Система високоточного визначення координат на основі супутникових радіонавігаційних систем
Номер патенту: 78185
Опубліковано: 11.03.2013
Автори: Савченко Олексій Володимирович, Куценко Олександр Вікторович, Вишнякова Євгенія Вікторівна, Васильєв Ігор Васильович, Ільницька Світлана Іванівна, Трикоз Валерій Павлович, Кондратюк Василь Михайлович, Харченко Володимир Петрович, Кондратюк Марина Василівна
Формула / Реферат
Система високоточного визначення координат на основі супутникової радіонавігації, що містить центр обробки та зв'язку, до складу якого входить термінальний блок для централізованого та віддаленого управління роботою блока управління роверної станції та інтегрованого блока управління та зв'язку базових станцій, блок аналізу та обробки для отримання високоточного координатного рішення в пост обробці, блок контролю якості для перевірки первинних навігаційних вимірювань і комунікаційний сервер в IP-VPN мережі зв'язку для встановлення зв'язку між множиною приладів, що містять в собі GPS-приймачі, до яких належать базові та роверні станції, базову станцію, що передає коригувальні дані, роверну станцію, що отримує коригувальні дані; базова станція містить в собі плату GPS-приймача для отримання сигналів від штучних супутників та інтегрований блок управління та зв'язку, а роверна станція містить в собі плату GPS-приймача для отримання сигналів від штучних супутників, блок зв'язку, блок запису даних і контролю якості та блок управління, що забезпечує роботу плати GPS-приймача, блока зв'язку та блока запису даних і контролю якості; блок управління роверної станції здатний отримувати інформацію про перешкоди від базової станції, що автоматично генерується та реєструється в інтегрованому блоці управління та зв'язку кожної базової станції, і після цього вибирати з множини базових станцій ту, котра передає найбільш підходящі корекції, яка відрізняється тим що в неї додатково введений блок контролю якості, перший вхід якого з'єднаний з комунікаційним сервером, а другий - з блоком аналізу та обробки, а також центр обробки та зв'язку, який об'єднує в собі комунікаційний сервер, вищеназваний блок контролю якості, блок аналізу та обробки і термінальний блок, крім того, до складу роверної станції введено блок запису і контролю якості для запису і контролю первинних даних та запису даних, отриманих з блока аналізу та обробки координатних визначень в режимі on-line, також на базовій станції блоки управління та зв'язку об'єднані в єдиний інтегрований блок управління та зв'язку.
Текст
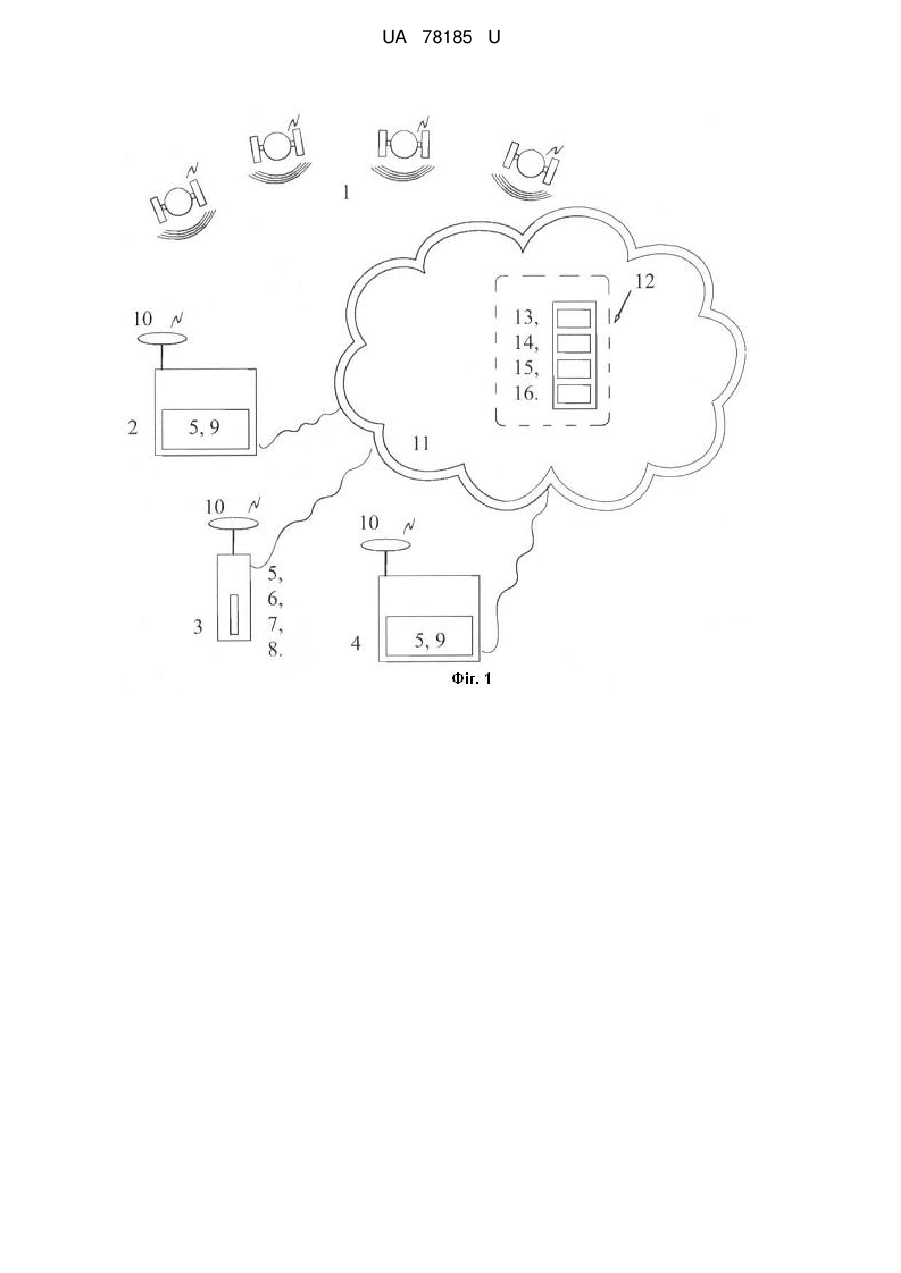
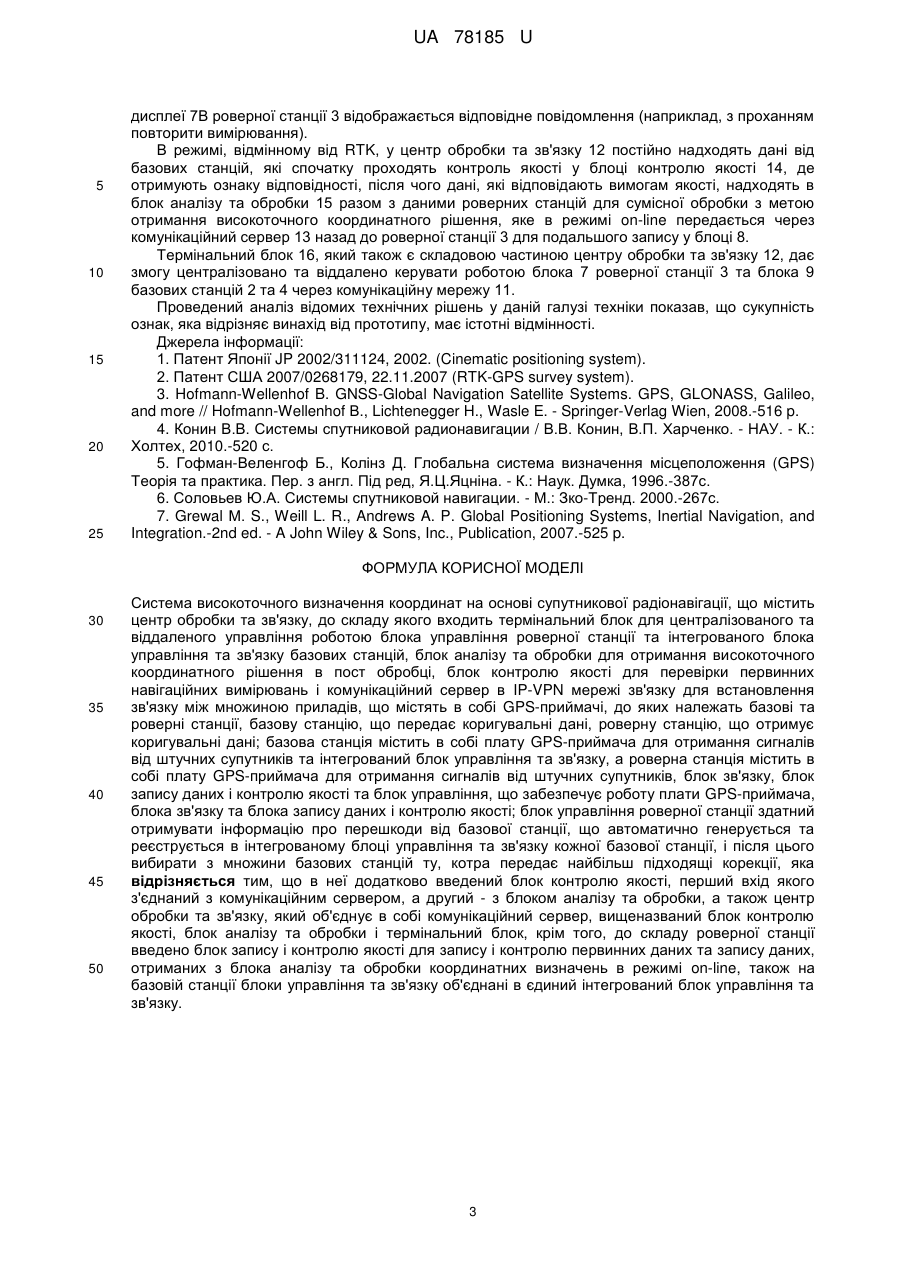
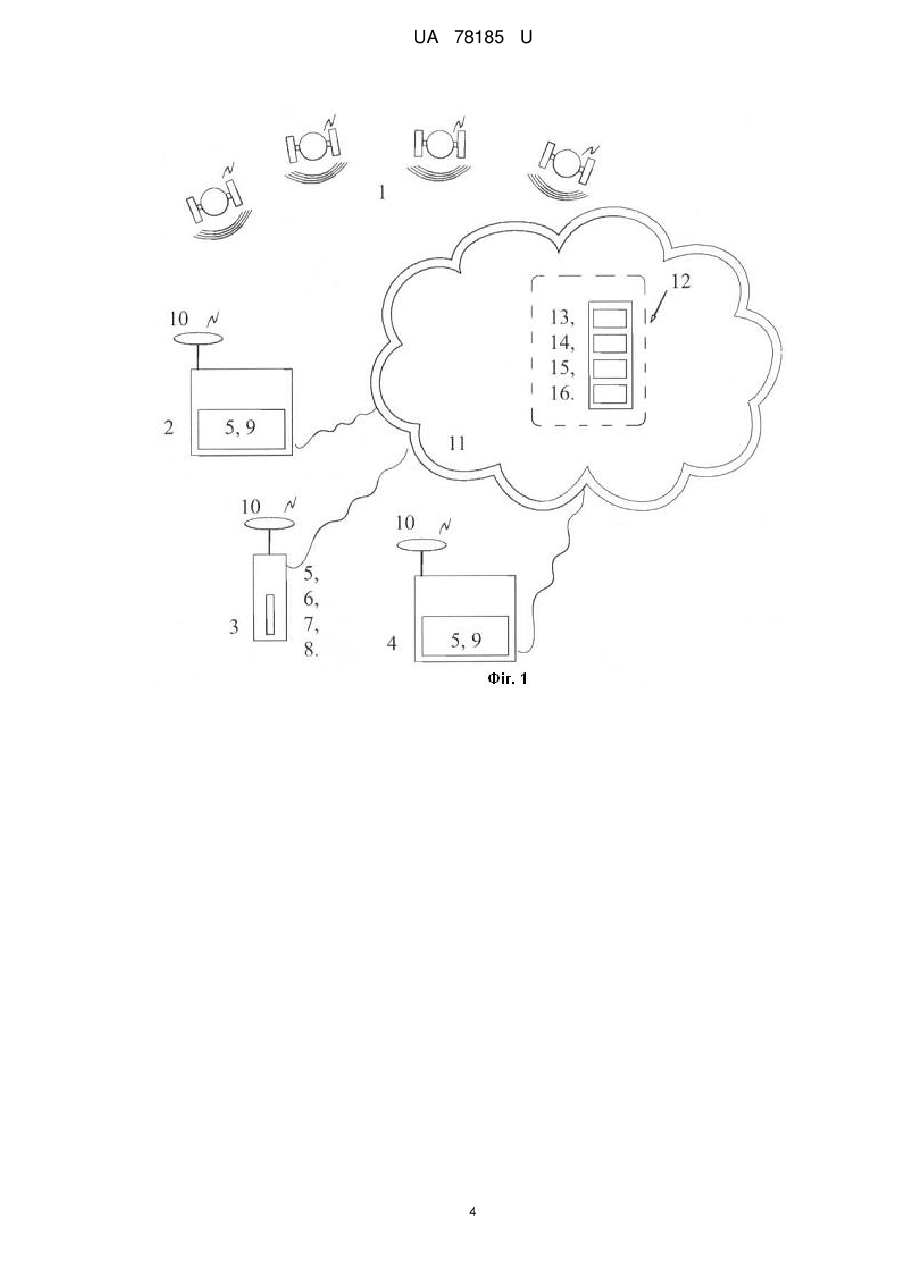
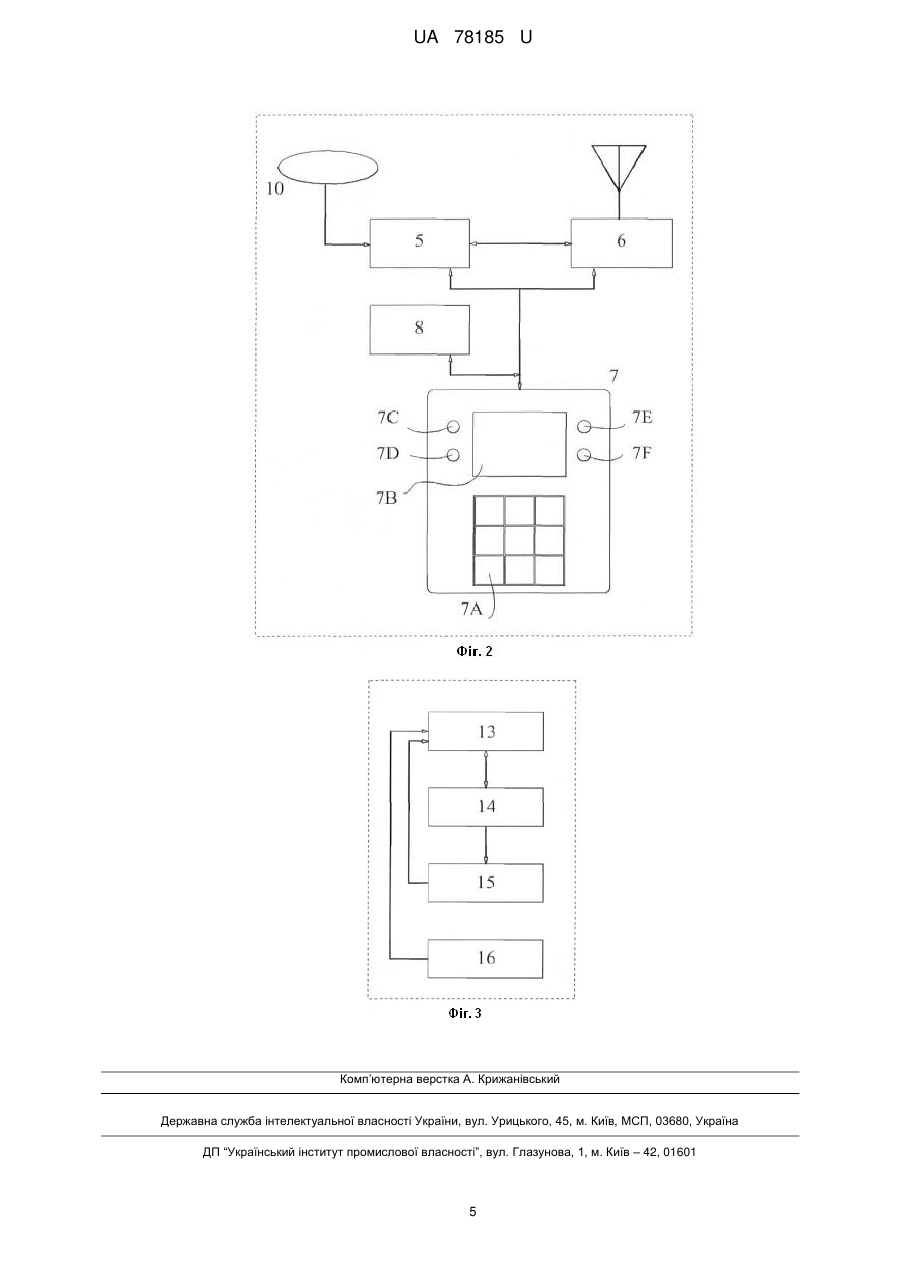
Реферат: Система високоточного визначення координат на основі супутникової радіонавігації містить центр обробки та зв'язку, до складу якого входить термінальний блок; блок аналізу та обробки; блок контролю якості і комунікаційний сервер в IP-VPN мережі зв'язку; для встановлення зв'язку між множиною приладів, що містять в собі GPS-приймачі, до яких належать базові та роверні станції. UA 78185 U (12) UA 78185 U UA 78185 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до області радіонавігації та обчислювальної техніки, що застосовується в геодезії та земельному кадастрі для високоточних координатних визначень, а також для побудови геоінфомаційних систем (ГІС). Відома кінематична система позиціонування (RTK-GPS система координатних визначень), що використовує сигнали від штучних супутників Землі (ШСЗ), таких як GPS, які отримуються приймачем, що дозволяє визначити координати поточного місцеположення об'єкта [1]. Тут присутні базові станції, координати місцезнаходження яких геодезично прив'язані і точно відомі. Таким чином, роверні станції, використовуючи корекції від базових станцій через радіоканал та сигнали від GPS супутників з власних приймачів, отримують спільні координатні визначення. До недоліків відомої системи можна віднести те, що радіозв'язок обмежений за напрямом в один бік від базових станцій до роверної станції, і потребує додаткових налаштувань від роверної станції для налаштування на індивідуальні частоти базових станцій при знаходженні на межі їх робочих зон, які було усунено в системі [2]. Найбільш близькою за технічною суттю до запропонованої системи є система RTK-GPS координатних визначень з використанням глобальної супутникової системи радіонавігації [2]. Відома система, що вибрана як прототип, включає в себе: сервер в IP-VPN мережі зв'язку для встановлення зв'язку між множиною приладів, що містять в собі GPS-приймачі, до яких належать базові та роверні станції, базову станцію, що передає коригувальні дані, роверну станцію, що отримує коригувальні дані; тут базові та роверні станції містять в собі плату GPSприймача для отримання сигналів від штучних супутників, блок зв'язку для встановлення зв'язку між собою та блок управління для управління роботою плати GPS-приймача та блока зв'язку; тут блок управління роверної станції здатний отримувати інформацію про перешкоди, що зареєстрована в блоці управління плати GPS-приймача базових станцій, та вибирати з множини базових станцій ту, яка буде передавати найбільш підходящі корекції; блок управління базової станції в свою чергу включає прилад для оцінки на карті траєкторій руху супутників тих зон, де відношення сигнал/шум отриманого сигналу нижче за еталонну величину, і, відповідно, блок управління роверної станції при виконанні RTK-GPS обробки не враховує ті коригувальні дані, що базуються на сигналах від штучних супутників, що знаходяться у такій зоні. В RTK-GPS системі координатних визначень базова станція розміщена стаціонарно на заздалегідь відомій точці, виміряній з високою точністю. Координати роверної станції невідомі, їх потрібно знайти. Базова станція передає дані спостереження роверній станції, таким чином роверна станція R виконує аналіз та обробку відносно базової станції В в реальному режимі часу одночасно із прийомом сигналів від штучних супутників. Радіус зони, в межах якої роверна станція R може посилатись на окрему базову станцію В (тут згадується під назвою як робоча зона базової станції), складає близько 10 км з базовою станцією В в центрі. Основними недоліками прототипу є: обмеженість зони отримання високоточних вимірювань 10-ттю кілометрами та відсутність контролю якості отриманих координатних визначень. В основу корисної моделі поставлено задачу удосконалення системи RTK-GPS координатних визначень з використанням сигналів супутникової радіонавігаційної системи шляхом розширення робочої зони отримання високоточних координатних визначень до 50 км, забезпечення контролю якості отриманих на роверній станції координатних визначень. Поставлена задача удосконалити винахід вирішується тим, що система високоточного визначення координат на основі супутникової радіонавігації містить центр обробки та зв'язку, до складу якого входить термінальний блок для централізованого та віддаленого управління роботою блока управління роверної станції та інтегрованого блока управління та зв'язку базових станцій, блок аналізу та обробки для отримання високоточного координатного рішення в пост обробці, блок контролю якості для перевірки первинних навігаційних вимірювань і комунікаційний сервер в IP-VPN мережі зв'язку для встановлення зв'язку між множиною приладів, що містять в собі GPS-приймачі, до яких належать базові та роверні станції, базову станцію, що передає коригувальні дані, роверну станцію, що отримує коригувальні дані; базова станція містить плату GPS-приймача для отримання сигналів від штучних супутників та інтегрований блок управління та зв'язку, а роверна станція містить плату GPS-приймача для отримання сигналів від штучних супутників, блок зв'язку, блок запису даних і контролю якості та блок управління, що забезпечує роботу плати GPS-приймача, блока зв'язку та блока запису даних і контролю якості; блок управління роверної станції здатний отримувати інформацію про перешкоди від базової станції, що автоматично генерується та реєструється в інтегрованому блоці управління та зв'язку кожної базової станції та вибирати з множини базових станцій ту, котра передає найбільш підходящі корекції. 1 UA 78185 U 5 10 15 20 25 30 35 40 45 50 55 60 Згідно з корисною моделлю додатково введений блок контролю якості, перший вхід якого з'єднаний з комунікаційним сервером, а другий - з блоком аналізу та обробки, а також центр обробки та зв'язку, який об'єднує в собі комунікаційний сервер, вищеназваний блок контролю якості, блок аналізу та обробки і термінальний блок, крім того, до складу роверної станції введено блок запису і контролю якості для запису і контролю первинних даних та запису даних, отриманих з блока аналізу та обробки координатних визначень в режимі on-line, також на базовій станції блоки управління та зв'язку об'єднані в єдиний інтегрований блок управління та зв'язку. На фіг. 1 наведено загальну схему системи високоточного визначення координат на основі супутникової радіонавігації. Згідно з кресленням дана система містить: m навігаційних ШСЗ глобальної навігаційної супутникової системи радіонавігації 1, дві базові станції 2 та 4, роверну станцію 3, GPS-приймач 5, блок зв'язку 6, блок управління 7, блок запису і контролю якості 8, інтегрований блок управління та зв'язку 9, антену GPS-приймача 10, комунікаційну мережу 11, центр обробки та зв'язку 12. На фіг. 2 наведено структурну схему роверної станції, яка включає в себе GPS-приймач 5, блок зв'язку 6, блок управління 7, що складається з клавіатури 7 А, екрана 7В, індикатора живлення 7С, індикатора зв'язку (GSM, наприклад) 7D, індикатора роботи GPS-приймача 7Е, індикатора запису 7F, та блок запису і контролю якості 8. На фіг. 3 зображено структурну схему центру обробки та зв'язку. Згідно з кресленням даний центр містить: комунікаційний сервер 13, блок аналізу та обробки 14, блок контролю якості 15, термінальний блок 16. Порівняльний аналіз показує, що запропонована система високоточного визначення координат на основі супутникової радіонавігації відрізняється від прототипу "RTK-GPS система координатних визначень" наявністю нових блоків і нових зв'язків між елементами системи, які забезпечують нові якісні властивості. Таким чином, запропонована система має розширену зону дії та забезпечує контроль якості координатних визначень у будь-який проміжок часу. Система працює наступним чином. У відповідності з загальною процедурою координатних визначень в режимі RTK роверна станція знаходиться у точці, координати якої невідомі, а базова станція - у точці з відомими координатами, виміряними заздалегідь із високою точністю. Основні принципи визначення координат за допомогою глобальних навігаційних супутникових систем з використанням опорних пунктів, місцеположення яких геодезично прив'язане і відоме, широко висвітлені в науково-технічній літературі [3-7]. Спочатку виконується процес ініціалізації роверної та базової станцій. Надалі виконується входження до мережі 11 з виконанням процедури авторизації доступу та додаткової ідентифікації за власними ID кодами, що виконується сервером 13, з метою визначення можливості надання доступу. Після завершення процедур авторизації та ідентифікації з обох сторін (базової та роверної станцій) може бути розпочатий процес передавання та отримання поправок шляхом виконання відповідних запитів, що передаються комунікаційною мережею 11. Згідно з планом вимірювань роверна станція розміщується в робочій точці і отримує сигнали від ШСЗ 1. Після налаштування роверної станції на роботу з мережею 11 на дисплей 7В блока управління 7 подається перелік усіх базових станцій, звідки можна отримувати корекції. Оператор роверної станції вибирає з наведеного переліку одну базову станцію, виходячи з міркувань про доцільність отримання поправки саме звідти. Поправки з вибраної базової станції подаються на роверну станцію через центр обробки та зв'язку 12, до складу якого входить комунікаційний сервер 13, блок контролю якості 14, блок аналізу та обробки 15 та термінальний блок 16, комунікаційною мережею 11. Тобто в режимі нормальної роботи RTK режиму центр обробки та зв'язку 12 працює в стандартному режимі. Пристрій для аналізу та обробки, що є складовою блока 7 роверної станції 3, аналізує отримані корекції разом із даними з власного приймача для зниження похибки координатних визначень. Така корекція дозволяє підвищити точність координатних визначень до 10 мм. Отриманий результат записується в пам'ять блока управління 7, що входить до складу роверної станції 3. Після закінчення роботи накопичені дані можуть використовуватись в пост-обробці, яка здійснюється на іншому обладнанні. Якщо роверна станція з певних причин (наприклад, вихід за межі робочої зони базової станції в 10 км) не може отримувати високоточні координатні визначення в RTK режимі, то вона автоматично переходить в режим запису і контролю якості первинних вимірювань у блоці 8. Записані дані проходять контроль якості у цьому ж блоці 8, після чого або, якщо дані задовольняють вимогам, передаються через блок зв'язку 6 в режимі on-line на центр обробки та зв'язку 12 через комунікаційний сервер 13, що входить до складу комунікаційної мережі 11, для подальшої їх обробки у блоці 15, або, якщо дані не задовольняють поставленим вимогам, то на 2 UA 78185 U 5 10 15 20 25 дисплеї 7В роверної станції 3 відображається відповідне повідомлення (наприклад, з проханням повторити вимірювання). В режимі, відмінному від RTK, у центр обробки та зв'язку 12 постійно надходять дані від базових станцій, які спочатку проходять контроль якості у блоці контролю якості 14, де отримують ознаку відповідності, після чого дані, які відповідають вимогам якості, надходять в блок аналізу та обробки 15 разом з даними роверних станцій для сумісної обробки з метою отримання високоточного координатного рішення, яке в режимі on-line передається через комунікаційний сервер 13 назад до роверної станції 3 для подальшого запису у блоці 8. Термінальний блок 16, який також є складовою частиною центру обробки та зв'язку 12, дає змогу централізовано та віддалено керувати роботою блока 7 роверної станції 3 та блока 9 базових станцій 2 та 4 через комунікаційну мережу 11. Проведений аналіз відомих технічних рішень у даній галузі техніки показав, що сукупність ознак, яка відрізняє винахід від прототипу, має істотні відмінності. Джерела інформації: 1. Патент Японії JP 2002/311124, 2002. (Cinematic positioning system). 2. Патент США 2007/0268179, 22.11.2007 (RTK-GPS survey system). 3. Hofmann-Wellenhof B. GNSS-Global Navigation Satellite Systems. GPS, GLONASS, Galileo, and more // Hofmann-Wellenhof В., Lichtenegger H., Wasle E. - Springer-Verlag Wien, 2008.-516 p. 4. Конин В.В. Системы спутниковой радионавигации / В.В. Конин, В.П. Харченко. - НАУ. - К.: Холтех, 2010.-520 с. 5. Гофман-Веленгоф Б., Колінз Д. Глобальна система визначення місцеположення (GPS) Теорія та практика. Пер. з англ. Під ред, Я.Ц.Яцніна. - К.: Наук. Думка, 1996.-387с. 6. Соловьев Ю.А. Системы спутниковой навигации. - М.: Зко-Тренд. 2000.-267с. 7. Grewal М. S., Weill L. R., Andrews A. P. Global Positioning Systems, Inertial Navigation, and Integration.-2nd ed. - A John Wiley & Sons, Inc., Publication, 2007.-525 p. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 30 35 40 45 50 Система високоточного визначення координат на основі супутникової радіонавігації, що містить центр обробки та зв'язку, до складу якого входить термінальний блок для централізованого та віддаленого управління роботою блока управління роверної станції та інтегрованого блока управління та зв'язку базових станцій, блок аналізу та обробки для отримання високоточного координатного рішення в пост обробці, блок контролю якості для перевірки первинних навігаційних вимірювань і комунікаційний сервер в IP-VPN мережі зв'язку для встановлення зв'язку між множиною приладів, що містять в собі GPS-приймачі, до яких належать базові та роверні станції, базову станцію, що передає коригувальні дані, роверну станцію, що отримує коригувальні дані; базова станція містить в собі плату GPS-приймача для отримання сигналів від штучних супутників та інтегрований блок управління та зв'язку, а роверна станція містить в собі плату GPS-приймача для отримання сигналів від штучних супутників, блок зв'язку, блок запису даних і контролю якості та блок управління, що забезпечує роботу плати GPS-приймача, блока зв'язку та блока запису даних і контролю якості; блок управління роверної станції здатний отримувати інформацію про перешкоди від базової станції, що автоматично генерується та реєструється в інтегрованому блоці управління та зв'язку кожної базової станції, і після цього вибирати з множини базових станцій ту, котра передає найбільш підходящі корекції, яка відрізняється тим, що в неї додатково введений блок контролю якості, перший вхід якого з'єднаний з комунікаційним сервером, а другий - з блоком аналізу та обробки, а також центр обробки та зв'язку, який об'єднує в собі комунікаційний сервер, вищеназваний блок контролю якості, блок аналізу та обробки і термінальний блок, крім того, до складу роверної станції введено блок запису і контролю якості для запису і контролю первинних даних та запису даних, отриманих з блока аналізу та обробки координатних визначень в режимі on-line, також на базовій станції блоки управління та зв'язку об'єднані в єдиний інтегрований блок управління та зв'язку. 3 UA 78185 U 4 UA 78185 U Комп’ютерна верстка А. Крижанівський Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюSystem of high-accuracy determination of coordinates on the basis of satellite radio-navigation systems
Автори англійськоюKharchenko Volodymyr Petrovych, Kondratiuk Vasyl Mykhailovych, Ilnytska Svitlana Ivanivna, Vyshniakova Yevhania Viktorivnal, Trykoz Valerii Pavlovych, Kutsenko Oleksandr Viktorovych, Kondratiuk Maryna Vasylivna, Vasyliev Ihor Vasyliovych, Savchenko Oleksii Volodymyrovych
Назва патенту російськоюСистема высокоточного определения координат на основе спутниковых радионавигационных систем
Автори російськоюХарченко Владимир Петрович, Кондратюк Василий Михайлович, Ильницкая Светлана Ивановна, Вишнякова Евгения Викторовна, Трикоз Валерий Павлович, Куценко Александр Викторович, Кондратюк Марина Васильевна, Васильев Игорь Васильевич, Савченко Алексей Владимирович
МПК / Мітки
МПК: G01S 5/14
Мітки: радіонавігаційних, систем, високоточного, визначення, основі, система, координат, супутникових
Код посилання
<a href="https://ua.patents.su/7-78185-sistema-visokotochnogo-viznachennya-koordinat-na-osnovi-suputnikovikh-radionavigacijjnikh-sistem.html" target="_blank" rel="follow" title="База патентів України">Система високоточного визначення координат на основі супутникових радіонавігаційних систем</a>
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем
Номер патенту: 69794
Опубліковано: 15.09.2004
Автори: Піскорж Володимир Вікторович, Рудіч Олександр Васильович, Верещак Олександр Петрович, Нестерович Андрій Геннадійович
Мітки: радіонавігаційних, сигналами, супутникових, систем, користувача, руху, визначення, параметрів, спосіб
Формула / Реферат:
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, що включає в себе прийом навігаційною апаратурою користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, завдання навігаційною апаратурою користувача моментів часу прийому сигналів, визначення для кожного космічного апарата супутникових радіонавігаційних систем, сигнали якого були прийняті навігаційною...
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем
Номер патенту: 89471
Опубліковано: 10.02.2010
Автори: Рудіч Олександр Васильович, Літус Юрій Павлович, Піскорж Володимир Вікторович, Ільченко Сергій Вікторович, Нестерович Андрій Геннадійович, Бурдаков Сергій Миколайович, Семиволос Сергій Павлович, Сумкін Герман Павлович, Ніколаєв Андрій Вадимович, Верещак Олександр Петрович, Усенко Петро Якович
МПК: G01S 5/00, G01S 13/58, H04B 7/00, G01S 13/00
Мітки: параметрів, сигналами, руху, визначення, систем, супутникових, радіонавігаційних, користувача, спосіб
Формула / Реферат:
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, який включає в себеприйом навігаційною апаратурою користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем,задання навігаційною апаратурою користувача моментів часу прийому сигналів,визначення для кожного космічного апарата супутникових радіонавігаційних систем, сигнали якого були...
Спосіб імітації сеансу навігаційних вимірювань супутникових радіонавігаційних систем
Номер патенту: 65085
Опубліковано: 15.03.2004
Автори: Семиволос Сергій Павлович, Усенко Петро Якович, Піскорж Володимир Вікторович, Нестерович Андрій Геннадійович, Верещак Олександр Петрович, Рудіч Олександр Васильович
МПК: G01C 23/00, G01S 11/00
Мітки: сеансу, імітації, радіонавігаційних, систем, супутникових, навігаційних, спосіб, вимірювань
Формула / Реферат:
Спосіб імітації сеансу навігаційних вимірювань супутникових радіонавігаційних систем, який включає в себе вибір дати та інтервалу часу всередині даної дати, які визначають часовий інтервал імітації сеансу навігаційних вимірювань апаратури користувача, що контролюється; вибір типів супутникових радіонавігаційних систем, сигнали яких повинні імітуватись; вибір частотного діапазону навігаційних сигналів, що імітуються, космічних апаратів...
Система для визначення координат та швидкості рухомого об’єкта
Номер патенту: 69200
Опубліковано: 16.08.2004
Автори: Машков Олег Альбертович, Кравченко Юрій Васильович, Мосов Сергій Петрович, Савченко Віталій Анатолійович
МПК: G01S 5/02
Мітки: об'єкта, рухомого, швидкості, система, координат, визначення
Формула / Реферат:
Система для визначення координат та швидкості рухомого об'єкта, що містить приймач радіонавігаційних сигналів, встановлений на рухомому об'єкті, та мережу випромінювачів радіонавігаційних сигналів, встановлених на навігаційних космічних апаратах, яка відрізняється тим, що система додатково містить радіонавігаційну станцію, встановлену на літальному апараті, яка включає приймач, блок обробки та випромінювач радіонавігаційних сигналів.
Система завантаження узагальнених виробничих систем складання на основі статистичного керування складними технологічними процесами
Номер патенту: 45225
Опубліковано: 26.10.2009
Автори: Іваненко Руслан Олександрович, Філіппова Марина В`ячеславівна, Діордіца Ірина Миколаївна, Вислоух Сергій Петрович, Філіппов Олексій В'ячеславович, Діордіца Анна Миколаївна
МПК: B23Q 41/08
Мітки: завантаження, складними, система, технологічними, складання, статистичного, узагальнених, виробничих, систем, процесами, основі, керування
Формула / Реферат:
Система завантаження узагальнених виробничих систем складання на основі статистичного керування складними технологічними процесами, що містить блок керування виробничою системою, в який входить блок оператора, вхід якого підключено до виходу блока інформації про виробничі завдання, а вихід - до входу блока статистичного керування складними технологічними процесами, який має зв'язок з блоком "узагальнена виробнича система" та містить...
Попередній патент: Пристрій підвищення ефективності вітроенергетичної установки типу дар’є
Наступний патент: Спосіб лагуна обробки свіжовиловлених молюсків, переважно рапани
Випадковий патент: Сильфонний компенсатор