Комп’ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів
Номер патенту: 82082
Опубліковано: 25.07.2013
Автори: Пецков Роман Олександрович, Воронко Ірина Олександрівна, Козак Володимир Сергійович, Габчак Максим Костянтинович, Стасюк Олександр Іонович, Гончарова Лідія Леонідівна, Барська Наталія Дмитрівна
Формула / Реферат
Комп'ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів, що містить блок пам'яті, яка відрізняється тим, що в неї введено чотирипортовий модуль інтерфейсу, мікропроцесор, таймер, ключі, регістр, дешифратори, приймач сигналів часу, аналого-цифровий перетворювач, формувачі аналогових сигналів, причому вихід шини адреси першого порту мікропроцесора підключений до входу адреси першого дешифратора і-й (і=1,2,3,), вихід якого з'єднаний з управляючим входом і-го ключа, підключеного своїм виходом до входу і-го формувача аналогових сигналів, вихід шини даних другого порту мікропроцесора підключений до входу шини даних приймача сигналів часу, чотирипортового модуля інтерфейсу, блока пам'яті, таймера і аналого-цифрового перетворювача, підключеного своїми входами до виходів відповідних формувачів аналогових сигналів, вихід шини адреси третього порту мікропроцесора з'єднаний з входом шини адреси аналого-цифрового перетворювача, регістра, другого дешифратора, таймера, приймача сигналів часу, чотирипортового модуля інтерфейсу, вихід регістра з'єднаний з блоком пам'яті, виходи другого дешифратора підключені до відповідних входів вибору кристалу приймача сигналів часу, чотирипортового модуля інтерфейсу, аналого-цифрового перетворювача, блока пам'яті, таймераі регістра, а стробуючий вхід першого дешифратора підключений до стробуючого виходу мікропроцесора, виходи запису і читання якого з'єднані з входами запису і читання приймача сигналів часу, чотирипортового модуля інтерфейсу, аналого-цифрового перетворювача, таймера, блока пам'яті і регістра.
Текст
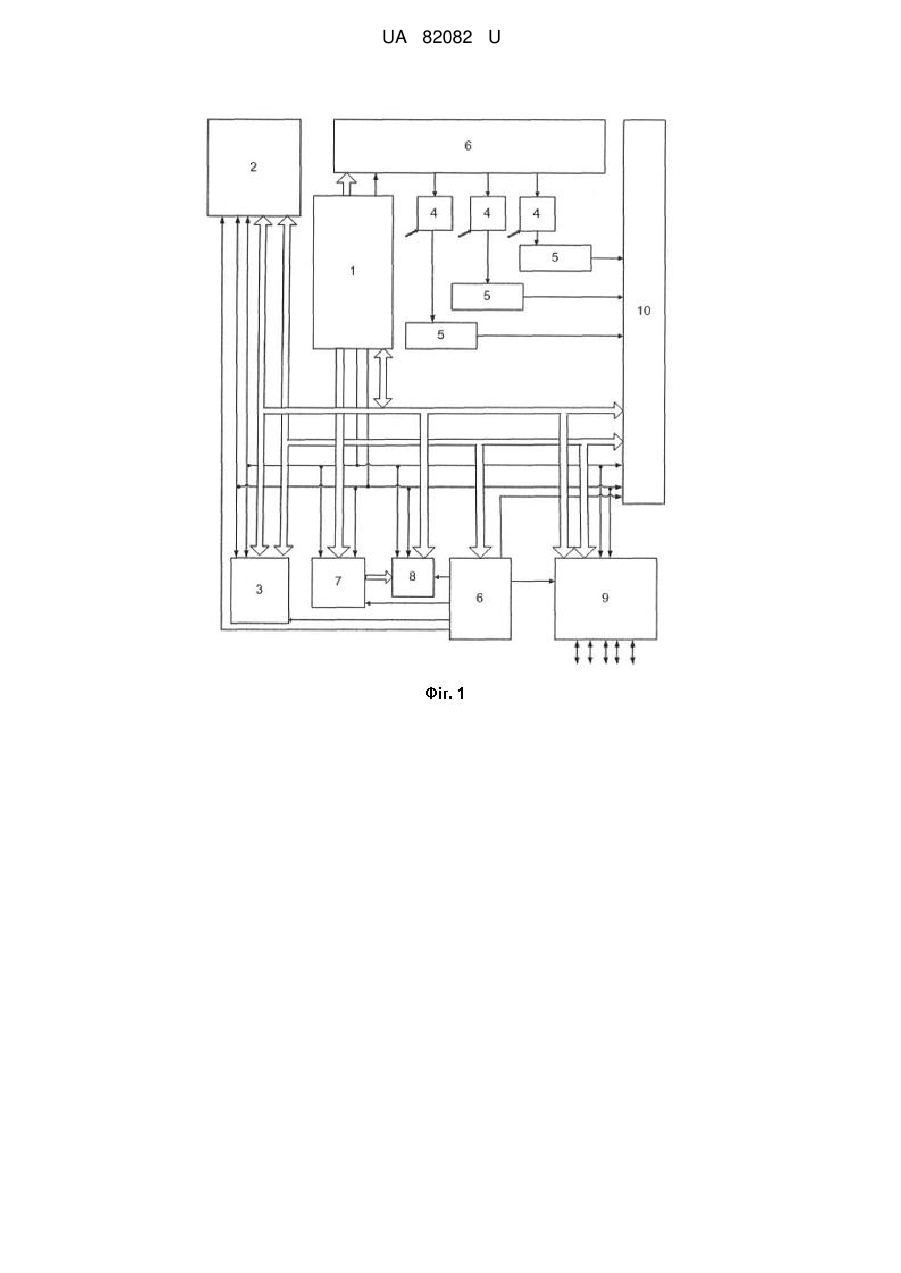
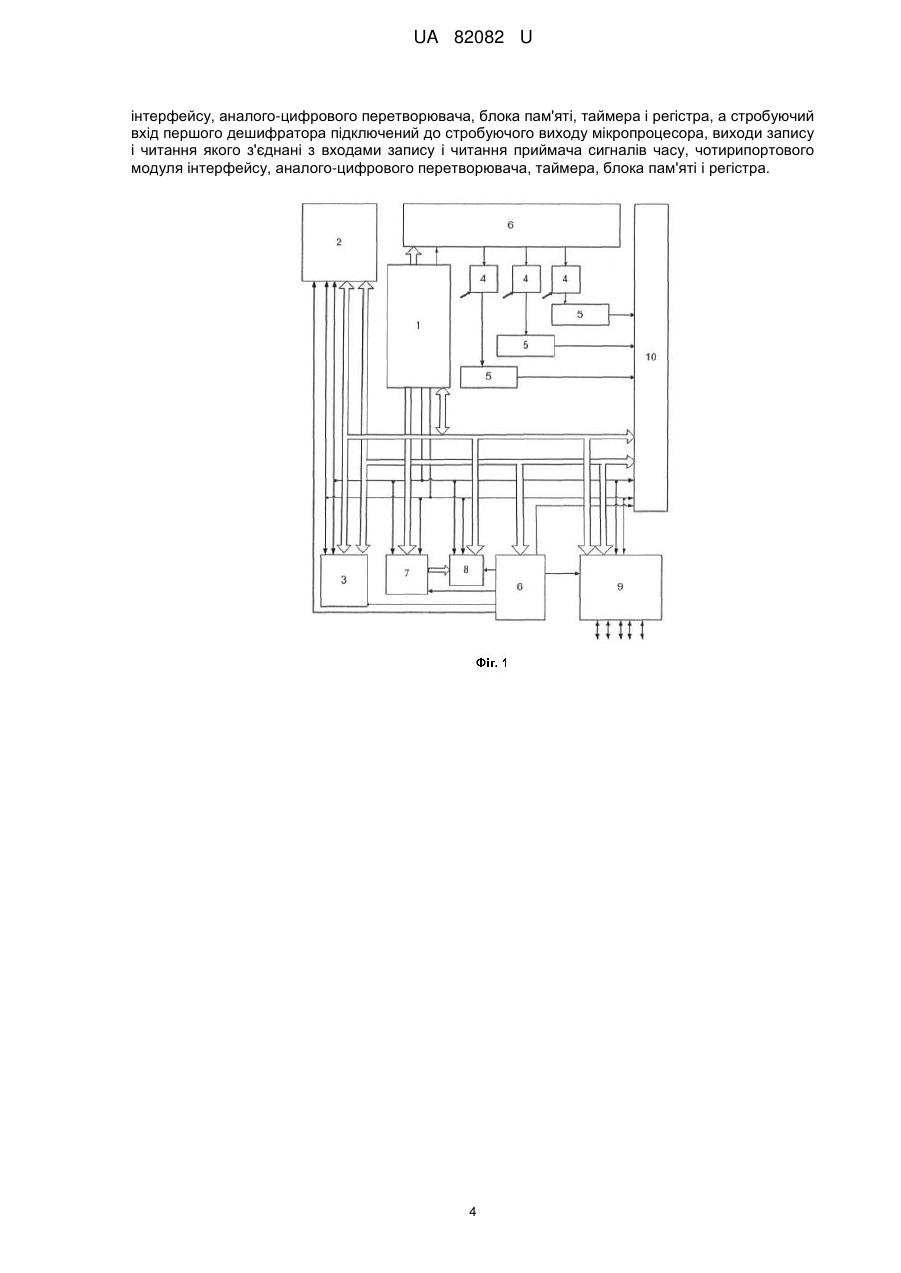
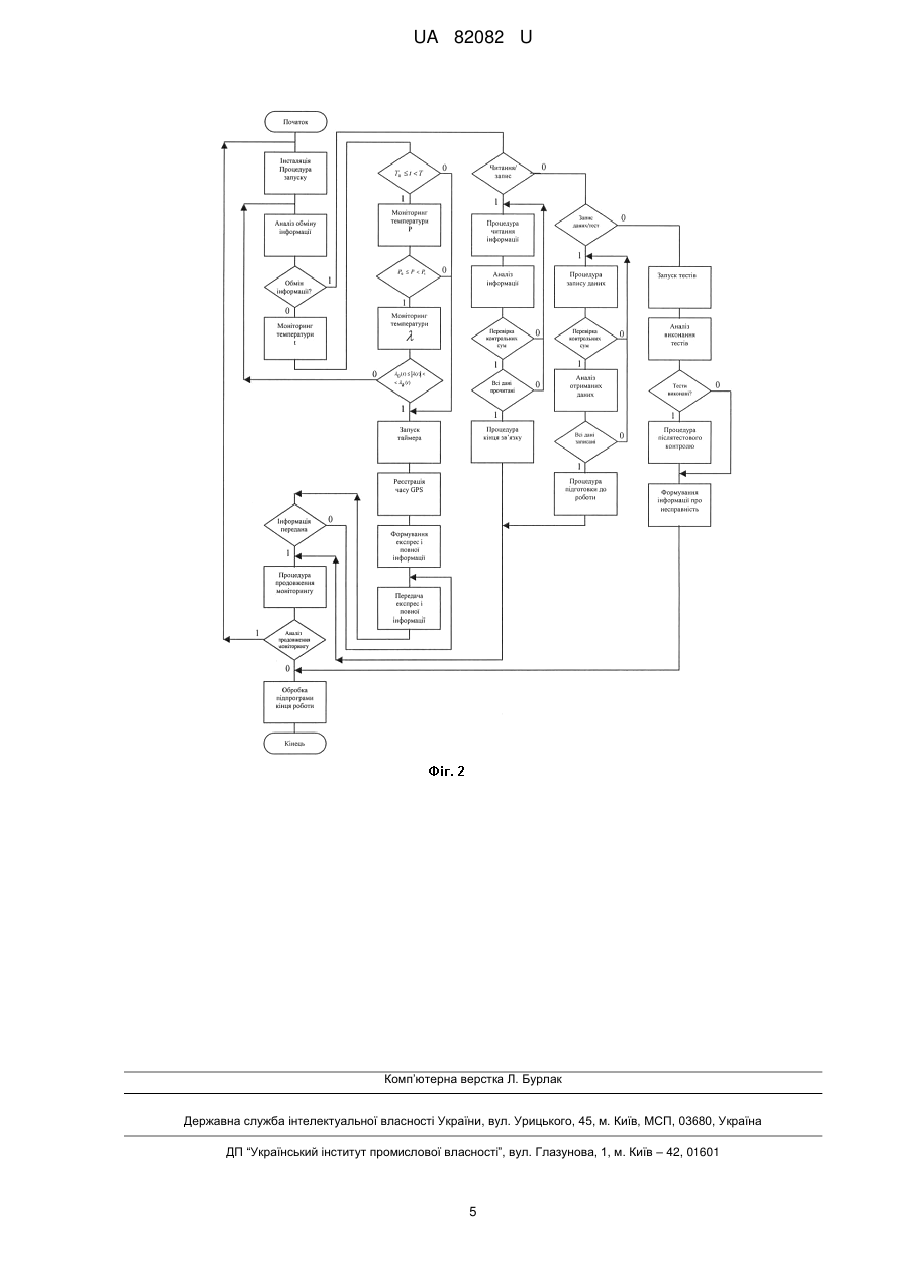
Реферат: Комп'ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів, що містить чотирипортовий модуль інтерфейсу, мікропроцесор, ключі, регістр, дешифратори, приймач сигналів часу, аналого-цифровий перетворювач, формувачі аналогових сигналів. Вихід шини адреси першого порту мікропроцесора підключений до входу адреси першого дешифратора і-й (і=1,2,3,), вихід якого з'єднаний з управляючим входом і-го ключа, підключеного своїм виходом до входу і-го формувача аналогових сигналів. Комп'ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів дає можливість реалізації безперервного моніторингу аналогових сигналів, що відображають нормальні, передаварійні і аварійні режими з прив'язкою до часу і роботи системи захисту з метою проведення аналізу, контролю, діагностики і прогнозу технічного стану. UA 82082 U (12) UA 82082 U UA 82082 U 5 10 15 20 25 30 35 40 45 50 55 60 Корисна модель належить до області обчислювальної техніки, автоматики та вимірювальної техніки і може бути використана для моніторингу параметрів режимів і параметрів режимів рухомих частин вагонів, які забезпечують технологічні процеси перевезень залізниць з метою покращення надійності функціонування вагонів та покращення безпеки руху. Відомий пристрій [1], який виконує функції моніторингу якості складних виробничих процесів, що включає блок оператора, блок регулярного моніторингу показників якості складного технологічного процесу, блок статистичного регулювання технологічними процесами і блок попереднього дослідження стану технологічного процесу, причому вихід блока попереднього дослідження стану технологічного процесу підключено до блока аналізу та керування процесами, блока аналізу і блока керуючих дій, що зв'язані з базою знань. Недоліком відомого пристрою є обмежені функціональні можливості, в зв'язку з тим, що в відомому пристрої не виконуються функції моніторингу параметрів режимів функціонування колісних пар залізниць і на їх базі не проводиться діагностика їх технічного стану. Відома система керування [2] технологічним об'єктом, яка включає регулятор, суматор, блок контролю керуючої величини, модель чистого запізнювання об'єкта керування, блок коректування часу запізнювання, блок порівняння і модель об'єкта без запізнювання, вихід якого підключений до другого входу моделі чистого запізнювання, вхід блока контролю керуючої величини з'єднаний з другим входом об'єкта керування, а вихід регулятора з'єднаний з другим входом суматора, до виходу якого підключені послідовно з'єднані модель чистого запізнювання об'єкта керування, другий блок порівняння і модель об'єкта без запізнювання. Недоліком даного пристрою є обмежені функціональні можливості, в зв'язку з тим, що в відомому пристрої не виконуються функції моніторингу та реєстрації аналогової інформації параметрів функціонування рухомих частин вагонів, таких як температура масла в буксах, провідність масла і ряд інших віброакустичних показників і не проводиться на їх базі контроль і діагностика функціонування в номінальному режимі. Найбільш близькою за своєю технічною суттю є універсальна моніторингова інформаційноаналітична система [3], що включає автоматизовані робочі місця користувачів, редактор моніторингової директиви, сховище даних, редактор директиви на сканування, причому сканер інформаційного ресурсу виконаний з можливістю зв'язування шляхом підключення до нього монітора інформаційного ресурсу, засобів інтелектуального аналізу даних, редактора директиви на сканування та засобів виділення посилань, і шляхом підключення його до засобів оповіщення, до засобів візуалізації, до зовнішніх джерел інформації, до засобів інтелектуального аналізу даних. Недоліком даного пристрою є обмежені функціональні можливості, низька надійність і рівень діагностування в зв'язку з тим, що в відомому пристрої не виконується з єдиних інформаційних позицій моніторинг аналогових сигналів, що відображають режими функціонування параметрів режимів рухомих частин вагонів, не проводиться реєстрація доаварійного, аварійного і післяаварійного режимів функціонування з прив'язкою до часу з метою проведення аналізу, контролю, діагностики і прогнозу технічного стану. За основу корисної моделі поставлена задача створення комп'ютерної системи для проведення моніторингу та діагностики параметрів режимів рухомих частин вагонів, а також збільшення рівня їх надійність і можливості діагностування та прогнозу технічного стану в процесі роботи, в якій за рахунок введення нових блоків і зв'язків між ними відкривається можливість реалізації моніторингу і діагностики параметрів режимі з прив'язкою до часу і роботою системи захисту з метою проведення аналізу, діагностики і прогнозу залишковий ресурс. Поставлена задача вирішується шляхом включення до комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів чотирипортового модуля інтерфейсу, мікропроцесора, таймера, ключів, регістра, дешифраторів, приймача сигналів часу, аналогоцифрового перетворювача, формувачів аналогових сигналів, причому вихід шини адреси першого порту мікропроцесора підключений до входу адреси першого дешифратора і-й (і=1,2,3,), вихід якого з'єднаний з управляючим входом і-го ключа, підключеного своїм виходом до входу і-го формувача аналогових сигналів, вихід шини даних другого порту мікропроцесора підключений до входу шини даних приймача сигналів часу, чотирипортового модуля інтерфейсу, блока пам'яті, таймера і аналого-цифрового перетворювача, підключеного своїми входами до виходів відповідних формувачів аналогових сигналів, вихід шини адреси третього порту мікропроцесора з'єднаний з входом шини адреси аналого-цифрового перетворювача, регістра, другого дешифратора, таймера, приймача сигналів часу, чотирипортового модуля інтерфейс, вихід регістра з'єднаний з блоком пам'яті, виходи другого дешифратора підключені до відповідних входів вибору кристалу приймача сигналів часу, чотирипортового модуля 1 UA 82082 U 5 10 15 20 25 30 35 40 45 50 55 60 інтерфейсу, аналого-цифрового перетворювача, блока пам'яті, таймера і регістра, а стробуючий вхід першого дешифратора підключений до стробуючого виходу мікропроцесора виходи запису і читання якого з'єднані з входами запису і читання приймача сигналів часу, чотирипортового модуля інтерфейсу, аналого-цифрового перетворювача, таймера, блока пам'яті і регістра. На фіг. 1 наведено структурну схему комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів, на фіг. 2 наведено блок-схему алгоритму функціонування комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів. Комп'ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів (фіг. 1) включає мікропроцесор 1, приймач сигналів часу 2, таймер 3, ключі 4, формувачі аналогових сигналів 5, дешифратори 6, регістр 7, блок пам'яті 8, чотирипортовий модуль інтерфейсу 9, аналого-цифровий перетворювач 10. Вихід шини адреси першого порту мікропроцесора 1 підключений до входу адреси першого дешифратора 6 і-й (і=1,2,3), вихід якого з'єднаний з управляючим входом і ключа 4 підключеного своїм виходом до входу і-го формувача аналогових сигналів 5. Вихід шини даних другого порту мікропроцесора 1 підключений до входу шини даних приймача сигналів часу 2, чотирипортового модулю інтерфейсу 9, блока пам'яті 8, таймера 3 і аналого-цифрового перетворювача 10, підключеного своїми входами до виходів відповідних формувачів аналогових сигналів 5. Вихід шини адреси третього порту мікропроцесора 1 з'єднаний з входом шини адреси аналого-цифрового перетворювача 10, регістра 7, другого дешифратора 6, таймера 3, приймача сигналів часу 2, чотирипортового модуля інтерфейсу 9, вихід регістра 7 з'єднаний з блоком пам'яті 8, виходи другого дешифратора 6 підключені до відповідних входів вибору кристалу приймача сигналів часу 2, чотирипортового модуля інтерфейсу 9, аналого-цифрового перетворювача 10, блока пам'яті 8, таймера 3 і регістра 7. Стробуючий вхід першого дешифратора 6 підключений до стробуючого виходу мікропроцесора 1, виходи запису і читання якого з'єднані з входами запису і читання приймача сигналів часу 2, чотирипортового модуля інтерфейсу 9, аналого-цифрового перетворювача 10, таймера 3, блока пам'яті 8 і регістра 7. Мікропроцесор 1 схеми комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів (фіг. 1) виконаний, наприклад, у вигляді однокристального мікропроцесора КМ1816ВЕ51. Чотирипортовий модуль інтерфейсу 9 комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів (фіг. 1) виконаний, наприклад, у вигляді інтегральної схеми ST16C554DCJ. Робота комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів (фіг. 1) проводиться у відповідності з наведеною блок-схемою алгоритму роботи на фіг. 2. Після запуску комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів вона працює постійно згідно з алгоритмом (фіг. 2) в реальному часі. Спочатку проводиться інсталяція комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів, а також обробляється процедура обміну інформацією між системою і верхнім рівнем керування. Якщо обмін інформацією між комп'ютерною системою моніторингу та діагностики параметрів режимів рухомих частин вагонів і системою вищого рівня керування не проводиться, то вона запускається в роботу. Комп'ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів (фіг. 1) проводить безперервно в реальному часі постійний моніторинг аналогових сигналів, які поступають із датчиків температури, вологості і провідності масла букс. Процедура моніторингу реалізується таким чином, що всі аналогові сигнали за час Т записуються в пам'ять комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів. В наступному такті роботи комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів, тобто в T+t, нові значення аналогових даних записуються в пам'ять на місце інформації, яка записана в першого такті. Таким чином реалізується динамічний процес моніторингу параметрів режимів. В процесі моніторингу постійно проводиться формування інформативних параметрів і аналіз появи аварійного режиму. Якщо аварійної ситуації не було, то процес моніторингу повторюється, тобто реалізується процедура слизького моніторингу всіх аналогових сигналів. В момент появи аварійного режиму реєструється сигнал світового часу із приймача сигналів часу 2, в блоці пам'яті 8 фіксується інформація доаварійного режиму за період Т і записується інформація про аномальний режим за проміжок часу Т 1=Т2+Т3. Фактично записується аналогова інформація, що відображає роботу в продовж аварійного режиму Т 2 і післяаварійного режиму Т3. Після цього реалізується формування файлів експрес- і повної інформації про аварію і передача в автоматичному режимі експрес-даних про доаварійний Т, аварійний Т2 і післяаварійний Т3 режими на систему керування вищого рівня. Передача повної інформації реалізується по запиту з верхнього рівня. Після передачі експрес-інформації проводиться процедура на предмет можливості подальшого продовження моніторингу. У 2 UA 82082 U 5 10 15 20 25 30 35 40 45 50 55 60 випадку неможливості проведення моніторингу - реалізується процедура кінця роботи і функціонування комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів припиняється. Якщо прийнято рішення продовжувати моніторинг, то знову проводиться інсталяція комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів та реалізується аналіз процедури обміну інформацією між системою верхнього рівня керування і комп'ютерною системою моніторингу та діагностики параметрів режимів рухомих частин вагонів. При необхідності проводити обмін інформацією, то в першу чергу реалізується аналіз читання інформації з комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів чи тестування її. Якщо необхідно проводити читання даних, то в комп'ютерній системі моніторингу та діагностики параметрів режимів рухомих частин вагонів виконується процедура прийому даних з системи верхнього рівня, їх аналіз на предмет правильності передачі і в подальшому виконується процедура кінця зв'язку. Потім в комп'ютерній системі моніторингу та діагностики параметрів режимів рухомих частин вагонів проводиться аналіз на предмет продовження моніторингу аналогових сигналів параметрів режимів і процес повторюється. В тому випадку, коли необхідно проводити тестування комп'ютерної системи моніторингу та діагностики параметрів режимів рухомих частин вагонів, то з системи вищого рівня передається пакет тестів і проводиться процедура перевірки правильності її роботи. Якщо тест виконався, то в комп'ютерній системі моніторингу та діагностики параметрів режимів рухомих частин вагонів проводиться процедура післятестового контролю і процес роботи її продовжується згідно з алгоритмом (фіг. 2). У випадку невиконання в комп'ютерній системі моніторингу та діагностики параметрів режимів рухомих частин вагонів тестових програм, то автоматично формується і передається інформація про неполадки в ній на вищий рівень керування і обробляється процедура кінця роботи. Завдяки введенню нових елементів та зв'язків між ними запропонована комп'ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів вигідно відрізняється від прототипу. На відміну від прототипу, в якому звужені функціональні можливості, низька надійність і рівень діагностування, в зв'язку з тим, що на базі прототипу неможливо виконувати з єдиних інформаційних позицій моніторинг аналогових сигналів параметрів режимів, що надходять з датчиків рухомих частин вагонів, у запропонованій комп'ютерній системі моніторингу та діагностики параметрів режимів рухомих частин вагонів завдяки введенню нових блоків і зв'язків між ними відкривається можливість реалізації безперервного моніторингу аналогових сигналів, що відображають нормальні, передаварійні і аварійні режими з прив'язкою до часу і роботи системи захисту з метою проведення аналізу, контролю, діагностики і прогнозу технічного стану. Джерела інформації: 1. Система моніторингу якості складних виробничих процесів відмовостійкого керування об'єктами G07F 3/14, патент України № 61504. Промислова вартість. Офіційний бюлетень № 14, книга 1, 2011 р. 2. Система керування технологічним об'єктом G05В 13/00, патент України № 51692. Промислова вартість. Офіційний бюлетень № 14, 2010 р. 3. Універсальна моніторингова інформаційно-аналітична система, G06F 17/30, патент України № 93175. Промислова власність, Офіційний бюлетень № 1, 2011 р. (прототип). ФОРМУЛА КОРИСНОЇ МОДЕЛІ Комп'ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів, що містить блок пам'яті, яка відрізняється тим, що в неї введено чотирипортовий модуль інтерфейсу, мікропроцесор, таймер, ключі, регістр, дешифратори, приймач сигналів часу, аналого-цифровий перетворювач, формувачі аналогових сигналів, причому вихід шини адреси першого порту мікропроцесора підключений до входу адреси першого дешифратора і-й (і=1,2,3,), вихід якого з'єднаний з управляючим входом і-го ключа, підключеного своїм виходом до входу і-го формувача аналогових сигналів, вихід шини даних другого порту мікропроцесора підключений до входу шини даних приймача сигналів часу, чотирипортового модуля інтерфейсу, блока пам'яті, таймера і аналого-цифрового перетворювача, підключеного своїми входами до виходів відповідних формувачів аналогових сигналів, вихід шини адреси третього порту мікропроцесора з'єднаний з входом шини адреси аналого-цифрового перетворювача, регістра, другого дешифратора, таймера, приймача сигналів часу, чотирипортового модуля інтерфейсу, вихід регістра з'єднаний з блоком пам'яті, виходи другого дешифратора підключені до відповідних входів вибору кристалу приймача сигналів часу, чотирипортового модуля 3 UA 82082 U інтерфейсу, аналого-цифрового перетворювача, блока пам'яті, таймера і регістра, а стробуючий вхід першого дешифратора підключений до стробуючого виходу мікропроцесора, виходи запису і читання якого з'єднані з входами запису і читання приймача сигналів часу, чотирипортового модуля інтерфейсу, аналого-цифрового перетворювача, таймера, блока пам'яті і регістра. 4 UA 82082 U Комп’ютерна верстка Л. Бурлак Державна служба інтелектуальної власності України, вул. Урицького, 45, м. Київ, МСП, 03680, Україна ДП “Український інститут промислової власності”, вул. Глазунова, 1, м. Київ – 42, 01601 5
ДивитисяДодаткова інформація
Назва патенту англійськоюComputer system for monitoring and diagnostics of operating parameters of car moving members
Автори англійськоюHabchak Maksym Kostiantynovych, Stasiuk Oleksandr Ionovych, Petskov Roman Oleksandrovych, Voronko Iryna Oleksandrivna, Voznenko Anatolii Dmytrovych, Kozak Volodymyr Serhiiovych, Barska Natalia Dmytrivna
Назва патенту російськоюКомпьютерная система мониторинга и диагностики параметров режимов подвижных частей вагонов
Автори російськоюГабчак Максим Константинович, Стасюк Александр Ионович, Пецков Роман Александрович, Воронко Ирина Александровна, Гончарова Лидия Леонидовна, Козак Владимир Сергеевич, Барская Наталья Дмитриевна
МПК / Мітки
МПК: G06F 17/30
Мітки: вагонів, комп'ютерна, моніторингу, система, рухомих, частин, параметрів, діагностики, режимів
Код посилання
<a href="https://ua.patents.su/7-82082-kompyuterna-sistema-monitoringu-ta-diagnostiki-parametriv-rezhimiv-rukhomikh-chastin-vagoniv.html" target="_blank" rel="follow" title="База патентів України">Комп’ютерна система моніторингу та діагностики параметрів режимів рухомих частин вагонів</a>
Комп’ютерна система моніторингу та діагностики тягових трансформаторів
Номер патенту: 76896
Опубліковано: 25.01.2013
Автори: Гончарова Лідія Леонідівна, Пецков Роман Олександрович, Стасюк Олександр Іонович, Воронко Ірина Олександрівна, Трофімов Юрій Михайлович, Габчак Максим Костянтинович
МПК: G06F 11/00
Мітки: моніторингу, комп'ютерна, система, діагностики, тягових, трансформаторів
Формула / Реферат:
Комп'ютерна система моніторингу та діагностики тягових трансформаторів, що містить блок пам′яті, яка відрізняється тим, що в неї введено чотирипортовий модуль інтерфейсу, мікропроцесор, ключі, регістр, дешифратори, приймач сигналів часу, аналого-цифровий перетворювач, формувач аналогових сигналів, причому вихід шини адреси першого порту мікропроцесора підключений до входу адреси першого дешифратора і-й (і = 1, 2, 3, 4) вихід якого...
Комп’ютерна система моніторингу діелектричних параметрів і стану ізоляції високовольтних силових трансформаторів

Номер патенту: 44654
Опубліковано: 12.10.2009
Автори: Стасюк Олександр Іонович, Панов Анатолій Володимирович, Пилипенко Юрій Володимирович, Стогній Борис Сергійович, Буткевич Олександр Федотович, Тутик Володимир Львович, Гончарова Лідія Леонідівна, Сопель Михайло Федорович, Щербакова Ілона Олександрівна
МПК: G06F 11/18
Мітки: трансформаторів, ізоляції, моніторингу, діелектричних, система, комп'ютерна, силових, параметрів, високовольтних, стану
Формула / Реферат:
Комп'ютерна система моніторингу діелектричних параметрів і стану ізоляції високовольтних силових трансформаторів, що містить два інформаційних виходи, яка відрізняється тим, що в неї введено мікропроцесор, три дешифратори, запам'ятовуючий пристрій, чотирипортовий модуль, два регістри, ключі, формувачі аналогових сигналів, аналого-цифровий перетворювач, причому ключі виконані в вигляді матриці (2х3), перші управляючі входи кожного і-го (і = 1,...
Комп’ютерна система безперервної діагностики ходових частин швидкісного рухомого складу залізниць
Номер патенту: 67530
Опубліковано: 15.06.2004
Автори: Ковзель Микола Олегович, Стасюк Ілона Олександрівна, Остапюк Борис Ярославович, Шпеко Микола Іванович, Сергієнко Микола Іванович, Зубко Арлікін Петрович, Семенова Наталія Володимирівна, Кельріх Михайло Борисович
МПК: G06F 17/20, G06F 17/40
Мітки: рухомого, швидкісного, безперервної, частин, діагностики, залізниць, ходових, складу, система, комп'ютерна
Формула / Реферат:
1. Комп'ютерна система безперервної діагностики ходових частин швидкісного рухомого складу залізниць, що включає блок гальванічної розв'язки, регістри, дешифратор, яка відрізняється тим, що її доповнено модемами, персональним комп'ютером та мікропроцесорними системами первинної обробки діагностичної інформації, кожний із яких включає мікропроцесор, два дешифратори, оперативний запам'ятовуючий пристрій, чотирипортовий модуль, мікропроцесорний...
Комп’ютерна система комерційного обліку електроенергії, реєстрації аварійних режимів та проведення безперервної діагностики електричного обладнання тягових підстанцій
Номер патенту: 61758
Опубліковано: 17.11.2003
Автори: Ковзель Микола Олегович, Стогній Борис Сергійович, Семенова Наталія Володимирівна, Стасюк Ілона Олександрівна, Тутик Володимир Львович, Гінайло Андрій Вікторович, Мартинюк Максим Володимирович, Сопель Михайло Федорович
МПК: G06F 17/40, G06F 17/20
Мітки: система, електроенергії, тягових, обладнання, безперервної, комерційного, реєстрації, режимів, проведення, електричного, обліку, підстанцій, діагностики, аварійних, комп'ютерна
Формула / Реферат:
1. Комп'ютерна система комерційного обліку електроенергії, реєстрації аварійних режимів та проведення безперервної діагностики електричного обладнання тягових підстанцій, що включає дешифратор, регістр, блок гальванічної розв'язки, яка відрізняється тим, що її доповнено центральним персональним комп'ютером, мікропроцесорними модулями та модемами, причому кожний мікропроцесорний модуль включає мікропроцесор, дешифратор, блок гальванічної...
Комп`ютерна система реєстрації аварійних режимів на тягових електричних підстанціях залізниць
Номер патенту: 32395
Опубліковано: 15.12.2000
Автори: Зубко Арлікін Петрович, Стасюк Олександр Іонович, Сопель Михайло Федорович, Стогній Борис Сергійович, Мішечкін Віктор Георгійович, Анохов Ігор Васильович
МПК: G06Q 99/00, G06F 17/40
Мітки: підстанціях, залізниць, аварійних, система, тягових, реєстрації, електричних, режимів, комп'ютерна
Текст:
...реєстрації доаварійного, аварійного та післяаварійного режимів з можливістю реєстрац ії роботи системи захисту енергетичної мережі, а також знаходження місця аварії і збільшення надійності функціонування, живучості та ступеню одонородності архітектури інформаційно-вимірювальної системи [3]. Поставлена мета досягається шляхом включення до комп'ютерної -зсистеми реєстрації аварійних режимів на тягових електричних підстанціях залізниць...
Попередній патент: Контейнер-цистерна
Наступний патент: Спосіб визначення витрат води у відкритих каналах
Випадковий патент: Спосіб захисту інформації в мікроконтролері реєстратора розрахункових операцій