Вітросилова установка
Номер патенту: 84319
Опубліковано: 10.10.2008
Автори: Каян Володимир Павлович, Кочін Віктор Олександрович, Гребеніков Віктор Володимирович, Довгий Станіслав Олексійович

Формула / Реферат
1. Вітросилова установка, що містить ротор з вертикально розташованим валом, з яким за допомогою траверс і цапф зв'язані вертикальні лопаті, які оснащені вертикальними осями з шарнірними кільцями, за допомогою яких вони закріплені на траверсах з можливістю повороту навколо цих осей, і встановленими на нижніх кінцях лопатей додатковими осями з вилками та роликами, які стикуються з кільцеподібною напрямною у формі жорсткого обода, що має у плані форму окружності і з'єднана з механізмом керування положення лопатей ротора таким чином, що має можливість лінійного переміщення уздовж лінії дії вітрового потоку, електрогенератор з електромагнітною муфтою на кінці його вала, а також апаратуру керування вітросиловою установкою з програмним пристроєм, яка відрізняється тим, що механізм керування положення лопатей ротора містить встановлені на поворотній платформі горизонтально-лінійні електромагнітні двигуни, якорі яких з'єднані з вертикальними стійками, жорстко закріпленими на основі кільцеподібної напрямної, подовжні осі якорів знаходяться на одній лінії та під прямим кутом до осі обертання вітроротора, при цьому на поворотній платформі встановлені електромагнітно-пружинні фіксатори положення якорів, а механізм повороту платформи містить встановлений на нерухомій основі електродвигун з циліндричною шестірнею на кінці ротора, яка знаходиться у зчепленні з круговим зубчастим кільцем, розміщеним на нижньому зовнішньому краю поворотної платформи, апаратура керування вітросиловою установкою містить встановлені на вітроустановці і зв'язані з програмним пристроєм датчики контролю напрямку та швидкості вітру, швидкості обертання вітроротора, величини лінійного переміщення центра кільцеподібної напрямної відносно центральної осі обертання вітроротора, кутового переміщення поворотної платформи.
2. Вітросилова установка за п. 1, яка відрізняється тим, що програмний пристрій апаратури керування вітросиловою установкою містить додатковий контролер, який визначає величини напруги і сили струму, який подається на обмотки лінійних електромагнітних двигунів.
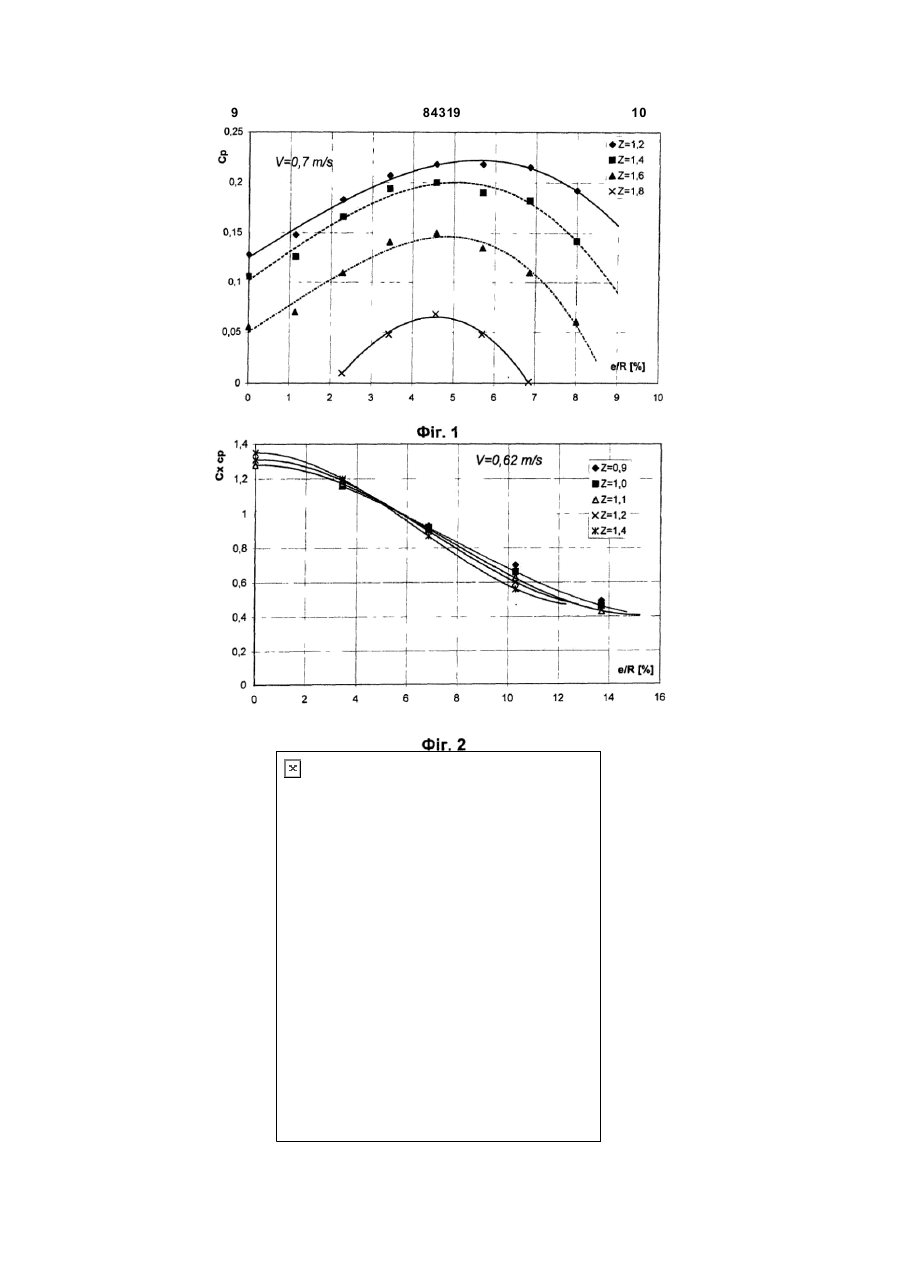
3. Вітросилова установка за п. 1, яка відрізняється тим, що відстань між осями на торці лопаті вітроротора визначається рівною 0,2R, де R є радіусом окружностей, по яких переміщуються осі лопатей, а величина лінійного переміщення центра кільцеподібної напрямної відносно центральної осі обертання вітроротора в сторону дії вітрового потоку може змінюватись від 0,05R при максимальній ефективності вітроротора до 0,15R при мінімальній величині вітрового навантаження на вал вітроротора.
Текст
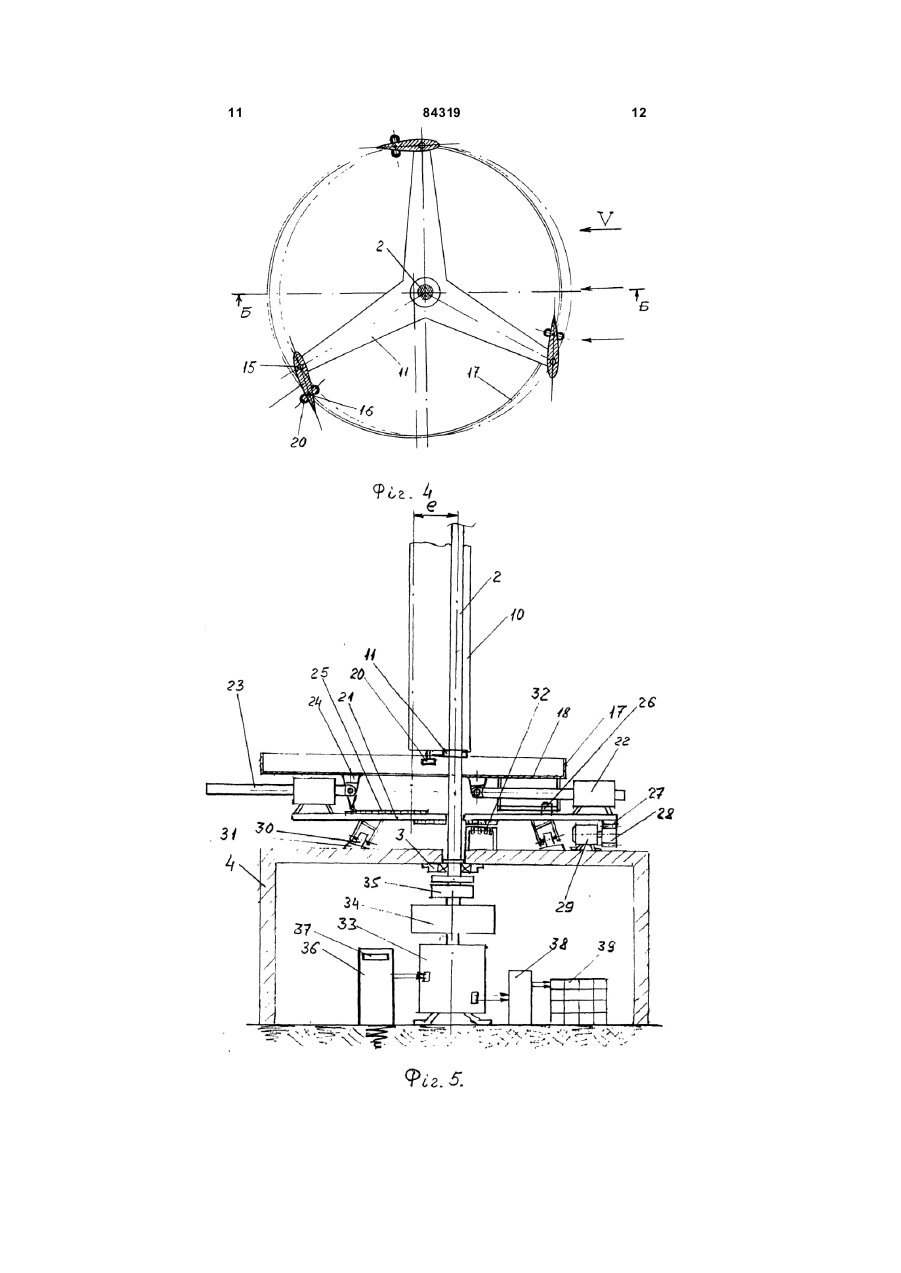
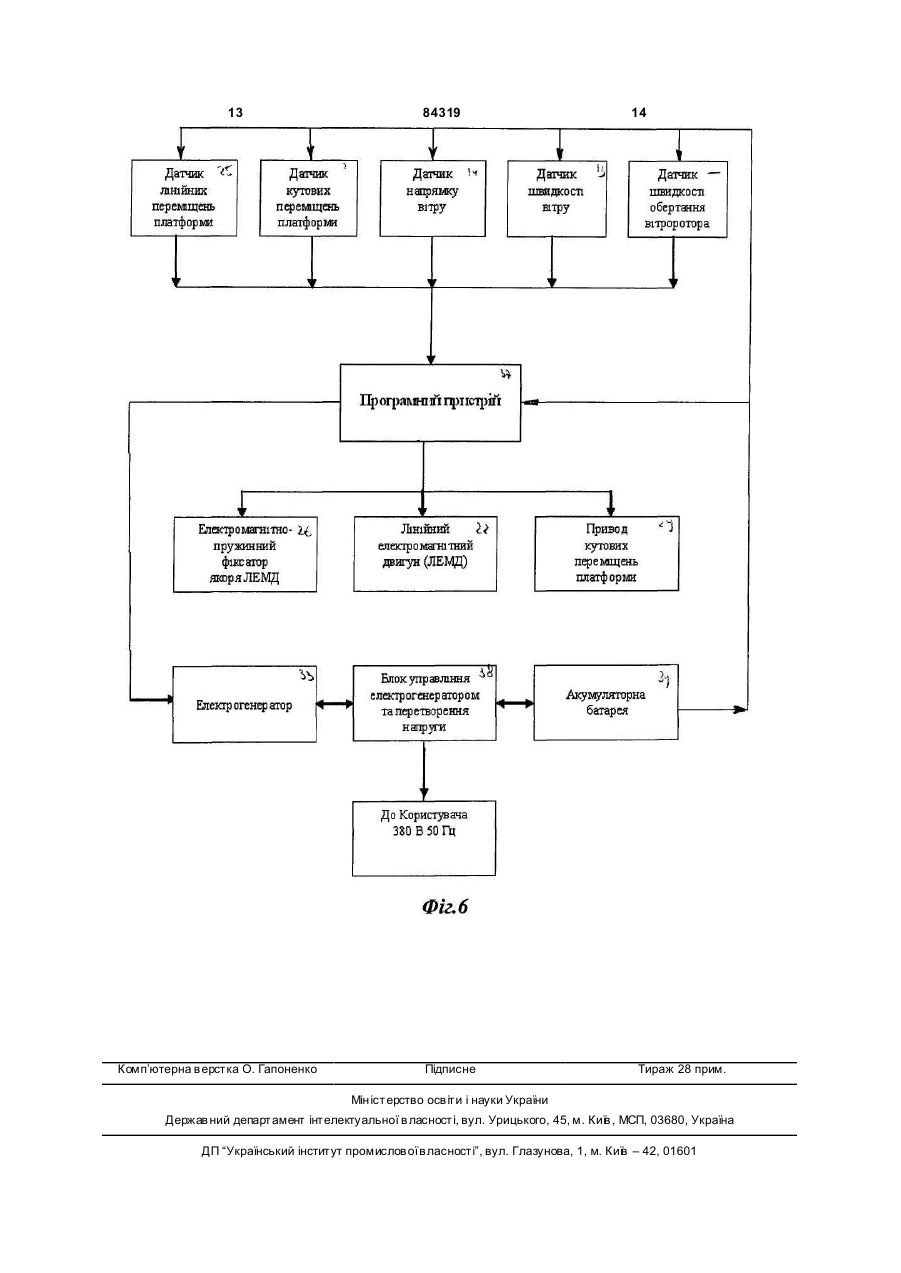
1. Вітросилова установка, що містить ротор з вертикально розташованим валом, з яким за допомогою траверс і цапф зв'язані вертикальні лопаті, які оснащені вертикальними осями з шарнірними кільцями, за допомогою яких вони закріплені на траверсах з можливістю повороту навколо цих осей, і встановленими на нижніх кінцях лопатей додатковими осями з вилками та роликами, які стикуються з кільцеподібною напрямною у формі жорсткого обода, що має у плані форму окружності і з'єднана з механізмом керування положення лопатей ротора таким чином, що має можливість лінійного переміщення уздовж лінії дії вітрового потоку, електрогенератор з електромагнітною муфтою на кінці його вала, а також апаратуру керування вітросиловою установкою з програмним пристроєм, яка відрізняється тим, що механізм керування положення лопатей ротора містить встановлені на поворотній платформі горизонтально-лінійні електромагнітні двигуни, якорі яких з'єднані з вертикальними стійками, жорстко закрі C2 2 (11) 1 3 84319 4 осі, і встановленими на нижніх кінцях лопатей вилрового потоку, а механізм розміщено на поворотками з роликами, містить флюгер із приєднаною ній платформі, яка жорстко з'єднана з флюгером. до нього кільцеподібною направляючою, причому Додаткові відмінності полягають у тому що меїх з'єднання виконане пружним з можливістю зміни ханізм лінійного переміщення кільцеподібної накутового зсуву їх відносно один одного, а направправляючої містить приводний електродвигун, ляюча додатково споряджена приймачем швидкісредуктори та подовжні направляючі, розміщені на ного напору. Додаткові відрізнення полягають у платформі механізму, та черв'яки, зв'язані з редуктому, що пружне з'єднання флюгера з кільцеподіторами та гайками, які жорстко з'єднані з основою бною направляючою містить установлений на кільцеподібної направляючої, яка має також ролифлюгері підпружинений ролик і контактуючу з ним ки для переміщення уздовж подовжніх направляопорну кругову циліндричну поверхню, установлеючих, а апаратура керування вітросиловою устану на кільцеподібній направляючій з ексцентрисиновкою містить програмний пристрій для тетом щодо осі повороту флюгера, причому вертивизначення оптимальної величини лінійного змікальні поверхні кільцеподібної направляючої щення центра кільцеподібної направляючої віднореброподібної форми мають у плані форму окружсно центральної осі обертання ротору в залежносностей, центр яких зміщений щодо осі повороту ті від параметрів роботи ротора вітросилової флюгера у бік його робочого елементу, а приймач установки. швидкісного напору виконаний зонтикоподібним, Недоліками такої вітросилової установки є те, причому пелюстки зонтикоподібної поверхні з'єдщо жорстке з'єднання поворотної платформи менані з розташованим горизонтально осьовим штоханізму керування лопатями вітроротору з флюгеком зонтика пружно, а останній установлений на ром призводить до збільшення масогабаритів кільцеподібній направляючій шарнірно з кутовим елементів установки, оскільки для реакції флюгера зсувом у 135° відносно подовжньої осі важеля на поворот вітрового потоку при малих швидкостях флюгера в напрямку обертання ротора. вітру потрібна досить велика площа робочої повеКонструкція такого вітроротора дозволяє при рхні флюгера, не встановлено алгоритм управліндуже великих швидкостях вітрового потоку для ня роботою механізма керування лопатями в запідвищення безпеки роботи вітроустановки змінилежності від оптимізації параметрів роботи ти напрямок лінії, що з'єдн ує центри двох окружвітросилової установки. ностей, по яким переміщуються нижні вісі лопатей Як показали проведені авторами дослідження, вітроротора, в сторону, протилежну напрямку обемаксимальна величина одного з важливих парартання вітроротора, на кут до 45°. Згідно опису метрів ефективності роботи вітроротора, а саме винаходу це призведе до значного зменшення коефіцієнта використання енергії вітрового потока швидкості обертання вітроротора. Ср, досягається при eopt=e/R=5-6% (Фіг.1) (де «e» Недоліками такого ротора вітросилової устаце величина лінійного зміщення центра кільцепоновки є те, що, як показали експериментальні додібної направляючої відносно центра обертання слідження, проведені авторами з моделлю вітровітроротора, R - величина радіуса обертання лоротора, у якої величина відстані між центрами патей навколо центрального вала вітроротора). окружностей (тобто ексцентриситету) складала 8% Зазначимо, що експериментальні дослідження від величини радіуса обертання лопатей навколо проводились авторами з моделлю вітроротора, у центрального вала вітроротора, кутове відхилення якої величина «k» відношення величини відстані «j» зазначеної лінії ексцентриситету від напрямку «b» між нижніми керуючими осями лопаті до веливітрового потоку на 40-50 градусів в ту чи іншу чини радіуса R складала k=b/R=20%. Якщо у реасторону призводить до збільшення величини сельного вітроротора величина «k» буде більша за реднього коефіцієнту гідроаеродинамічного опору вказану, то і величина eopt також буде більшою, і вітроротора Схсер (тобто до збільшення величини навпаки. Результати вимірів величин гідроаеродивітрового навантаження на вал вітроротора) на 40намічного опору вітроротора під час цих же дослі60%, що загрожує при буремних швидкостях ві тру джень дали іншу картину (Фіг.2). При оптимальній руйнуванням вітроустановки. для досягнення максимума величини коефіцієнта Більш близькою по своїй конструкції до пропоСр величині e=0,05R зниження величини середньонованого винаходу є "Вітросилова установка" [2], го коефіцієнта гідроаеродинамічного опору Cxсер що містить ротор з вертикально розташованим склало всього близько 30%, а от при подальшому валом, з яким за допомогою траверс і цапф зв'япереміщенні центру кільцеподібної направляючої у зані вертикальні лопаті, які споряджені вертикальнапрямку за потоком було отримано трикратне ними вісями з шарнірними кільцями, за допомогою зменшення величини середнього коефіцієнта гідяких вони закріплені на траверсах з можливістю роаеродинамічного опору Cxсер (від Cxс ер=1,3 до повороту навколо цих осей, і встановленими на Cxсер=0,45), одночасно при цьому знижується нижніх кінцях лопатей додатковими осями з вилшвидкість обертання вітроротора, тобто зменшуками та роликами, які стикуються з кільцеподібною ється величина коефіцієнта швидкохідності направляючою у формі жорсткого ободу, що має у Z=2pnR/V, вдвічі зменшується величина коефіцієплані форму окружності, а також апаратуру керунту пульсації сили горизонтального навантаження вання вітросиловою установкою. Установка місна вал вітроротора. Таким чином, при великих тить також механізм керування положенням лопашвидкостях вітру, що значно перебільшують розтей вітроротора, з яким кільцеподібна раховану робочу швидкість вітра, при якій вітроуснаправляюча з'єднана таким чином, що має можтановка працює в найбільш сприятливому режимі, ливість лінійного переміщення уздовж лінії дії вітзміщення центру кільцеподібної направляючої відносно центру обертання вітроротора на 15-16% 5 84319 6 від величини радіусу обертання лопатей вітророторці лопаті вітроротора визначається рівною тора приведе до різкого зниження як швидкості 0,2R, де R є радіусом окружностей, по яких переобертання вітроротра так і величини і пульсації міщуються осі лопатей, а величина лінійного песили горизонтального навантаження на вал вітрореміщення центра кільцеподібної направляючої ротора. відносно центральної осі обертання вітроротора в Задача, розв'язувана пропонованим винахосторону дії вітрового потоку може змінюватись від дом - підвищення ефективності роботи вітросило0,05R при при максимальній ефективності вітрорової установки за рахунок поліпшення експлуататора до 0,15R при мінімальній величині вітрового ційних характеристик і підвищення безпеки роботи навантаження на вал вітроротора. вітросилової установки при дуже великих і буремПропонована конструкція вітросилової устаноних швидкостях вітру шля хом зміни кутів встановвки дозволяє в залежності від швидкості вітру, лення лопатей вітроротора за рахунок лінійного співвідношення величин основних елементів вітзсуву кільцеподібної замкнутої направляючої в роротора та необхідних параметрів його роботи напрямку дії вітрового потоку на деяку визначену (швидкість обертання, величина крутного моменту, відстань. величина аеродинамічного навантаження на вал Поставлена задача вирішується тим, що ві твітроротора) автоматично встановлювати таку росилова установка містить ротор з вертикально величину ексцентриситету «e», щоб оптимізувати розташованим валом, з яким за допомогою трабудь - який з цих параметрів. верс і цапф зв'язані вертикальні лопаті, які споряСутність винаходу пояснюється кресленнями. джені вертикальними осями з шарнірними кільцяНа Фіг.1 представлені отримані експериментально ми, за допомогою яких вони закріплені на залежності величини коефіцієнту використання траверсах з можливістю повороту навколо цих енергії потоку С р від величини ексцентриситету осей, і встановленими на нижніх кінцях лопатей «e» при кількох сталих значеннях величини коефідодатковими осями з вилками та роликами, які цієнту швидкохідності Z; на Фіг.2 - залежності вестикуються з кільцеподібною направляючою у фоличини середнього коефіцієнту гідроаеродинамічрмі жорсткого ободу, що має у плані форму окружного опору Cxс ер вітроротора від величини ності і з'єднана з механізмом керування положенексцентриситету «e» при кількох сталих значеннях ням лопатей ротора таким чином, що має величини коефіцієнту швидкохідності Z, на Фіг.3 можливість лінійного переміщення уздовж лінії дії вид збоку вітросилової установки ; на Фіг.4 - розріз вітрового потоку, на основі кільцеподібної направAA на Фіг.3 ; на Фіг.5 - розріз ББ на Фіг.4; на Фіг.6 ляючої встановлені ролики для переміщення узблок-схема апаратури керування роботою вітродовж подовжніх направляючих, які розміщені на силової установки. поворотній платформі механізма керування полоВітросилова установка (Фіг.3) містить вітророженням лопатей ротора, має також електрогенетор 1 з вертикальним валом 2, нижня опора 3 якоратор з електромагнітною муфтою на кінці його го встановлена на агрегатному приміщенні 4, яке є вала та апаратуру керування вітросиловою устаосновою вітроустановки, а верхня опора 5 на хреновкою з програмним пристроєм, а механізм керустоподібній опорі 6, яка чотирма стовпами 7 опивання положенням лопатей вітроротора містить рається на агрегатне приміщення 4 і фіксується встановлені на поворотній платформі горизонтарозтяжками 8, та механізм 9 керування лопатями льно лінійні електромагнітні двигуни, якорі яких 10, розміщений під ротором 1. Вітроротор 1 склаз'єднані з вертикальними стійками, жорстко закрідається з лопатей 10 і траверс 11, які закріплені на пленими на основі кільцеподібної направляючої, вертикальному валу 2. Над верхньою хрестоподіподовжні осі якорів знаходяться на одній лінії та бною опорою 6 розміщено невеликий флюгер 12 з під прямим кутом до осі обертання вітроротора, датчиками швидкості вітрового потоку 13 і його при цьому на поворотній платформі встановлені напрямку дії 14. електромагнітно-пружинні фіксатори положення На лопатях 10 на нижньому та верхньому торякорів, а механізм повороту платформи містить цях кожної з них на хорді симетричного профілю встановлений на непорушній основі електродвигун лопаті на деякій відстані від носка профілю розміз циліндричною шестернею на кінці ротора, яка щені з можливістю вільного обертання в траверсах знаходиться у зціпленні з круговим зубчатим кіль11 осі 15, а на нижньому торці, на деякій відстані цем, розміщеним на нижньому зовнішньому краю від такої ж осі 15 убік хвостової частини профілю поворотної платформи, а апаратура керування розміщена додаткова вісь 16, яка рухається по вітросиловою установкою містить встановлені на додатковій кільцеподібній направляючій 17, що вітроустановці і зв'язані з програмним пристроєм виконана у вигляді жорсткого обода з пласкою датчики контролю напрямку та швидкості вітру, горизонтальною основою 18 і належить до механішвидкості обертання вітроротора, величини лінійзма 9 керування положенням лопатей 10 (Фіг.4). ного переміщення центра кільцеподібної направДля забезпечення вільного проходження осі 16 ляючої відносно центральної осі обертання вітроуздовж бокових поверхонь обода 17 ця вісь споряротора, кутового переміщення поворотної джена вилкою 19 з роликами 20. платформи. Приводом для лінійного переміщення додатДодаткові відмінності полягають у тому, що кової кільцеподібної направляючої 17 відносно програмний пристрій апаратури керування вітроповоротної платформи 21 на деяку визначену весиловою установкою містить додатковий контроличину ексцентрисітета «e» є два лінійні електролер, який визначає величини напруги і сили струмагнітні двигуни 22, які розташовані таким чином, му, який подається на обмотки лінійних що подовжні осі якорів 23 цих дви гунів знаходятьелектромагнітних двигунів, відстань між осями на ся на одній лінії, яка пересікає вісь обертання віт 7 84319 8 роротора під прямим кутом (Фіг.5). Якорі 23 електний пристрій 37 встановлює таку величину ексценромагнітних двигунів 22 з'єднані шарнірно зі стійтриситету «e», який дозволить вітроротору 1 легко ками 24, що жорстко закріплені на, горизонтальній самозапуститися. При роботі вітроротора постійно основі 18. На основі 18 кільцеподібної направляюконтролюються швидкість вітру і швидкість оберчої 17 встановлені також ролики для переміщення тання вітроротора 1, а величина ексцентриситету її уздовж подовжніх направляючих, які розміщені «e» встановлюється таким чином, щоб отримати на поворотній платформі 21 механізма 9 керуваннайбільше значення коефіцієнта використання ня положенням лопатей 10 вітроротора 1 (на Фіг.5 енергії вітрового потоку Cp (Фіг.1). Після досягненне показані). Відсліжування точної величини лінійня механізмом 9 визначеної величини ексцентриного переміщення якорів 23 (тобто кільцеподібної ситету «e» одночасно вимикається ток на електнаправляючої 17) здійснюється датчиком лінійного ромагнітних двигунах 22 і електромагнітнопереміщення 25. Фіксація потрібного положення пружинному фіксаторові 26, в результаті чого прукільцеподібної направляючої 17 здійснюється ележиною фіксаторів 26 фіксується положення якорів ктромагнітно-пружинним фіксатором 26. 23, тобто задане положення механізму 9 керуванПлатформа 21 розміщена на даху агрегатного ня положенням лопатей 10. Після досягнення поприміщення 4 з можливістю повороту її навколо трібної швидкості обертання вітроротора 1 вклювертикальної осі, співвісної із подовжньою віссю чається електромагнітна муфта 35 і приводиться в вертикального вала 2. Поворот платформи 21 (а рух ротор електрогенератора 33. Після цього елетим самим і всього механізму 9) здійснюється за ктричний струм через блок управління електрогедопомогою розміщеного по нижньому краю круглої нератором та перетворення напруги 38 подається форми в плані платформи зубчатого кільця 27, з до користувача або до акумуляторної батареї 39. яким у зціпленні знаходиться циліндрична зубчата При зміні величини швидкості вітру від визначеної шестерня 28, з'єднана з валом приводного електна 30% в ту чи іншу сторону зміною величини ексродвигуна 29, вісь обертання ротора якого є горицентриситету «e» можливо підтримувати постійзонтальною. Під час колового руху платформи 21 ною швидкість обертання вітроротора, що особливідносно вертикальної осі вона опирається на рово важливо для електрогенеруючих машин. При лики 30, що рухаються по конічної форми ложемедосить значній зміні швидкості вітру потрібно буде нту 31. Відсліжування точної величини кутового дискретно змінювати величину передаточного чипереміщення платформи 21 здійснюється датчисла редуктора 34. При буремних швидкостях ві тру ком кутового переміщення 32. (більше 20-25м/сек.) потрібно з точки.зору безпеки В агрегатному приміщенні 4 розміщується роботи вітросилової установки встановити механіелектрогенератор 33, вал якого через редуктор 34 змом величину ексцентриситету «e» втричі більшу (який може бути виконаний з дискретною зміною ніж при визначеній для реальної конструкції вітровеличини його передаточного числа) та з'єднувасилової установки з точки зору максімума коефіцільно-роз'єднувальну електромагнітну муфту 35 єнта С р (Фіг.2) - тобто e=0,15R замість 0,05R. з'єднується з валом 2 вітроротора. Там же знахоТаким чином, запропонована конструкція вітдиться апаратура керування 36 вітросиловою росилової установки з вертикальною віссю оберустановкою з програмним пристроєм 37. тання вітроротора, механізму керування положенВітросилова установка працює в такий спосіб. ням лопатей під час їх колового руху у При виникненні вітрового потоку флюгер 12 під горизонтальній площині, алгоритму для програмвпливом аеродинамічних сил, що виникають на ного пристрою керування положенням лопатей його робочому елементі, вільно повертається віддозволяють простими методами підтримувати при носно осі вертикального вала 2 до положення, при зміні сили та напрямку вітру максимуми таких роякому його опір потоку, що набігає, буде мінімальбочих характеристик вітроротора як коефіцієнти ним. При цьому датчик напрямку дії вітрового повикористання енергії потоку С р та крутного моментоку 14 передає дані про величину куту повороту та на валу См , або мінімуму величини вітрового до апаратури 36 керування вітросиловою установнавантаження на вал вітроротора, або постійність кою (Фіг.6), програмний пристрій 37 якої видає ковеличини швидкості обертання вітроротора, що манду на включення електродвигуна 29, який поособливо важливо у тому разі якщо споживачем вертає платформу 21 до тих пір, поки кінетичної енергії обертання вала вітроротора є горизонтальна подовжня вісь електромагнітних електрогенератор. Усі зазначені вище постулати двигунів 22 не співпаде з напрямком дії вітрового підтверджені експериментальними дослідженнями потоку і датчик кутового переміщення 32 не дасть авторів. команду на зупинку електродвигуна 29. Джерела інформації В залежності відвеличини швидкості вітру (яку 1. Патент України 58189, МКИ F03D7/06 (2003). до апаратури 36 керування вітросиловою установ2. Патент №16097. кою передає датчик швидкості вітру 13) програм 9 84319 10 11 84319 12 13 Комп’ютерна в ерстка О. Гапоненко 84319 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюWind-power unit
Автори англійськоюHrebenikov Viktor Volodymyrovych, Dovhyi Stanislav Oleksiiovych, Kaian Volodymyr Pavlovych, Kochin Viktor Oleksandrovych
Назва патенту російськоюВетросиловая установка
Автори російськоюГребеников Виктор Владимирович, Довгий Станислав Алексеевич, Каян Владимир Павлович, Кочин Виктор Александрович
МПК / Мітки
МПК: F03D 7/06
Мітки: установка, вітросилова
Код посилання
<a href="https://ua.patents.su/7-84319-vitrosilova-ustanovka.html" target="_blank" rel="follow" title="База патентів України">Вітросилова установка</a>
Вітросилова установка
Номер патенту: 16097
Опубліковано: 17.07.2006
Автори: Бойко Павло Миколайович, Каян Володимир Павлович, Лебідь Олексій Григорович, Довгий Станіслав Олексійович
Мітки: вітросилова, установка
Формула / Реферат:
1. Вітросилова установка, що містить ротор з вертикально розташованим валом, з яким за допомогою траверс і цапф зв’язані вертикальні лопаті, які мають вертикальні осі з шарнірними кільцями, за допомогою яких вони закріплені на траверсах з можливістю повороту навколо цих осей, і встановленими на нижніх кінцях лопатей додатковими осями з вилками та роликами, які стикуються з кільцеподібною напрямною у формі жорсткого обода, що має у плані форму...
Вітросилова установка з вертикальним ротором
Номер патенту: 5685
Опубліковано: 15.03.2005
Автори: Бойко Павло Миколайович, Бойко Іван Миколайович
МПК: F03D 7/06
Мітки: установка, вітросилова, вертикальним, ротором
Формула / Реферат:
1. Вітросилова установка з вертикальним ротором, що містить вертикально розташовані лопаті, кожна з яких зв'язана за допомогою траверс і з'єднана з вертикальною втулкою, яка шарнірно закріплена на нерухомому валу, один кінець якого розміщений на платформі, а другий за допомогою розтяжок через А-подібні стійки зв'язаний з нерухомою основою, при цьому лопаті споряджені шарнірними кільцями, за допомогою яких вони закріплені на траверсах з...
Вітросилова установка
Номер патенту: 70791
Опубліковано: 15.10.2004
Автори: Малишев Ілля Володимирович, Брюханов Олександр Михайлович, Кузьменко Микола Семенович, Неброй Володимир Михайлович
МПК: F03D 3/02
Мітки: установка, вітросилова
Формула / Реферат:
Вітросилова установка, що містить вежу, яка складається з нижньої конфузорної, середньої циліндричної і верхньої дифузорної частин, і вітроколесо, яке розташоване горизонтально в циліндричній частині, яка відрізняється тим, що кожна секція середньої частини обладнана додатковими, виконаними з можливістю обертання в горизонтальній площині, конфузорами, суміщеними з дифузорами, при цьому вхідні вікна конфузора розташовані з навітряної сторони,...
Вітросилова установка великої потужності, у якій використовується пірамідальний вітровий двигун
Номер патенту: 71173
Опубліковано: 15.11.2004
Автор: Степанчук Аркадій Миколайович
МПК: F03D 5/00
Мітки: вітровій, якій, великої, установка, пірамідальний, вітросилова, потужності, двигун, використовується
Формула / Реферат:
Вітросилова установка, у якій використовується пірамідальний вітровий двигун, що містить вертикальну вісь і рівномірно закріплені два яруси лопатей навколо неї, яка відрізняється тим, що три краї лопатей нижнього ярусу через систему амортизації і стабілізації спираються на три кінці просторових ферм, які містяться на шасі, що забезпечують рух по замкнутому колу і розвантаження опорно-підшипникового блока, а вісь з наскрізними шпильками...
Вітросилова електростанція
Номер патенту: 15761
Опубліковано: 17.07.2006
Автори: Землянський Сергій Олексійович, Золотько Яків Артемович, Золотько Сергій Дмитрович
МПК: F03D 5/04
Мітки: вітросилова, електростанція
Формула / Реферат:
1. Вітросилова електростанція, що містить замкнуту колію зі встановленими на ній з можливістю переміщення відкритими транспортними платформами, оснащеними турбінами барабанного типу з вертикальною віссю і сопловими апаратами, яка відрізняється тим, що на кожній транспортній платформі на одній вертикальній осі розміщені щонайменше дві з'єднані між собою турбіни, які мають неоднакові розміри діаметра барабанів і неоднакову кількість лопатей,...
Попередній патент: Гетерополіциклічні сполуки та їх застосування як метаботропічних антагоністів рецепторів глутамату, фармацевтична композиція на їх основі
Наступний патент: Спосіб термічного знешкодження отрутохімікатів
Випадковий патент: Пристрій червоного і інфрачервоного випромінювання портативний