Гравітаційна система зв’язку


Формула / Реферат
Гравітаційна система зв'язку, яка містить гравітаційно пов'язані передавач та приймач, що містять масивні тіла, рух яких забезпечує транспортування сигналу, яка відрізняється тим, що передавач оснащений електронною схемою із відповідною програмою для отримання вхідного сигналу і, відповідно до нього, управління роботою силових приводів, призначених для переміщення масивних тіл, гравітаційно зв'язаних з вантажем, що міститься у приймачі, і приєднаний через пружину до нерухомої опори, при цьому приймач оснащений датчиком положення вантажу для формування вихідного сигналу.
Текст
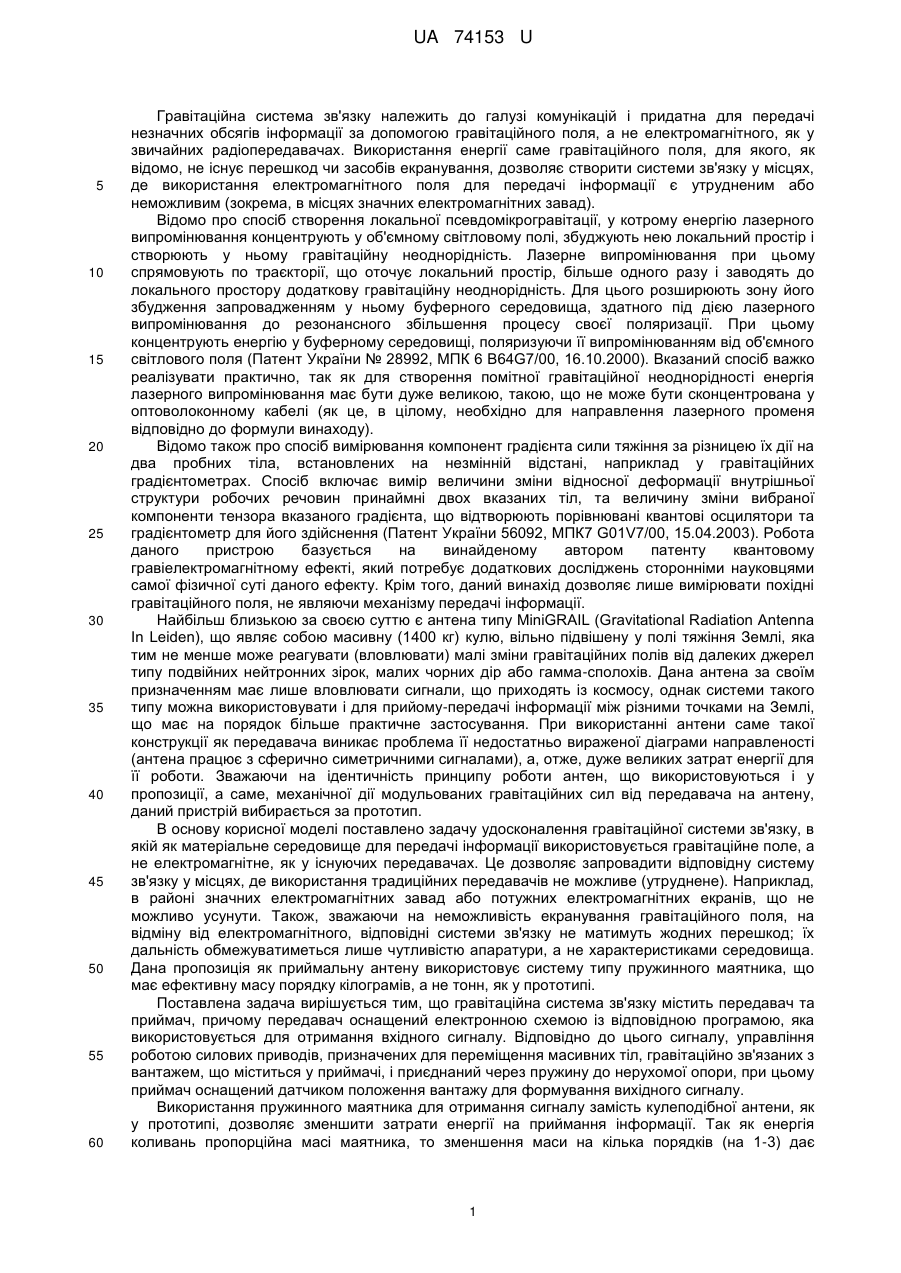
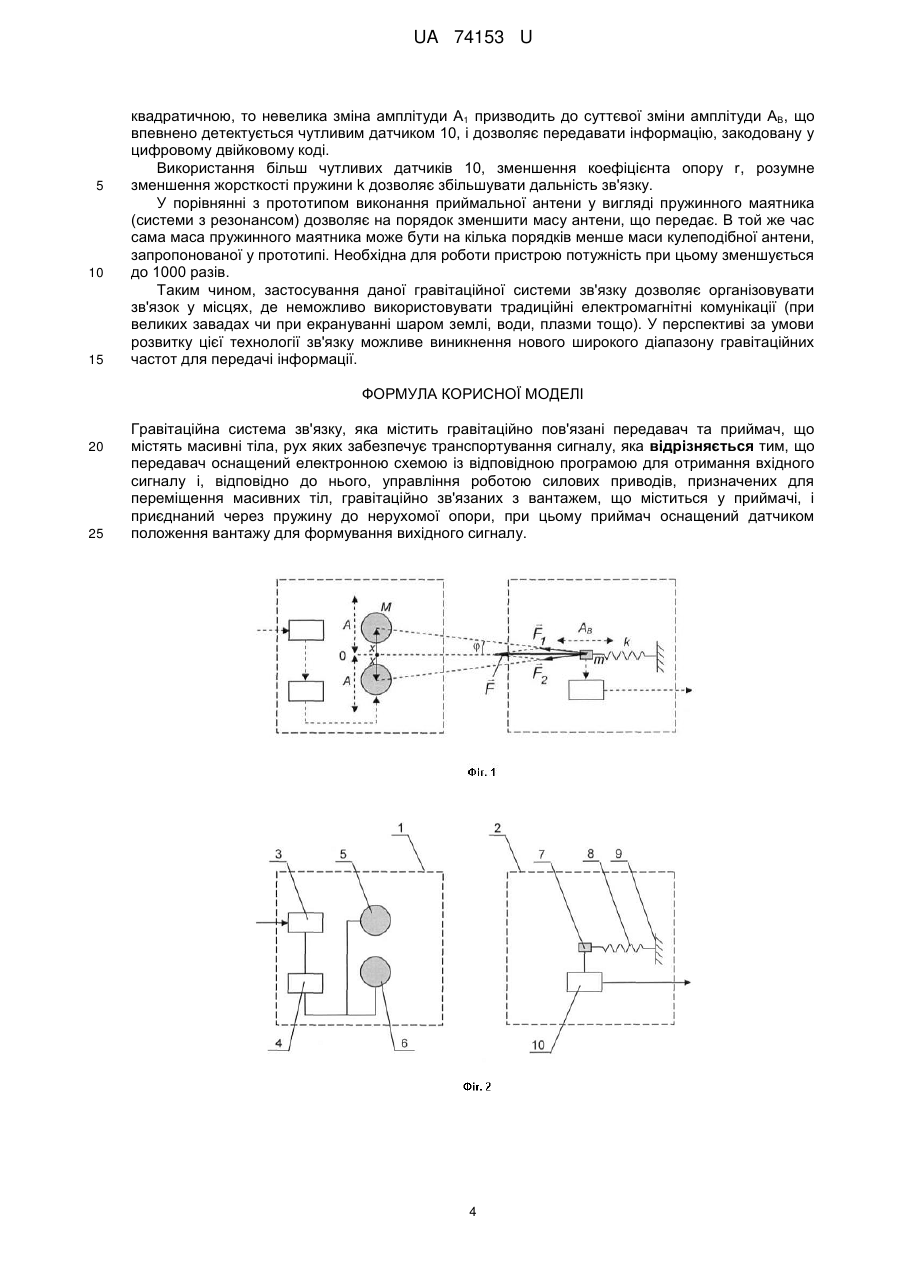
Реферат: UA 74153 U UA 74153 U 5 10 15 20 25 30 35 40 45 50 55 60 Гравітаційна система зв'язку належить до галузі комунікацій і придатна для передачі незначних обсягів інформації за допомогою гравітаційного поля, а не електромагнітного, як у звичайних радіопередавачах. Використання енергії саме гравітаційного поля, для якого, як відомо, не існує перешкод чи засобів екранування, дозволяє створити системи зв'язку у місцях, де використання електромагнітного поля для передачі інформації є утрудненим або неможливим (зокрема, в місцях значних електромагнітних завад). Відомо про спосіб створення локальної псевдомікрогравітації, у котрому енергію лазерного випромінювання концентрують у об'ємному світловому полі, збуджують нею локальний простір і створюють у ньому гравітаційну неоднорідність. Лазерне випромінювання при цьому спрямовують по траєкторії, що оточує локальний простір, більше одного разу і заводять до локального простору додаткову гравітаційну неоднорідність. Для цього розширюють зону його збудження запровадженням у ньому буферного середовища, здатного під дією лазерного випромінювання до резонансного збільшення процесу своєї поляризації. При цьому концентрують енергію у буферному середовищі, поляризуючи її випромінюванням від об'ємного світлового поля (Патент України № 28992, МПК 6 B64G7/00, 16.10.2000). Вказаний спосіб важко реалізувати практично, так як для створення помітної гравітаційної неоднорідності енергія лазерного випромінювання має бути дуже великою, такою, що не може бути сконцентрована у оптоволоконному кабелі (як це, в цілому, необхідно для направлення лазерного променя відповідно до формули винаходу). Відомо також про спосіб вимірювання компонент градієнта сили тяжіння за різницею їх дії на два пробних тіла, встановлених на незмінній відстані, наприклад у гравітаційних градієнтометрах. Спосіб включає вимір величини зміни відносної деформації внутрішньої структури робочих речовин принаймні двох вказаних тіл, та величину зміни вибраної компоненти тензора вказаного градієнта, що відтворюють порівнювані квантові осцилятори та градієнтометр для його здійснення (Патент України 56092, МПК7 G01V7/00, 15.04.2003). Робота даного пристрою базується на винайденому автором патенту квантовому гравіелектромагнітному ефекті, який потребує додаткових досліджень сторонніми науковцями самої фізичної суті даного ефекту. Крім того, даний винахід дозволяє лише вимірювати похідні гравітаційного поля, не являючи механізму передачі інформації. Найбільш близькою за своєю суттю є антена типу MiniGRAIL (Gravitational Radiation Antenna In Leiden), що являє собою масивну (1400 кг) кулю, вільно підвішену у полі тяжіння Землі, яка тим не менше може реагувати (вловлювати) малі зміни гравітаційних полів від далеких джерел типу подвійних нейтронних зірок, малих чорних дір або гамма-сполохів. Дана антена за своїм призначенням має лише вловлювати сигнали, що приходять із космосу, однак системи такого типу можна використовувати і для прийому-передачі інформації між різними точками на Землі, що має на порядок більше практичне застосування. При використанні антени саме такої конструкції як передавача виникає проблема її недостатньо вираженої діаграми направленості (антена працює з сферично симетричними сигналами), а, отже, дуже великих затрат енергії для її роботи. Зважаючи на ідентичність принципу роботи антен, що використовуються і у пропозиції, а саме, механічної дії модульованих гравітаційних сил від передавача на антену, даний пристрій вибирається за прототип. В основу корисної моделі поставлено задачу удосконалення гравітаційної системи зв'язку, в якій як матеріальне середовище для передачі інформації використовується гравітаційне поле, а не електромагнітне, як у існуючих передавачах. Це дозволяє запровадити відповідну систему зв'язку у місцях, де використання традиційних передавачів не можливе (утруднене). Наприклад, в районі значних електромагнітних завад або потужних електромагнітних екранів, що не можливо усунути. Також, зважаючи на неможливість екранування гравітаційного поля, на відміну від електромагнітного, відповідні системи зв'язку не матимуть жодних перешкод; їх дальність обмежуватиметься лише чутливістю апаратури, а не характеристиками середовища. Дана пропозиція як приймальну антену використовує систему типу пружинного маятника, що має ефективну масу порядку кілограмів, а не тонн, як у прототипі. Поставлена задача вирішується тим, що гравітаційна система зв'язку містить передавач та приймач, причому передавач оснащений електронною схемою із відповідною програмою, яка використовується для отримання вхідного сигналу. Відповідно до цього сигналу, управління роботою силових приводів, призначених для переміщення масивних тіл, гравітаційно зв'язаних з вантажем, що міститься у приймачі, і приєднаний через пружину до нерухомої опори, при цьому приймач оснащений датчиком положення вантажу для формування вихідного сигналу. Використання пружинного маятника для отримання сигналу замість кулеподібної антени, як у прототипі, дозволяє зменшити затрати енергії на приймання інформації. Так як енергія коливань пропорційна масі маятника, то зменшення маси на кілька порядків (на 1-3) дає 1 UA 74153 U 10 відповідне зменшення потужності, необхідної для роботи системи: необхідна потужність може зменшуватися до 1000 разів. Крім кількісного зменшення споживаної потужності, використання саме гравітаційного поля дозволяє організувати систему бездротового зв'язку у як завгодно агресивних чи непрохідних середовищах, наприклад у зоні біля ядерного реактора (яка насичена фотонами високих енергій, які зазвичай викликають катастрофічні завади для роботи електромагнітних систем), чи систем підземного та підводного зв'язку. У далекій перспективі розвиток гравітаційних систем зв'язку дозволить широко використовувати нові частотні ресурси (окрім електромагнітних). Переміщення масивних тіл передавача у просторі викликає зміну сили притягання, що діє на вантаж приймача (див. фіг. 1): F F1 cos F2 cos 2F1 cos , 15 де F - загальна сила гравітаційної дії на вантаж; F1 та F2 - сила гравітаційної дії на вантаж приймача з боку першого та другого масивного тіла передавача відповідно; - кут між напрямками від вантажу приймача на масивні тіла передавача та нормаллю до відрізку, що з'єднує центри масивних тіл. Кут можна знайти через відстань d між передавачем та приймачем і відхилення x одного з масивних тіл передавача від нульового положення 5 (відхилення змінюється по гармонійному закону з частотою і амплітудою A1 чи A 2 в залежності від значення сигналу, який передається): cos 1 20 d d2 x 2 1 x 1 d A 2 (1 cos( 2t )) 4d2 2 1 x2 2d2 1 A1 cos2 ( 2t ) 2d2 A2 A2 1 2 2 cos( 2t ) 4d 4 d . Постійну складову можна не враховувати, так як вона дає відповідну постійну складову деформації пружини (вважаємо, що деформації знаходяться у межах закону Гука, тому справедливий принцип суперпозиції), а, отже, не несе інформаційного навантаження. Друга складова є гармонічним зовнішнім впливом, частота якого дорівнює подвоєній частоті коливань масивних тіл. Так як відстань d звичайно набагато більша чим A1 чи A 2 , то модулі сил 25 взаємодії масивних тіл та вантажу F1 та F2 можна вважати весь час коливань однаковими. Отже, закон зміни зовнішньої сили F є гармонійним. Як відомо з теорії коливань, під дією гармонічної вимушуючої сили після закінчення перехідного процесу у системі встановлюються гармонічні коливання з частотою, рівною частоті зовнішнього впливу. Амплітуда цих вимушених коливань залежить від співвідношення параметрів системи та частоти зовнішнього впливу. Найбільша амплітуда коливань вантажу у приймачі досягається при резонансній частоті рез : рез 30 k r2 , рез 2 m 2m2 r - коефіцієнт пропорційності сили опору рухові пружинного маятника до швидкості його руху; m - маса вантажу приймача; k - жорсткість пружини. Прирівнюючи, отримаємо співвідношення між частотою коливань масивних тіл у передавачі та оптимальними параметрами приймача k , r , m : k r2 m 2m2 . 2 35 2 k m . Значення амплітуди A B , яке буде Якщо вважати затухання малим, то приблизно спостерігатися у даному випадку під час резонансних вимушених коливань: F AB r k r2 m 4m2 2F1 r k r2 m 4m2 A2 2 4d 2GMm r k r2 m 4m2 2 A2 2 4d GMm2 r 4km r 2 A2 d4 , UA 74153 U де G - гравітаційна стала; M - маса одного масивного тіла у передавачі. Якщо затухання мале, то 5 10 15 20 25 30 35 40 AB GMm2 r 4km r 2 A2 d4 GMm m A 2 2r k d4 , і конкретні розрахунки за цією формулою (приклад яких виконано нижче), показують, що отримане значення амплітуди A B дозволяє детектувати це зміщення. На кресленні показана схема розташування основних елементів гравітаційної системи зв'язку: фіг. 1 - схема роботи гравітаційної системи зв'язку, фіг. 2 - принципова схема гравітаційної системи зв'язку. Гравітаційна система зв'язку складається з передавальної частини 1 та приймальної 2. Передавальна частина містить електронну схему 3 для керування роботою приводів 4 силової системи. Приводи 4 є активною основою для роботи передавальної антени, яка являє собою механічну систему, що може за рахунок зміни внутрішньої структури, змінювати гравітаційну силу притягання у заданому напрямі (напрямах). Зокрема, це можуть бути два масивні тіла 5 і 6 (наприклад, кулеподібної форми) з протифазними коливаннями. Певне значення амплітуди задає логічний рівень сигналу: коливання із різними амплітудами дозволяють виконувати цифрове імпульсне кодування. Найпростіший і найпоширеніший випадок - цифрове двійкове кодування - можна реалізувати шляхом зведення куль до центру (положення "0" на кресленні, і, відповідно, логічний нуль) та максимального розведення (логічна одиниця). Або, як і у випадку імпульсного кодування, можна використовувати різні значення амплітуди A1 і A 2 для передачі, відповідно, логічного нуля та одиниці. Приймальна антена являє собою пружинний маятник, що складається з вантажу 7, прикріпленого на пружині 8 до нерухомої опори 9. Параметри маятника т та к підібрані таким чином, щоби при описаному вище імпульсному кодуванні резонансна частота маятника відповідала частоті коливання куль 5, 6. Амплітуда коливань вантажу 7 визначається датчиком 10, з якого сигнал передається із системи зв'язку у зовнішні пристрої. Як електронну схему 3 можна, наприклад, використати економічні, не перевантажені функціональністю мікроконтролерні пристрої, наприклад, типу РІС, Atmel. Силова система 4 може бути реалізована на основі дешевих крокових двигунів, керування якими виконується мікроконтролером. Також можливе використання більш надійних і потужних двигунів із сервоприводами. Потужність двигунів напряму впливає на швидкість передачі даних і має складати не менше 10 кВт. Як масивні тіла 5, 6 можливе використання шматків сталі (навіть і неправильної форми) масою порядку кількох тисяч кілограм, які можливо надійно закріпити на силових частинах приводів 4. Як датчик 10 може використовуватися прецизійний датчик лінійного положення, наприклад фірми B&R. Як датчик 10 також може бути використана лазерна інтерферометрична вимірювальна система, наприклад, XL-80 компанії Renishaw, яка має граничне лінійне розділення до 1 нанометру (на 3 порядки точніше, ніж необхідно для роботи гравітаційної системи зв'язку). Робота запропонованої системи зв'язку розпочинається із подачі електроживлення на електронну схему 3. Після цього на її інформаційний вхід починає подаватися послідовність двійкових розрядів, які підлягають передачі. Електронна схема в процесі роботи забезпечує буферизацію цієї послідовності, управляє подачею нового розряду при успішній передачі попереднього, керує роботою приводів 4. При необхідності передачі "0" чи "1" електронна схема встановлює режим роботи приводів 4, при якому амплітуда коливань масивних тіл 5, 6 складає A1 або A 2 . Відповідно до установленої амплітуди коливань масивних тіл 5, 6 за рахунок 45 50 55 гравітаційних сил встановлюється певна амплітуда АВ коливань вантажу 7 приймальної частини системи. Значення цієї амплітуди зчитується датчиком 10 і передається для подальшої інтерпретації зовнішнім пристроям, які підключені до системи зв'язку. Розглянемо приклад розрахунку режиму роботи системи при наступних конкретних значеннях її параметрів: М=500 кг; m=100 кг; d=10 м; А1=0,5м; k=1 Н/м; r=0,001 кг/с. У цьому випадку амплітуда коливань вантажу приймача досягає величин порядку 1 мкм, що із впевненістю може детектуватися сучасними прецизійними датчиками зміщення. Так як залежність амплітуди коливань вантажу 7 від амплітуди коливань масивних тіл 5, 6 є 3 UA 74153 U 5 10 15 квадратичною, то невелика зміна амплітуди А1 призводить до суттєвої зміни амплітуди АВ, що впевнено детектується чутливим датчиком 10, i дозволяє передавати інформацію, закодовану у цифровому двійковому коді. Використання більш чутливих датчиків 10, зменшення коефіцієнта опору r, розумне зменшення жорсткості пружини k дозволяє збільшувати дальність зв'язку. У порівнянні з прототипом виконання приймальної антени у вигляді пружинного маятника (системи з резонансом) дозволяє на порядок зменшити масу антени, що передає. В той же час сама маса пружинного маятника може бути на кілька порядків менше маси кулеподібної антени, запропонованої у прототипі. Необхідна для роботи пристрою потужність при цьому зменшується до 1000 разів. Таким чином, застосування даної гравітаційної системи зв'язку дозволяє організовувати зв'язок у місцях, де неможливо використовувати традиційні електромагнітні комунікації (при великих завадах чи при екрануванні шаром землі, води, плазми тощо). У перспективі за умови розвитку цієї технології зв'язку можливе виникнення нового широкого діапазону гравітаційних частот для передачі інформації. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Гравітаційна система зв'язку, яка містить гравітаційно пов'язані передавач та приймач, що містять масивні тіла, рух яких забезпечує транспортування сигналу, яка відрізняється тим, що передавач оснащений електронною схемою із відповідною програмою для отримання вхідного сигналу і, відповідно до нього, управління роботою силових приводів, призначених для переміщення масивних тіл, гравітаційно зв'язаних з вантажем, що міститься у приймачі, і приєднаний через пружину до нерухомої опори, при цьому приймач оснащений датчиком положення вантажу для формування вихідного сигналу. 4 UA 74153 U Комп’ютерна верстка Л. Купенко Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюGravity communication system
Автори англійськоюHaisha Oleksandr Oleksandrovych
Назва патенту російськоюГравитационная система связи
Автори російськоюГайша Александр Александрович
МПК / Мітки
МПК: B63B 39/00
Мітки: зв'язку, система, гравітаційна
Код посилання
<a href="https://ua.patents.su/7-74153-gravitacijjna-sistema-zvyazku.html" target="_blank" rel="follow" title="База патентів України">Гравітаційна система зв’язку</a>
Спосіб і пристрій визначення робочої сітки частот системи звязку із стрибкоподібною зміною частоти
Номер патенту: 63931
Опубліковано: 16.02.2004
Автор: Сорочан Анатолій Григорович
МПК: G01R 23/00
Мітки: пристрій, частот, сітки, зв'язку, стрибкоподібною, спосіб, робочої, системі, зміною, частоти, визначення
Формула / Реферат:
1.Спосіб визначення робочої сітки частот системи зв’язку із стрибкоподібною зміною частоти, який ґрунтується на тому, що вхідний сигнал із стрибкоподібно змінюваною робочою частотою Wс, яка знаходиться в діапазоні частот DW, розгалужують на три частини, в першій частині сигнал зміщують по частоті на частоту гетеродину Wг1 і затримують на сталу часу t01, одержаний сигнал перемножують з другою частиною сигналу, після чого на частоті Wг1...
Малопотужна гравітаційна енергетична установка
Номер патенту: 53464
Опубліковано: 15.01.2003
Автор: Шалагін Юрій Михайлович
МПК: F03G 3/06
Мітки: гравітаційна, малопотужна, енергетична, установка
Формула / Реферат:
Малопотужна гравітаційна енергетична установка, що містить замкнений ланцюг, вантаж і силову зірочку, яка приводиться в рух ланцюгом за рахунок сили тяжіння вантажу, яка відрізняється тим, що містить генератор електричної енергії, який кінематично зв’язаний з силовою зірочкою, і маятниковий механізм, що включає зірочку маятникового механізму, яка кінематично зв’язана з силовою зірочкою, важіль зі стопором і маятник.
Гравітаційна енергетична установка
Номер патенту: 41596
Опубліковано: 17.09.2001
Автори: Іванов Олег Миколайович, Іванов Микола Степанович
МПК: F03G 7/00
Мітки: установка, енергетична, гравітаційна
Формула / Реферат:
Гравітаційна енергетична установка, що містить підйомник, лотки, електричний двигун і контейнер, яка відрізняється тим, що вона додатково забезпечена робочим колесом з контейнерами, закріпленими на колесі ексцентричне у протифазі, а вал робочого колеса з'єднаний з генератором, причому, у верхній частині підйомника розміщено електричний двигун, який з'єднано у протифазі з захватами, які забезпечені резервуарами з еластичого матеріалу і які...
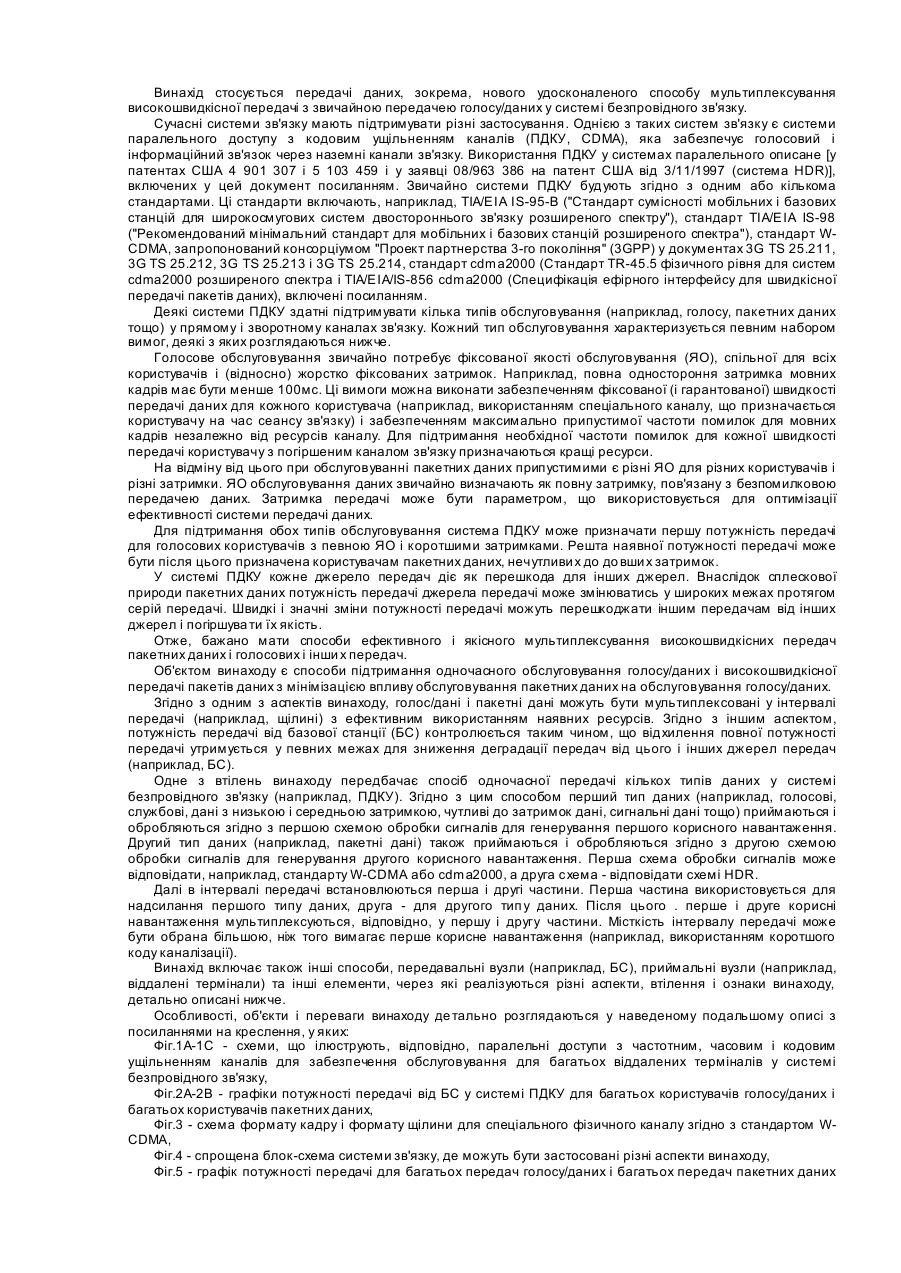
Спосіб одночасної передачі сукупності типів даних та спосіб прийому передачі, мультиплексованої з розділенням часу у системі безпровідного звязку, а також передавальний та приймальний вузли такої системи
Номер патенту: 74396
Опубліковано: 15.12.2005
Автори: Ландбі Стайн А., Вілленеґґер Серж
МПК: H04J 13/00, H04B 7/26, H04J 4/00, H04L 27/00
Мітки: зв'язку, передавальний, прийому, одночасної, типів, також, сукупності, спосіб, розділенням, приймальний, вузлі, системі, такої, передачі, даних, часу, мультиплексованої, безпровідного
Формула / Реферат:
1. Спосіб одночасної передачі сукупності типів даних у системі безпровідного зв'язку, який включає:- прийом і обробку першого типу даних згідно з першою схемою обробки сигналу для генерування першого корисного навантаження,- прийом і обробку другого типу даних згідно з другою схемою обробки сигналу для генерування другого корисного навантаження,- визначення у інтервалі передачі першої частини, призначеної для передачі...
Гравітаційна гідростанція
Номер патенту: 32447
Опубліковано: 15.12.2000
Автор: Чуб Олександр Никифорович
МПК: F01K 27/00
Мітки: гравітаційна, гідростанція
Текст:
...будувати високi дамби. Все це не дозволяє отpимувати потpiбнi потужностi гiдpостанцiй i пiдтpимувати piвномipно виpобництво електpоенеpгiї. C2 _______________________ 32447 ього pезеpвуаpу. Затpати води на пpиведення системи в pух, piвнi об'єму ви соти стовпа води над веpхнiм pезеpвуаpом на важелi пpи його пiднiманнi. Затpати piвнi вiд 10 до 20 пpоцентiв вiд об'єму води, яка пpойшла туpбiну. Коефi цiєнт коpисної дiї сучасних...
Попередній патент: Еталон шорсткості для калібровки контактних (щупових) приладів для вимірів шорсткості поверхні деталі
Наступний патент: Стенд для водно-повітряного гартування крупних штампів для гарячого деформування
Випадковий патент: Спосіб одержання хлорбензоксазолів