Зубчато-інерційний варіатор
Формула / Реферат
Зубчато-інерційний варіатор, що містить диференціал у складі чотирьох конічних зубчатих коліс: двох пліч і двох сателітів, розташованих у корпусі диференціала, перше із пліч зачеплене із двома сателітами, які у свою чергу зачеплені із другим із пліч так, що вершини утворюючих усіх конічних коліс сполучені, а їх осі розташовані в одній площині, кожне із пліч установлене в підшипникові опори корпуса диференціала, а кожний сателіт посаджений своєю підшипниковою опорою на палець, установлений у корпус диференціала, з можливістю передачі обертання від одного обертового із пліч через сателіти корпусу диференціала при загальмованому другому із пліч, і з можливістю передачі обертання від обертового із пліч при блокуванні двох пліч між собою корпусу диференціала з обертанням усього диференціала як одне ціле, який відрізняється тим, що корпус диференціала, що відповідний виходу, з'єднаний з першим циліндричним зубчатим колесом, а перше із пліч з'єднане із другим циліндричним зубчатим колесом і пов'язане з маховиком, і зубчаті вінці першого й другого коліс зачеплені із зубами вінців блок-шестірні, посадженої в нерухомі підшипникові опори, з можливістю вільного взаємопов'язаного обертання корпуса диференціала із сателітами та з першим із пліч разом з першим і другим колесами та із блок-шестірнею і з обертанням маховика у відносному рухові при нерухомому другому із пліч диференціала, воно відповідне входу, і з можливістю обертання другого із пліч у переносному рухові, з передачею переносного руху обертання від другого із пліч корпусу диференціала в складову його абсолютного руху, при зменшенні відносної швидкості обертання корпуса диференціала разом зі зменшенням швидкостей обертання першого із пліч і сателітів у їх у відносному рухові та з одночасним частковим зменшенням швидкості маховика, з виникненням у маховику інерційних крутних моментів, направлених на збереження існуючої раніше відносної кутової швидкості маховика із швидкостями першого із пліч із сателітами та з корпусом диференціала, з підсумовуванням швидкостей у новому абсолютному рухові: нової швидкості переносного руху обертання другого із пліч з попередньою швидкістю відносного руху обертання корпуса диференціала, взаємопов'язаного із сателітами, першим із пліч з першим і другим колесами та блок-шестірнею і з маховиком.
Текст
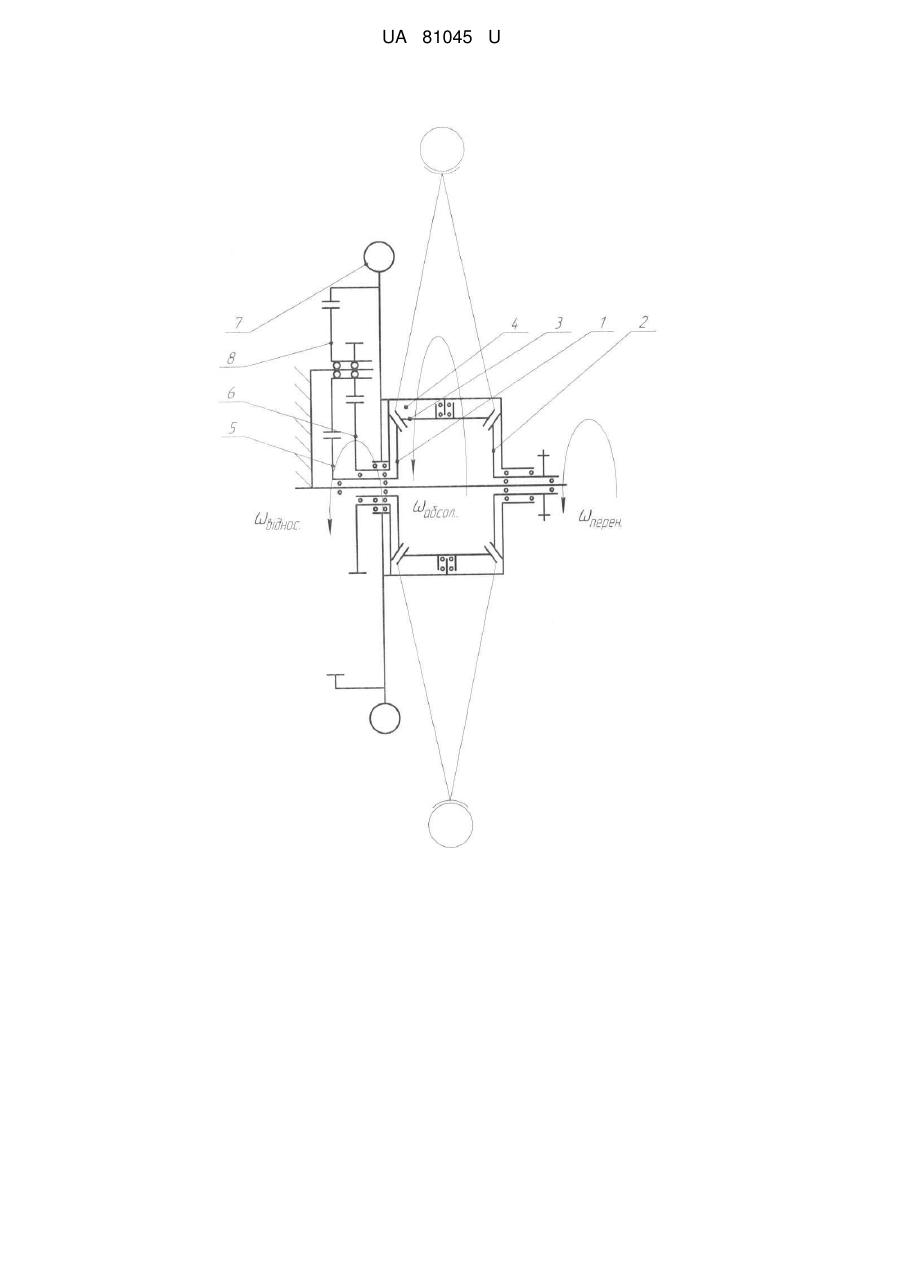
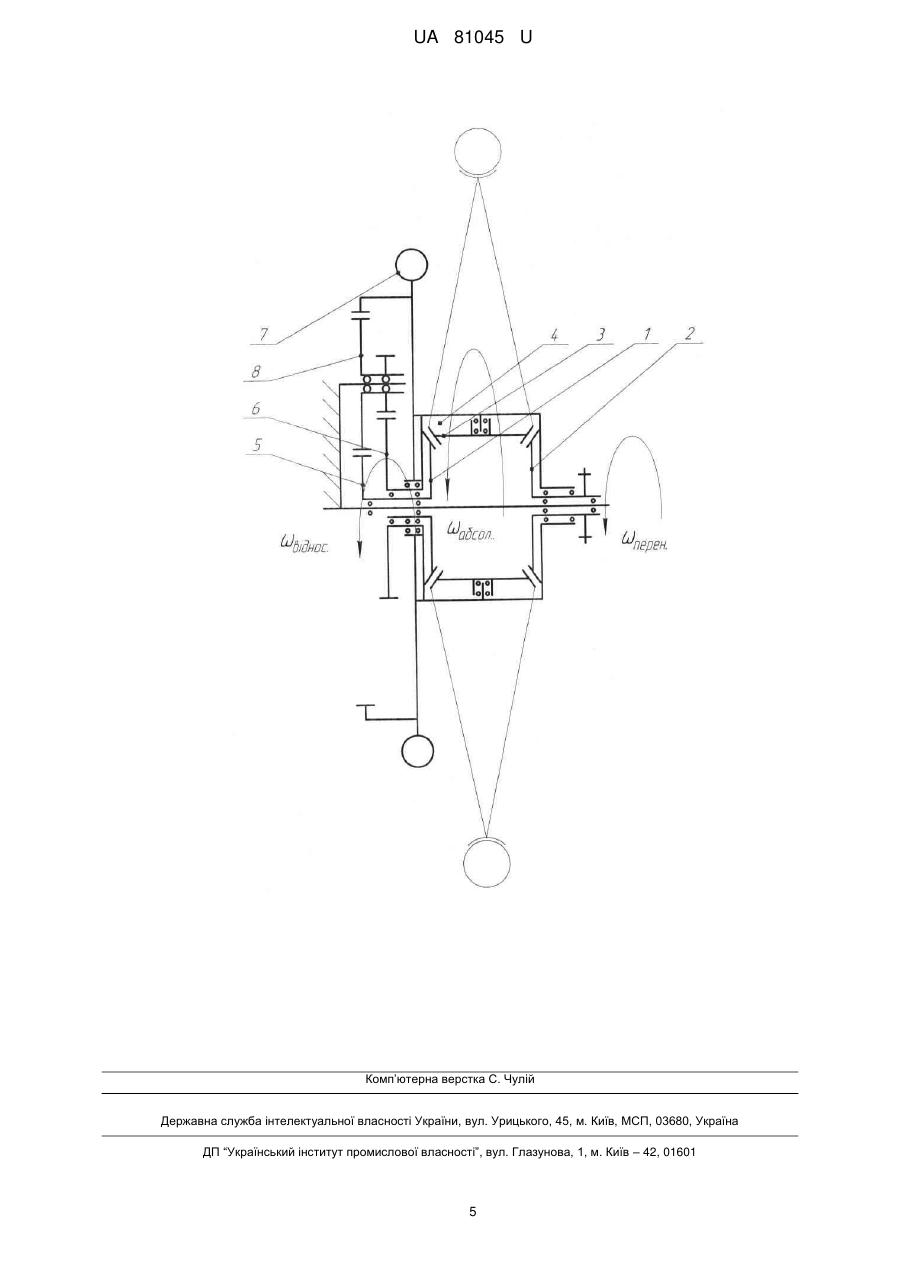
Реферат: UA 81045 U UA 81045 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до зубчатих змінних передач і до маховиків та може бути використана на сухопутних транспортних засобах: велосипеді, мотоциклі. автомобілі, залізничному локомотиві як елемент трансмісії для зміни швидкості руху. Механіка є самим прадавнім розділом науки фізично, яка народилася в далекій давнині в епоху становлення Цивілізації, з потреб людини у використанні різних пристроїв: зброї, інструментів і їх пристосувань, транспортних засобів, з їхнім приладдям, для своєї життєдіяльності, знання якої розвивалася винятково експериментальним шляхом. Але після епохи Великих географічних відкриттів прийшла епоха завоювання з її війнами, що вимагають підвищеної мобілізації ресурсів як країн у цілому, із систематичним підходом до управління, виробництва різних товарів, планового постачання, торгівлі і систем різних знань, так і до мобілізації потенціалів окремих особистостей з їхніми школами - напрямками в різних системах знань. Це дало імпульс розвитку систематичних знань, що розвиваються як емпіричним, так і теоретичним шляхом. На підставі цієї системи знань були запропоновані різні пристрої, які в минулому розроблені й надалі виконані. Але по теперішній час хоча й був запропонований (теминологічно) "гіпотетичний кінематичний варіатор", але він так і не був розроблений і виготовлений, а всі наявні по теперішній час розробки під іменем "кінематичний варіатор", що працюють на основі різних фізичних засад, як таким не є. Але найбільш близьким по засадах роботи є загальновідомий фрикційний варіатор. У фрикційному варіаторі незмінну кутову швидкість вхідного елемента використовують у вигляді набору миттєвих лінійних швидкостей передавальних елементів, величину яких є можливість змінювати при зміні розташування передавальних елементів щодо осі обертання вхідного елемента, при цьому передавальні елементи мають фрикційний контакт зі сприймаючим елементом, набір миттєвих лінійних швидкостей якого й перетвориться в кутову швидкість вихідного елемента. При цьому при зміні розташування передавальних елементів змінюється шаг зачеплення передавальних елементів зі сприймаючим елементом, який у фрикційному варіаторі не відіграє істотної ролі, але в зачепленні кінематичних елементів (наприклад і гіпотетичного кінематичного варіатора ) крок зачеплення має ключову роль, і при зміні розташування передавальних і відповідно сприймаючих елементів змінюється крок зачеплення і абсолютні величини взаємного розташування передавального і сприймаючого елементів, що сприймається як масштабування пристрою, але не відносні величини передавального до сприймаючого, що фактично й впливає на можливість варіювання кутової швидкості. Таким чином, створення кінематичного варіатора заборонене за законами математики, а не фізики. Наслідком чого і є наявність технічних і технологічних прогалин у зазначеній галузі знань, навіть не дивлячись на наявні значні потреби в зазначеному пристрої у зв'язку з розвитком сучасного автомобілебудування. Найбільш перспективним у даній ситуації є можливість східчастої зміни швидкості, не обмеженої по верхній межі за рахунок послідовного підсумовування збільшення приросту змінюваної в певному обмеженому коридорі швидкості на вході. Загальновідомий диференціал, уміщуючий чотири конічних зубчатих колеса: двох пліч і двох сателітів, розташованих у корпусі диференціала, перше із пліч зачеплене із двома сателітами, які у свою чергу зачеплені із другим із пліч так, що вершини утворюючих усіх конічних коліс сполучені, а їх осі розташовані в одній площині, кожне із пліч установлене в підшипникові опори корпуса диференціала, а кожний сателіт посаджений своєю підшипниковою опорою на палець, установлений у корпус диференціала, з можливістю передачі обертання від одного обертового із пліч через сателіти корпусу диференціала при загальмованому другому із пліч, і з можливістю передачі обертання від обертового із пліч при блокуванні двох пліч між собою корпусу диференціала з обертанням усього диференціала як одне ціле. Недоліком загальновідомого диференціала є відсутність можливості вільного обертання корпуса диференціала щодо пліч. Найбільш перспективним у даній ситуації є можливість східчастої зміни швидкості, не обмеженої по верхньому рівню, за рахунок послідовного збільшення приросту змінюваної в певному обмеженому коридорі швидкості на вході з одержанням на виході необмеженого росту прибагаторазовому імпульсному або коливальному, у вигляді крутильних коливань, обертанні одного із пліч. В основу корисної моделі поставлена задача створення зубчато-інерційного варіатора, що містить диференціал у складі чотирьох конічних зубчатих коліс: двох пліч і двох сателітів, розташованих у корпусі диференціала, перше із пліч зачеплене із двома сателітами, які у свою чергу зачеплені із другим із пліч так, що вершини утворюючих усіх конічних коліс сполучені, а їх осі розташовані в одній площині, кожне із пліч установлене в підшипникові опори корпуса диференціала, а кожний сателіт посаджений своєю підшипниковою опорою на палець, установлений у корпус диференціала, з можливістю передачі обертання від одного обертового 1 UA 81045 U 5 10 15 20 25 30 35 40 45 50 55 60 із пліч через сателіти корпусу диференціала при загальмованому другому із пліч, і з можливістю передачі обертання від обертового із пліч при блокуванні двох пліч між собою корпусу диференціала з обертанням усього диференціала як одне ціле, у якому завдяки тому, що корпус диференціала, він відповідей виходу, з'єднаний з першим циліндричним зубчатим колесом, а перше із пліч з'єднане із другим циліндричним зубчатим колесом і пов'язане з маховиком, і зубчаті вінці першого й другого коліс зачеплені із зубами вінців блок-шестірні, посадженої в нерухомі підшипникові опори, з можливістю вільного взаємопов'язаного обертання корпуса диференціала із сателітами та з першим із пліч разом з першим і другим колесами та із блок-шестірнею, і з обертанням маховика у відносному рухові при нерухомому другому із пліч диференціала, воно відповідне входу, і з можливістю обертання другого із пліч у переносному рухові, з передачею переносного руху обертання від другого із пліч корпусу диференціала в складову його абсолютного руху, при зменшенні відносної швидкості обертання корпуса диференціала разом зі зменшенням швидкостей обертання першого із пліч і сателітів у їх відносному рухові та з одночасним частковим зменшенням швидкості маховика, з виникненням у маховику інерційних крутних моментів, направлених на збереження існуючої раніше відносної кутової швидкості маховика із швидкостями першого із пліч із сателітами та з корпусом диференціала, з підсумовуванням швидкостей у новому абсолютному рухові: нової швидкості переносного руху обертання другого із пліч з попередньою швидкістю відносного руху обертання корпуса диференціала, взаємопов'язаного із сателітами, першим із пліч з першим і другим колесами на блок-шестірню і з маховиком, забезпечується покроково, після кожного гальмування входу з новим імпульсом зростання швидкості входу необмежено-східчасто збільшує кутову швидкість виходу - корпуса диференціала, і за рахунок цього розширені технічні можливості зубчатих передач і маховиків, чим підвищені технічні можливості транспортних засобів, а цим підвищена ефективність їх використання. Поставлена задача вирішується зубчато-інерційним варіатором, що містять диференціал у складі чотирьох конічних зубчатих коліс: двох пліч і двох сателітів. розташованих у корпусі диференціала, перше із пліч зачеплене із двома сателітами, які у свою чергу зачеплені із другим із пліч так, що вершини утворюючих усіх конічних коліс сполучені, а їх осі розташовані в одній площині, кожне із пліч установлене в підшипникові опори корпуса диференціала, а кожний сателіт посаджений своєю підшипниковою опорою на палець, установлений у корпус диференціала, з можливістю передачі обертання від одного обертового із пліч через сателіти корпусу диференціала при загальмованому другому із пліч, і з можливістю передачі обертання від обертового із пліч при блокуванні двох пліч між собою корпусу диференціала з обертанням усього диференціала як одне ціле, у якому відповідно до корисної моделі, корпус диференціала, що відповідний виходу, з'єднаний з першим циліндричним зубчатим колесом, а перше із пліч з'єднане із другим циліндричним зубчатим колесом і пов'язане з маховиком, і зубчаті вінці першого й другого коліс зачеплені із зубами вінців блок-шестірні, посадженої в нерухомі підшипникові опори, з можливістю вільного взаємопов'язаного обертання корпуса диференціала із сателітами та з першим із пліч разом з першим і другим колесами та із блок-шестірнею, і з обертанням маховика у відносному рухові при нерухомому другому із пліч диференціала, воно відповідне входу, і з можливістю обертання другого із пліч у переносному рухові, з передачею переносного руху обертання від другого із пліч корпусу диференціала в складову його абсолютного руху, при зменшенні відносної швидкості обертання корпуса диференціала разом зі зменшенням швидкостей обертання першого із пліч і сателітів у їх у відносному рухові та з одночасним частковим зменшенням швидкості маховика, з виникненням у маховику інерційних крутних моментів, направлених на збереження існуючої раніше відносної кутової швидкості маховика із швидкостями першого із пліч із сателітами та з корпусом диференціала, з підсумовуванням швидкостей у новому абсолютному рухові: нової швидкості переносного руху обертання другого із пліч з попередньою швидкістю відносного руху обертання корпуса диференціала, взаємопов'язаного із сателітами, першим із пліч з першим і другим колесами із блок-шестірнею і з маховиком. Корисна модель пояснюється графічними матеріалами, у яких показано устрій зубчатоінерційного варіатора. Зубчато-інерційний варіатор містить (див. графічні матеріали) диференціал у складі чотирьох конічних зубчатих коліс: двох пліч - 1, 2 і двох сателітів - 3, розташованих у корпусі - 4 диференціала, перше із пліч - 1 зачеплене із двома сателітами – 3, які у свою чергу зачеплені із другим із пліч - 2 так, що вершини утворюючих усіх конічних коліс - 1, 2, 3 сполучені, а їх осі розташовані в одній площині, кожне із пліч – 1, 2 установлене в підшипникові опори корпуса - 4 диференціала, а кожний сателіт - 3 посаджений своєю підшипниковою опорою на палець, установлений у корпус - 4 диференціала, з можливістю передачі обертання від одного 2 UA 81045 U 5 10 15 20 25 30 35 40 45 50 55 обертового із пліч - 1 через сателіти корпусу - 4 диференціала при загальмованому другому із пліч - 2, і з можливістю передачі обертання від одного обертового із пліч-1 при блокуванні двох пліч - 1, 2 між собою корпусу - 4 диференціала з обертанням усього диференціала як одне ціле, корпус - 4 диференціала, що відповідний виходу, з'єднаний з першим циліндричним зубчатим колесом – 5, а перше із пліч - 1 з'єднане із другим циліндричним зубчатим колесом - 6 і пов'язане з маховиком-7, зубчаті вінці першого-5 й другого-6 коліс зачеплені із зубами вінців блок-шестірні - 8, посадженої в нерухомі підшипникові опори, з можливістю вільного взаємопов'язаного обертання корпуса - 4 диференціала із сателітами - 3 та з першим із пліч - 1 разом з першим - 5 і другим - 6 колесами та із блок-шестірнею-8 і з обертанням маховика-7 у відносному рухові при нерухомому другому із пліч - 2 диференціала, воно відповідне входу, і з можливістю обертання другого із пліч - 2 у переносному рухові, з передачею переносного руху обертання від другого із пліч - 2 корпусу - 4 диференціала в складову його абсолютного руху, при зменшенні відносної швидкості обертання корпуса - 4 диференціала разом зі зменшенням швидкостей обертання першого із пліч-1 і сателітів-3 у їх відносному рухові та з одночасним частковим зменшенням швидкості маховика-7, з виникненням у маховику-7 інерційних крутних моментів, направлених на збереження існуючої раніше відносної кутової швидкості маховика - 7 із швидкостями першого із пліч-1 із сателітами-3 та з корпусом-4 диференціала, з підсумовуванням швидкостей у новому абсолютному рухові: нової швидкості переносного руху обертання другого із пліч-2 з попередньою швидкістю відносного руху обертання корпуса - 4 диференціала, взаємопов'язаного із сателітами-3, першим із пліч-1 з першим-5 і другим-6 колесами на блок-шестірнею - 8 і з маховиком - 7. Зубчато-інерційний варіатор працює в такий спосіб. У вихідному положенні все -1, 2, 3, 4, 5, 6, 7, 8 зупинене. При першому примусовому безперервному обертанні входу - 2 (розбігу входу 2) обертання передається через сателіти -3 на перше із пліч - 1 з маховиком - 7 і корпус – 4, обертання яких взаємозалежне між колесами -5, 6 і блок шестірнею-8, і на виході - 4 здійснене примусове обертання. При примусовій зупинці входу - 2 (гальмуванні входу - 2) після примусового обертання в режимі одиночного імпульсу (розбігу входу - 2), наприклад на велосипеді, кінематичний зв'язок корпуса - 4 з одним із пліч - 1 забезпечує вільне обертання виходу - 4 з обертанням елементів диференціала - 1, 3, 4 з колесами -5, 6 і блок-шестірнею - 8 відносно (нерухомого ) входу – 2, яке буде здійснювати безперервне уповільнюване обертання (вибіг виходу-4 ) за рахунок обертання маховика-7 по інерції. При повторному примусовому обертанні входу - 2 (розбігу входу - 2 ) після примусової зупинки (гальмування входу-2 ), коли кутова швидкість виходу - 4 відмінна від нуля на велосипеді ) буде здійснюватися передача переносного руху обертанням від другого із пліч -2 корпусу - 4 диференціала в складову його абсолютного руху, при зменшенні відносної швидкості обертання корпуса -4 диференціала разом зі зменшенням швидкостей обертання першого із пліч - 1 і сателітів - 3 у них у відносному рухові й з одночасним частковим зменшенням швидкості маховика-7, з виникненням у маховику - 7 інерційних крутних моментів, направлених на збереження існуючої раніше відносної кутової швидкості маховика - 7 із швидкостями першого із пліч - 1 із сателітами-3 і з корпусом - 4 диференціала, з підсумовуванням швидкостей у новому абсолютному рухові: нової швидкості переносного руху обертання корпуса - 4 диференціала, взаємозалежною із сателітами-3, першим із пліч-1 з першим-5 При примусовому обертанні входу - 2 у режимі декількох пульсацій вихід - 4 буде здійснювати покроково, після кожного гальмування входу - 2 з новим імпульсом зростання швидкості входу - 2 необмежено-східчасто збільшує кутову швидкість виходу - 4 або підтримувати на незмінному рівні (залежно від величини приросту швидкості на вході - 2). При примусовому обертанні входу - 2 (на гіпотетичному транспортному засобі ) у режимі повного крутильного коливання вихід - 4 буде здійснювати обертання з наступною зупинкою. При примусовому обертанні входу - 2 зубчато-інерційного варіатора пари зубчато-інерційних варіаторів, вихід - 4 першого з яких з'єднаний із входом - 2 другого (на мотоциклі, автомобілі, локомотиві) у режимі крутильних коливань вихід - 4 пари зубчасто-інерційних варіаторів буде здійснювати покроково, після кожного гальмування входу - 2 з новим імпульсом зростання швидкості входу - 2 необмежено-східчасто збільшує кутову швидкість виходу - 4 або підтримувати на незмінному рівні (залежно від величини приросту швидкості на вході-2 ). Техніко-економічний ефект використання зубчато-інерційного варіатора полягає в розширенні технічних можливостей зубчатих передач, що може бути використане на сухопутних транспортних засобах: велосипеді, мотоциклі, автомобілі, залізничному локомотиві, як елемент трансмісії для варіювання швидкості обертання, і цим розширені технічні можливості зубчатих 3 UA 81045 U передач, чим підвищені технічні можливості транспортних засобів і підвищена ефективність їх використання. ФОРМУЛА КОРИСНОЇ МОДЕЛІ 5 10 15 20 25 30 Зубчато-інерційний варіатор, що містить диференціал у складі чотирьох конічних зубчатих коліс: двох пліч і двох сателітів, розташованих у корпусі диференціала, перше із пліч зачеплене із двома сателітами, які у свою чергу зачеплені із другим із пліч так, що вершини утворюючих усіх конічних коліс сполучені, а їх осі розташовані в одній площині, кожне із пліч установлене в підшипникові опори корпуса диференціала, а кожний сателіт посаджений своєю підшипниковою опорою на палець, установлений у корпус диференціала, з можливістю передачі обертання від одного обертового із пліч через сателіти корпусу диференціала при загальмованому другому із пліч, і з можливістю передачі обертання від обертового із пліч при блокуванні двох пліч між собою корпусу диференціала з обертанням усього диференціала як одне ціле, який відрізняється тим, що корпус диференціала, що відповідний виходу, з'єднаний з першим циліндричним зубчатим колесом, а перше із пліч з'єднане із другим циліндричним зубчатим колесом і пов'язане з маховиком, і зубчаті вінці першого й другого коліс зачеплені із зубами вінців блок-шестірні, посадженої в нерухомі підшипникові опори, з можливістю вільного взаємопов'язаного обертання корпуса диференціала із сателітами та з першим із пліч разом з першим і другим колесами та із блок-шестірнею і з обертанням маховика у відносному рухові при нерухомому другому із пліч диференціала, воно відповідне входу, і з можливістю обертання другого із пліч у переносному рухові, з передачею переносного руху обертання від другого із пліч корпусу диференціала в складову його абсолютного руху, при зменшенні відносної швидкості обертання корпуса диференціала разом зі зменшенням швидкостей обертання першого із пліч і сателітів у їх у відносному рухові та з одночасним частковим зменшенням швидкості маховика, з виникненням у маховику інерційних крутних моментів, направлених на збереження існуючої раніше відносної кутової швидкості маховика із швидкостями першого із пліч із сателітами та з корпусом диференціала, з підсумовуванням швидкостей у новому абсолютному рухові: нової швидкості переносного руху обертання другого із пліч з попередньою швидкістю відносного руху обертання корпуса диференціала, взаємопов'язаного із сателітами, першим із пліч з першим і другим колесами та блок-шестірнею і з маховиком. 4 UA 81045 U Комп’ютерна верстка С. Чулій Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюToothed-inertial variator
Автори англійськоюChuhui Volodymyr Leonidovych
Назва патенту російськоюЗубчато-инерционный вариатор
Автори російськоюЧугуй Владимир Леонидович
МПК / Мітки
МПК: F03G 3/08, F16H 48/00
Мітки: варіатор, зубчато-інерційний
Код посилання
<a href="https://ua.patents.su/7-81045-zubchato-inercijjnijj-variator.html" target="_blank" rel="follow" title="База патентів України">Зубчато-інерційний варіатор</a>
Інерційний імпульсний варіатор
Номер патенту: 64348
Опубліковано: 16.02.2004
Автор: Малишко Микола Пантелійович
МПК: F16H 29/00
Мітки: імпульсний, варіатор, інерційний
Формула / Реферат:
Інерційний імпульсний варіатор, що складається з маховика, на якому закріплені пальці сателітів, який з'єднаний з ведучим валом, а сателіти, на яких закріплені ексцентрики, зчеплені з центральною шестірнею, яка посаджена на ведений вал, який відрізняється тим, що ексцентрики розташовано на пальцях маховика з можливістю вільного, але обмеженого їх обертання відносно сателітів, уведено упори, закріплені на сателітах, і кожна пара ексцентриків...
Кулачковий варіатор та кулачково-диференціальна передача
Номер патенту: 71977
Опубліковано: 17.01.2005
Автори: Мартинюк Станіслав Станіславович, Мартинюк Сергій Станіславович
МПК: F16H 29/00, F16H 37/00
Мітки: кулачково-диференціальна, кулачковий, варіатор, передача
Формула / Реферат:
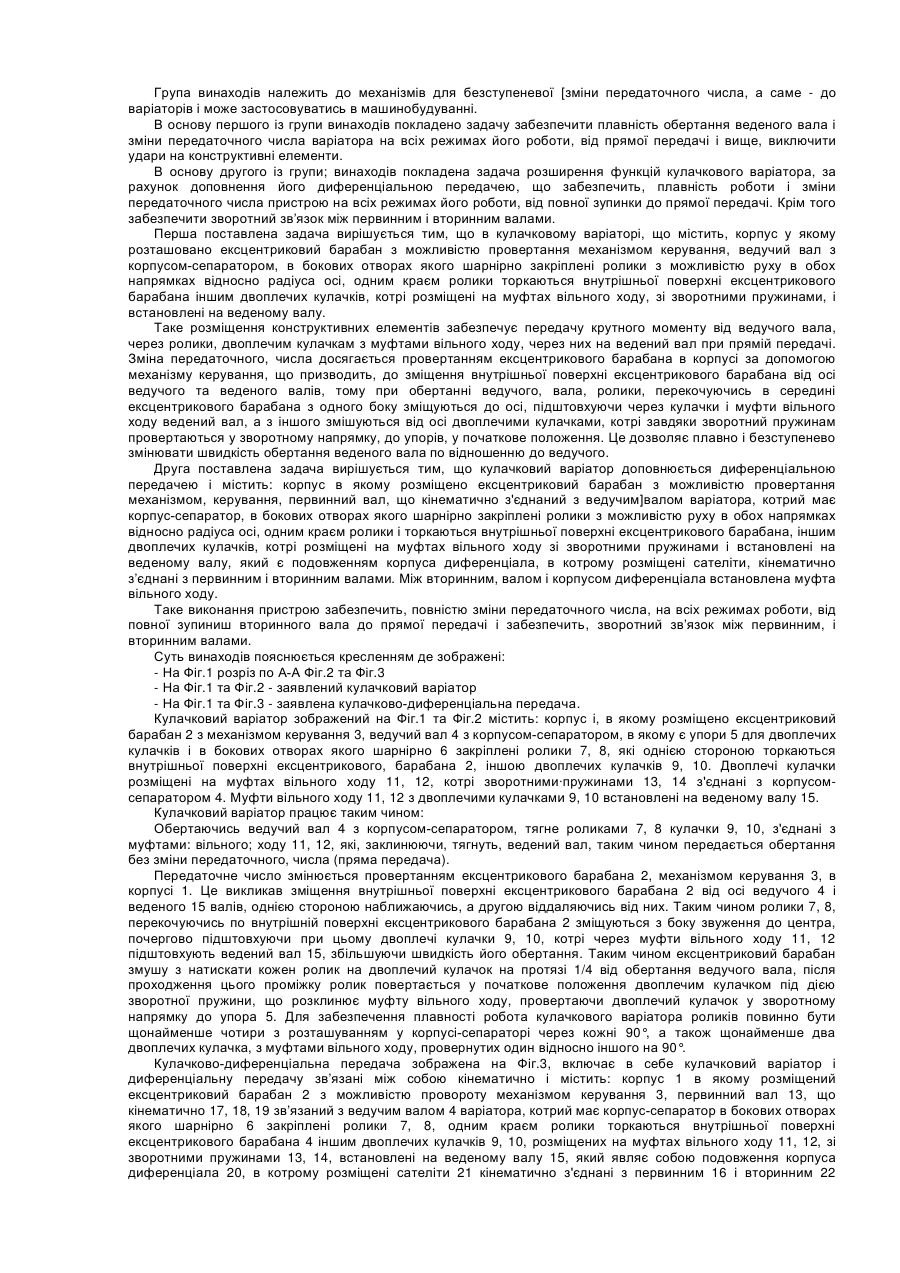
1. Кулачковий варіатор, що мaє корпус, у якому розміщений ексцентриковий барабан з механізмом керування, ведучий вал з корпусом-сепаратором, в бокових отворах якого шарнірно закріплені ролики, які одним краєм торкаються внутрішньої поверхні ексцентрикового барабана, іншим - кулачків з муфтами вільного ходу і зворотними пружинами, розміщених на веденому валу.2. Кулачково-диференціальна передача, яка включає кулачковий варіатор, яка...
Інерційний планетарний трансформатор моменту
Номер патенту: 55495
Опубліковано: 15.04.2003
Автор: Данилишин Григорій Михайлович
МПК: F16H 31/00, F16H 33/00
Мітки: інерційний, моменту, планетарний, трансформатор
Формула / Реферат:
1. Інерційний планетарний трансформатор моменту з ведучою епіциклічною шестірнею, веденим водилом щонайменше двома сателітами з кінематично зв'язаними з ними дебалансами, який відрізняється тим, що кожен з дебалансів встановлений з можливістю обертання відносно осі, перпендикулярної до одної з діаметральних площин відповідного сателіта, і зв'язаний з водилом конічною передачею з передаточним числом рівним одиниці, одне з коліс якої жорстко...
Інерційний планетарний трансформатор моменту
Номер патенту: 36321
Опубліковано: 15.04.2003
Автор: Данилишин Григорій Михайлович
МПК: F16H 31/00, F16H 33/00, B60K 17/06
Мітки: трансформатор, планетарний, інерційний, моменту
Формула / Реферат:
Інерційний планетарний трансформатор моменту з ведучим водилом, веденим центральним циліндричним колесом, принаймні двома сателітами з встановленими з можливістю обертання відносно осей, перпендикулярних одній з діаметральних площин кожного сателіту, дебалансами, який відрізняється тим, що кожен з дебалансів зв’язаний з водилом конічною передачею з передаточним числом рівним одиниці, причому одне з коліс конічної передачі жорстко зв'язане з...
Важільно-імпульсний варіатор
Номер патенту: 40665
Опубліковано: 27.04.2009
Автор: Чугуй Володимир Леонідович
МПК: B62M 23/00
Мітки: важільно-імпульсний, варіатор
Формула / Реферат:
Важільно-імпульсний варіатор, що містить опору хитання, з якою з'єднаний коромисловий важіль, який відрізняється тим, що коромисловий важіль виконаний у вигляді штанги, на яку посаджений повзун, що шарнірно з'єднаний з опорою хитання, з можливістю переміщення опори хитання уздовж коромислового важеля, ведучий кінець коромислового важеля шарнірно з'єднаний з повзуном кривошипно-повзунного механізму, кривошип якого відповідний входу, а ведений...
Попередній патент: Система ущільнень турбокомпресора
Наступний патент: Пристрій для дослідження технологічних властивостей керамічної сировини
Випадковий патент: Пристрій для контролю робочого ресурсу електричного двигуна