Спосіб визначення параметрів руху насінин при точному висіві
Номер патенту: 58027
Опубліковано: 25.03.2011
Автори: Гольша Віталій Ігоревич, Шмат Сергій Іванович, Чайковський Олександр Борисович, Абрамова Вікторія Вікторівна, Лушников Вячеслав Михайлович, Златопольський Федір Йосипович
Формула / Реферат
Спосіб визначення параметрів руху насінин при точному висіві, що включає використання пристрою реєстрації насіння при точному висіві, в якому насіння сходить з висівного диска висівного апарата під кутом сходу до горизонту, пролітає через зони паралельних площин контролю, створених трикоординатним оптико-електронним блоком реєстрації прольоту насіння, який має вигляд прямокутного короба з найбільшими внутрішніми розмірами сошника та закріпленим на висівному апараті, на кожній стороні короба, розташованій навпроти оптичного пристрою паралельного світлового потоку, розміщені паралельно чотири світлочутливих лінійки, перша лінійка встановлена по верхній кромці, четверта лінійка встановлена по нижній кромці сторони короба, від них на відстані, меншій найменшого геометричного розміру насінини розташовані друга та третя лінійки, всі лінійки через швидкодіючі послідовні інтерфейси з'єднані з персональним комп'ютером, при прольоті зони контролю насіння формує на світлочутливих лінійках зони затемнення, виконані з можливістю по інформації, зчитаній з виходу світлочутливих лінійок при одночасній появі зон затемнення на двох взаємно перпендикулярних лінійках, розташованих на однаковій висоті, фіксувати моменти часу ![]() їх появи та визначати в цей момент часу
їх появи та визначати в цей момент часу ![]() - координати середини зон затемнення на двох взаємно перпендикулярних лінійках, по зміні інтервалу часу
- координати середини зон затемнення на двох взаємно перпендикулярних лінійках, по зміні інтервалу часу ![]() та координат
та координат ![]() визначати величини та напрямки швидкості руху кожної насінини при переході з першої лінійки на послідовні, який відрізняється тим, що в координатах XOZ записують рівняння кола радіуса
визначати величини та напрямки швидкості руху кожної насінини при переході з першої лінійки на послідовні, який відрізняється тим, що в координатах XOZ записують рівняння кола радіуса ![]() розташування присмоктувальних отворів, по координатах точок
розташування присмоктувальних отворів, по координатах точок ![]() визначають апроксимуючу функцію, яка є рівнянням траєкторії руху насіння, сумісним рішенням рівняння траєкторії та рівняння кола розташування отворів на висівному диску визначаємо
визначають апроксимуючу функцію, яка є рівнянням траєкторії руху насіння, сумісним рішенням рівняння траєкторії та рівняння кола розташування отворів на висівному диску визначаємо ![]() координати Тс,
координати Тс, ![]() - точки сходу насіння, а по них напрямок вектора швидкості в площині XOZ в момент сходу насіння (
- точки сходу насіння, а по них напрямок вектора швидкості в площині XOZ в момент сходу насіння (![]() - кут сходу), по обчислених
- кут сходу), по обчислених ![]() з урахуванням початкових значень
з урахуванням початкових значень ![]() при
при ![]() , де
, де ![]() - відома кутова швидкість обертання висівного диска, визначають апроксимуючі функції
- відома кутова швидкість обертання висівного диска, визначають апроксимуючі функції ![]() , за якими у будь-якій точці траєкторії визначають величину швидкості руху насіння та напрямку.
, за якими у будь-якій точці траєкторії визначають величину швидкості руху насіння та напрямку.
Текст
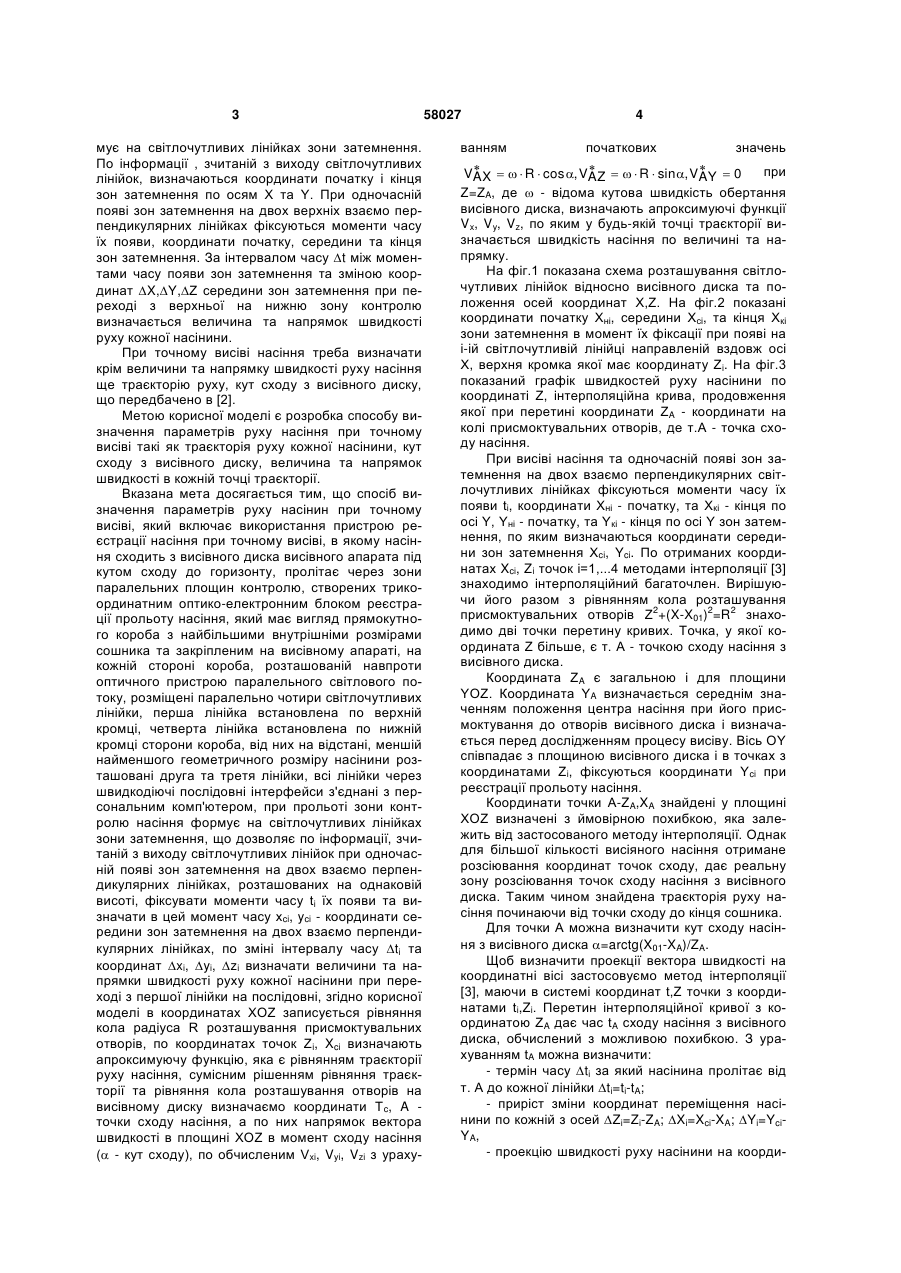
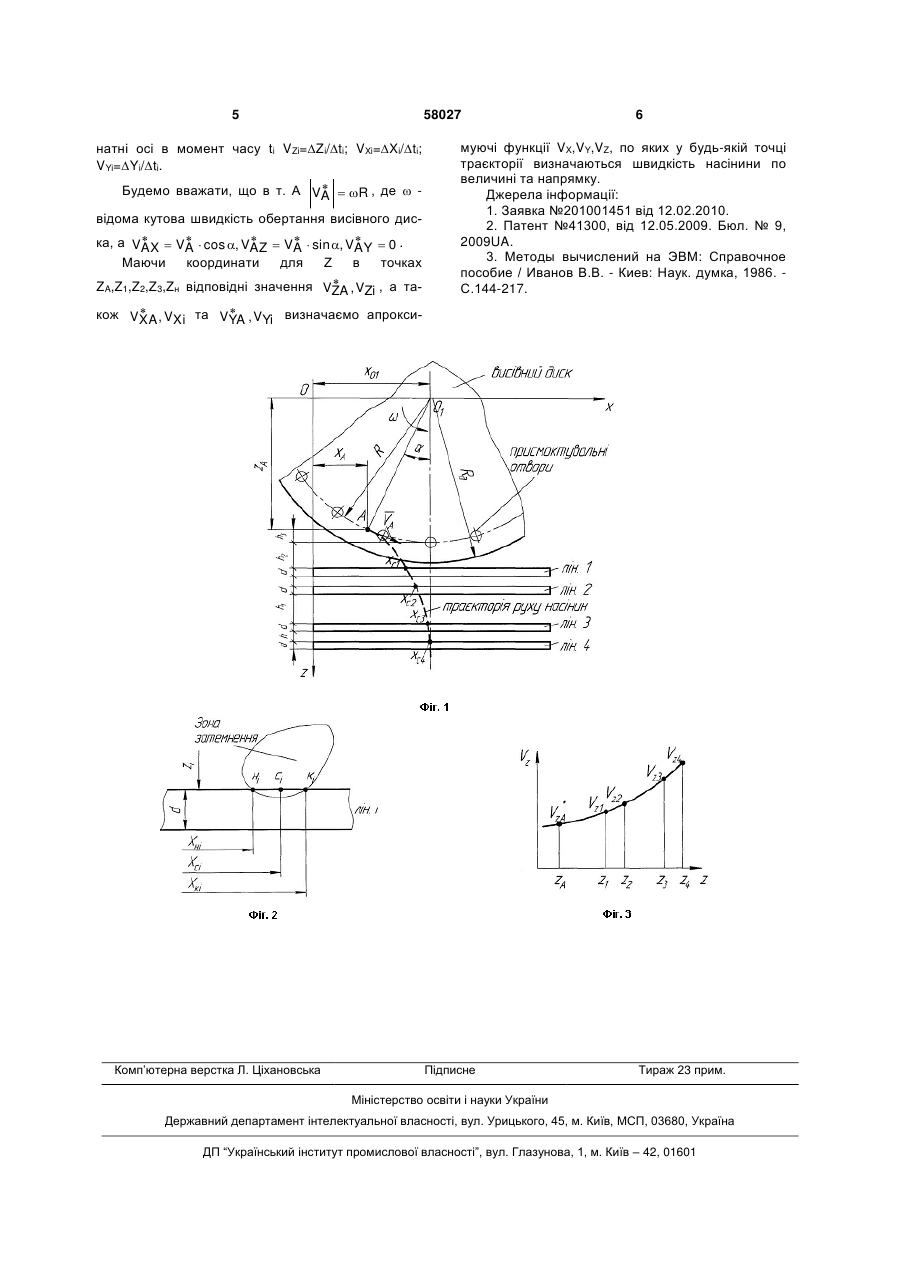
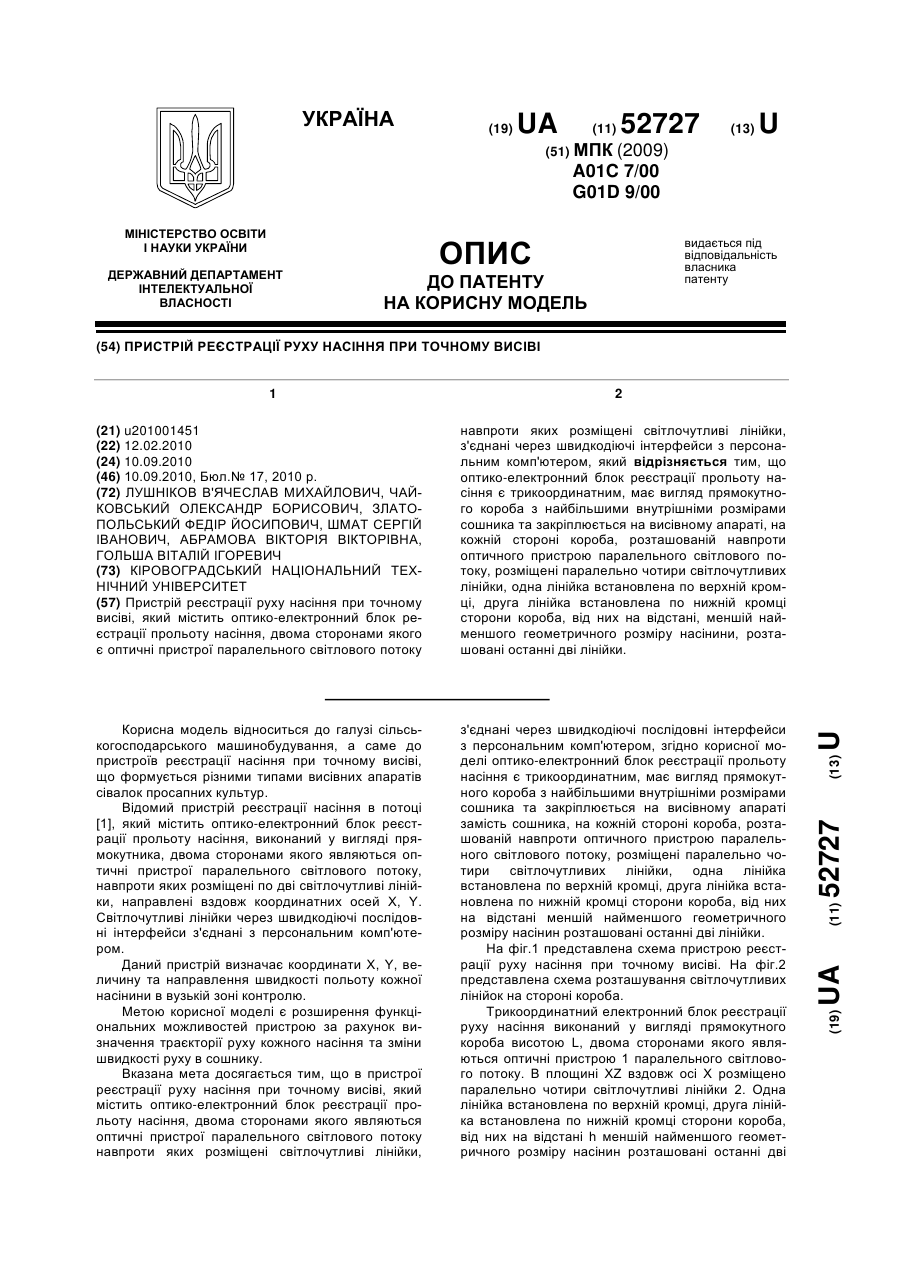
Спосіб визначення параметрів руху насінин при точному висіві, що включає використання пристрою реєстрації насіння при точному висіві, в якому насіння сходить з висівного диска висівного апарата під кутом сходу до горизонту, пролітає через зони паралельних площин контролю, створених трикоординатним оптико-електронним блоком реєстрації прольоту насіння, який має вигляд прямокутного короба з найбільшими внутрішніми розмірами сошника та закріпленим на висівному апараті, на кожній стороні короба, розташованій навпроти оптичного пристрою паралельного світлового потоку, розміщені паралельно чотири світлочутливих лінійки, перша лінійка встановлена по верхній кромці, четверта лінійка встановлена по нижній кромці сторони короба, від них на відстані, меншій найменшого геометричного розміру насінини розташовані друга та третя лінійки, всі лінійки через швидкодіючі послідовні інтерфейси з'єднані з персональним комп'ютером, при прольоті зони U 2 (19) 1 3 мує на світлочутливих лінійках зони затемнення. По інформації , зчитаній з виходу світлочутливих лінійок, визначаються координати початку і кінця зон затемнення по осям X та Y. При одночасній появі зон затемнення на двох верхніх взаємо перпендикулярних лінійках фіксуються моменти часу їх появи, координати початку, середини та кінця зон затемнення. За інтервалом часу t між моментами часу появи зон затемнення та зміною координат X,Y,Z середини зон затемнення при переході з верхньої на нижню зону контролю визначається величина та напрямок швидкості руху кожної насінини. При точному висіві насіння треба визначати крім величини та напрямку швидкості руху насіння ще траєкторію руху, кут сходу з висівного диску, що передбачено в [2]. Метою корисної моделі є розробка способу визначення параметрів руху насіння при точному висіві такі як траєкторія руху кожної насінини, кут сходу з висівного диску, величина та напрямок швидкості в кожній точці траєкторії. Вказана мета досягається тим, що спосіб визначення параметрів руху насінин при точному висіві, який включає використання пристрою реєстрації насіння при точному висіві, в якому насіння сходить з висівного диска висівного апарата під кутом сходу до горизонту, пролітає через зони паралельних площин контролю, створених трикоординатним оптико-електронним блоком реєстрації прольоту насіння, який має вигляд прямокутного короба з найбільшими внутрішніми розмірами сошника та закріпленим на висівному апараті, на кожній стороні короба, розташованій навпроти оптичного пристрою паралельного світлового потоку, розміщені паралельно чотири світлочутливих лінійки, перша лінійка встановлена по верхній кромці, четверта лінійка встановлена по нижній кромці сторони короба, від них на відстані, меншій найменшого геометричного розміру насінини розташовані друга та третя лінійки, всі лінійки через швидкодіючі послідовні інтерфейси з'єднані з персональним комп'ютером, при прольоті зони контролю насіння формує на світлочутливих лінійках зони затемнення, що дозволяє по інформації, зчитаній з виходу світлочутливих лінійок при одночасній появі зон затемнення на двох взаємо перпендикулярних лінійках, розташованих на однаковій висоті, фіксувати моменти часу ti їх появи та визначати в цей момент часу xci, yci - координати середини зон затемнення на двох взаємо перпендикулярних лінійках, по зміні інтервалу часу ti та координат xi, yi, zi визначати величини та напрямки швидкості руху кожної насінини при переході з першої лінійки на послідовні, згідно корисної моделі в координатах XOZ записується рівняння кола радіуса R розташування присмоктувальних отворів, по координатах точок Zi, Xci визначають апроксимуючу функцію, яка є рівнянням траєкторії руху насіння, сумісним рішенням рівняння траєкторії та рівняння кола розташування отворів на висівному диску визначаємо координати Tc, A точки сходу насіння, а по них напрямок вектора швидкості в площині XOZ в момент сходу насіння ( - кут сходу), по обчисленим Vxi, Vyi, Vzi з ураху 58027 4 ванням початкових значень R cos , V R sin , V 0 при VAX AZ AY Z=ZA, де - відома кутова швидкість обертання висівного диска, визначають апроксимуючі функції Vx, Vy, Vz, по яким у будь-якій точці траєкторії визначається швидкість насіння по величині та напрямку. На фіг.1 показана схема розташування світлочутливих лінійок відносно висівного диска та положення осей координат X,Z. На фіг.2 показані координати початку Xнi, середини Xсi, та кінця Xкi зони затемнення в момент їх фіксації при появі на і-ій світлочутливій лінійці направленій вздовж осі X, верхня кромка якої має координату Zi. На фіг.3 показаний графік швидкостей руху насінини по координаті Z, інтерполяційна крива, продовження якої при перетині координати ZA - координати на колі присмоктувальних отворів, де т.A - точка сходу насіння. При висіві насіння та одночасній появі зон затемнення на двох взаємо перпендикулярних світлочутливих лінійках фіксуються моменти часу їх появи ti, координати Xнi - початку, та Xкi - кінця по осі Y, Yнi - початку, та Yкi - кінця по осі Y зон затемнення, по яким визначаються координати середини зон затемнення Xci, Yci. По отриманих координатах Xci, Zi точок і=1,...4 методами інтерполяції [3] знаходимо інтерполяційний багаточлен. Вирішуючи його разом з рівнянням кола розташування присмоктувальних отворів Z2+(X-X01)2=R2 знаходимо дві точки перетину кривих. Точка, у якої координата Z більше, є т. A - точкою сходу насіння з висівного диска. Координата ZA є загальною і для площини YOZ. Координата YA визначається середнім значенням положення центра насіння при його присмоктування до отворів висівного диска і визначається перед дослідженням процесу висіву. Вісь OY співпадає з площиною висівного диска і в точках з координатами Zi, фіксуються координати Yci при реєстрації прольоту насіння. Координати точки A-ZA,XA знайдені у площині XOZ визначені з ймовірною похибкою, яка залежить від застосованого методу інтерполяції. Однак для більшої кількості висіяного насіння отримане розсіювання координат точок сходу, дає реальну зону розсіювання точок сходу насіння з висівного диска. Таким чином знайдена траєкторія руху насіння починаючи від точки сходу до кінця сошника. Для точки A можна визначити кут сходу насіння з висівного диска =arctg(X01-XA)/ZA. Щоб визначити проекції вектора швидкості на координатні вісі застосовуємо метод інтерполяції [3], маючи в системі координат t,Z точки з координатами ti,Zi. Перетин інтерполяційної кривої з координатою ZA дає час tA сходу насіння з висівного диска, обчислений з можливою похибкою. З урахуванням tA можна визначити: - термін часу ti за який насінина пролітає від т. A до кожної лінійки ti=ti-tA; - приріст зміни координат переміщення насінини по кожній з осей Zi=Zi-ZA; Xi=Xci-XA; Yi=YciYA, - проекцію швидкості руху насінини на коорди 5 58027 натні осі в момент часу ti VZi=Zi/ti; VXi=Xi/ti; VYi=Yi/ti. Будемо вважати, що в т. A VA R , де відома кутова швидкість обертання висівного дис ка, a VAX VA cos , VAZ VA sin , VAY 0 . Маючи координати для Z в точках , V , а таZA,Z1,Z2,Z3,Zн відповідні значення VZA Zi кож VXA , VXi та VYA , VYi визначаємо апрокси Комп’ютерна верстка Л. Ціхановська 6 муючі функції VX,VY,VZ, пo яких у будь-якій точці траєкторії визначаються швидкість насінини по величині та напрямку. Джерела інформації: 1. Заявка №201001451 від 12.02.2010. 2. Патент №41300, від 12.05.2009. Бюл. № 9, 2009UA. 3. Методы вычислений на ЭВМ: Справочное пособие / Иванов В.В. - Киев: Наук. думка, 1986. С.144-217. Підписне Тираж 23 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюMethod for determining seed moving parameters at precise sowing
Автори англійськоюLushnikov Viacheslav Mykhailovych, Chaikovskyi Oleksandr Borysovych, Zlatopolskyi Fedir Yosypovych, Shmat Serhii Ivanovych, Abramova Viktoria Viktorivna, Holsha Vitalii Ihorovych
Назва патенту російськоюСпособ определения параметров движения семян при точном высеве
Автори російськоюЛушников Вячеслав Михайлович, Чайковський Александр Борисович, Златопольский Федор Иосифович, Шмат Сергей Иванович, Абрамова Виктория Викторовна, Гольша Виталий Игоревич
МПК / Мітки
Мітки: точному, руху, висіві, насінин, спосіб, визначення, параметрів
Код посилання
<a href="https://ua.patents.su/3-58027-sposib-viznachennya-parametriv-rukhu-nasinin-pri-tochnomu-visivi.html" target="_blank" rel="follow" title="База патентів України">Спосіб визначення параметрів руху насінин при точному висіві</a>
Пристрій реєстрації руху насіння при точному висіві
Номер патенту: 52727
Опубліковано: 10.09.2010
Автори: Абрамова Вікторія Вікторівна, Чайковський Олександр Борисович, Шмат Сергій Іванович, Златопольський Федір Йосипович, Лушников Вячеслав Михайлович, Гольша Віталій Ігоревич
Мітки: руху, точному, реєстрації, висіві, насіння, пристрій
Формула / Реферат:
Пристрій реєстрації руху насіння при точному висіві, який містить оптико-електронний блок реєстрації прольоту насіння, двома сторонами якого є оптичні пристрої паралельного світлового потоку навпроти яких розміщені світлочутливі лінійки, з'єднані через швидкодіючі інтерфейси з персональним комп'ютером, який відрізняється тим, що оптико-електронний блок реєстрації прольоту насіння є трикоординатним, має вигляд прямокутного короба з...
Спосіб визначення швидкості руху насіння в потоці
Номер патенту: 41300
Опубліковано: 12.05.2009
Автори: Лушников Вячеслав Михайлович, Пархоменко Михайло Давидович, Гольша Віталій Ігорович, Пархоменко Юрій Михайлович
Мітки: спосіб, швидкості, насіння, визначення, руху, потоці
Формула / Реферат:
Спосіб визначення швидкості руху насіння в потоці, що включає використання пристрою реєстрації насіння в потоці, в якому насіння, що пролітає через верхню та нижню зони паралельних площин контролю, виконаних кожна у вигляді прямокутника з координатами X та Y, двома сторонами якого є оптичні пристрої паралельного світлового потоку з імпульсними джерелами світла та блоками їх запуску, навпроти яких розміщені дискретні світлочутливі лінійки,...
Пристрій реєстрації руху насіння при точному висіві
Номер патенту: 53034
Опубліковано: 27.09.2010
Автори: Абрамова Вікторія Вікторівна, Златопольський Федір Йосипович, Чайковський Олександр Борисович, Гольша Віталій Ігоревич, Шмат Сергій Іванович, Лушников Вячеслав Михайлович
Мітки: точному, насіння, реєстрації, пристрій, руху, висіві
Формула / Реферат:
Пристрій реєстрації руху насіння при точному висіві, який містить джерело імпульсного світла, який відрізняється тим, що на висівному апараті, який знаходиться на випробувальному стенді, по його задній стінці за зоною руху насіння вертикально встановлена координатна сітка, на відстані не менше 1 м від сітки встановлений цифровий фотоапарат так, що об'єктив знаходиться на рівні центра координатної сітки, джерело імпульсного світла встановлено...
Пристрій реєстрації руху насіння при точному висіві
Номер патенту: 54668
Опубліковано: 25.11.2010
Автори: Шмат Сергій Іванович, Чайковський Олександр Борисович, Гольша Віталій Ігорович, Волков Ігор Васильович, Абрамова Вікторія Вікторівна, Лушников Вячеслав Михайлович
Мітки: реєстрації, руху, пристрій, насіння, точному, висіві
Формула / Реферат:
Пристрій реєстрації руху насіння при точному висіві, який містить джерело імпульсного світла, який відрізняється тим, що на висівному апараті, який знаходиться на випробувальному стенді, замість сошника по його задній стінці поза зоною руху насіння вертикально встановлена координатна сітка, на рівні центра координатної сітки на відстані не менше 1 м встановлений швидкісний реєстратор зображення зі швидкістю знімання не менше 100 кадрів в...
Спосіб визначення координат насінин в потоці
Номер патенту: 32168
Опубліковано: 12.05.2008
Автори: Пархоменко Юрій Михайлович, Чайковський Олександр Борисович, Лушников Вячеслав Михайлович, Коптьолова Тетяна Миколаївна, Пархоменко Михайло Давидович
Мітки: спосіб, координат, визначення, насінин, потоці
Формула / Реферат:
Спосіб визначення координат насінин в потоці пристроєм реєстрації, який складається з оптико-електронного блока реєстрації зернин, що пролітають через зону контролю, яка виконана у вигляді прямокутника, блока синхронізації, що забезпечує почергово включення кожного з джерел імпульсного світла та синхронне з ним підключення потрібних фотоприймачів, та ЕОМ, яка обробляє сигнали блока реєстрації насінин, який відрізняється тим, що сторонами...
Попередній патент: Спосіб розмірної обробки отворів електричною дугою
Наступний патент: Спосіб обробки металів різанням
Випадковий патент: Спосіб корекції психоемоційного стану людини