Спосіб для розпізнавання перешкодних дугових розрядів, пристрій для його здійснення і захисний вимикач
Номер патенту: 72974
Опубліковано: 16.05.2005
Автори: Штеффен Петер, Вілсон Хо, Кьолер Штефан, Меклер Петер
Формула / Реферат
1. Спосіб розпізнавання перешкодних дугових розрядів (Arc Tracking) в кабелі (1), зокрема в кабелі бортової мережі літального апарата, згідно з яким зареєстрований сигнал (![]() ) змінного струму дискретизують у часі і з використанням отриманого при цьому дискретного струмового сигналу (
) змінного струму дискретизують у часі і з використанням отриманого при цьому дискретного струмового сигналу (![]() ) шляхом інтерполяції певної кількості вибіркових значень (
) шляхом інтерполяції певної кількості вибіркових значень (![]() ) визначають кутову функцію (
) визначають кутову функцію (![]() ), яка відтворює форму сигналу змінного струму і за якою визначають поточне значення частоти (
), яка відтворює форму сигналу змінного струму і за якою визначають поточне значення частоти (![]() ) змінного струму, а за результатом порівняння поточного значення частоти (
) змінного струму, а за результатом порівняння поточного значення частоти (![]() ) змінного струму із заданим значенням (
) змінного струму із заданим значенням (![]() /) частоти роблять висновок про наявність дугового розряду.
/) частоти роблять висновок про наявність дугового розряду.
2. Спосіб за п. 1, згідно з яким для отримання поточного значення частоти (![]() ) змінного струму із певної кількості вибіркових значень (
) змінного струму із певної кількості вибіркових значень (![]() ) використовують лише вибіркове значення (
) використовують лише вибіркове значення (![]() ), що репрезентує максимальне значення сигналу, а також розміщене в часі до максимального значення (ліве) вибіркове значення (
), що репрезентує максимальне значення сигналу, а також розміщене в часі до максимального значення (ліве) вибіркове значення (![]() ) і розміщене в часі після максимального значення (праве) вибіркове значення (
) і розміщене в часі після максимального значення (праве) вибіркове значення (![]() ).
).
3. Спосіб за п. 2, згідно з яким лівому вибірковому значенню (![]() ) і правому вибірковому значенню (
) і правому вибірковому значенню (![]() ) ставлять у відповідність однакові
) ставлять у відповідність однакові ![]() (
(![]() ).
).
4. Спосіб за п. 2 або 3, згідно з яким попередньо задають порогове значення (![]() ), яке присвоюють як y-значення перетинаючому його у напрямку збільшення вибірковому значенню (
), яке присвоюють як y-значення перетинаючому його у напрямку збільшення вибірковому значенню (![]() ) і перетинаючому його у напрямку зменшення вибірковому значенню (
) і перетинаючому його у напрямку зменшення вибірковому значенню (![]() ).
).
5. Спосіб за будь-яким із пунктів 1-3, згідно з яким поточне значення частоти (![]() ) змінного струму визначають за алгоритмом відповідно до виразу:
) змінного струму визначають за алгоритмом відповідно до виразу:
![]() ,
,
де
![]()
причому 1/T є тактовою частотою, а ![]() ,
, ![]() ,
, ![]() є тактами (
є тактами (![]() ) вибіркових значень (
) вибіркових значень (![]() ), поставленими у відповідність значенням амплітуди
), поставленими у відповідність значенням амплітуди ![]() ,
, ![]() і
і ![]() .
.
6. Спосіб за будь-яким із пунктів 1-5, згідно з яким у (першому) кроці (102) обробки утворюють модуль дискретного струмового сигналу (![]() ).
).
7. Спосіб за будь-яким із пунктів 1-6, згідно з яким дискретний струмовий сигнал (![]() ) у кроці (201) обробки обмежують стосовно кількості вибіркових значень (
) у кроці (201) обробки обмежують стосовно кількості вибіркових значень (![]() ), а у (першому) кроці (202) обробки утворюють модуль обмеженого дискретного струмового сигналу (
), а у (першому) кроці (202) обробки утворюють модуль обмеженого дискретного струмового сигналу (![]() ).
).
8. Спосіб за будь-яким із пунктів 1-7, згідно з яким у (другому) кроці (103, 203) обробки попередньо оброблений шляхом утворення модуля дискретний струмовий сигнал (![]() ) і/або обмежений в кількості вибіркових значень (
) і/або обмежений в кількості вибіркових значень (![]() ) і попередньо оброблений шляхом утворення модуля дискретний струмовий сигнал (
) і попередньо оброблений шляхом утворення модуля дискретний струмовий сигнал (![]() ) піддають подальшій обробці шляхом цифрового фільтрування згідно з операцією згортки:
) піддають подальшій обробці шляхом цифрового фільтрування згідно з операцією згортки:
причому N є шириною смуги пропускання цифрового фільтра, a ![]() - результуючий імпульсний відгук, і причому
- результуючий імпульсний відгук, і причому ![]() для значень
для значень ![]() від
від ![]() до
до ![]() , інакше
, інакше ![]() .
.
9. Спосіб за будь-яким із пунктів 7 і 8, згідно з яким з використанням отриманого в результаті порівняння частот сигналу стану (![]() ) і отриманого з обмеженого дискретного струмового сигналу (
) і отриманого з обмеженого дискретного струмового сигналу (![]() ) вихідного струмового сигналу (
) вихідного струмового сигналу (![]() ) оцінюють окремі перешкодні сигнали (
) оцінюють окремі перешкодні сигнали (![]() ) і групові перешкодні сигнали (
) і групові перешкодні сигнали (![]() ) з точки зору їх утворення внаслідок дугового розряду.
) з точки зору їх утворення внаслідок дугового розряду.
10. Спосіб за будь-яким із пунктів 1-9, згідно з яким сформований в разі виявлення перешкодного дугового розряду сповіщувальний сигнал (![]() ) використовують для спрацьовування захисного вимикача (7), який від'єднує навантаження (13) від кабелю (1).
) використовують для спрацьовування захисного вимикача (7), який від'єднує навантаження (13) від кабелю (1).
11. Спосіб за будь-яким із пунктів 1-10, згідно з яким груповий дуговий сигнал (![]() ) відрізняють від викликаного перемикальними процесами перешкодного сигналу (
) відрізняють від викликаного перемикальними процесами перешкодного сигналу (![]() ) за спадним характером останнього.
) за спадним характером останнього.
12. Пристрій для розпізнавання перешкодних дугових розрядів (Arc Tracking) в кабелі (1), зокрема в кабелі бортової мережі літального апарата, який містить датчик (3) струму для реєстрації сигналу (![]() ) змінного струму в кабелі (1), аналого-цифровий перетворювач (4), який із аналогового сигналу (
) змінного струму в кабелі (1), аналого-цифровий перетворювач (4), який із аналогового сигналу (![]() ) змінного струму формує певну кількість дискретизованих в часі вибіркових значень (
) змінного струму формує певну кількість дискретизованих в часі вибіркових значень (![]() ), а також функціональний вузол (8), виконаний з можливістю визначення поточного значення частоти (
), а також функціональний вузол (8), виконаний з можливістю визначення поточного значення частоти (![]() ) змінного струму шляхом оцінки вибраних вибіркових значень (
) змінного струму шляхом оцінки вибраних вибіркових значень (![]() ) за певним алгоритмом, і формування сповіщувального сигналу (
) за певним алгоритмом, і формування сповіщувального сигналу (![]() ) в разі відхилення поточного значення частоти (
) в разі відхилення поточного значення частоти (![]() ) від заданого значення частоти (
) від заданого значення частоти (![]() /).
/).
13. Пристрій за п. 12, в якому функціональний вузол (8) виконаний у вигляді спеціалізованої інтегральної мікросхеми ASIC (Application Specific Integrated Circuit).
14. Пристрій за п. 12 або 13, в якому датчик (3) струму, аналого-цифровий перетворювач (4) і функціональний вузол (8) інтегровані в захисному вимикачі (7), виконавчий елемент (11) якого виконаний з можливістю розривання з'єднання між вхідним виводом (![]() ) для проводу (2) живлення кабелю (1) і вихідним виводом (
) для проводу (2) живлення кабелю (1) і вихідним виводом (![]() ) для навантаження (13) в разі отримання сповіщувального сигналу (
) для навантаження (13) в разі отримання сповіщувального сигналу (![]() ).
).
15. Пристрій за п. 14, в якому з'єднаний по входу зі вхідним виводом (![]() ) блок (9) живлення по виходу з'єднаний з функціональним вузлом (8) і з датчиком (3) струму.
) блок (9) живлення по виходу з'єднаний з функціональним вузлом (8) і з датчиком (3) струму.
16. Захисний вимикач, зокрема для бортової мережі літального апарата, який містить пристрій за п. 12 або 13 для розпізнавання і вимикання перешкодних дугових розрядів, що виникають в кабелі (1).
Текст
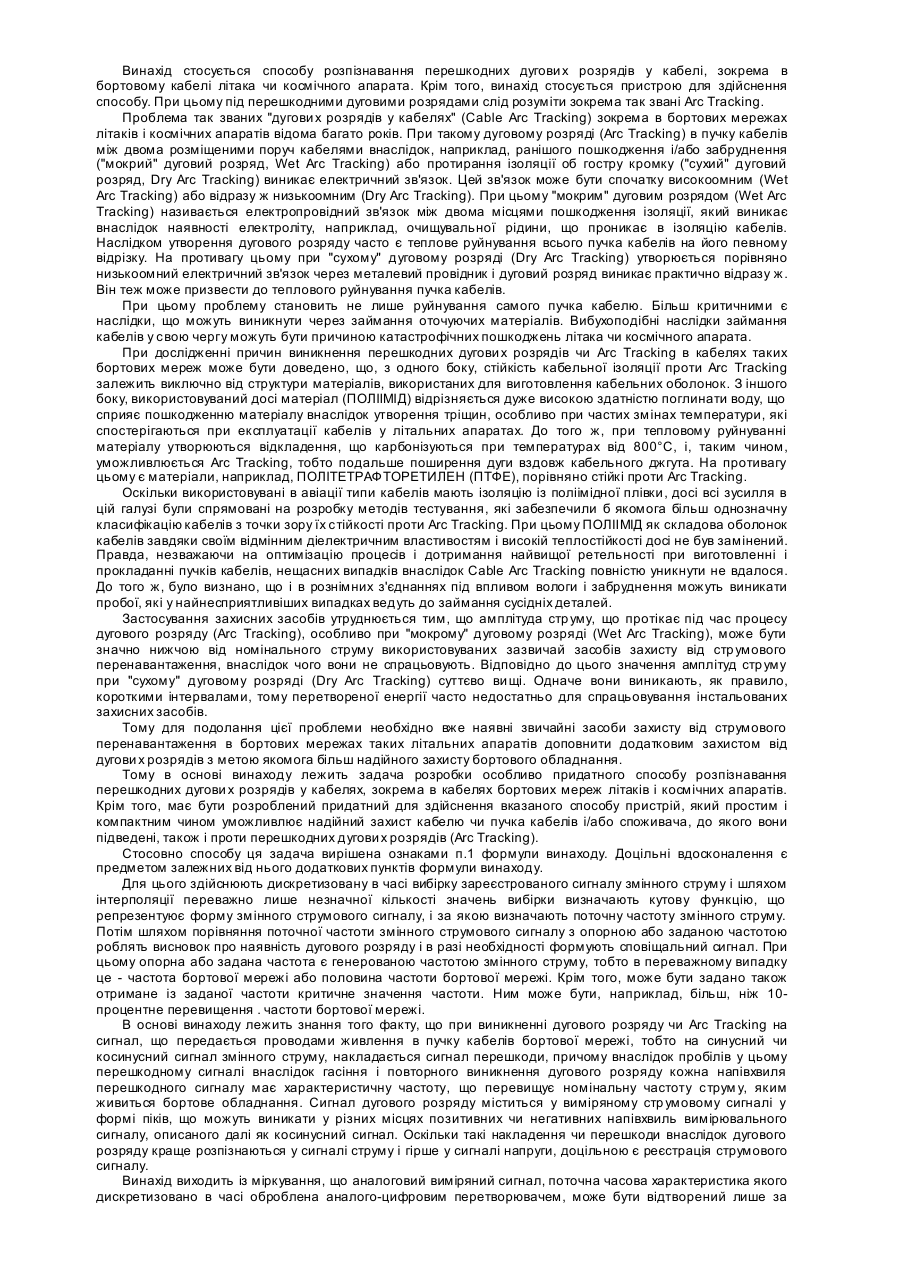
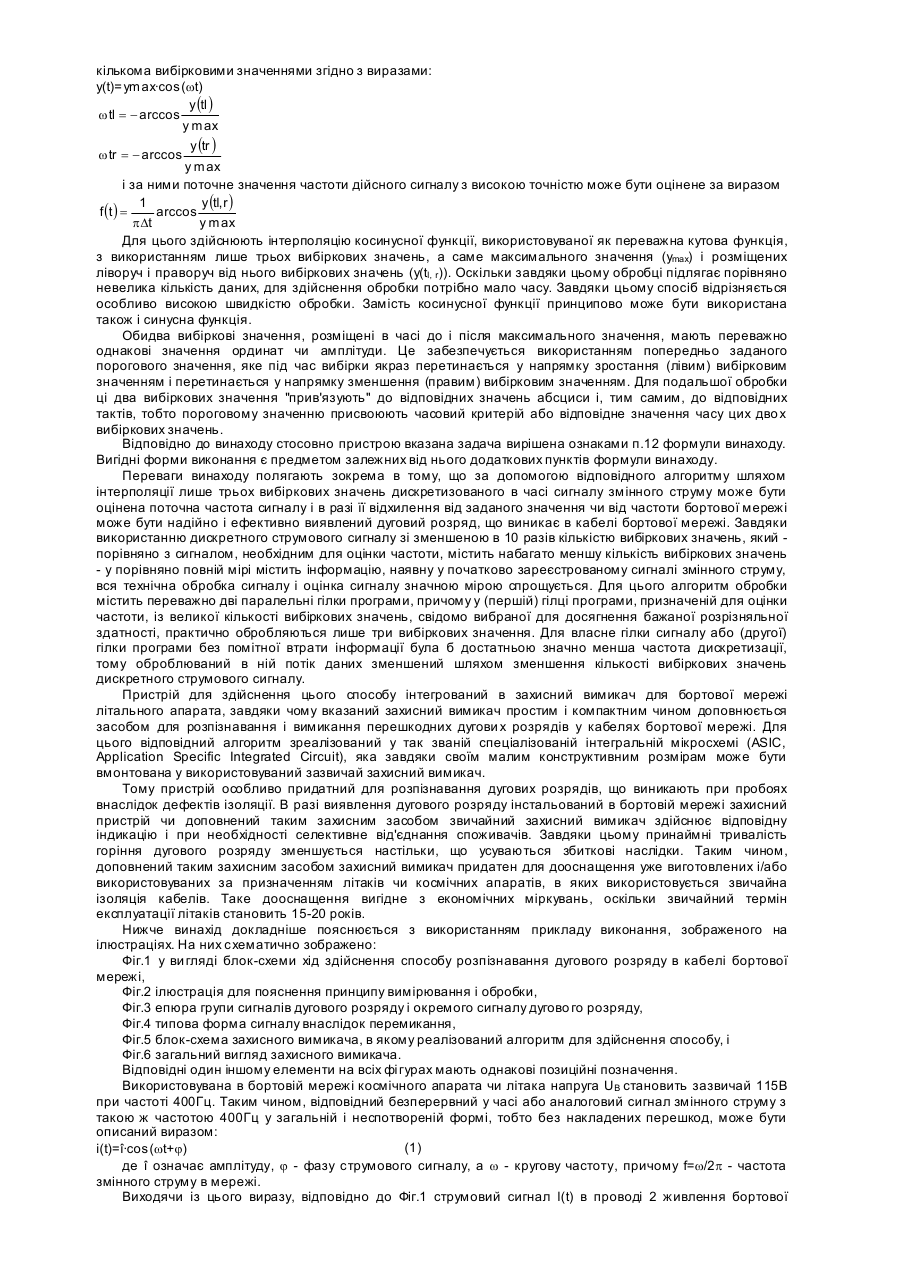
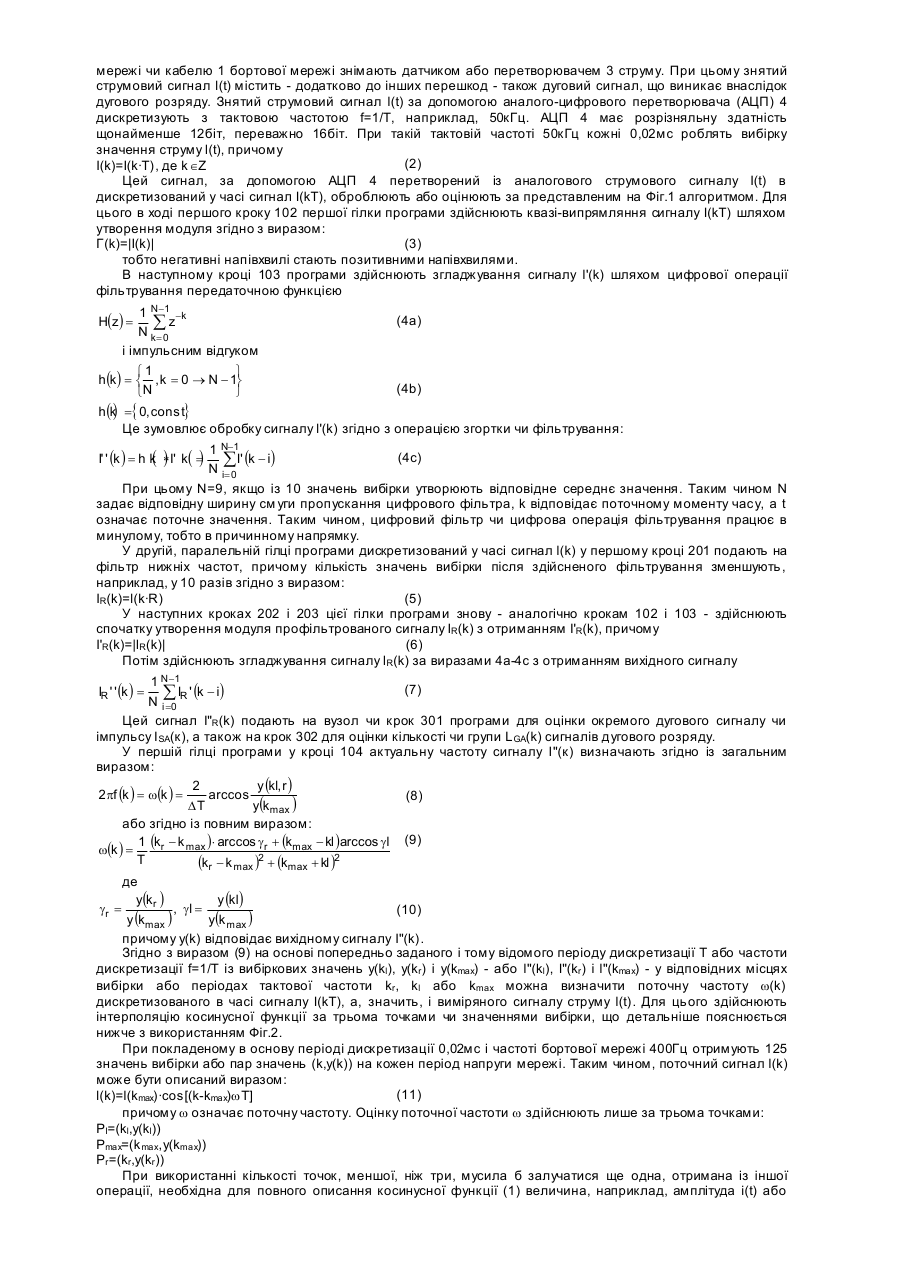
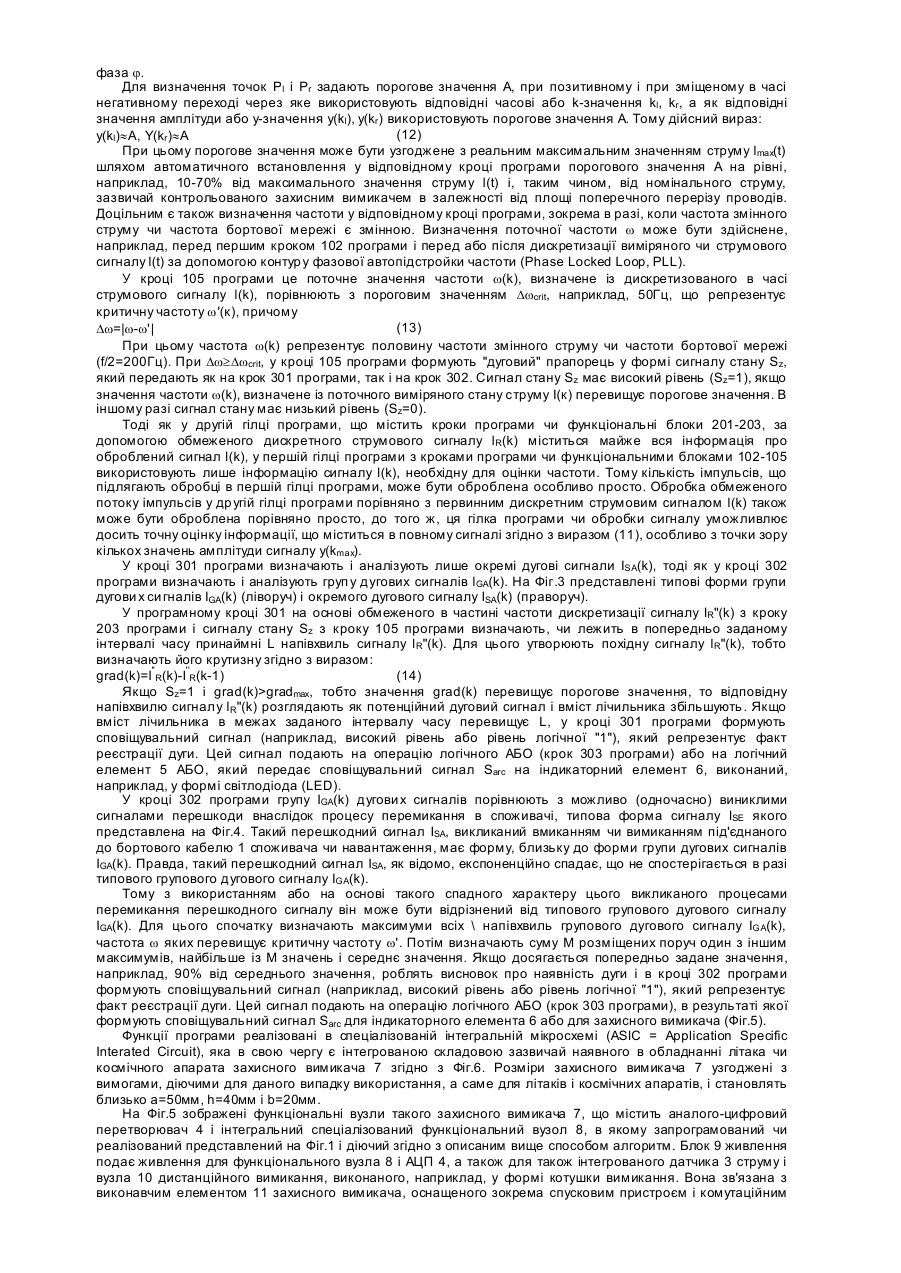
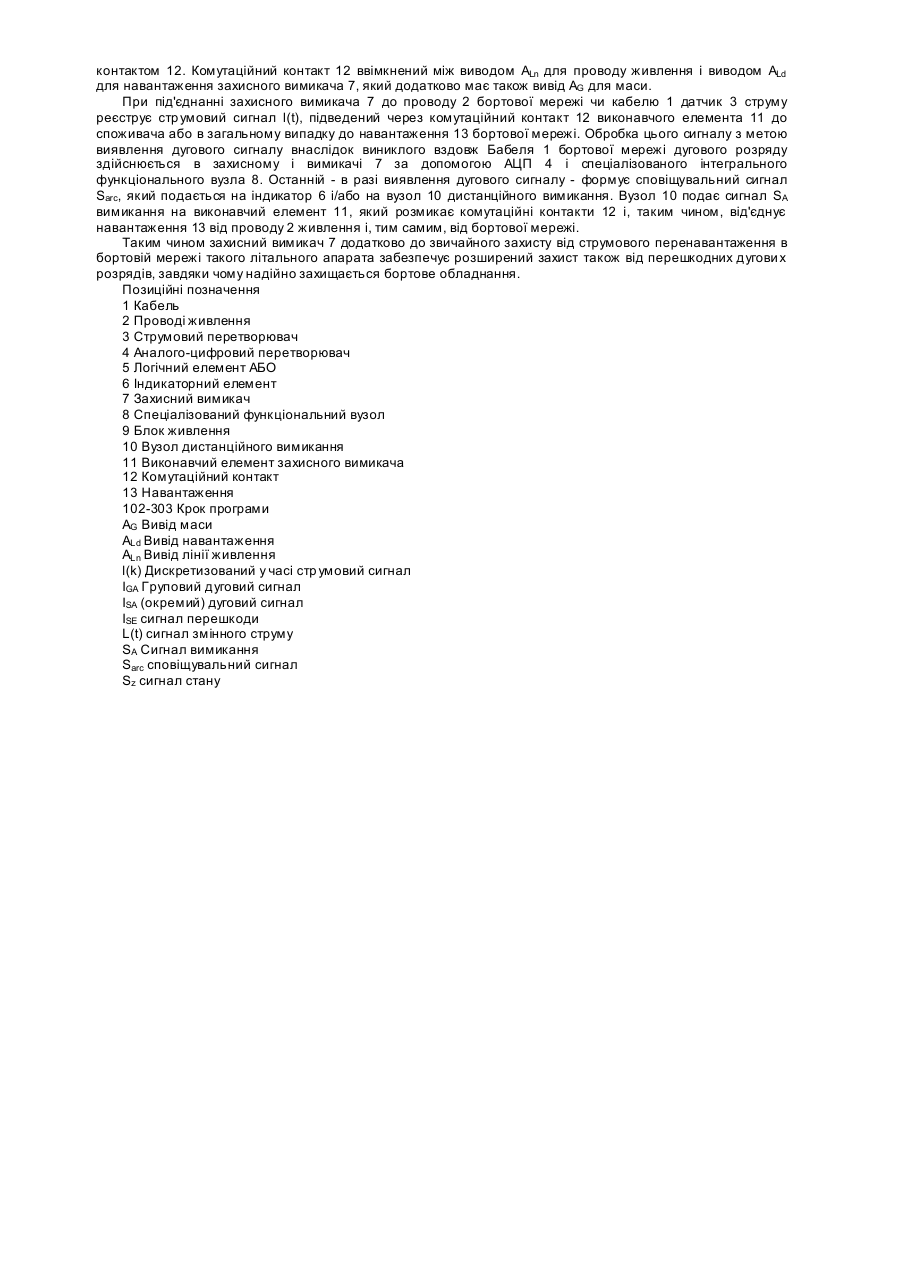
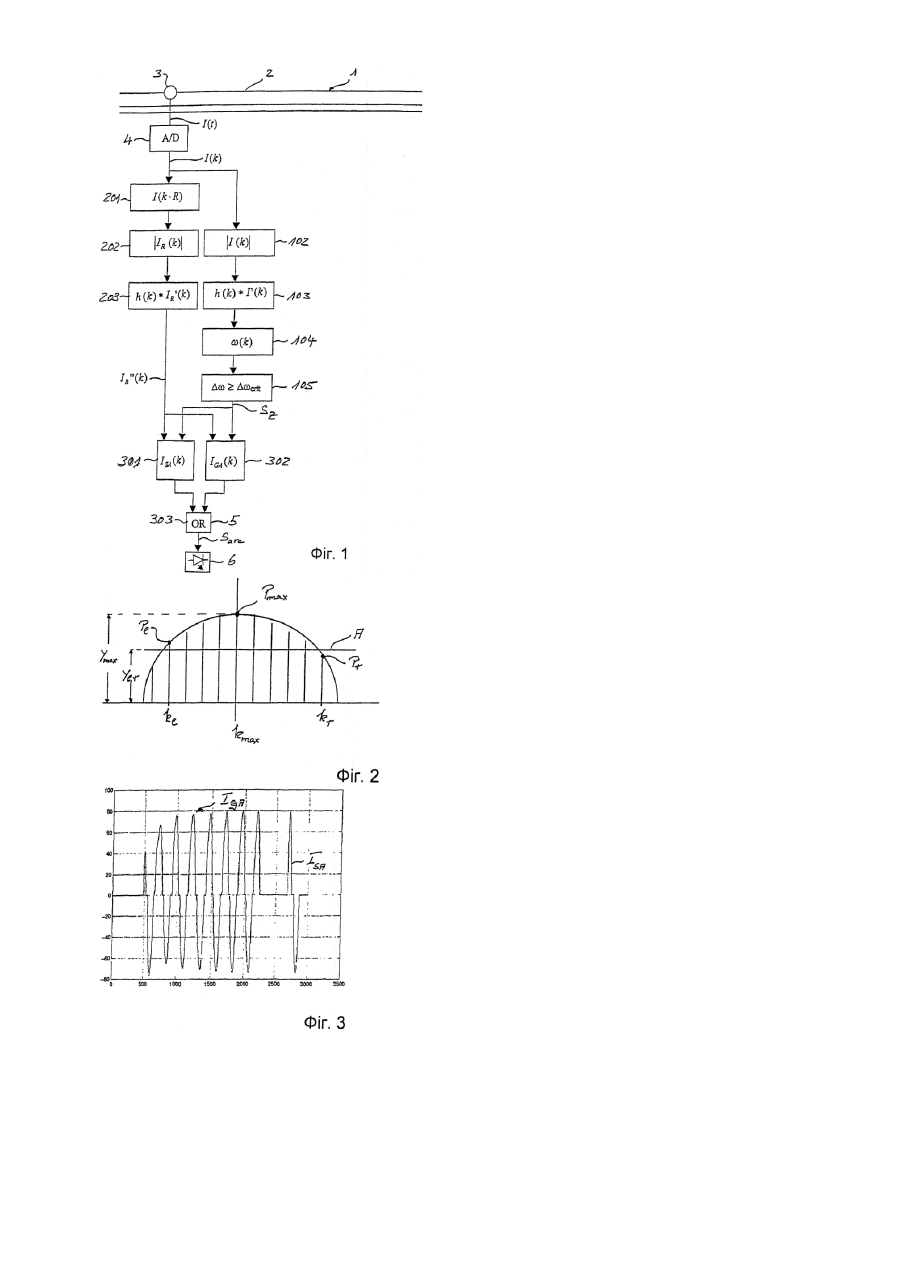
Винахід стосується способу розпізнавання перешкодних дугови х розрядів у кабелі, зокрема в бортовому кабелі літака чи космічного апарата. Крім того, винахід стосується пристрою для здійснення способу. При цьому під перешкодними дуговими розрядами слід розуміти зокрема так звані Arc Tracking. Проблема так званих "дугови х розрядів у кабелях" (Cable Arc Tracking) зокрема в бортових мережах літаків і космічних апаратів відома багато років. При такому дуговому розряді (Arc Tracking) в пучку кабелів між двома розміщеними поруч кабелями внаслідок, наприклад, ранішого пошкодження і/або забруднення ("мокрий" дуговий розряд, Wet Arc Tracking) або протирання ізоляції об гостру кромку ("сухий" дуговий розряд, Dry Arc Tracking) виникає електричний зв'язок. Цей зв'язок може бути спочатку високоомним (Wet Arc Tracking) або відразу ж низькоомним (Dry Arc Tracking). При цьому "мокрим" дуговим розрядом (Wet Arc Tracking) називається електропровідний зв'язок між двома місцями пошкодження ізоляції, який виникає внаслідок наявності електроліту, наприклад, очищувальної рідини, що проникає в ізоляцію кабелів. Наслідком утворення дугового розряду часто є теплове руйнування всього пучка кабелів на його певному відрізку. На противагу цьому при "сухому" дуговому розряді (Dry Arc Tracking) утворюється порівняно низькоомний електричний зв'язок через металевий провідник і дуговий розряд виникає практично відразу ж . Він теж може призвести до теплового руйнування пучка кабелів. При цьому проблему становить не лише руйнування самого пучка кабелю. Більш критичними є наслідки, що можуть виникнути через займання оточуючих матеріалів. Вибухоподібні наслідки займання кабелів у свою чергу можуть бути причиною катастрофічних пошкоджень літака чи космічного апарата. При дослідженні причин виникнення перешкодних дугови х розрядів чи Arc Tracking в кабелях таких бортових мереж може бути доведено, що, з одного боку, стійкість кабельної ізоляції проти Arc Tracking залежить виключно від структури матеріалів, використаних для виготовлення кабельних оболонок. З іншого боку, використовуваний досі матеріал (ПОЛІІМІД) відрізняється дуже високою здатністю поглинати воду, що сприяє пошкодженню матеріалу внаслідок утворення тріщин, особливо при частих змінах температури, які спостерігаються при експлуатації кабелів у літальних апаратах. До того ж, при тепловому руйнуванні матеріалу утворюються відкладення, що карбонізуються при температурах від 800°С, і, таким чином, уможливлюється Arc Tracking, тобто подальше поширення дуги вздовж кабельного джгута. На противагу цьому є матеріали, наприклад, ПОЛІТЕТРАФТОРЕТИЛЕН (ПТФЕ), порівняно стійкі проти Arc Tracking. Оскільки використовувані в авіації типи кабелів мають ізоляцію із поліімідної плівки, досі всі зусилля в цій галузі були спрямовані на розробку методів тестування, які забезпечили б якомога більш однозначну класифікацію кабелів з точки зору їх стійкості проти Arc Tracking. При цьому ПОЛІІМІД як складова оболонок кабелів завдяки своїм відмінним діелектричним властивостям і високій теплостійкості досі не був замінений. Правда, незважаючи на оптимізацію процесів і дотримання найвищої ретельності при виготовленні і прокладанні пучків кабелів, нещасних випадків внаслідок Cable Arc Tracking повністю уникнути не вдалося. До того ж, було визнано, що і в рознімних з'єднаннях під впливом вологи і забруднення можуть виникати пробої, які у найнесприятливіших випадках ведуть до займання сусідніх деталей. Застосування захисних засобів утруднюється тим, що амплітуда стр уму, що протікає під час процесу дугового розряду (Arc Tracking), особливо при "мокрому" дуговому розряді (Wet Arc Tracking), може бути значно нижчою від номінального струму використовуваних зазвичай засобів захисту від стр умового перенавантаження, внаслідок чого вони не спрацьовують. Відповідно до цього значення амплітуд стр уму при "сухому" дуговому розряді (Dry Arc Tracking) суттєво ви щі. Одначе вони виникають, як правило, короткими інтервалами, тому перетвореної енергії часто недостатньо для спрацьовування інстальованих захисних засобів. Тому для подолання цієї проблеми необхідно вже наявні звичайні засоби захисту від струмового перенавантаження в бортових мережах таких літальних апаратів доповнити додатковим захистом від дугови х розрядів з метою якомога більш надійного захисту бортового обладнання. Тому в основі винаходу лежить задача розробки особливо придатного способу розпізнавання перешкодних дугови х розрядів у кабелях, зокрема в кабелях бортових мереж літаків і космічних апаратів. Крім того, має бути розроблений придатний для здійснення вказаного способу пристрій, який простим і компактним чином уможливлює надійний захист кабелю чи пучка кабелів і/або споживача, до якого вони підведені, також і проти перешкодних дугови х розрядів (Arc Tracking). Стосовно способу ця задача вирішена ознаками п.1 формули винаходу. Доцільні вдосконалення є предметом залежних від нього додаткових пунктів формули винаходу. Для цього здійснюють дискретизовану в часі вибірку зареєстрованого сигналу змінного струму і шляхом інтерполяції переважно лише незначної кількості значень вибірки визначають кутову функцію, що репрезентуює форму змінного струмового сигналу, і за якою визначають поточну частоту змінного струму. Потім шляхом порівняння поточної частоти змінного струмового сигналу з опорною або заданою частотою роблять висновок про наявність дугового розряду і в разі необхідності формують сповіщальний сигнал. При цьому опорна або задана частота є генерованою частотою змінного струму, тобто в переважному випадку це - частота бортової мережі або половина частоти бортової мережі. Крім того, може бути задано також отримане із заданої частоти критичне значення частоти. Ним може бути, наприклад, більш, ніж 10процентне перевищення . частоти бортової мережі. В основі винаходу лежить знання того факту, що при виникненні дугового розряду чи Arc Tracking на сигнал, що передається проводами живлення в пучку кабелів бортової мережі, тобто на синусний чи косинусний сигнал змінного струму, накладається сигнал перешкоди, причому внаслідок пробілів у цьому перешкодному сигналі внаслідок гасіння і повторного виникнення дугового розряду кожна напівхвиля перешкодного сигналу має характеристичну частоту, що перевищує номінальну частоту струм у, яким живиться бортове обладнання. Сигнал дугового розряду міститься у виміряному стр умовому сигналі у формі піків, що можуть виникати у різних місцях позитивних чи негативних напівхвиль вимірювального сигналу, описаного далі як косинусний сигнал. Оскільки такі накладення чи перешкоди внаслідок дугового розряду краще розпізнаються у сигналі струму і гірше у сигналі напруги, доцільною є реєстрація струмового сигналу. Винахід виходить із міркування, що аналоговий виміряний сигнал, поточна часова характеристика якого дискретизовано в часі оброблена аналого-цифровим перетворювачем, може бути відтворений лише за кількома вибірковими значеннями згідно з виразами: y(t)=ymax·cos(wt) y (tl ) w tl = - arccos y max y (tr ) w tr = - arccos y max і за ними поточне значення частоти дійсного сигналу з високою точністю може бути оцінене за виразом 1 y (tl, r ) f (t ) = arccos p Dt y max Для цього здійснюють інтерполяцію косинусної функції, використовуваної як переважна кутова функція, з використанням лише трьох вибіркових значень, а саме максимального значення (ymax) і розміщених ліворуч і праворуч від нього вибіркових значень (y(tl, r)). Оскільки завдяки цьому обробці підлягає порівняно невелика кількість даних, для здійснення обробки потрібно мало часу. Завдяки цьому спосіб відрізняється особливо високою швидкістю обробки. Замість косинусної функції принципово може бути використана також і синусна функція. Обидва вибіркові значення, розміщені в часі до і після максимального значення, мають переважно однакові значення ординат чи амплітуди. Це забезпечується використанням попередньо заданого порогового значення, яке під час вибірки якраз перетинається у напрямку зростання (лівим) вибірковим значенням і перетинається у напрямку зменшення (правим) вибірковим значенням. Для подальшої обробки ці два вибіркових значення "прив'язують" до відповідних значень абсциси і, тим самим, до відповідних тактів, тобто пороговому значенню присвоюють часовий критерій або відповідне значення часу цих дво х вибіркових значень. Відповідно до винаходу стосовно пристрою вказана задача вирішена ознаками п.12 формули винаходу. Вигідні форми виконання є предметом залежних від нього додаткових пунктів формули винаходу. Переваги винаходу полягають зокрема в тому, що за допомогою відповідного алгоритму шляхом інтерполяції лише трьох вибіркових значень дискретизованого в часі сигналу змінного струму може бути оцінена поточна частота сигналу і в разі її відхилення від заданого значення чи від частоти бортової мережі може бути надійно і ефективно виявлений дуговий розряд, що виникає в кабелі бортової мережі. Завдяки використанню дискретного струмового сигналу зі зменшеною в 10 разів кількістю вибіркових значень, який порівняно з сигналом, необхідним для оцінки частоти, містить набагато меншу кількість вибіркових значень - у порівняно повній мірі містить інформацію, наявну у початково зареєстрованому сигналі змінного струму, вся технічна обробка сигналу і оцінка сигналу значною мірою спрощується. Для цього алгоритм обробки містить переважно дві паралельні гілки програми, причому у (першій) гілці програми, призначеній для оцінки частоти, із великої кількості вибіркових значень, свідомо вибраної для досягнення бажаної розрізняльної здатності, практично обробляються лише три вибіркових значення. Для власне гілки сигналу або (другої) гілки програми без помітної втрати інформації була б достатньою значно менша частота дискретизації, тому оброблюваний в ній потік даних зменшений шляхом зменшення кількості вибіркових значень дискретного струмового сигналу. Пристрій для здійснення цього способу інтегрований в захисний вимикач для бортової мережі літального апарата, завдяки чому вказаний захисний вимикач простим і компактним чином доповнюється засобом для розпізнавання і вимикання перешкодних дугови х розрядів у кабелях бортової мережі. Для цього відповідний алгоритм зреалізований у так званій спеціалізованій інтегральній мікросхемі (ASIC, Application Specific Integrated Circuit), яка завдяки своїм малим конструктивним розмірам може бути вмонтована у використовуваний зазвичай захисний вимикач. Тому пристрій особливо придатний для розпізнавання дугових розрядів, що виникають при пробоях внаслідок дефектів ізоляції. В разі виявлення дугового розряду інстальований в бортовій мережі захисний пристрій чи доповнений таким захисним засобом звичайний захисний вимикач здійснює відповідну індикацію і при необхідності селективне від'єднання споживачів. Завдяки цьому принаймні тривалість горіння дугового розряду зменшується настільки, що усуваються збиткові наслідки. Таким чином, доповнений таким захисним засобом захисний вимикач придатен для дооснащення уже виготовлених і/або використовуваних за призначенням літаків чи космічних апаратів, в яких використовується звичайна ізоляція кабелів. Таке дооснащення вигідне з економічних міркувань, оскільки звичайний термін експлуатації літаків становить 15-20 років. Нижче винахід докладніше пояснюється з використанням прикладу виконання, зображеного на ілюстраціях. На них схематично зображено: Фіг.1 у ви гляді блок-схеми хід здійснення способу розпізнавання дугового розряду в кабелі бортової мережі, Фіг.2 ілюстрація для пояснення принципу вимірювання і обробки, Фіг.3 епюра групи сигналів дугового розряду і окремого сигналу дугово го розряду, Фіг.4 типова форма сигналу внаслідок перемикання, Фіг.5 блок-схема захисного вимикача, в якому реалізований алгоритм для здійснення способу, і Фіг.6 загальний вигляд захисного вимикача. Відповідні один іншому елементи на всіх фі гурах мають однакові позиційні позначення. Використовувана в бортовій мережі космічного апарата чи літака напруга U В становить зазвичай 115В при частоті 400Гц. Таким чином, відповідний безперервний у часі або аналоговий сигнал змінного струму з такою ж частотою 400Гц у загальній і неспотвореній формі, тобто без накладених перешкод, може бути описаний виразом: (1) i(t)=î·cos(wt+j) де î означає амплітуду, j - фазу струмового сигналу, а w - кругову частоту, причому f=w/2p - частота змінного струму в мережі. Виходячи із цього виразу, відповідно до Фіг.1 струмовий сигнал l(t) в проводі 2 живлення бортової мережі чи кабелю 1 бортової мережі знімають датчиком або перетворювачем 3 струму. При цьому знятий струмовий сигнал l(t) містить - додатково до інших перешкод - також дуговий сигнал, що виникає внаслідок дугового розряду. Знятий струмовий сигнал l(t) за допомогою аналого-цифрового перетворювача (АЦП) 4 дискретизують з тактовою частотою f=1/Т, наприклад, 50кГц. АЦП 4 має розрізняльну здатність щонайменше 12біт, переважно 16біт. При такій тактовій частоті 50кГц кожні 0,02мс роблять вибірку значення струму l(t), причому (2) І(k)=І(k·Т), де kÎZ Цей сигнал, за допомогою АЦП 4 перетворений із аналогового струмового сигналу Ι(t) в дискретизований у часі сигнал І(kТ), оброблюють або оцінюють за представленим на Фіг.1 алгоритмом. Для цього в ході першого кроку 102 першої гілки програми здійснюють квазі-випрямляння сигналу І(kТ) шляхом утворення модуля згідно з виразом: Г(k)=|I(k)| (3) тобто негативні напівхвилі стають позитивними напівхвилями. В наступному кроці 103 програми здійснюють згладжування сигналу l'(k) шляхом цифрової операції фільтрування передаточною функцією 1 N-1 -k åz N k =0 і імпульсним відгуком ì1 ü h(k) = í , k = 0 ® N - 1ý îN þ H(z) = (4а) (4b) h(k ={ 0, const} ) Це зумовлює обробку сигналу l'(k) згідно з операцією згортки чи фільтрування: 1 N-1 (4с) å I' (k - i) N i=0 При цьому N=9, якщо із 10 значень вибірки утворюють відповідне середнє значення. Таким чином N задає відповідну ширину см уги пропускання цифрового фільтра, k відповідає поточному моменту часу, а t означає поточне значення. Таким чином, цифровий фільтр чи цифрова операція фільтрування працює в минулому, тобто в причинному напрямку. У другій, паралельній гілці програми дискретизований у часі сигнал l(k) у першому кроці 201 подають на фільтр нижніх частот, причому кількість значень вибірки після здійсненого фільтрування зменшують, наприклад, у 10 разів згідно з виразом: IR(k)=l(k·R) (5) У наступних кроках 202 і 203 цієї гілки програми знову - аналогічно крокам 102 і 103 - здійснюють спочатку утворення модуля профільтрованого сигналу ІR(k) з отриманням І'R(k), причому I'R(k)=|lR(k)| (6) Потім здійснюють згладжування сигналу lR(k) за виразами 4а-4с з отриманням вихідного сигналу I' ' (k ) = h k *I' k( = () ) 1 N-1 (7) å I ' (k - i) N i =0 R Цей сигнал I''R(k) подають на вузол чи крок 301 програми для оцінки окремого дугового сигналу чи імпульсу І SA(к), а також на крок 302 для оцінки кількості чи групи L GA(k) сигналів дугового розряду. У першій гілці програми у кроці 104 актуальну частоту сигналу I''(к) визначають згідно із загальним виразом: 2 y (kl, r ) 2pf (k ) = w(k ) = arccos (8) DT y(kmax ) або згідно із повним виразом: 1 (kr - k max )× arccos gr + (kmax - kl )arccos gl (9) IR ' ' (k ) = w(k ) = T (kr - k max )2 + (kmax + kl )2 де y(kr ) y (kl) gr = , gl = (10) (kmax ) (k max ) y y причому у(k) відповідає вихідному сигналу І''(k). Згідно з виразом (9) на основі попередньо заданого і тому відомого періоду дискретизації Τ або частоти дискретизації f=1/Т із вибіркових значень у(kl), у(kr) і у(kmax) - або l''(kl), І''(kr) і l''(kmax) - у відповідних місцях вибірки або періодах тактової частоти kr, kl або kmax можна визначити поточну частоту w(k) дискретизованого в часі сигналу І(kТ), а, значить, і виміряного сигналу струму l(t). Для цього здійснюють інтерполяцію косинусної функції за трьома точками чи значеннями вибірки, що детальніше пояснюється нижче з використанням Фіг.2. При покладеному в основу періоді дискретизації 0,02мс і частоті бортової мережi 400Гц отримують 125 значень вибірки або пар значень (k,y(k)) на кожен період напруги мережі. Таким чином, поточний сигнал l(k) може бути описаний виразом: (11) l(k)=l(kmax)·cos[(k-kmax)wT] причому w означає поточну частоту. Оцінку поточної частоти w здійснюють лише за трьома точками: PI=(kl,y(kl)) Pmax=(k max,y(kmax)) Pr=(kr,y(kr)) При використанні кількості точок, меншої, ніж три, мусила б залучатися ще одна, отримана із іншої операції, необхідна для повного описання косинусної функції (1) величина, наприклад, амплітуда i(t) або фаза j. Для визначення точок Рl і Рr задають порогове значення А, при позитивному і при зміщеному в часі негативному переході через яке використовують відповідні часові або k-значення kl, kr, а як відповідні значення амплітуди або у-значення у(kl), у(kr) використовують порогове значення А. Тому дійсний вираз: (12) y(kl)»A, Y(kr)»A При цьому порогове значення може бути узгоджене з реальним максимальним значенням струму l max(t) шляхом автоматичного встановлення у відповідному кроці програми порогового значення А на рівні, наприклад, 10-70% від максимального значення струму l(t) і, таким чином, від номінального струму, зазвичай контрольованого захисним вимикачем в залежності від площі поперечного перерізу проводів. Доцільним є також визначення частоти у відповідному кроці програми, зокрема в разі, коли частота змінного струму чи частота бортової мережі є змінною. Визначення поточної частоти w може бути здійснене, наприклад, перед першим кроком 102 програми і перед або після дискретизації виміряного чи струмового сигналу l(t) за допомогою контур у фазової автопідстройки частоти (Phase Locked Loop, PLL). У кроці 105 програми це поточне значення частоти w(k), визначене із дискретизованого в часі струмового сигналу l(k), порівнюють з пороговим значенням Dwcrit, наприклад, 50Гц, що репрезентує критичну частоту w'(к), причому (13) Dw=|w-w'| При цьому частота w(k) репрезентує половину частоти змінного струму чи частоти бортової мережі (f/2=200Гц). При Dw³Dwcrit, у кроці 105 програми формують "дуговий" прапорець у формі сигналу стану Sz, який передають як на крок 301 програми, так і на крок 302. Сигнал стану Sz має високий рівень (Sz=1), якщо значення частоти w(k), визначене із поточного виміряного стану струму І(к) перевищує порогове значення. В іншому разі сигнал стану має низький рівень (Sz=0). Тоді як у другій гілці програми, що містить кроки програми чи функціональні блоки 201-203, за допомогою обмеженого дискретного струмового сигналу lR(k) міститься майже вся інформація про оброблений сигнал l(k), у першій гілці програми з кроками програми чи функціональними блоками 102-105 використовують лише інформацію сигналу l(k), необхідну для оцінки частоти. Тому кількість імпульсів, що підлягають обробці в першій гілці програми, може бути оброблена особливо просто. Обробка обмеженого потоку імпульсів у др угій гілці програми порівняно з первинним дискретним струмовим сигналом l(k) також може бути оброблена порівняно просто, до того ж, ця гілка програми чи обробки сигналу уможливлює досить точну оцінку інформації, що міститься в повному сигналі згідно з виразом (11), особливо з точки зору кількох значень амплітуди сигналу y(kmax). У кроці 301 програми визначають і аналізують лише окремі дугові сигнали ІSA(k), тоді як у кроці 302 програми визначають і аналізують груп у дугових сигналів lGA(k). На Фіг.3 представлені типові форми групи дугови х си гналів ІGA(k) (ліворуч) і окремого дугового сигналу ІSA(k) (праворуч). У програмному кроці 301 на основі обмеженого в частині частоти дискретизації сигналу IR''(k) з кроку 203 програми і сигналу стану Sz з кроку 105 програми визначають, чи лежить в попередньо заданому інтервалі часу принаймні L напівхвиль сигналу l R''(k). Для цього утворюють похідну сигналу lR''(k), тобто визначають його крутизну згідно з виразом: grad(k)=I'' R(k)-I''R(k-1) (14) Якщо Sz=1 і grad(k)>grad max, тобто значення grad(k) перевищує порогове значення, то відповідну напівхвилю сигналу lR''(k) розглядають як потенційний дуговий сигнал і вміст лічильника збільшують . Якщо вміст лічильника в межах заданого інтервалу часу перевищує L, у кроці 301 програми формують сповіщувальний сигнал (наприклад, високий рівень або рівень логічної "1"), який репрезентує факт реєстрації дуги. Цей сигнал подають на операцію логічного АБО (крок 303 програми) або на логічний елемент 5 АБО, який передає сповіщувальний сигнал Sarc на індикаторний елемент 6, виконаний, наприклад, у формі світлодіода (LED). У кроці 302 програми групу IGA(k) дугови х сигналів порівнюють з можливо (одночасно) виниклими сигналами перешкоди внаслідок процесу перемикання в споживачі, типова форма сигналу ISE якого представлена на Фіг.4. Такий перешкодний сигнал ISA, викликаний вмиканням чи вимиканням під'єднаного до бортового кабелю 1 споживача чи навантаження, має форму, близьку до форми групи дугових сигналів ІGA(k). Правда, такий перешкодний сигнал ISA, як відомо, експоненційно спадає, що не спостерігається в разі типового групового дугового сигналу ІGA(k). Тому з використанням або на основі такого спадного характеру цього викликаного процесами перемикання перешкодного сигналу він може бути відрізнений від типового групового дугового сигналу ІGA(k). Для цього спочатку визначають максимуми всіх \ напівхвиль групового дугового сигналу IGA(k), частота w яких перевищує критичну частоту w'. Потім визначають суму Μ розміщених поруч один з іншим максимумів, найбільше із Μ значень і середнє значення. Якщо досягається попередньо задане значення, наприклад, 90% від середнього значення, роблять висновок про наявність дуги і в кроці 302 програми формують сповіщувальний сигнал (наприклад, високий рівень або рівень логічної "1"), який репрезентує факт реєстрації дуги. Цей сигнал подають на операцію логічного АБО (крок 303 програми), в результаті якої формують сповіщувальний сигнал Sarc для індикаторного елемента 6 або для захисного вимикача (Фіг.5). Функції програми реалізовані в спеціалізованій інтегральній мікросхемі (ASIC = Application Specific Interated Circuit), яка в свою чергу є інтегрованою складовою зазвичай наявного в обладнанні літака чи космічного апарата захисного вимикача 7 згідно з Фіг.6. Розміри захисного вимикача 7 узгоджені з вимогами, діючими для даного випадку використання, а саме для літаків і космічних апаратів, і становлять близько а=50мм, h=40мм і b=20мм. На Фіг.5 зображені функціональні вузли такого захисного вимикача 7, що містить аналого-цифровий перетворювач 4 і інтегральний спеціалізований функціональний вузол 8, в якому запрограмований чи реалізований представлений на Фіг.1 і діючий згідно з описаним вище способом алгоритм. Блок 9 живлення подає живлення для функціонального вузла 8 і АЦП 4, а також для також інтегрованого датчика 3 струму і вузла 10 дистанційного вимикання, виконаного, наприклад, у формі котушки вимикання. Вона зв'язана з виконавчим елементом 11 захисного вимикача, оснащеного зокрема спусковим пристроєм і комутаційним контактом 12. Комутаційний контакт 12 ввімкнений між виводом ALn для проводу живлення і виводом ALd для навантаження захисного вимикача 7, який додатково має також вивід AG для маси. При під'єднанні захисного вимикача 7 до проводу 2 бортової мережі чи кабелю 1 датчик 3 струму реєструє стр умовий сигнал l(t), підведений через комутаційний контакт 12 виконавчого елемента 11 до споживача або в загальному випадку до навантаження 13 бортової мережі. Обробка цього сигналу з метою виявлення дугового сигналу внаслідок виниклого вздовж Бабеля 1 бортової мережі дугового розряду здійснюється в захисному і вимикачі 7 за допомогою АЦП 4 і спеціалізованого інтегрального функціонального вузла 8. Останній - в разі виявлення дугового сигналу - формує сповіщувальний сигнал Sarc, який подається на індикатор 6 і/або на вузол 10 дистанційного вимикання. Вузол 10 подає сигнал SА вимикання на виконавчий елемент 11, який розмикає комутаційні контакти 12 і, таким чином, від'єднує навантаження 13 від проводу 2 живлення і, тим самим, від бортової мережі. Таким чином захисний вимикач 7 додатково до звичайного захисту від струмового перенавантаження в бортовій мережі такого літального апарата забезпечує розширений захист також від перешкодних дугови х розрядів, завдяки чому надійно захищається бортове обладнання. Позиційні позначення 1 Кабель 2 Проводі живлення 3 Струмовий перетворювач 4 Аналого-цифровий перетворювач 5 Логічний елемент АБО 6 Індикаторний елемент 7 Захисний вимикач 8 Спеціалізований функціональний вузол 9 Блок живлення 10 Вузол дистанційного вимикання 11 Виконавчий елемент захисного вимикача 12 Комутаційний контакт 13 Навантаження 102-303 Крок програми AG Вивід маси АLd Вивід навантаження АLn Вивід лінії живлення l(k) Дискретизований у часі стр умовий сигнал IGA Груповий дуговий сигнал ISA (окремий) дуговий сигнал ISE сигнал перешкоди L(t) сигнал змінного струму SA Сигнал вимикання Sarc сповіщувальний сигнал Sz сигнал стану
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for detecting accidental arc discharges, a device for the realization of the method, and a switch for protection against arc discharges
Назва патенту російськоюСпособ обнаружения случайных электрических дуговых разрядов, устройство для осуществления способа и выключатель для защиты от электрических дуговых разрядов
МПК / Мітки
МПК: G01R 31/12
Мітки: захисний, здійснення, розпізнавання, дугових, перешкодних, пристрій, розрядів, вимикач, спосіб
Код посилання
<a href="https://ua.patents.su/7-72974-sposib-dlya-rozpiznavannya-pereshkodnikh-dugovikh-rozryadiv-pristrijj-dlya-jjogo-zdijjsnennya-i-zakhisnijj-vimikach.html" target="_blank" rel="follow" title="База патентів України">Спосіб для розпізнавання перешкодних дугових розрядів, пристрій для його здійснення і захисний вимикач</a>
Спосіб розпізнавання особи та пристрій для його здійснення
Номер патенту: 52978
Опубліковано: 16.08.2004
Автори: Петренко Андрій Васильович, Тараненко Юрій Карлович
МПК: G10L 15/00, G07C 9/00, G06K 9/00
Мітки: здійснення, розпізнавання, пристрій, спосіб, особи
Формула / Реферат:
1. Спосіб розпізнавання особи, що включає оптичну зйомку людського обличчя, розміщеного в заданій ділянці простору, за допомогою об'єктива з блоком зчитування, порівняння отриманого зображення з заздалегідь заданими зображеннями облич, що зберігаються у запам'ятовуючому блоці, який відрізняється тим, що додатково здійснюють оптичну зйомку долоні правої руки особи, особистого підпису особи, руху особи між заданими ділянками простору, запис...
Спосіб розпізнавання зображень з око-процесорним виділенням визначників та пристрій для його здійснення
Номер патенту: 52616
Опубліковано: 15.01.2003
Автори: Хамди Р.Рами, Понура Олена Іванівна, Кожем'яко Оксана Володимирівна, Кожем'яко Андрій Вікторович, Кожем'яко Володимир Прокопович, Павлов Сергій Володимирович
МПК: G06G 7/14, G06K 9/48, G06K 9/00
Мітки: виділенням, здійснення, визначників, око-процесорним, спосіб, пристрій, зображень, розпізнавання
Формула / Реферат:
1. Пристрій для розпізнавання зображень з око-процесорним виділенням визначників, який містить паралельних суматорів (функціонально-інтегральних синтезаторів), який відрізняється тим, що додатково введені аналізатор інформації, блок синтезатора-генератора визначників, блок формування бази еталонних знань та вибору зразків еталонів, схема порівняння, що містить
Спосіб розпізнавання злито вимовлених слів та пристрій для його здійснення

Номер патенту: 48102
Опубліковано: 15.08.2002
Автори: Вінцюк Тарас Климович, Лисенко Олександр Борисович
МПК: G10L 11/00
Мітки: пристрій, вимовлених, розпізнавання, здійснення, злито, слів, спосіб
Формула / Реферат:
1. Способ распознавания слитно произнесенных слов, включающий выделение текущих параметров, формирование массивов номеров и моментов начала потенциально оканчивающихся слов и принятие решения о произнесенной последовательности слов, отличающийся тем, что, с целью повышения быстродействия, при формировании массивов рекуррентно накапливают интегральные меры сходства между последовательностью отсчетов текущих параметров от первого отсчета до...
Спосіб контролю ізоляції та пристрій для його здійснення
Номер патенту: 55738
Опубліковано: 15.04.2003
Автори: Скосирєв Віктор Георгієвич, Шкрабець Федір Павлович, Остапчук Олександр Володимирович
МПК: H02H 3/17
Мітки: ізоляції, контролю, пристрій, спосіб, здійснення
Формула / Реферат:
1. Спосіб контролю ізоляції розподільної мережі напругою вище 1000 В, що включає визначення значень активного опору ізоляції щодо землі мережі, який відрізняється тим, що визначають поточні значення активного опору і ємності ізоляції щодо землі на кожній ділянці мережі шляхом накладення на мережу струмів непромислової частоти.2. Пристрій контролю ізоляції розподільної мережі напругою вище 1000 В, що включає джерело оперативного струму,...
Спосіб забезпечення захищеного передавання цифрових даних (варіанти), пристрій (варіанти), захисний модуль (варіанти) і система для його здійснення
Номер патенту: 66921
Опубліковано: 15.06.2004
Автори: Дювуа Жан-Люк, Лепоріні Давід, Дюбланше Фредерік, Майяр Мішель
МПК: H04N 5/913
Мітки: цифрових, здійснення, захищеного, пристрій, варіанти, спосіб, модуль, система, передавання, забезпечення, даних, захисний
Формула / Реферат:
1. Спосіб забезпечення захищеного передавання цифрових даних між пристроями, який включає операції передавання від одного пристрою в автономний захисний модуль ідентифікатора пристрою і перевірки повноважності пристрою, в залежності від значення переданого ідентифікатора.2. Спосіб за п. 1, який відрізняється тим, що захисний модуль виконує перевірку повноважності пристрою шляхом порівняння переданого ідентифікатора з щонайменше одним...
Попередній патент: Спосіб оброблення пророслого зерна пшениці
Наступний патент: Тюбик
Випадковий патент: Збірно-монолітне залізобетонне перекриття будинку