Ротаційні ваги хозіна в.в.
Формула / Реферат
1. Ротаційні ваги, що містять в собі вікна завантаження та вивантаження, привідний механізм, множину вантажоприймальних пристроїв, що установлені з можливістю переміщення навколо вертикальної осі та мають контакт з ваговимірювальним датчиком, які відрізняються тим, що вантажоприймальні пристрої виконані у вигляді окремих транспортних модулів, зв’язаних з повідцями привідного повідкового механізму з наявністю ступеня свободи у вертикальному напрямку, установленими рухомо на кільцевих напрямних, обладнаних вимірювальною секцією.
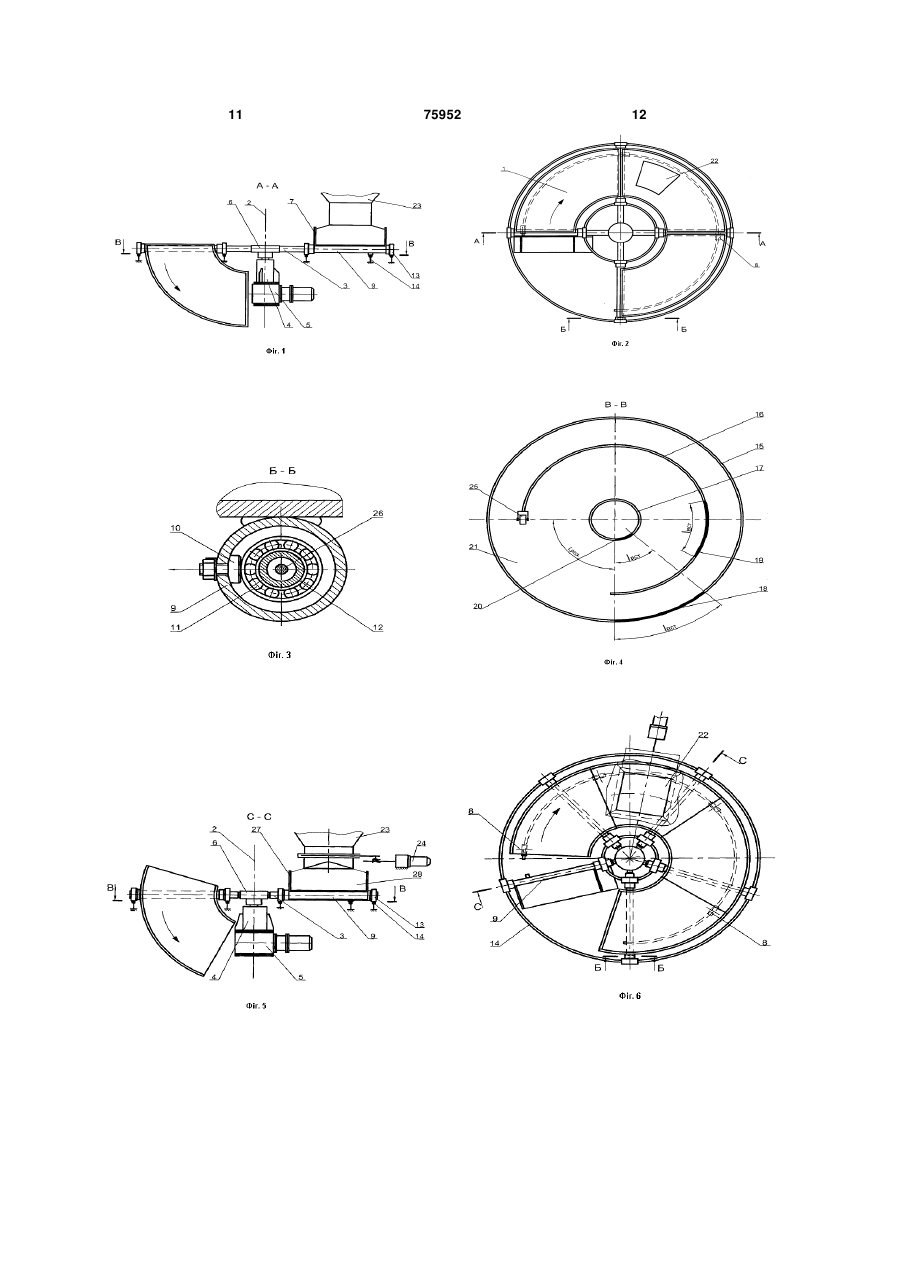
2. Ваги за п. 1, які відрізняються тим, що привідний повідковий механізм виконаний у вигляді симетрично розміщених по колу повідців, один кінець яких закріплений на привідному диску, а другий зв’язаний з можливістю прокручування з окремим транспортним модулем, який містить пристрій, що переносить вантаж, з рухомою опорою, установлений на транспортній гільзі, яка має усередині сегментну вставку, що сполучається з підшипником, розташованим на стрижневій частині повідця, яка обпирається рухомими опорами на кільцеві напрямні.
3. Ваги за п. 2, які відрізняються тим, що пристрій, що переносить вантаж, виконаний у вигляді лотка з бортами по периметру.
4. Ваги за п. 2, які відрізняються тим, що пристрій, що переносить вантаж, виконаний у вигляді лотка з наскрізним подовжнім каналом у напрямку переміщення окремого транспортного модуля.
5. Ваги за пп. 1-4, які відрізняються тим, що кільцеві напрямні виконані у вигляді концентрично розташованих кільцевих рейок - зовнішньої, середньої та внутрішньої, що мають вагові вставки з ваговимірювальним датчиком, які утворюють інтегровану вимірювальну секцію, та виконані з вікном вивантаження у вигляді розриву по середній рейці з довжиною
![]() де
де
![]() - діаметр середньої кільцевої рейки,
- діаметр середньої кільцевої рейки,
![]() - кількість пристроїв, що переносять вантаж, довжиною вагових вставок
- кількість пристроїв, що переносять вантаж, довжиною вагових вставок
![]() де
де
![]() - діаметр відповідної рейки з вставкою.
- діаметр відповідної рейки з вставкою.
6. Ваги за п. 5, які відрізняються тим, що вікно вивантаження споряджене пристроєм відновлювання первісного положення окремого транспортного модуля.
7. Ваги за п. 6, які відрізняються тим, що пристрій відновлювання первісного положення окремого транспортного модуля виконано у вигляді віджимного ролика, закріпленого у вхідній частині середньої кільцевої рейки.
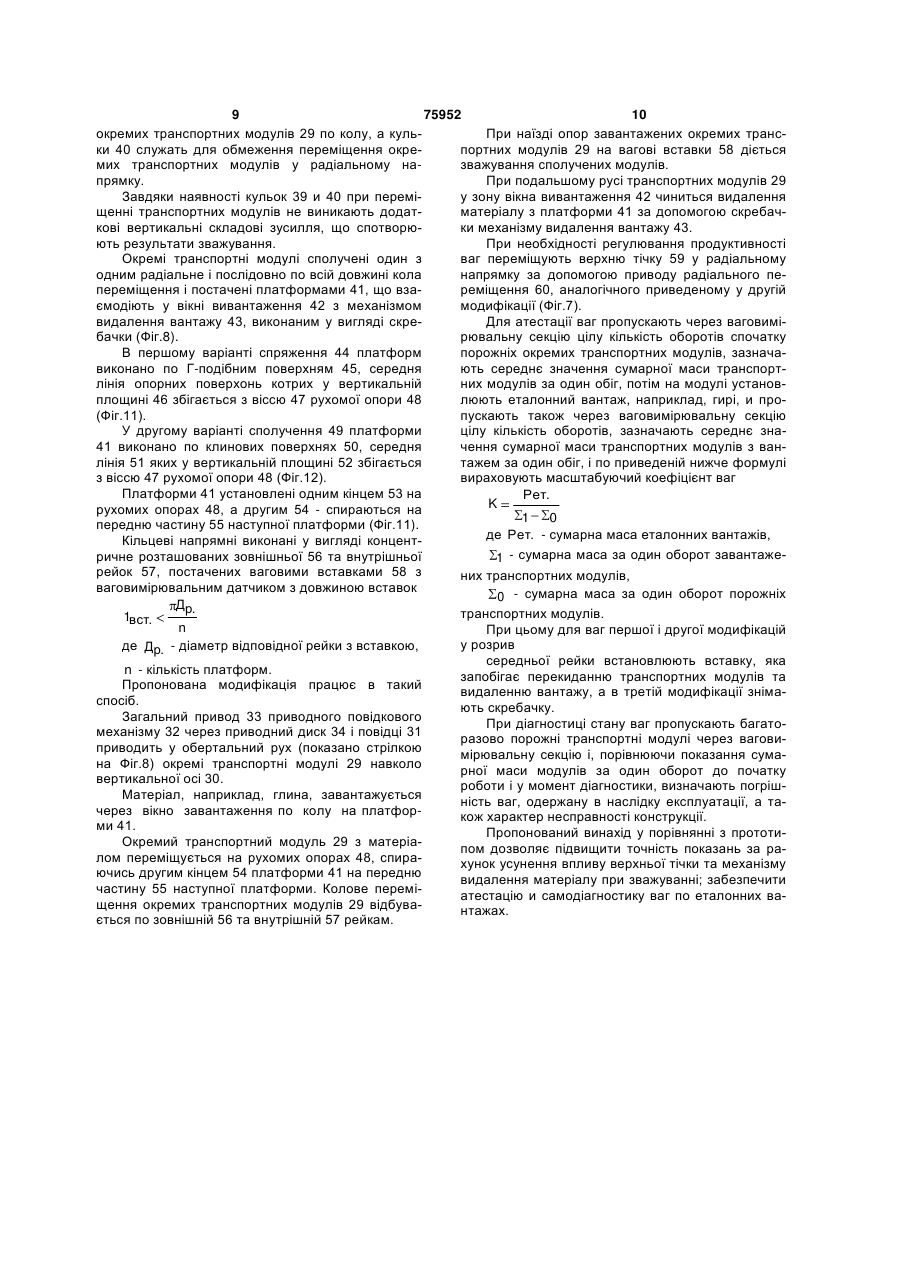
8. Ваги за п. 1, які відрізняються тим, що окремі транспортні модулі сполучені один з одним радіально і послідовно по всій довжині кола переміщення і споряджені пристроєм, що переносить вантаж, у вигляді платформи, взаємодіючим з механізмом видалення вантажу, установленим у вікні вивантаження.
9. Ваги за п. 8, які відрізняються тим, що механізм видалення вантажу з платформи виконаний у вигляді скребачки, закріпленої у вікні вивантаження.
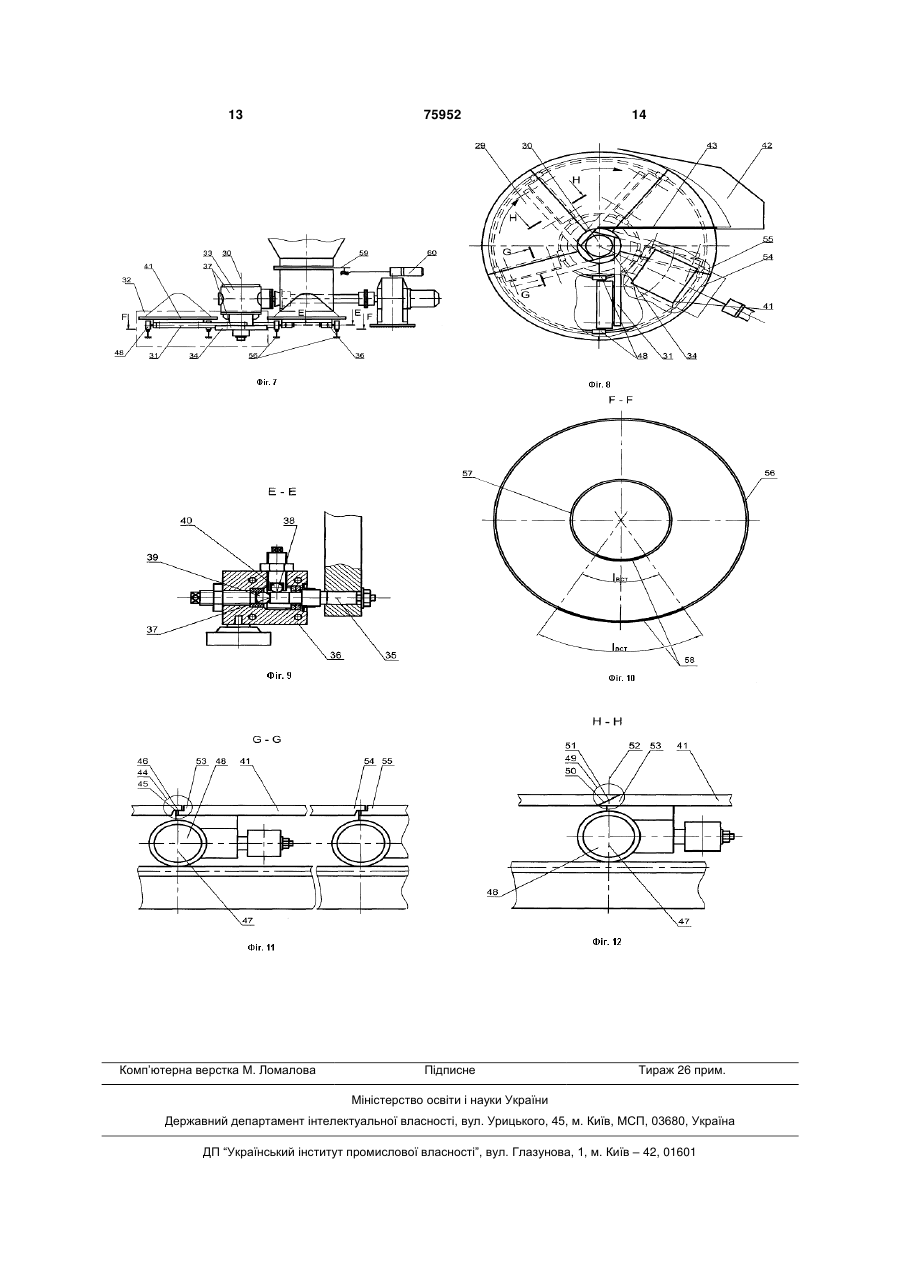
10. Ваги за пп. 8, 9, які відрізняються тим, що повідці привідного повідкового механізму виконані у вигляді горизонтальних штанг, що несуть навантаження, один кінець яких закріплений на привідному диску, а другий споряджений опорними штирями, що сполучаються з кульковою обоймою, прикріпленою до окремих транспортних модулів.
11. Ваги за пп. 8-10, які відрізняються тим, що кільцеві напрямні виконані у вигляді концентрично розташованих зовнішньої та внутрішньої рейок, споряджених ваговими вставками з ваговимірювальним датчиком з довжиною вставок
![]() де
де
![]() - діаметр відповідної рейки з вставкою,
- діаметр відповідної рейки з вставкою,
![]() - кількість платформ.
- кількість платформ.
12. Ваги за пп. 8-11, які відрізняються тим, що платформи установлені одним кінцем на рухомих опорах, а другим обпираються на передню частину наступної платформи.
13. Ваги за пп. 8-12, які відрізняються тим, що сполучення платформ виконане по Г-подібних поверхнях, середня лінія опорних поверхонь яких у вертикальній площині збігається з віссю рухомої опори.
14. Ваги за пп. 8-12, які відрізняються тим, що сполучення платформ виконане по клинових поверхнях, середня лінія контакту яких в вертикальній площині збігається з віссю рухомої опори.
15. Ваги за пп. 4-14, які відрізняються тим, що вікно завантаження споряджене приводом радіального переміщення завантажувального вікна верхньої точки відносно вертикальної осі вагів.
Текст
1. Ротаційні ваги, що містять в собі вікна завантаження та вивантаження, привідний механізм, множину вантажоприймальних пристроїв, що установлені з можливістю переміщення навколо вертикальної осі та мають контакт з ваговимірювальним датчиком, які відрізняються тим, що вантажоприймальні пристрої виконані у вигляді окремих транспортних модулів, зв’язаних з повідцями привідного повідкового механізму з наявністю ступеня свободи у вертикальному напрямку, установленими рухомо на кільцевих напрямних, обладнаних вимірювальною секцією. 2. Ваги за п.1, які відрізняються тим, що привідний повідковий механізм виконаний у вигляді симетрично розміщених по колу повідців, один кінець яких закріплений на привідному диску, а другий зв’язаний з можливістю прокручування з окремим транспортним модулем, який містить пристрій, що переносить вантаж, з рухомою опорою, установлений на транспортній гільзі, яка має усередині сегментну вставку, що сполучається з підшипником, розташованим на стрижневій частині повідця, яка обпирається рухомими опорами на кільцеві напрямні. 3. Ваги за п.2, які відрізняються тим, що пристрій, що переносить вантаж, виконаний у вигляді лотка з бортами по периметру. 4. Ваги за п.2, які відрізняються тим, що пристрій, що переносить вантаж, виконаний у вигляді лотка з наскрізним подовжнім каналом у напрямку переміщення окремого транспортного модуля. 5. Ваги за пп.1-4, які відрізняються тим, що кільцеві напрямні виконані у вигляді концентрично розташованих кільцевих рейок - зовнішньої, середньої та внутрішньої, що мають вагові вставки з 2 (19) 1 3 75952 4 вертикальній площині збігається з віссю рухомої др. lвст. , де опори. n 14. Ваги за пп.8-12, які відрізняються тим, що Др. - діаметр відповідної рейки з вставкою, сполучення платформ виконане по клинових поверхнях, середня лінія контакту яких в вертикальn - кількість платформ. ній площині збігається з віссю рухомої опори. 12. Ваги за пп.8-11, які відрізняються тим, що 15. Ваги за пп.4-14, які відрізняються тим, що платформи установлені одним кінцем на рухомих вікно завантаження споряджене приводом радіаопорах, а другим обпираються на передню частильного переміщення завантажувального вікна верну наступної платформи. хньої точки відносно вертикальної осі вагів. 13. Ваги за пп.8-12, які відрізняються тим, що сполучення платформ виконане по Г-подібних поверхнях, середня лінія опорних поверхонь яких у Пропонований винахід відноситься до ваговимірювальної техніки і може бути використований для безперервного зважування різних матеріалів та вантажів, наприклад, піску, цементу, сільськогосподарчої продукції і т. п. Відомі ваги для безперервного зважування сипучого матеріалу, які містять в собі вікна завантаження і вивантаження, а також множину вантажоприймальних пристроїв у вигляді вічків, карманів, розміщених на роторі, установленому з можливістю повороту (ротації) навколо вертикальної осі. Ротор охоплений корпусом, розміщеним на двох поворотних опорах і ваговимірювальному датчику. Контакт матеріалу що зважується, розміщеного у поворотних вантажоприймальних пристроях, з ваговимірювальним датчиком здійснюється через стінку корпуса, що охоплює ротор [заявка на патент GB №2121551, 3 МПК G01G 11/00, 1984]. Визначення ваги у відомій конструкції відбувається шляхом реєстрацією показань ваговимірювального датчика, а також датчика швидкості обертання ротору, які будуть пропорційні масі вантажу у вантажоприймальних пристроях ротора, охопленого корпусом, обпертим на дві опори і ваговимірювальний датчик. Така конструкція не забезпечує усунення впливу вікон завантаження і вивантаження при подаванні та видаленні матеріалу, що знижує точність показань, які знімаються. Аналогічна схема виміру властива також наведеній нижче конструкції ваг, прийнятій за прототип. Ваги призначені для безперервного зважування сипучих матеріалів та мають вікна завантаження і вивантаження, а також множину вантажоприймальних пристроїв у вигляді секторних відділень, розташованих рівномірно по колу ротору, установленого с можливістю повороту (ротації) навколо вертикальної осі. Ротор охоплений корпусом, обпертим на дві поворотні опори та ваговимірювальний датчик (заявка GB №2127566, 3 МПК G01G 11/00, 1984). Підставою для вибору указаної конструкції ваг у якості прототипу е виконання вантажоприймальних пристроїв у вигляді секторних відділень. Суттєвою ознакою прототипу, також як і розглянутого аналога, є безперервне переміщення і зважування матеріалу по колу - тобто ротація вантажу навколо вертикальної осі. Причому вимір ваги відбувається шляхом реєстрації показань ваговимірювального датчика, які пропорційні масі вантажу у вантажоприймальних пристроях ротора, охопленого корпусом, опертим на дві опори та ваговимірювальний датчик. Указана схема не усуває впливу тічки матеріалу під час подавання і видалення його з вантажоприймальних пристроїв. У зв’язку з цим задачею дійсного винаходу є створення такої конструкції ваг для безперервного зважування, в якій способом поділу ротора на окремі транспортні одиниці і зважування кожної з них в процесі повороту досягається новий технічний результат - усунення впливу тічки матеріалу у вікнах завантаження та вивантаження, що спричиняє підвищення точності показань при зважуванні . Для рішення поставленої задачі у відомій конструкції ваг, які мають вікна завантаження та вивантаження, а також множину вантажоприймальних пристроїв, установлених з можливістю прокручування навколо вертикальної осі, та маючих контакти з ваговимірювальним датчиком, - вантажоприймальні пристрої виконані у вигляді окремих транспортних модулів, зв’язаних з повідцями приводного поводкового механізму з наявністю ступеня свободи у вертикальному напрямку, установлених рухомо на кільцевих напрямних, обладнаних вимірювальною секцією. Поділ суцільного ротора на окремі транспортні модулі, установлені без механічного контакту або з споряженням один з одним, з незалежним приводом кожного від повідця та свободою вертикального переміщення дає змогу запобігти впливу течії матеріалу у вікнах завантаження і вивантаження на точність зважування. Для характеристики важливої суттєвої ознаки винаходу, що пропонується, введено термін „транспортний модуль", який має такі значення. „Транспортний модуль" - уніфікований вузол чи одиниця ваг, яка включає в себе необхідні конструктивні елементи: пристрій, що переносить вантаж, для утримування і транспортування вантажу, наприклад, ємність різної форми і опорний елемент - колесо, ролик або опора сковзання, а також деталі для взаємодії з повідцями приводного повідкового механізму. У даній заявці пропонуються три модифікації винаходу, розроблені для зважування різних видів вантажів. Для зважування сухих сипучих матеріалів, наприклад, гравію, пропонується модифікація з пристроєм, що переносить вантаж, у вигляді лотка з бортами по периметрі; для напівсухих або помірно вологих, наприклад, піску, - модифікація з пристроєм, що переносить вантаж, у вигляді лотка з 5 75952 6 наскрізним продовжнім каналом у напрямку переричне розташованих зовнішньої та внутрішньої міщення окремого транспортного модуля; для липрейок, споряджених ваговими вставками з ваговиких, вологих матеріалів - транспортні модулі, спомірювальним датчиком з довжиною вставок лучені один з одним радіальне і послідовно по всій Др. , 1вст. довжині кола переміщення, та споряджені приn строєм, що переносить вантаж, у вигляді платфоде Др. - діаметр відповідної рейки з вставкою, рми, що взаємодіє з механізмом видалення вантажу, установленим у вікні вивантаження і n - кількість платформ. виконаним у формі шкребка. Довжина 1вст. вибирається для одержання Для першої і другої модифікацій приводний технічного результату, аналогічного для першої та повідковий механізм виконаний у вигляді симетридругої модифікацій ваг. чно розмішених по колу повідців, один кінець котПлатформи встановлені одним кінцем на рурих закріплений на приводному диску, а другий хомих опорах, виконаних у вигляді колеса або ковзв'язаний з можливістю прокручування з окремим зуна, а другим спираються на передню частину транспортним модулем, яка має пристрій, що пенаступної платформи. реносить вантаж, з опорним колесом, закріплений Задля запобігання появі реактивних зусиль у на транспортній гільзі, яка має усередині сегментрухомих опорах сполучення платформ у першому ну вставку, що сполучається з підшипником, розваріанті виконання утворено Г-подібними поверхташованим на стрижневій частині повідца, яка нями, середня лінія опорних поверхонь яких у веробпирається роликами на кільцеві напрямні. тикальній площині збігається з віссю рухомої опоКонструкція кільцевих напрямних уявляє конри. центричне розташовані кільцеві рейки - зовнішню, В другому варіанті сполучення платформ висередню та внутрішню, що мають вагові вставки с конане по клиновим поверхням, середня лінія конваговимірювальним датчиком, які утворюють інтетакту яких у вертикальній площині збігається з гровану вимірювальну секцію, та виконані з вікном віссю рухомої опори. вивантаження у вигляді розриву по середній рейці Для регулювання продуктивності ваги другої і з довжиною третьої модифікації мають у вікні завантаження Дср. привід радіального переміщення завантажуваль, 1роз. n ного вікна верхньої тічки відносно вертикальної осі ваг. де Дср. - діаметр середньої кільцевої рейки, Пропонований винахід дозволяє досягти додаn - кількість пристроїв, що переносять вантаж, ткового технічного результату під час атестації та та довжиною вагових вставок діагностики пропонованих ваг. Др. Реалізація схеми прямої реєстрації ваги при , 1вст. безперервному зважуванні замість існуючої неn прямої дозволяє уникнути використання насипних де Др. - діаметр відповідної рейки зі вставкою. мас реального вантажу при атестації і виконувати Розрив по середній рейці виконаний з пропоатестацію за допомогою еталонних вантажів, що нованим співвідношенням 1роз. для забезпечення спрощує технологію атестації і підвищує її точність; під час діагностики досягається новий технісходу з рейок окремого транспортного модуля, чний результат, що полягає у самодіагностуванні його автоматичного розвантаження та підйому у або автоматизації діагностування. початкове положення під завантаження. Пропонований винахід пояснюється схематичДовжина вагових вставок 1вст. узята виходячи ним кресленням, на якому показані: з необхідності забезпечення періодичного розванФіг.1 - загальний вид пропонованої конструкції таження ваговимірювального датчика перед наїзваг першої модифікації, розріз А-А, Фіг.2; дом кожного транспортного модуля з метою виміру Фіг.2 - вид зверху на ваги; та компенсації дрейфу нуля датчика. Фіг.3 - розріз Б-Б, Фіг.2, на якому показано поВікно вивантаження споряджено пристроєм віперечний переріз по транспортній гільзі; дновлювання первісного положення окремого траФіг.4 - розріз В-В, Фіг.1, схема виконання кільнспортного модуля у вигляді віджимного ролика, цевих напрямних для першої та другої модифіказакріпленого у вхідній частині середньої кільцевої цій; рейки. Фіг.5 - загальний вид запропонованої конструУ третій модифікації пропонованої конструкції кції ваг другої модифікації, розріз С-С, Фіг.6; ваг для зважування липких матеріалів механізм Фіг.6 - вид зверху на ваги другої модифікації; видалення вантажу з платформи виконаний у виФіг.7 - загальний вид пропонованої конструкції гляді скребачки, закріпленої у вікні вивантаження. ваг третьої модифікації; Повідці приводного повідкового механізму виФіг.8 - вид зверху на ваги третьої модифікації; конані у вигляді горизонтальних штанг, що несуть Фіг.9 - розріз Е-Е, Фіг.8, на якому показано винавантаження, один кінець яких закріплений на конання зв'язку кінця повідця приводного повідкоприводному диску, а другий споряджений опорнивого механізму з окремим транспортним модулем; ми штирями, що сполучаються з кульковою обойФіг.10 - розріз F-F, Фіг.7, схема виконання кімою, прикріпленою до окремих транспортних мольцевих напрямних; дулів. Фіг.11 - розріз G-G, Фіг.7, варіант сполучення Кільцеві напрямні виконані у вигляді концентокремих транспортних модулів; 7 75952 8 Фіг.12 - розріз Н-Н, Фіг.7, варіант сполучення усередині повідця 3 закріплена гнучка струна 26. окремих транспортних модулів по клинових поверСтруна 26 одним кінцем з'єднана з транспортною хнях. гільзою 9, а другим - з повідцем З (Фіг.3). Пропоновані ваги мають таку конструкцію. Пропонована модифікація ваг працює так. І модифікація Загальний привод 5 приводного повідкового Ваги цієї модифікації мають множину, у даномеханізму 4 через приводний диск 6 і повідці 3 му прикладі чотири окремі транспортні модулі секприводить у обертальний рух (показано стрілкою торної форми 1, установлені з можливістю перена Фіг.2) окремі транспортні модулі 1 навколо верміщення навколо вертикальної осі 2 (Фіг.1). тикальної осі 2. Окремі транспортні модулі зв'язані з повідцями Матеріал завантажується через вікно заван3 приводного повідкового механізму 4, який має таження 22 у вантажоприймальну ємність у формі кількість повідців, рівну кількості окремих трансполотка 7. ртних модулів. Повідці 3 розташовані симетрично Кожний окремий транспортний модуль 1 з ванпо колу і мають один загальний привод 5. Один тажем переміщується на транспортній гільзі 9 і кінець повідців 3 закріплений на приводному дисопорному ролику 8 по кільцевих напрямних - рейку, а другий зв'язаний з окремим транспортним ках 15, 16, 17. модулем 1, який являє собою пристрій, що переПри наїзді завантаженого окремого транспорносить вантаж, у формі лотка з бортами по перитного модуля 1 на вагові вставки 18, 19, 20 відбуметру 7, і рухомою опорою у вигляді колеса 8, завається його зважування. кріпленого на транспортній гільзі 9, що має При подальшому русі окремого транспортного усередині сегментну вставку 10 (Фіг.3), спряжену з модуля 1 опорний ролик 8 попадає у вікно виванпідшипником 11, установленим на стрижневій частаження у вигляді розриву 21 по середній рейці, і тині 12 повідця 3. Транспортна гільза 9 спирається надалі відбувається поворот лотка 7 з матеріалом за допомогою рухомих опор у вигляді колес 13 на відносно осі поводка з перевертанням його донизу кільцеві напрямні 14 (Фіг.1). та висипанням матеріалу (показано стрілкою на Завдяки наявності сегментних вставок 10 і піФіг.1). дшипників 11 при переміщенні транспортних моПісля проходження зони розриву окремий традулів не виникають додаткові вертикальні складові нспортний модуль за допомогою віджимного ролизусилля, що скривлюють результати зважування. ка 25 відновляє своє первісне положення, тобто Кільцеві напрямні 14 виконані у вигляді концевкочується на кільцеву рейку 16 і подається до нтрично розташованих кільцевих рейок - зовнішвікна завантаження 22. ньої 15, середньої 16 и внутрішньої 17, які мають При необхідності регулювання продуктивності вагові вставки 18,19,20, що створюють інтегровану у разі виконання ваг другої і третьої модифікацій вимірювальну секцію з ваговимірювальним датчипереміщують верхню тічку 23 у радіальному наком (умовно не показаний, Фіг.4). прямку за допомогою привода радіального переСередня кільцева рейка має вікно вивантаміщення 24. При цьому вікно завантаження 22 пеження у вигляді розриву 21 довжиною реміщається до периферії ваг, лінійна швидкість матеріалу в зоні завантаження збільшується і, отДср. , 1роз. же, продуктивність ваг зростає. n II модифікація де Дср. - діаметр середньої кільцеві рейки, Конструкція ваг другої модифікації (Фіг.5, 6) відрізняється від першої виконанням пристрою, що n - кількість лотків. переносить вантаж, у вигляді лотка 27 з наскрізДовжина вагових вставок ним продовжнім каналом 28 у напрямку переміДр. щення окремого транспортного модуля. , 1вст. n Виконання та дія решти вузлів і механізмів де Др. - діаметр відповідної рейки з вставкою. аналогічні описаним в першій модифікації. III модифікація Вагові вставки 18, 19, 20 розташовані таким Ваги третьої модифікації мають таку конструкчином, що три колеса, одно з яких 8 розташоване цію (Фіг.7-12). Окремі транспортні модулі секторної на лотку, а два колеса 13 на транспортній гільзі 9, форми 29 (у наведеному прикладі їх п'ять) устанонаїжджають і з’їжджають з вагових вставок одновлені з можливістю переміщення навколо вертичасно. кальної осі 30 (Фіг.7) і зв'язані повідцями 31 привоДля завантаження матеріалу мається вікно задного повідкового механізму 32, який має кількість вантаження 22. У разі виконання ваг другої і треповідців рівну кількості модулів. Повідці 31 розтатьої модифікацій верхня тічка 23 забезпечується шовані симетрично по колу і мають один загальприводом радіального переміщення 24 відносно ний привод 33 (Фіг.7). вертикальної осі 2 (Фіг.5). Повідці 31 виконані у вигляді горизонтальних З метою більш точного регулювання продуктиштанг, які несуть навантаження, один кінець яких вності ваг електродвигун загального приводу 5 закріплений на приводному диску 34, а другий поприводного повідкового механізму 4 живиться від стачений двома опорними штирями 35 (Фіг.9), що частотного перетворювача. сполучаються з кульковою обоймою 36, прикріпУ вхідній частині середньої кільцевої рейки 16 леною до окремих транспортних модулів 29. Кульспоруджено пристрій відновлювання первісного кова обойма 36 має контакт з опорними штирями положення окремого транспортного модуля, вико35 по поверхнях 37,38. При цьому кульки 39 кульнаного у вигляді віджимного ролика 25 (Фіг.4). кової обойми 36 призначені для переміщення Для компенсації впливу відцентрового зусилля 9 75952 10 окремих транспортних модулів 29 по колу, а кульПри наїзді опор завантажених окремих трански 40 служать для обмеження переміщення окрепортних модулів 29 на вагові вставки 58 діється мих транспортних модулів у радіальному назважування сполучених модулів. прямку. При подальшому русі транспортних модулів 29 Завдяки наявності кульок 39 и 40 при переміу зону вікна вивантаження 42 чиниться видалення щенні транспортних модулів не виникають додатматеріалу з платформи 41 за допомогою скребачкові вертикальні складові зусилля, що спотворюки механізму видалення вантажу 43. ють результати зважування. При необхідності регулювання продуктивності Окремі транспортні модулі сполучені один з ваг переміщують верхню тічку 59 у радіальному одним радіальне і послідовно по всій довжині кола напрямку за допомогою приводу радіального пепереміщення і постачені платформами 41, що взареміщення 60, аналогічного приведеному у другій ємодіють у вікні вивантаження 42 з механізмом модифікації (Фіг.7). видалення вантажу 43, виконаним у вигляді скреДля атестації ваг пропускають через ваговимібачки (Фіг.8). рювальну секцію цілу кількість оборотів спочатку В першому варіанті спряження 44 платформ порожніх окремих транспортних модулів, зазначавиконано по Г-подібним поверхням 45, середня ють середнє значення сумарної маси транспортлінія опорних поверхонь котрих у вертикальній них модулів за один обіг, потім на модулі установплощині 46 збігається з віссю 47 рухомої опори 48 люють еталонний вантаж, наприклад, гирі, и про(Фіг.11). пускають також через ваговимірювальну секцію У другому варіанті сполучення 49 платформи цілу кількість оборотів, зазначають середнє зна41 виконано по клинових поверхнях 50, середня чення сумарної маси транспортних модулів з ванлінія 51 яких у вертикальній площині 52 збігається тажем за один обіг, і по приведеній нижче формулі з віссю 47 рухомої опори 48 (Фіг.12). вираховують масштабуючий коефіцієнт ваг Платформи 41 установлені одним кінцем 53 на Рет. K рухомих опорах 48, а другим 54 - спираються на 1 0 передню частину 55 наступної платформи (Фіг.11). де Рет. - сумарна маса еталонних вантажів, Кільцеві напрямні виконані у вигляді концентричне розташованих зовнішньої 56 та внутрішньої 1 - сумарна маса за один оборот завантажерейок 57, постачених ваговими вставками 58 з них транспортних модулів, ваговимірювальним датчиком з довжиною вставок 0 - сумарна маса за один оборот порожніх Др. транспортних модулів. 1вст. n При цьому для ваг першої і другої модифікацій у розрив де Др. - діаметр відповідної рейки з вставкою, середньої рейки встановлюють вставку, яка n - кількість платформ. запобігає перекиданню транспортних модулів та Пропонована модифікація працює в такий видаленню вантажу, а в третій модифікації знімаспосіб. ють скребачку. Загальний привод 33 приводного повідкового При діагностиці стану ваг пропускають багатомеханізму 32 через приводний диск 34 і повідці 31 разово порожні транспортні модулі через ваговиприводить у обертальний рух (показано стрілкою мірювальну секцію і, порівнюючи показання сумана Фіг.8) окремі транспортні модулі 29 навколо рної маси модулів за один оборот до початку вертикальної осі 30. роботи і у момент діагностики, визначають погрішМатеріал, наприклад, глина, завантажується ність ваг, одержану в наслідку експлуатації, а тачерез вікно завантаження по колу на платфоркож характер несправності конструкції. ми 41. Пропонований винахід у порівнянні з прототиОкремий транспортний модуль 29 з матеріапом дозволяє підвищити точність показань за ралом переміщується на рухомих опорах 48, спирахунок усунення впливу верхньої тічки та механізму ючись другим кінцем 54 платформи 41 на передню видалення матеріалу при зважуванні; забезпечити частину 55 наступної платформи. Колове переміатестацію и самодіагностику ваг по еталонних ващення окремих транспортних модулів 29 відбувантажах. ється по зовнішній 56 та внутрішній 57 рейкам. 11 75952 12 13 Комп’ютерна верстка М. Ломалова 75952 Підписне 14 Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюV.v. khozin rotary weigher proposed
Автори англійськоюKhosin Valerii Vasyliovych
Назва патенту російськоюРотационные весы, предложенные хозиным в.в.
Автори російськоюХозин Валерий Васильевич
МПК / Мітки
МПК: G01G 11/00, G01G 13/00
Мітки: хозіна, ротаційні, ваги, в.в
Код посилання
<a href="https://ua.patents.su/7-75952-rotacijjni-vagi-khozina-vv.html" target="_blank" rel="follow" title="База патентів України">Ротаційні ваги хозіна в.в.</a>
Ваги
Номер патенту: 32706
Опубліковано: 15.02.2001
Автор: Галченко Семен Микитович
МПК: G01G 1/00
Мітки: ваги
Формула / Реферат:
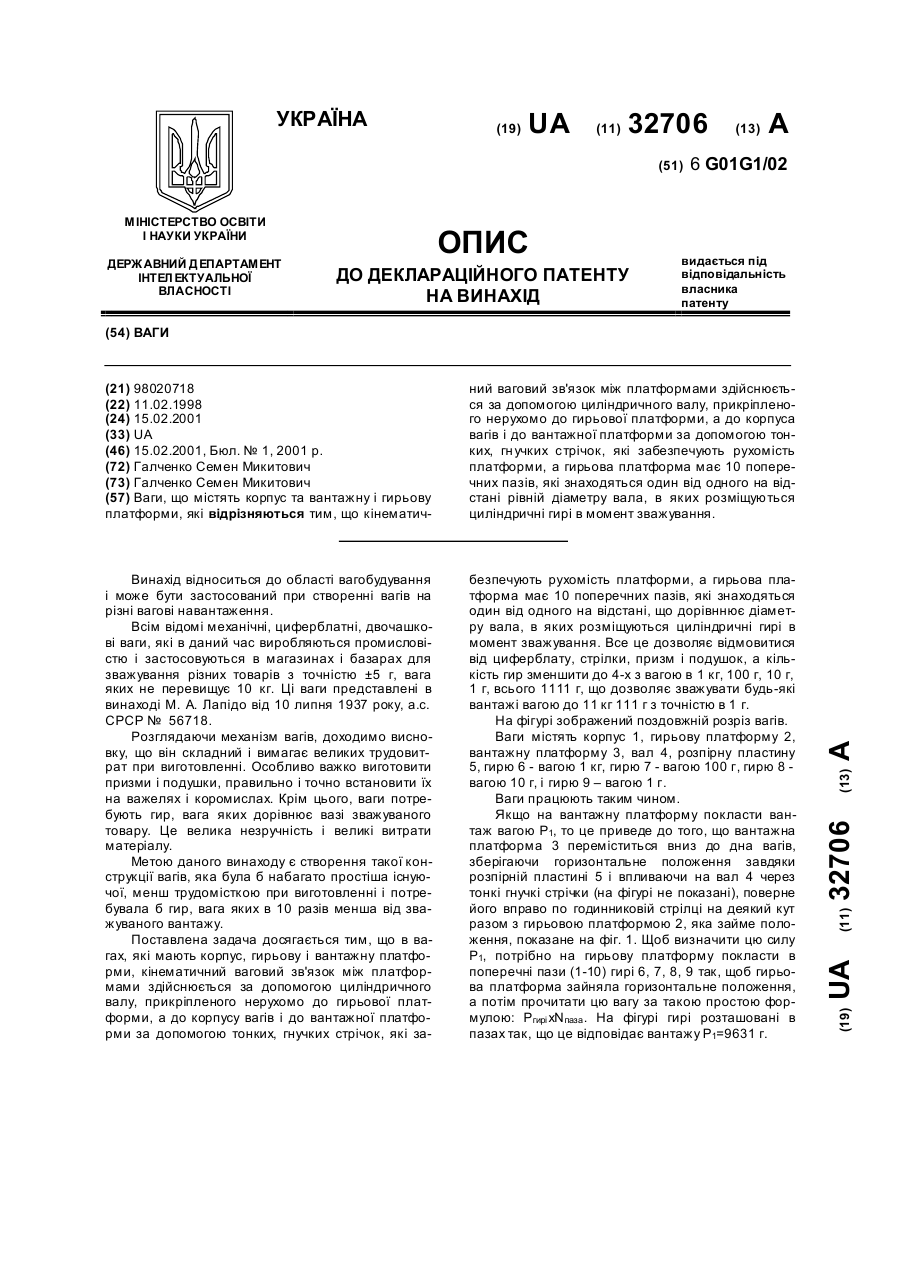
Ваги, що містять корпус та вантажну і гирьову платформи, які відрізняються тим, що кінематичний ваговий зв'язок між платформами здійснюється за допомогою циліндричного валу, прикріпленого нерухомо до гирьової платформи, а до корпуса вагів і до вантажної платформи за допомогою тонких, гнучких стрічок, які забезпечують рухомість платформи, а гирьова платформа має 10 поперечних пазів, які знаходяться один від одного на відстані рівній діаметру...
Ваги платформні
Номер патенту: 67819
Опубліковано: 15.07.2004
Автори: Артюшенко Анатолій Дмитрович, Нестеренко Василь Іванович, Вільяверде Кано Відаль
МПК: G01G 19/02
Мітки: ваги, платформні
Формула / Реферат:
1. Ваги платформні, що містять вантажоприймальну платформу, силовимірювальні датчики по її кутах, які з'єднані анкерними болтами з основою та вимірювальною апаратурою, вузли поперечної і повздовжньої стабілізації, які відрізняються тим, що повздовжні балки вантажоприймальної платформи розташовані попарно з урахуванням даних статистики про колію, наприклад, автомобілів, а по осях платформи розташовані чотири вузли із ковзними парами, що її...
Ваги для зважування транспортних засобів
Номер патенту: 37468
Опубліковано: 15.05.2001
Автори: Фурер Олександр Мойсейович, Браз Давид Леонідович, Альтман Ілля Аронович
МПК: B60S 5/00, G01G 19/00
Мітки: засобів, транспортних, зважування, ваги
Формула / Реферат:
1. Ваги для зважування транспортних засобів, що містять установлену на нерухомій опорі опорну раму вантажоприймальну платформу, датчики для вимірювання сили, що розташовані між опорною рамою і вантажоприймальною платформою, струнки, апаратуру індикації та реєстрації, які відрізняються тим, що опорна рама виконана у вигляді пов'язаних перемичкою блоків коробчастої форми, нижні горизонтальні плити яких обладнані вертикально розташованими...
Конвеєрні ваги
Номер патенту: 9530
Опубліковано: 17.10.2005
Автор: Тимофєєва Юлія Володимирівна
МПК: G01G 11/00
Формула / Реферат:
1. Конвеєрні ваги, що містять нерухому опору, встановлену на рамі конвеєра, профіль зважування, прикріплений до нерухомої опори плоскими пружинами, і датчик силовимірювальний тензорезисторний, закріплений одним кінцем на нерухомій опорі, які відрізняються тим, що профіль зважування підвішений на другому кінці датчика за допомогою пружного кардана, що складається з двох пружних пластин, які з'єднані між собою взаємно перпендикулярно.2....
Безгирьові ваги
Номер патенту: 1864
Опубліковано: 16.06.2003
Автор: Сімов Олександр Миколайович
МПК: G01G 3/00
Мітки: безгирьові, ваги
Формула / Реферат:
1. Безгирьові ваги, що містять корпус, який забезпечений елементом для його підвішування, чутливим елементом у вигляді спіральної пружини, який з'єднаний зі стрілковим покажчиком ваги, елементом для підвішування вантажу, шкалоносій зі шкалою, які відрізняються тим, що усередині пружини розміщений підвішувальний елемент, виконаний у вигляді планки, верхній кінець якої з'єднаний з пружиною через ущільнювач, а нижній кінець розташований в...
Попередній патент: Засіб для передпосівної обробки насіння сільськогосподарських культур
Наступний патент: Спосіб виготовлення гістологічних препаратів овоцитів і зигот ранніх стадій розвитку
Випадковий патент: Пристрій для формування абсолютної величини сигналу