладу - за азимутом) цілей. рахунок вектора параметрів цілі у вектор частот Аналогічні результати справедливі і при розрісигналів в елементі розділення РЛС за частотою, зненні некорельованих сигналів, різниця при цьощо дозволяє роздільно вимірювати допплерівсьму полягає в тому, що для заданих вихідних даних кий зсув частоти сигналів, що знаходяться в елемаксимальне значення квадратичної форми не менті розділення за частотою. залежатиме від кількості джерел сигналу. Для ілюстрації можливості запропонованого Суттєвими ознаками винаходу є те, що алгоспособу, що реалізується алгоритмом (10) на фіг.4 ритм (10) та його модифікація (11), що реалізують наведений приклад вимірювання азимутів q двох запропонований спосіб розділення когерентних цілей, що перебувають в антенному промені ЦАР сигналів, ґрунтуються на властивостях проекторів і (загальний випадок високого розділення). У цьому передбачають знаходження максимального знавипадку алгоритм (10) записується у вигляді чення квадратичної форми результату перемноження вектора сигналів з виходів приймальних æ ö * каналів цифрової антенної решітки (або відводів q* 1 qц 2 = arg maxç YiH × v × ( VH× V )-1 × VH × Yi ÷ . (11) ц ç ÷ [qц1 qц 2 ] цифрової лінії затримки) у цифровому вигляді і è ø перенастроюваної передаточної функції матричноПри імітаційному моделюванні прийняті такі го фільтра-проектора для його порівняння з задавихідні дані: кут місця 1-ї цілі - 5°, 2-ї - 5,4° (кутове ним порогом виявлення і подальшим переведенрознесення цілей складає 0,13 × q0,5×P ), інтегральна ням вектор параметрів, що максимізує зазначену відносна потужність сигналів - по 20дБ, фазовий квадратичну форму у вектор координат, який визсув сигналів - 150°. користовується у якості оціночного вектора параВідсутність в антенному промені ЦАР другої метрів сигналів у елементі розділення радіолокацілі, наприклад цілі з кутовою координатою ційної станції, при цьому відсутні обмеження, qц 2 = 5,4 ° , проявляється в тому, що куто ві коордипов'язані з оцінкою кореляційної матриці завад на вході приймальної системи РЛС. нати точки знаходження максимуму квадрату норОтже, запропонований спосіб розділення когеми проекції (квадратичної форми) на підпростір, рентних сигналів практично реалізується, має сутщо утворений проектором в координатах ( qц 1 , тєві ознаки, долає притаманні прототипу та іншим відомим способам недоліки і забезпечує високе qц 2 ), будуть однаковими. Значком “+" на фіг.4 розділення як корельованих, так і не корельованих позначені точки, в яких “знаходиться” максимум сигналів та дає змогу з високою точністю визначиквадрату норми проекції вихідного сигналу каналів ти параметри когерентних сигналів. прийому ЦАР в координатах ( qц 1 , qц 2 ) на підпро [ ] 13 Комп’ютерна в ерстка Л.Литв иненко 71724 Підписне 14 Тираж 37 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for separating coherent signals with high resolution
Назва патенту російськоюСпособ разделения когерентных сигналов с высокой разрешающей способностью
МПК / Мітки
МПК: G01S 13/00
Мітки: сигналів, спосіб, розділення, когерентних, високого
Код посилання
<a href="https://ua.patents.su/7-71724-sposib-visokogo-rozdilennya-kogerentnikh-signaliv.html" target="_blank" rel="follow" title="База патентів України">Спосіб високого розділення когерентних сигналів</a>
Цифровий спосіб виміру частоти по n дискретних відліках пачки когерентних сигналів
Номер патенту: 51214
Опубліковано: 15.11.2002
Автори: Ленчук Дмитро Валерійович, Кравченко Микола Іванович
МПК: G01R 23/16
Мітки: сигналів, частоти, пачки, спосіб, цифровий, виміру, дискретних, когерентних, відліках
Формула / Реферат:
Цифровий спосіб виміру частоти по N дискретних відліках пачки когерентних сигналів, що полягає у вимірі амплітуд сигналів за допомогою дискретного перетворення Фур’є ( ДПФ) у кількох частотних каналах і виборі основного частотного каналу, у якому амплітуда сигналу максимальна і частоту якого приймають як...
Пристрій гальванічного розділення сигналів бгр-дпи
Номер патенту: 2028
Опубліковано: 15.09.2003
Автор: Бахмач Євген Степанович
МПК: G05B 19/00
Мітки: сигналів, гальванічного, пристрій, розділення, бгр-дпи
Формула / Реферат:
Пристрій гальванічного розділення сигналів, який містить вузол перемикачів, вузол логічної обробки сигналів, вузол індикації, вузол формування гальванічно розділених вихідних сигналів, який відрізняється тим, що в нього введено вузол діагностики функціонування та передачі діагностичної інформації, виконаний на мікроконтролері, перетворювач вихідних сигналів, вузол перетворення вхідних сигналів, при цьому вузлом логічної обробки сигналів є...
Спосіб надрелеївського розрізнення сигналів
Номер патенту: 56921
Опубліковано: 15.05.2003
Автори: Тітов Ігор Володимирович, Слюсар Вадим Іванович, Сащук Ігор Миколайович
МПК: G01S 13/87, G01S 13/74, G01S 13/06, G01S 13/02, G01S 13/00, G01S 13/48, G01S 13/86
Мітки: спосіб, сигналів, розрізнення, надрелеївського
Формула / Реферат:
1. Спосіб надрелеївського розділення сигналів, який для N-канальної лінійної антенної решітки полягає в тому, що над прийнятими сигналами в кожному з N каналів виконують операцію аналого-цифрового перетворення, за отриманими цифровими відліками напруг сигналів формують вирішувальну функцію за виразом:,де:
Спосіб розділення канальних сигналів
Номер патенту: 25189
Опубліковано: 30.10.1998
Автор: Іваницький Анатолій Мечиславович
МПК: H03H 7/01, H03H 11/04
Мітки: канальних, сигналів, розділення, спосіб
Формула / Реферат:
Способ разделения канальных сигналов, заключающийся втом, что два радиоимпульса, каждый из которых имеет напряжение видаподают на два колебательных контура с резонансными частотами wok = w1, k = 1, 2, отличающийся тем, что добротность k-го колебательного контура Qk, k = 1, 2 делают равной w1/2sk.
Пристрій розділення сигналів яскравості та колірності у декодері системи секам
Номер патенту: 18743
Опубліковано: 25.12.1997
Автори: Медведєв Юрій Андрійович, Шишкін Олександр Володимирович, Бабич Володимир Васильйович, Матвєєв Олександр Олександрович, Дідич Юрій Романович, Солоп Микола Опанасович, Крюкова Тетяна Дмитрівна, Гофайзен Олег Вікторович, Басій Валерій Тимофійович, Платзерова Наталія Олександрівна
МПК: H04N 9/78
Мітки: пристрій, розділення, декодері, яскравості, колірності, системі, сигналів, секам
Формула / Реферат:
(57) Устройство разделения сигналов яркости и цветности в декодере системы СЕКАМ, содержащее последовательно соединенные первый блок задержки и вычитатель, блок коррекции высокочастотных предыскажений (К8ЧП), вход которого соединен с входом первого блока задержки, блок высокочастотных предыскажений (ВЧП), выход которого соединен со вторым входом вычитателя, и первый фазовый детектор, о т личающееся тем, что введены блок...
Попередній патент: Кутовий з’єднувач
Наступний патент: Спосіб отримання гідролізованого поліакрилонітрилу
Випадковий патент: Стійкі тверді склади сертиндолу