Спосіб визначення параметрів руху локаційних об’єктів у багатопозиційному комплексі
Номер патенту: 79759
Опубліковано: 25.04.2013
Автори: Каневський Леонід Броніславович, Ковбасюк Сергій Валентинович
Формула / Реферат
Спосіб визначення параметрів руху локаційних об'єктів у багатопозиційному комплексі, згідно з яким з відомого каталогу даних вибирають початкові параметри руху про заданий ЛО, які передають кожній ІВС у запиті з центру спільної обробки БПК, після чого кожною ІВС в своїй зоні спостереження проводять просторово-часовий прийом локаційного сигналу, далі в кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу отримують свій масив виміряних параметрів руху ЛО, який запам'ятовують, кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО, який відрізняється тим, що в кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу разом із своїм масивом виміряних параметрів руху ЛО одночасно отримують і свій масив кутових параметрів ракурсу спостереження ЛО, з якого вибирають спільні початкові та вихідні їх значення для кожної пари ІВС, які передають у центр спільної обробки БПК, де визначають найкращий ракурс спостереження і відповідний йому оптимальний для всіх ІВС момент часу визначення параметрів руху ЛО у БПК, який передають у повторному запиті кожній ІВС, після чого кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО на оптимальний для всіх ІВС момент часу визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО.
Текст
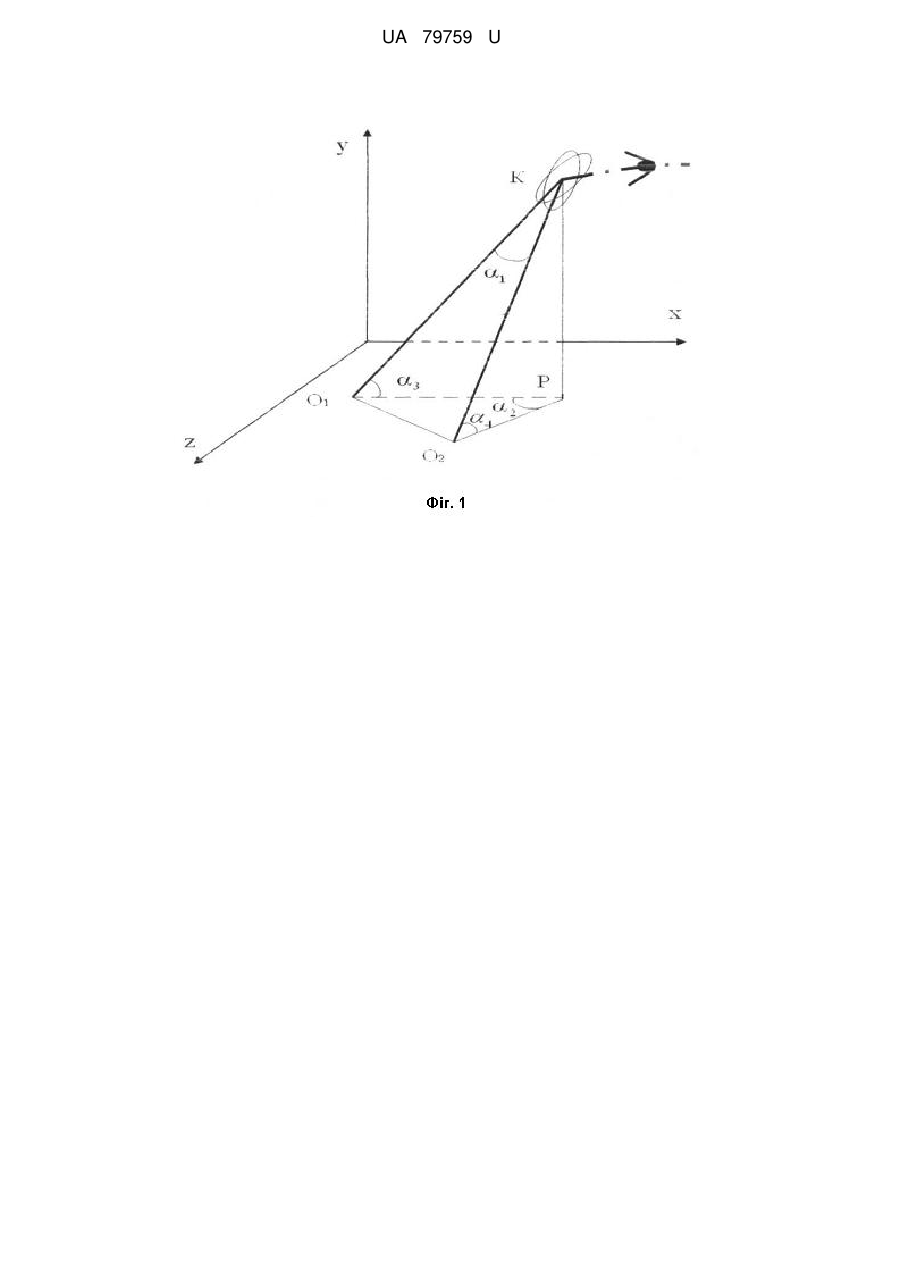
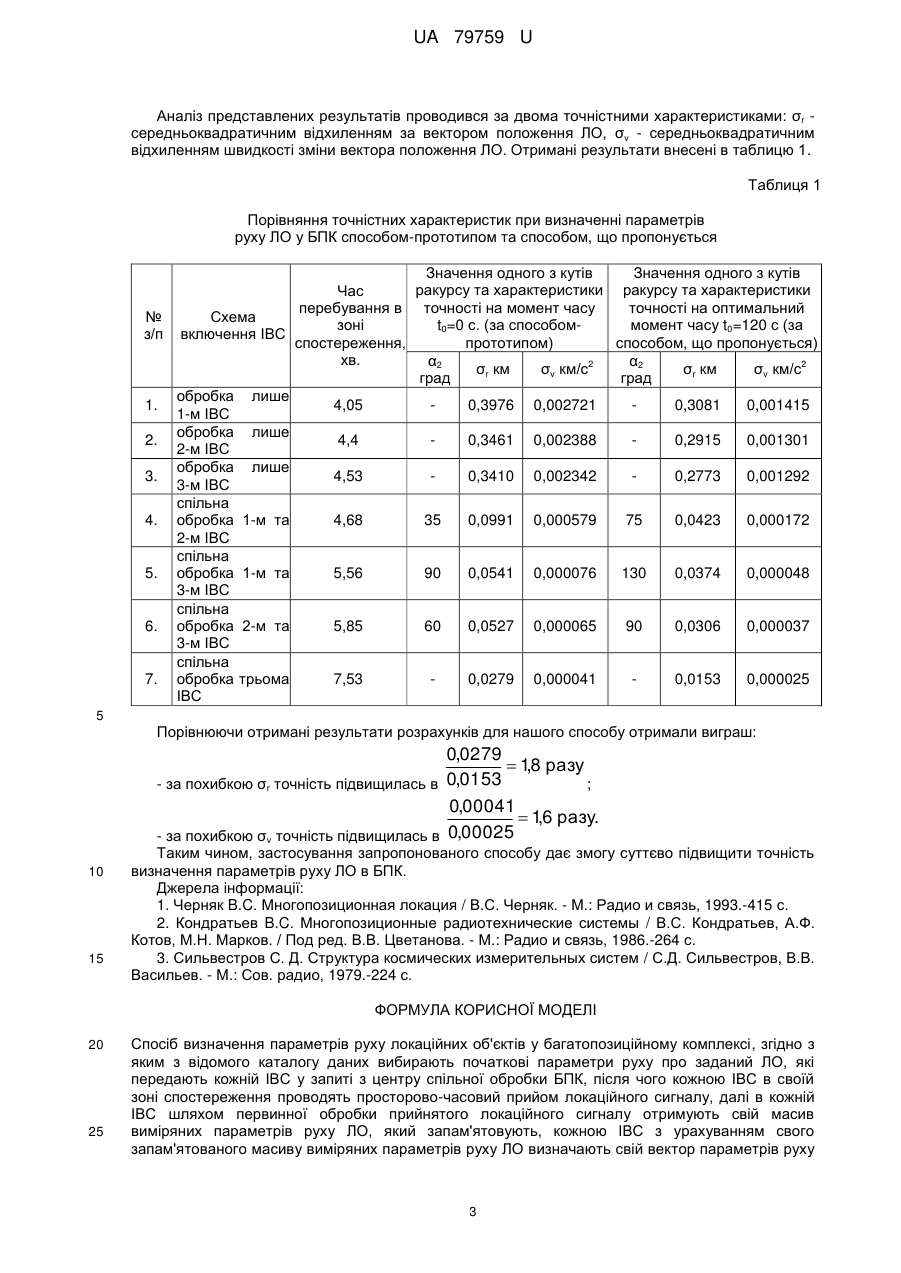
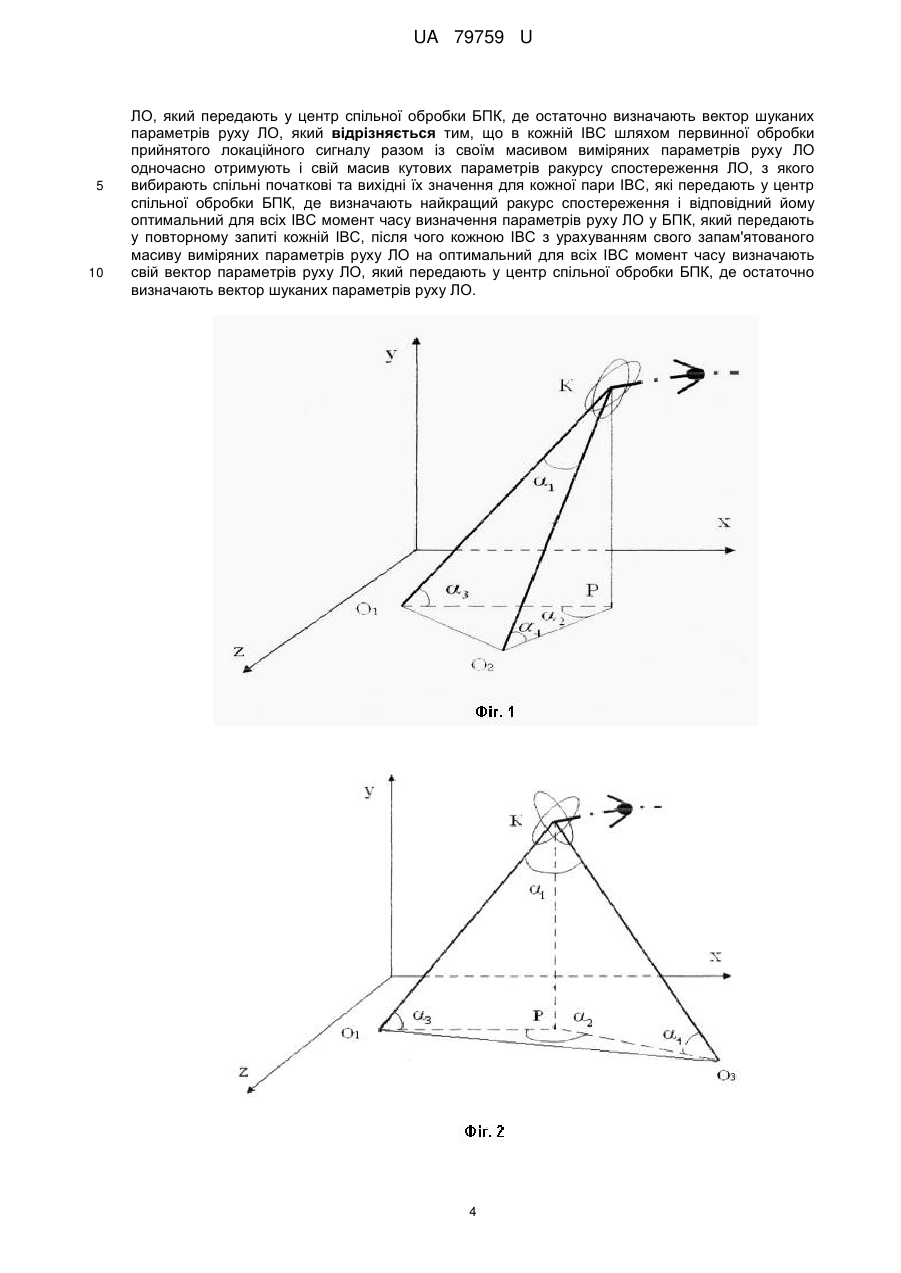
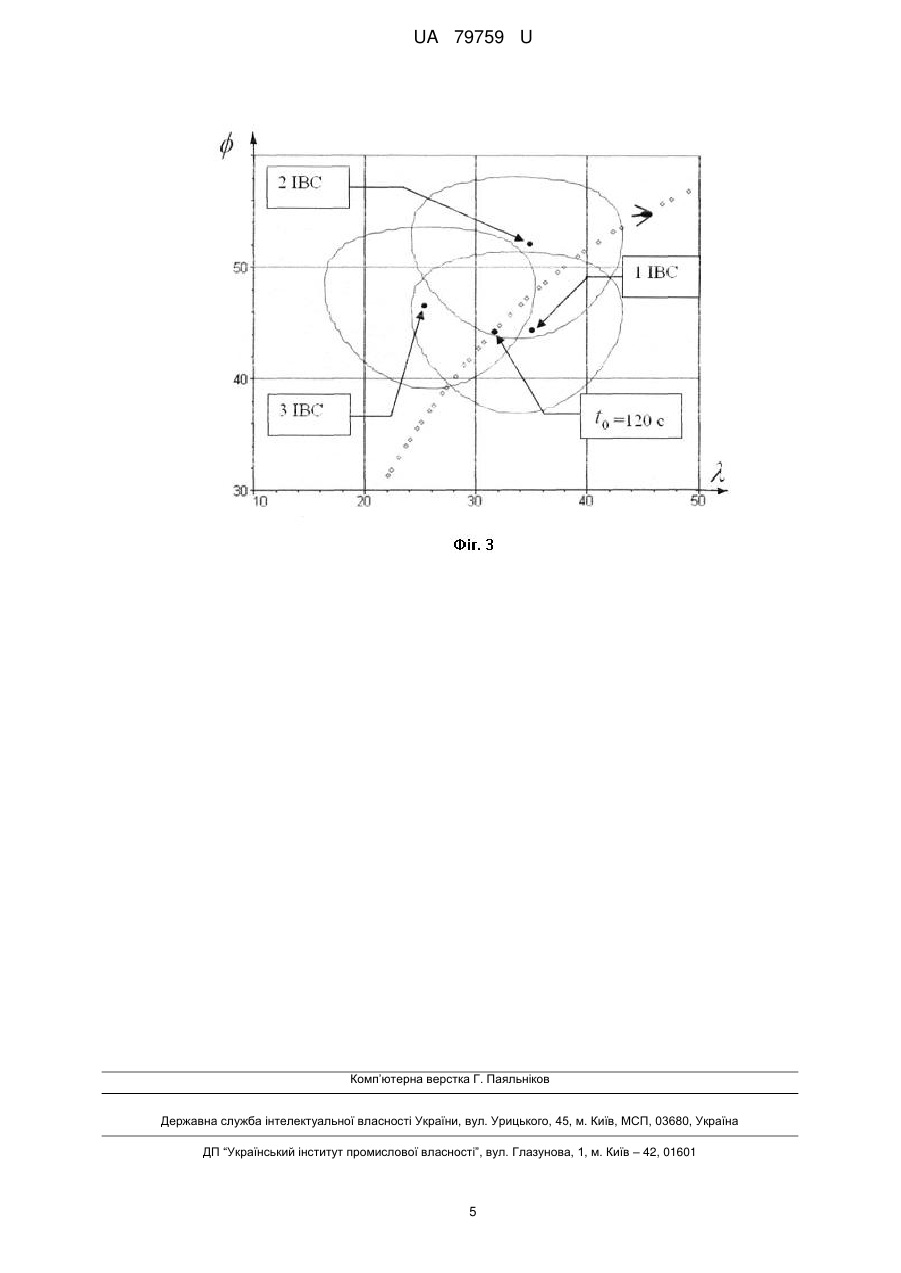
Реферат: Спосіб визначення параметрів руху локаційних об'єктів у багатопозиційному комплексі, згідно з яким з відомого каталогу даних вибирають початкові параметри руху про заданий ЛО, які передають кожній ІВС у запиті з центру спільної обробки БПК, після чого кожною ІВС в своїй зоні спостереження проводять просторово-часовий прийом локаційного сигналу, далі в кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу отримують свій масив виміряних параметрів руху ЛО, який запам'ятовують, кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО. В кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу разом із своїм масивом виміряних параметрів руху ЛО одночасно отримують і свій масив кутових параметрів ракурсу спостереження ЛО, з якого вибирають спільні початкові та вихідні їх значення для кожної пари ІВС, які передають у центр спільної обробки БПК, де визначають найкращий ракурс спостереження і відповідний йому оптимальний для всіх ІВС момент часу визначення параметрів руху ЛО у БПК, який передають у повторному запиті кожній ІВС, після чого кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО на оптимальний для всіх ІВС момент часу визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО. UA 79759 U (54) СПОСІБ ВИЗНАЧЕННЯ ПАРАМЕТРІВ РУХУ ЛОКАЦІЙНИХ ОБ'ЄКТІВ У БАГАТОПОЗИЦІЙНОМУ КОМПЛЕКСІ UA 79759 U UA 79759 U 5 10 15 20 25 30 35 40 45 50 55 Корисна модель належить до авіакосмічної галузі, а саме до способів визначення параметрів руху космічного апарата, й може застосовуватися для підвищення точності балістико-навігаційного забезпечення споживачів різноманітного рівня та оптимального планування проведення вимірювань у багатопозиційному комплексі (БПК). Розвиток теоретичних основ багатопозиційної радіолокації [1-2] відкрив перспективи підвищення точності визначення параметрів руху локаційного об'єкта (ЛО) за рахунок використання БПК. Але є випадки, коли такої точності недостатньо, а обмеження, що висуваються до центру спільної обробки БПК, змушують проводити стискання вимірювальних параметрів від кожної інформаційно-вимірювальної системи (ІВС), що призводить до ще більшого зниження точності визначення параметрів руху ЛО. Відомий спосіб визначення параметрів руху ЛО у БПК [3, с 144], що вибраний як прототип. У способі-прототипі, як і в запропонованому способі, з відомого каталогу даних вибирають початкові параметри руху про заданий ЛО, які передають кожній ІВС у запиті з центру спільної обробки БПК, після чого кожною ІВС в своїй зоні спостереження проводять просторово-часовий прийом локаційного сигналу, далі в кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу отримують свій масив виміряних параметрів руху ЛО, який запам'ятовують, кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО. Але на відміну від способу, що пропонується, у способі-прототипі для спільної обробки отриманих з кожної ІВС вимірювальних параметрів руху ЛО проводять їх стиснення та передачу в центр спільної обробки БПК. При цьому послідовну оцінку вимірювальних параметрів, як правило, проводять на момент часу, коли ЛО входить в зону спостереження БПК. Оскільки даний момент часу для кожної ІВС є різним, то і вектор параметрів руху ЛО в кожній ІВС визначається на різний момент часу. Це призводить до зниження точності шуканих параметрів руху ЛО, підвищення якої можливо лише за рахунок збільшення кількості інформації, що передається з кожної ІВС в центр спільної обробки БПК. Ця кількість асимптотично прямує до числа вимірювань і унеможливлює їх передачу в центр спільної обробки БПК. До того ж момент часу, коли ЛО входить в зону спостереження БПК, не завжди є оптимальним для пошуку параметрів руху ЛО з мінімальними похибками, що також негативно впливає на точність вектора шуканих параметрів руху. Таким чином, суттєвим недоліком способу-прототипу є низька точність визначення параметрів руху ЛО в БПК. В основу корисної моделі поставлено задачу вдосконалення способу визначення параметрів руху ЛО у БПК, щоб забезпечити підвищення точності параметрів руху ЛО у БПК. Поставлена задача розв'язується тим, що у способі підвищення точності визначення параметрів руху ЛО у БПК, з відомого каталогу даних вибирають початкові параметри руху про заданий ЛО, які передають кожній ІВС у запиті з центру спільної обробки БПК, після чого кожною ІВС в своїй зоні спостереження проводять просторово-часовий прийом локаційного сигналу, далі в кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу отримують свій масив виміряних параметрів руху ЛО, який запам'ятовують, кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО, згідно з корисною моделлю, в кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу разом із своїм масивом виміряних параметрів руху ЛО одночасно отримують і свій масив кутових параметрів ракурсу спостереження ЛО, з якого вибирають спільні початкові та вихідні їх значення для кожної пари IBС, які передають у центр спільної обробки БПК, де визначають найкращий ракурс спостереження і відповідний йому оптимальний для всіх ІВС момент часу визначення параметрів руху ЛО у БПК, який передають у повторному запиті кожній ІВС, після чого кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО на оптимальний для всіх ІВС момент часу визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО. Суть корисної моделі, що пропонується, пояснюється кресленнями: - фіг. 1 - відображає кути ракурсу на ЛО та просторову орієнтацію еліпсоїдів похибок шуканих параметрів, результат перетину яких відповідає великій похибці; - фіг. 2 - відображає кути ракурсу на ЛО та просторову орієнтацію еліпсоїдів похибок шуканих параметрів, результат перетину яких відповідає найменшій похибці; 1 UA 79759 U 5 10 15 20 25 30 35 40 45 50 55 - фіг. 3 - схема розміщення ІВС у БПК з проекціями на земну поверхню зон їх спостереження і траси польоту ЛО. Завдяки тому, що в процесі первинної обробки прийнятого локаційного сигналу кожною ІВС в своїй зоні спостереження додатково отримують свій масив кутових параметрів ракурсу спостереження ЛО, з'являється можливість врахувати ще один інформативний параметр ракурс. У літературі з теорії обробки локаційної інформації таке поняття як ракурс розглядають лише для бістатичної системи. Це - кут α1 між напрямком випромінюваного та прийнятого сигналу в площині передавач - ціль-приймач, як показано на фіг. 1 та фіг. 2. (де, у, z) геоцентрична абсолютна система координат, що є спільною при об'єднанні вимірювальних параметрів з усіх ІВС, розміщення яких позначено точками О1,О2,О3. Точки К, Р фіксоване місцезнаходження ЛО в певний момент часу та його проекція на земну поверхню відповідно. У запропонованому способі БПК містить автономні ІВС. Тому залежність точності визначення координат засобами БПК від впливу ракурсу на ціль слід визначати в тримірній системі координат, що до сьогодні не розглядалось. У тримірній системі координат ракурс залежить від трьох кутів α2, α3, α4, як показано на фіг. 2. При цьому α2 - кут між проекціями напрямку спостереження на ціль двох ІВС, а α3 та α4 - кути між проекцією та напрямком спостереження в кожній з цих двох ІВС. Відповідно до цього ракурс в тримірній системі координат за своєю суттю є функція залежності від цих кутів. Урахування спільних початкових та вихідних значень кутових параметрів ракурсу для кожної пари ІВС дає змогу проаналізувати всі можливі їх значення і визначити найкращий ракурс спостереження та відповідний йому оптимальний для всіх ІВС момент часу визначення параметрів руху ЛО у БПК. При цьому підвищення точності визначення параметрів руху ЛО у БПК забезпечується у масштабі часу, близькому до реального, без додаткових матеріальних затрат щодо технічних перебудов (модернізації) центру спільної обробки БПК. Таким чином, корисна модель, що пропонується, забезпечує суттєве підвищення точності визначення параметрів руху ЛО у БПК. Заявлений спосіб визначення параметрів руху локаційних об'єктів у багатопозиційному комплексі виконують у такій послідовності. 1. З відомого каталогу даних вибирають початкові параметри руху про заданий ЛО, які передають кожній ІВС у запиті з центру спільної обробки БПК. 2. Після отримання запиту кожною ІВС в своїй зоні спостереження проводять просторовочасовий прийом локаційного сигналу. 3. В кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу одночасно отримують свій масив виміряних параметрів руху ЛО та свій масив кутових параметрів ракурсу спостереження ЛО. 4. В кожній ІВС свій масив виміряних параметрів руху ЛО запам'ятовують, а з свого масиву кутових параметрів ракурсу спостереження ЛО вибирають спільні початкові та вихідні їх значення для кожної пари ІВС, які передають у центр спільної обробки БПК. 5. Визначають найкращий ракурс спостереження і відповідний йому оптимальний для всіх ІВС момент часу визначення параметрів руху ЛО у БПК, який передають у повторному запиті кожній ІВС. 6. Кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО на оптимальний для всіх ІВС момент часу визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО. Експериментальне підтвердження Переваги застосування запропонованого способу з'ясовували шляхом моделювань з використанням програмного пакета Maple. Як приклад, як БПК розглядали трипозиційну систему спостереження, розміщення якої територіально обмежене кордонами України (фφіг. 3). Тактикотехнічні характеристики трьох ІВС прийняті такі, як в квантово-оптичній системі "Сажень-С" з різними географічними координатами (ɸ - довгота, λ - широта). Модель руху ЛО прийнята відповідно до параметрів руху космічного апарату "Січ-2". Відповідні обрахунки проводились способом-прототипом і нашим запропонованим способом. В способі-прототипі, як це виконується завжди, визначення параметрів руху ЛО в БПК проведені на момент часу t0=0 с, де t0 - час визначення початкових умов руху ЛО. А у запропонованому способі даний час вибирався відповідно до найкращого ракурсу, що для даного прикладу становив t0=120 с. 2 UA 79759 U Аналіз представлених результатів проводився за двома точністними характеристиками: σr середньоквадратичним відхиленням за вектором положення ЛО, σv - середньоквадратичним відхиленням швидкості зміни вектора положення ЛО. Отримані результати внесені в таблицю 1. Таблиця 1 Порівняння точністних характеристик при визначенні параметрів руху ЛО у БПК способом-прототипом та способом, що пропонується Значення одного з кутів Значення одного з кутів ракурсу та характеристики ракурсу та характеристики Час точності на оптимальний перебування в точності на момент часу № Схема t0=0 с. (за способоммомент часу t0=120 с (за зоні з/п включення ІВС прототипом) способом, що пропонується) спостереження, хв. α2 α2 2 2 σr км σv км/с σr км σv км/с град град обробка лише 1. 4,05 0,3976 0,002721 0,3081 0,001415 1-м ІВС обробка лише 2. 4,4 0,3461 0,002388 0,2915 0,001301 2-м ІВС обробка лише 3. 4,53 0,3410 0,002342 0,2773 0,001292 3-м ІВС спільна 4. обробка 1-м та 4,68 35 0,0991 0,000579 75 0,0423 0,000172 2-м ІВС спільна 5. обробка 1-м та 5,56 90 0,0541 0,000076 130 0,0374 0,000048 3-м ІВС спільна 6. обробка 2-м та 5,85 60 0,0527 0,000065 90 0,0306 0,000037 3-м ІВС спільна 7. обробка трьома 7,53 0,0279 0,000041 0,0153 0,000025 ІВС 5 Порівнюючи отримані результати розрахунків для нашого способу отримали виграш: 0,0279 18 разу , - за похибкою σr точність підвищилась в 0,0153 ; 0,00041 16 разу. , - за похибкою σv точність підвищилась в 0,00025 10 15 Таким чином, застосування запропонованого способу дає змогу суттєво підвищити точність визначення параметрів руху ЛО в БПК. Джерела інформації: 1. Черняк B.C. Многопозиционная локация / В.С. Черняк. - М.: Радио и связь, 1993.-415 с. 2. Кондратьев B.C. Многопозиционные радиотехнические системы / B.С. Кондратьев, А.Ф. Котов, М.Н. Марков. / Под ред. В.В. Цветанова. - М.: Радио и связь, 1986.-264 с. 3. Сильвестров С. Д. Структура космических измерительных систем / C.Д. Сильвестров, В.В. Васильев. - М.: Сов. радио, 1979.-224 с. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 20 25 Спосіб визначення параметрів руху локаційних об'єктів у багатопозиційному комплексі, згідно з яким з відомого каталогу даних вибирають початкові параметри руху про заданий ЛО, які передають кожній ІВС у запиті з центру спільної обробки БПК, після чого кожною ІВС в своїй зоні спостереження проводять просторово-часовий прийом локаційного сигналу, далі в кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу отримують свій масив виміряних параметрів руху ЛО, який запам'ятовують, кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО визначають свій вектор параметрів руху 3 UA 79759 U 5 10 ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО, який відрізняється тим, що в кожній ІВС шляхом первинної обробки прийнятого локаційного сигналу разом із своїм масивом виміряних параметрів руху ЛО одночасно отримують і свій масив кутових параметрів ракурсу спостереження ЛО, з якого вибирають спільні початкові та вихідні їх значення для кожної пари ІВС, які передають у центр спільної обробки БПК, де визначають найкращий ракурс спостереження і відповідний йому оптимальний для всіх ІВС момент часу визначення параметрів руху ЛО у БПК, який передають у повторному запиті кожній ІВС, після чого кожною ІВС з урахуванням свого запам'ятованого масиву виміряних параметрів руху ЛО на оптимальний для всіх ІВС момент часу визначають свій вектор параметрів руху ЛО, який передають у центр спільної обробки БПК, де остаточно визначають вектор шуканих параметрів руху ЛО. 4 UA 79759 U Комп’ютерна верстка Г. Паяльніков Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determination of parameters of motion of location objects in multi-position complex
Автори англійськоюKanevskyi Leonid Bronislavovych, Kovbasiuk Serhii Valentynovych
Назва патенту російськоюСпособ определения параметров движения локационных объектов в многопозиционном комплексе
Автори російськоюКаневский Леонид Брониславович, Ковбасюк Сергей Валентинович
МПК / Мітки
МПК: G01S 11/00
Мітки: руху, параметрів, локаційних, спосіб, багатопозиційному, об'єктів, визначення, комплекси
Код посилання
<a href="https://ua.patents.su/7-79759-sposib-viznachennya-parametriv-rukhu-lokacijjnikh-obehktiv-u-bagatopozicijjnomu-kompleksi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів руху локаційних об’єктів у багатопозиційному комплексі</a>
Спосіб визначення параметрів руху космічних об’єктів наземними оптичними засобами
Номер патенту: 79216
Опубліковано: 10.04.2013
Автори: Каневський Леонід Броніславович, Ковбасюк Сергій Валентинович
МПК: G01S 11/00
Мітки: засобами, визначення, об'єктів, оптичними, руху, наземними, спосіб, космічних, параметрів
Формула / Реферат:
Спосіб визначення параметрів руху космічних об'єктів наземними оптичними засобами, згідно з яким виконують просторово-часовий прийом локаційного сигналу, який на часовому інтервалі вимірювань представляють у вигляді масиву кутових даних, потім з вимірювальної системи координат дані переводять у систему шуканих параметрів, що є областю оригіналів, визначають часткові похідні від параметрів руху космічного об'єкта за наближеними умовами, після...
Спосіб визначення параметрів руху потягу на перегоні при централізованому розміщенні апаратури автоблокування
Номер патенту: 50743
Опубліковано: 25.06.2010
Автори: Романцев Іван Олегович, Гаврилюк Володимир Ілліч, Рибалка Роман Володимирович
МПК: B61L 25/00
Мітки: перегоні, автоблокування, визначення, спосіб, руху, централізованому, параметрів, апаратури, потягу, розміщенні
Формула / Реферат:
Спосіб визначення параметрів руху потягу на перегоні при централізованому розміщенні апаратури автоблокування, при якому вимірюють напругу на релейному та живлячому кінцях рейкового кола за допомогою відомого способу, після чого проводять аналіз несучих та бокових частот отриманої напруги у часовій області, швидкість руху потягу визначають по інтенсивності зміни кривої значення напруги проаналізованих частот, далі визначають координату...
Спосіб визначення параметрів руху насінин при точному висіві
Номер патенту: 58027
Опубліковано: 25.03.2011
Автори: Чайковський Олександр Борисович, Абрамова Вікторія Вікторівна, Лушников Вячеслав Михайлович, Шмат Сергій Іванович, Гольша Віталій Ігоревич, Златопольський Федір Йосипович
Мітки: спосіб, руху, висіві, насінин, параметрів, визначення, точному
Формула / Реферат:
Спосіб визначення параметрів руху насінин при точному висіві, що включає використання пристрою реєстрації насіння при точному висіві, в якому насіння сходить з висівного диска висівного апарата під кутом сходу до горизонту, пролітає через зони паралельних площин контролю, створених трикоординатним оптико-електронним блоком реєстрації прольоту насіння, який має вигляд прямокутного короба з найбільшими внутрішніми розмірами сошника та...
Спосіб визначення параметрів руху насіння при точному висіві
Номер патенту: 59341
Опубліковано: 10.05.2011
Автори: Златопольський Федір Йосипович, Шмат Сергій Іванович, Абрамова Вікторія Вікторівна, Чайковський Олександр Борисович, Гольша Віталій Ігоревич, Лушников Вячеслав Михайлович
Мітки: насіння, точному, параметрів, висіві, спосіб, руху, визначення
Формула / Реферат:
Спосіб визначення параметрів руху насіння при точному висіві, що включає використання пристрою реєстрації насіння при точному висіві, в якому в точці сходу з висівного диска висівного апарата, який вертикально знаходиться на випробувальному стенді, сходить насіння, рух якого до дна борозни відбувається при опорі повітря, по заданій стінці за зоною руху насіння вертикально встановлена координатна сітка, на відстані не менше 1 м від сітки...
Спосіб підвищення точності визначення параметрів руху космічного апарата
Номер патенту: 56376
Опубліковано: 10.01.2011
Автори: Парфенюк Василь Григорович, Загорулько Олександр Миколайович, Топольницький Павло Петрович, Ожінський Віктор Васильович
МПК: G05B 17/00
Мітки: спосіб, підвищення, космічного, руху, параметрів, апарата, точності, визначення
Формула / Реферат:
Спосіб підвищення точності визначення параметрів руху космічного апарата, який відрізняється тим, що в апаратурі супутникової навігації дані із навігаційного обчислювача надходять до блока робастної обробки, який проводить їх згладжування з використанням завадостійких (робастних) статистичних процедур та видає уточнені параметри руху космічного апарата.
Попередній патент: Допоміжний компонент для регулювання властивостей офсетної фарби, що закріплюється окислювальною полімеризацією
Наступний патент: Спосіб одержання питної води
Випадковий патент: Сироти спосіб спорудження багатоярусної вітроенергетичної башти