Спосіб підвищення точності визначення параметрів руху космічного апарата
Номер патенту: 56376
Опубліковано: 10.01.2011
Автори: Загорулько Олександр Миколайович, Ожінський Віктор Васильович, Топольницький Павло Петрович, Парфенюк Василь Григорович

Формула / Реферат
Спосіб підвищення точності визначення параметрів руху космічного апарата, який відрізняється тим, що в апаратурі супутникової навігації дані із навігаційного обчислювача надходять до блока робастної обробки, який проводить їх згладжування з використанням завадостійких (робастних) статистичних процедур та видає уточнені параметри руху космічного апарата.
Текст
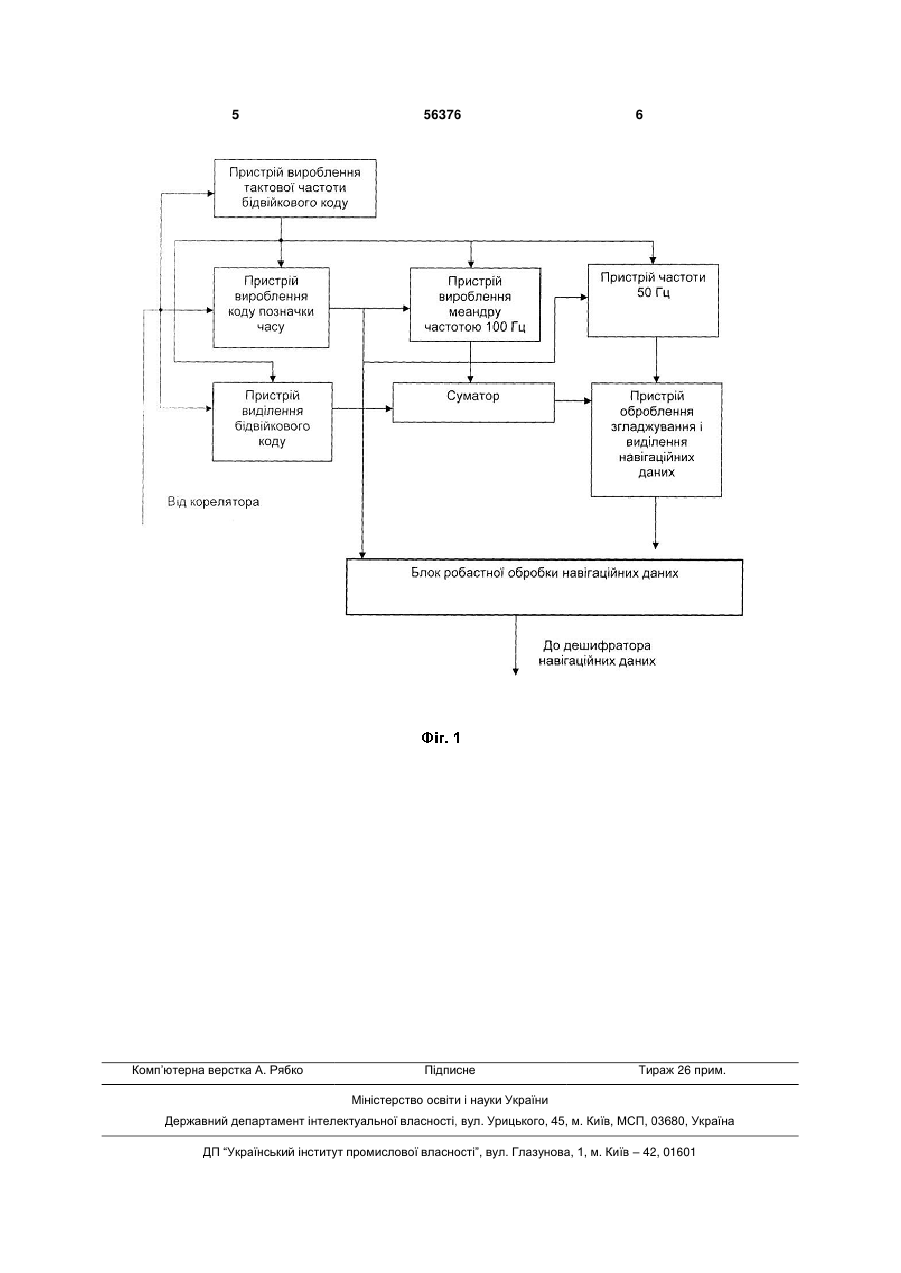
Спосіб підвищення точності визначення параметрів руху космічного апарата, який відрізняється тим, що в апаратурі супутникової навігації дані із навігаційного обчислювача надходять до блока робастної обробки, який проводить їх згладжування з використанням завадостійких (робастних) статистичних процедур та видає уточнені параметри руху космічного апарата. (19) (21) u201008384 (22) 05.07.2010 (24) 10.01.2011 (46) 10.01.2011, Бюл.№ 1, 2011 р. (72) ОЖІНСЬКИЙ ВІКТОР ВАСИЛЬОВИЧ, ПАРФЕНЮК ВАСИЛЬ ГРИГОРОВИЧ, ТОПОЛЬНИЦЬКИЙ ПАВЛО ПЕТРОВИЧ, ЗАГОРУЛЬКО ОЛЕКСАНДР МИКОЛАЙОВИЧ (73) ОЖІНСЬКИЙ ВІКТОР ВАСИЛЬОВИЧ 3 - похибки зумовлені завадами, один з найбільш значущих видів похибок, вони бувають природними та штучно створеними; - похибки через багатопроменеве поширення; - похибки частото-часового забезпечення. При розрахунку координат використовують ряд методів: - псевдо далекомірний метод розрахунку; - ітеративний метод розрахунку; - диференціальний метод розрахунку. Дані методи частково враховують різноманітні похибки, але на практиці значне зниження точності відбувається за рахунок завад. Значні відхилення від реальних значень відкидається за рахунок фільтрування за правилом 3 . Незначні ж відхилення при припущенні щодо нормального розподілу похибок погіршують точність визначення параметрів руху КА. Одним з головних елементів апаратури супутникової навігації є навігаційний обчислювач, у якому розв'язуються задачі первинного та вторинного оброблення навігаційної інформації, що надходить від супутників, а також здійснює керування потоками інформації між складовими апаратури супутникової інформації. Навігаційний обчислювач фізично поділяється на сигнальний і цифровий процесори. Сигнальний процесор працює з сигналами під час первинного оброблення інформації. Цифровий процесор виконує обчислювальні процедури, передбачені алгоритмами навігаційних визначень. За принципом дії - це обчислювальна машина, що працює в реальному часі і тому може реалізовувати додатково робастні процедури. Схема роботи навігаційного обчислювача з блоком робастної обробки при ведена на Фіг.1. Найпоширенішим способом згладжування результатів спостереження є метод найменших квадратів. Нехай ми маємо n вимірів координати xxв1...хвn, для оцінок p координати x1...x p і вони поˆ ˆ в'язані співвідношенням [3, 4] p xi ˆ ij x j ui (1) i 1 де ij - певні відомі коефіцієнти, а ui - незалежні випадкові величини, які мають приблизно однакові функції розподілу. В матричній формі ˆ x AX u (2) В класичній постановці задача зводиться до мінімізації суми квадратів 56376 4 2 p n ˆ ij x j xi i 1 min (3) j 1 Або, що еквівалентно, до вирішення системи р рівнянь, отриманих диференціюванням виразу (3): p n ˆ ij x j xi i 1 ˆ xj 0 (4) j 1 Але такий підхід має недолік, відомо, що викиди, викликані наявністю у розподілів, які описують похибки вимірів, більш важких в порівнянні з нормальним розподілом хвостів чи просто великими помилками результатів вимірювань дуже сильно впливають на оцінку методом найменших квадратів. Тому пропонується блок робастної обробки, який буде проводити обробку вимірів за робастною процедурою, мінімізуючи менш швидко зростаючу функцію - функцію від залишків [3, 4]: p n ˆ ij x j xi i 1 min (5) j 1 або розв'язати систему p n ˆ ij x j xi i 1 де ˆ xk 0, k 1,...,p (6) j 1 x 1 2 x 2 при х c; 1 2 cx c при х c. 2 Константа с визначає ступінь завадостійкості. Оптимальні значення с знаходяться в інтервалі [ , 2 ], де - стандартне відхилення спостережень. Розв'язання системи (6) проводиться, використовуючи стандартні ітераційні процедури ураховуючи характеристики обчислювальних можливостей апаратури супутникової навігації. Перелік посилань: 1. Загорулько А.Н. Особенности программных способов управления космическими аппаратами при однопунктной технологии. // Моделювання та інформаційні технології: Збірник, наукових, праць. X.: НАНУ, Інститут проблем моделювання в енергетиці імені Г.Є. Пухова. - 2005, - Вип. 32. - С.8087. 2. Бабак В.П., Конін В.В., Харченко В.П. Супутникова радіонавігація. - К.: Техніка, 2004. - 328с. 3. Устойчивые статистические методы оценки данных / Пер. с англ. Ю.И. Малахова; Под ред. Н.Г. Волкова. - М.: Машиностроение, 1984. - 232с. 4. Хьюбер Дж.П. Робастность в статистике: Пер. с англ. - М. Мир, 1984. - 384с., ил. 5 Комп’ютерна верстка А. Рябко 56376 6 Підписне Тираж 26 прим. Міністерство освіти і науки України Державний департамент інтелектуальної власності, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюAccuracy increase method for trajectory parameters of space vehicle
Автори англійськоюOzhinskyi Viktor Vasyliovych, Parfeniuk Vasyl Hryhorovych, Topolnytskyi Pavlo Petrovych, Zahorulko Oleksandr Mykolaiovych
Назва патенту російськоюСпособ повышения точности определния параметров движения космического аппарата
Автори російськоюОжинский Виктор Васильевич, Парфенюк Василий Григорьевич, Топольницкий Павел Петрович, Загорулько Александр Николаевич
МПК / Мітки
МПК: G05B 17/00
Мітки: параметрів, точності, космічного, спосіб, апарата, визначення, підвищення, руху
Код посилання
<a href="https://ua.patents.su/3-56376-sposib-pidvishhennya-tochnosti-viznachennya-parametriv-rukhu-kosmichnogo-aparata.html" target="_blank" rel="follow" title="База патентів України">Спосіб підвищення точності визначення параметрів руху космічного апарата</a>
Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата
Номер патенту: 83861
Опубліковано: 26.08.2008
Автори: Шептун Юрій Дмитрович, Манойленко Олександр Олексійович
МПК: B64G 1/24, G05B 15/00
Мітки: кутового, ракети-носія, космічного, руху, спосіб, параметрів, апарата, регулювання
Формула / Реферат:
Спосіб регулювання параметрів кутового руху ракети-носія космічного апарата шляхом вимірювання кутових швидкостей та кутів тангажа, рискання і крену, порівняння виміряних значень з заданими, формування основних сигналів керування ракетою згідно з помилками регулювання, який відрізняється тим, що на кожному такті керування ракетою з моменту відключення рухомої установки і до моменту відділення космічного апарата формують в каналах тангажа і...
Спосіб визначення поточних навігаційних параметрів космічного апарата
Номер патенту: 32157
Опубліковано: 12.05.2008
Автори: Загорулько Олександр Миколайович, Богом'я Володимир Іванович
МПК: B64G 1/24
Мітки: параметрів, поточних, навігаційних, визначення, спосіб, космічного, апарата
Формула / Реферат:
Спосіб визначення поточних навігаційних параметрів космічного апарата, який полягає в тому, що за допомогою наземних оптичних вимірювальних систем проводять спостереження та визначення поточних навігаційних параметрів космічного апарата (КА) на тіньовій (неосвітленій) ділянці орбіти за відсутності відображеного від конструкції КА сонячного світла, який відрізняється тим, що для освітлювання використовують штучне джерело випромінювання, яке...
Спосіб визначення орієнтації космічного апарата
Номер патенту: 51673
Опубліковано: 26.07.2010
Автори: Ян Ке, Кучерук Сергій Михайлович, Костенко Борис Олександрович, Козелкова Катерина Сергіївна, Загорулько Олександр Миколайович
МПК: B64G 1/24
Мітки: спосіб, космічного, визначення, орієнтації, апарата
Формула / Реферат:
Спосіб визначення орієнтації космічного апарата (КА), який полягає в тому, що параметри орієнтації КА відносно центра мас обраховують за інформацією вихідної потужності панелей сонячних батарей, пов'язаної з кутом Сонця відносно їх робочих поверхонь, який відрізняється тим, що як датчикові пристрої використовують сонячні батареї, розміщені в трьох ортогональних площинах.
Система стабілізації кутового руху космічного апарата
Номер патенту: 35087
Опубліковано: 26.08.2008
Автори: Пхайко Ірина Вікторівна, Бандура Іван Миколайович, Симонов Володимир Федорович
МПК: B64G 1/24
Мітки: космічного, апарата, кутового, руху, система, стабілізації
Формула / Реферат:
Система стабілізації кутового руху космічного апарата, що складається з датчика відхилення кута тангажа і датчика кутової швидкості, виходи яких послідовно через підсилювач-перетворювач, рульові приводи з потенціометром у зворотному зв'язку підключені до виконавчого органа, яка відрізняється тим, що в неї введений нечіткий регулятор, що містить блок формування і розпізнавання образів, вхід якого з'єднаний з виходами датчиків відхилення кута...
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем
Номер патенту: 69794
Опубліковано: 15.09.2004
Автори: Рудіч Олександр Васильович, Нестерович Андрій Геннадійович, Піскорж Володимир Вікторович, Верещак Олександр Петрович
Мітки: спосіб, радіонавігаційних, руху, супутникових, визначення, систем, сигналами, користувача, параметрів
Формула / Реферат:
Спосіб визначення параметрів руху користувача за сигналами супутникових радіонавігаційних систем, що включає в себе прийом навігаційною апаратурою користувача навігаційних радіосигналів космічних апаратів супутникових радіонавігаційних систем, завдання навігаційною апаратурою користувача моментів часу прийому сигналів, визначення для кожного космічного апарата супутникових радіонавігаційних систем, сигнали якого були прийняті навігаційною...
Попередній патент: Спосіб керування пристроєм гідравлічного видалення окалини
Наступний патент: Гідравлічна машина самойленка
Випадковий патент: Мон накопичувач дози іонізуючих випромінювань