Процес відокремлення корисного вантажу і пристрій для його здійснення
Номер патенту: 84845
Опубліковано: 10.12.2008
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович

Формула / Реферат
1. Спосіб відокремлення корисного вантажу при його запуску ракетно-космічним носієм на орбіту із заданими параметрами, який включає виведення на орбіту, повороти носія для забезпечення потрібного напрямку відокремлення корисного вантажу і його відокремлення в цьому напрямку, який відрізняється тим, що під час виведення на орбіту проводять виміри навігаційних параметрів носія, на їх основі прогнозують момент відокремлення корисного вантажу і визначають на цей момент вектори часткових похідних ![]() заданих орбітальних параметрів
заданих орбітальних параметрів ![]() , де
, де ![]() - кількість параметрів,
- кількість параметрів, ![]() - вектор швидкості, визначають значення кутів орієнтації в прийнятій системі координат
- вектор швидкості, визначають значення кутів орієнтації в прийнятій системі координат ![]() напрямку відокремлення корисного вантажу
напрямку відокремлення корисного вантажу ![]() як такі, що надають мінімум сумі
як такі, що надають мінімум сумі ![]() , де
, де ![]() - вектор ваги орбітальних параметрів відповідно до їхнього впливу на загальну ефективність виконання цільових задач корисного вантажу, (,) - позначення скалярного добутку векторів, формують траєкторію руху носія з урахуванням додаткових умов забезпечення відокремлення корисного вантажу у напрямку
- вектор ваги орбітальних параметрів відповідно до їхнього впливу на загальну ефективність виконання цільових задач корисного вантажу, (,) - позначення скалярного добутку векторів, формують траєкторію руху носія з урахуванням додаткових умов забезпечення відокремлення корисного вантажу у напрямку ![]() на момент видачі команди на це та відокремлюють його у цьому напрямку в кінці польоту.
на момент видачі команди на це та відокремлюють його у цьому напрямку в кінці польоту.
2. Спосіб за п. 1, який відрізняється тим, що корисний вантаж відокремлюють у напрямку, який визначають як ![]() , де
, де ![]() - позначення операції вибору аргументів,
- позначення операції вибору аргументів, ![]() - операція пошуку мінімуму функції, що у дужках, за аргументами
- операція пошуку мінімуму функції, що у дужках, за аргументами ![]() ,
, ![]() - операція вибору максимального елемента із перелічених в дужках.
- операція вибору максимального елемента із перелічених в дужках.
3. Спосіб за пп. 1, 2, який відрізняється тим, що додатково вимірюють, визначають та прогнозують похибку по швидкості системи орієнтації та стабілізації на момент відокремлення корисного вантажу ![]() і, якщо її проекції на осі системи координат в площині дії цієї похибки не більше похибки по швидкості внаслідок власне процесу відокремлення вантажу
і, якщо її проекції на осі системи координат в площині дії цієї похибки не більше похибки по швидкості внаслідок власне процесу відокремлення вантажу ![]() , то корисний вантаж відокремлюють у зазначеному у п. 1 або 2 напрямку
, то корисний вантаж відокремлюють у зазначеному у п. 1 або 2 напрямку ![]() , інакше повертають носій до суміщення площини дії
, інакше повертають носій до суміщення площини дії ![]() з площиною, яка проходить через вектори
з площиною, яка проходить через вектори ![]() та
та ![]() , після чого відокремлюють корисний вантаж.
, після чого відокремлюють корисний вантаж.
4. Спосіб за пп. 1-3, який відрізняється тим, що додатково вводять в систему керування задану точність виведення корисного вантажу ![]() та значення складових точності, на основі навігаційних вимірювань прогнозують точність виведення на момент видачі команди на відокремлення без урахування складової за рахунок власне процесу відокремлення
та значення складових точності, на основі навігаційних вимірювань прогнозують точність виведення на момент видачі команди на відокремлення без урахування складової за рахунок власне процесу відокремлення ![]() , компоненти вектора ваг визначають як
, компоненти вектора ваг визначають як ![]() , де
, де ![]() - коефіцієнт вагомості.
- коефіцієнт вагомості.
5. Спосіб за пп. 1-3, який відрізняється тим, що компоненти вектора ваг визначають як ![]() .
.
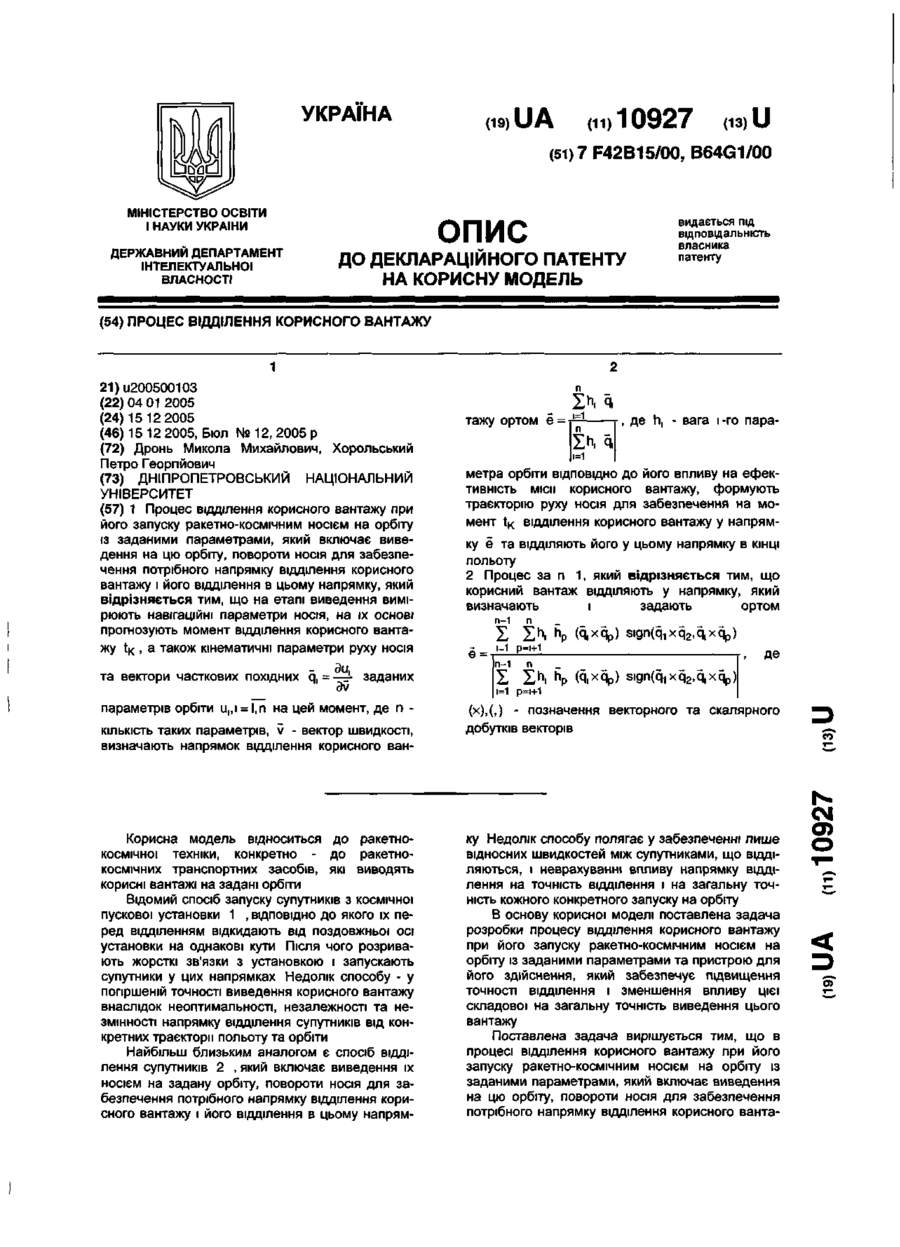
6. Пристрій для здійснення способу відокремлення корисного вантажу, який включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабілізації, який відрізняється тим, що в нього додатково введені блок пам'яті, блок прогнозу кінцевих параметрів траєкторії, блок прогнозу похибок виведення, блок визначення похідних, блок розрахунку критеріальної функції, блок оптимізації та блок визначення напрямку відокремлення корисного вантажу, причому блок пам'яті з'єднаний з блоком прогнозу кінцевих параметрів траєкторії, блоком прогнозу похибок виведення, блоком розрахунку критеріальної функції та блоком оптимізації, блок навігації додатково з'єднаний з блоком прогнозу похибок виведення, блок формування траєкторії додатково з'єднаний з блоком прогнозу кінцевих параметрів траєкторії та блоком визначення напрямку відокремлення корисного вантажу, блок прогнозу кінцевих параметрів траєкторії з'єднаний ще з блоком визначення похідних, блоком прогнозу похибок виведення та блоком оптимізації, блок визначення похідних з'єднаний ще з блоком розрахунку критеріальної функції, блок прогнозу похибок виведення з'єднаний ще з блоком розрахунку критеріальної функції та блоком визначення напрямку відокремлення корисного вантажу, блок розрахунку критеріальної функції з'єднаний ще з блоком оптимізації, блок оптимізації з'єднаний ще з блоком визначення напрямку відокремлення корисного вантажу.
7. Пристрій за п. 6, який відрізняється тим, що блок системи орієнтації та стабілізації додатково з'єднаний з блоком прогнозу похибок виведення.
Текст
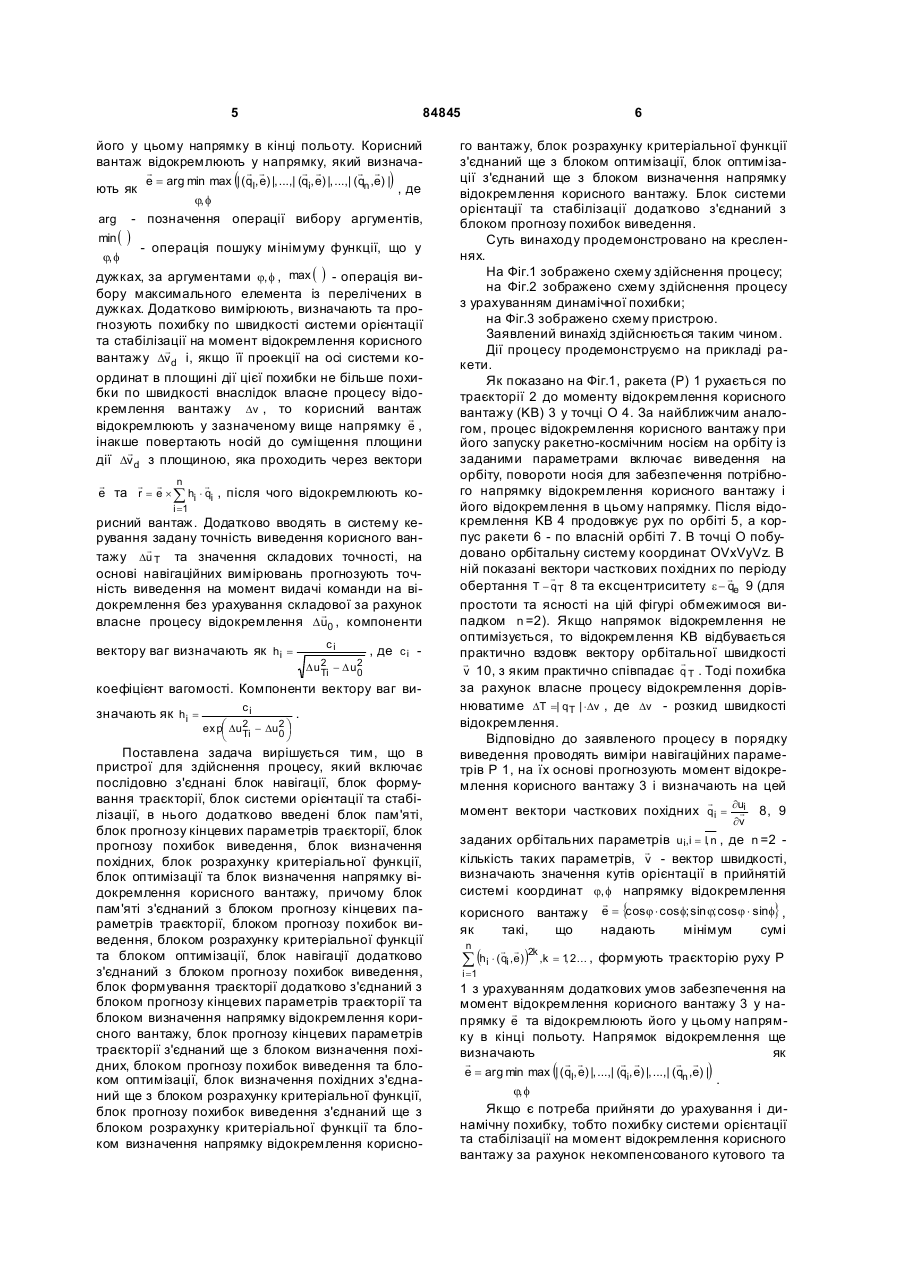
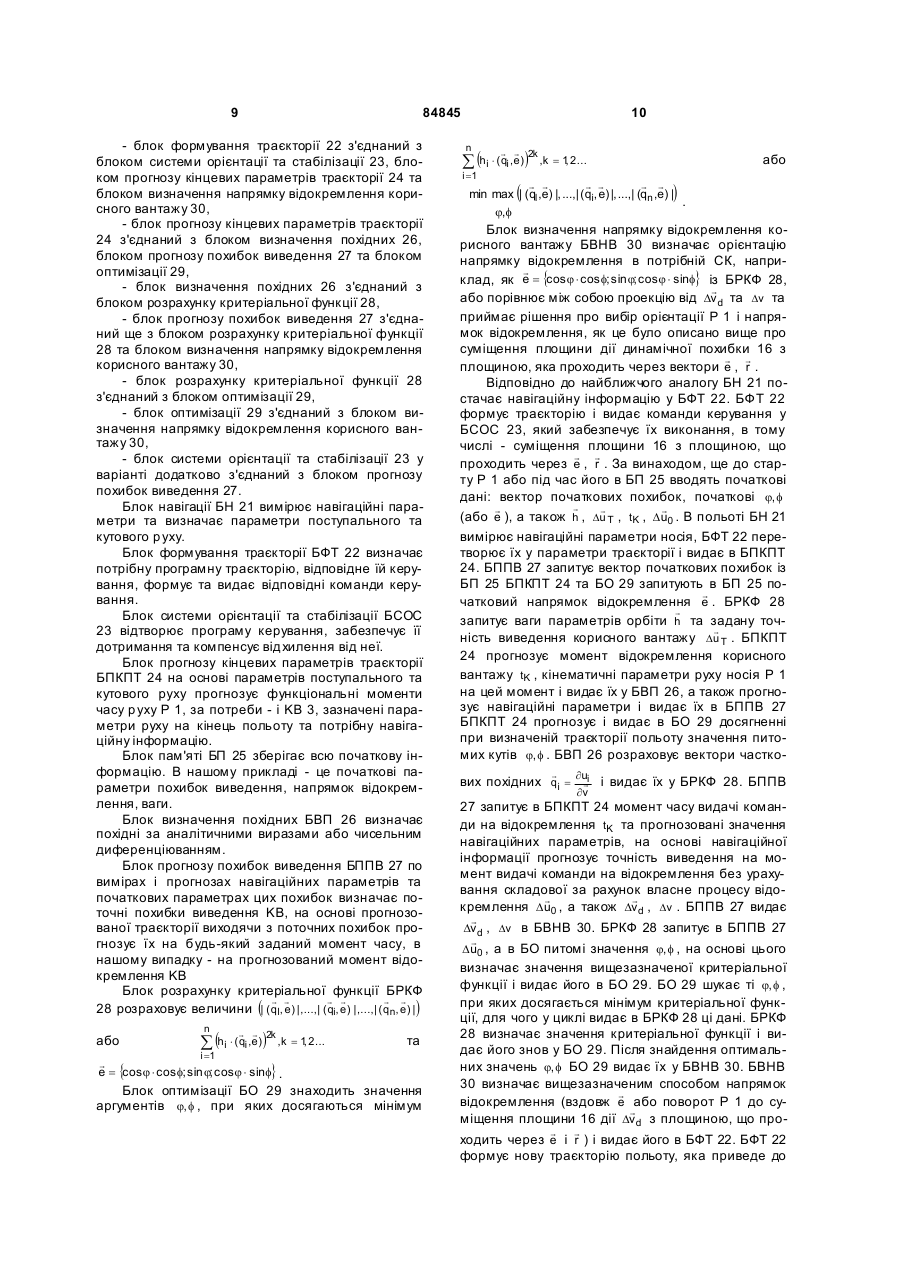
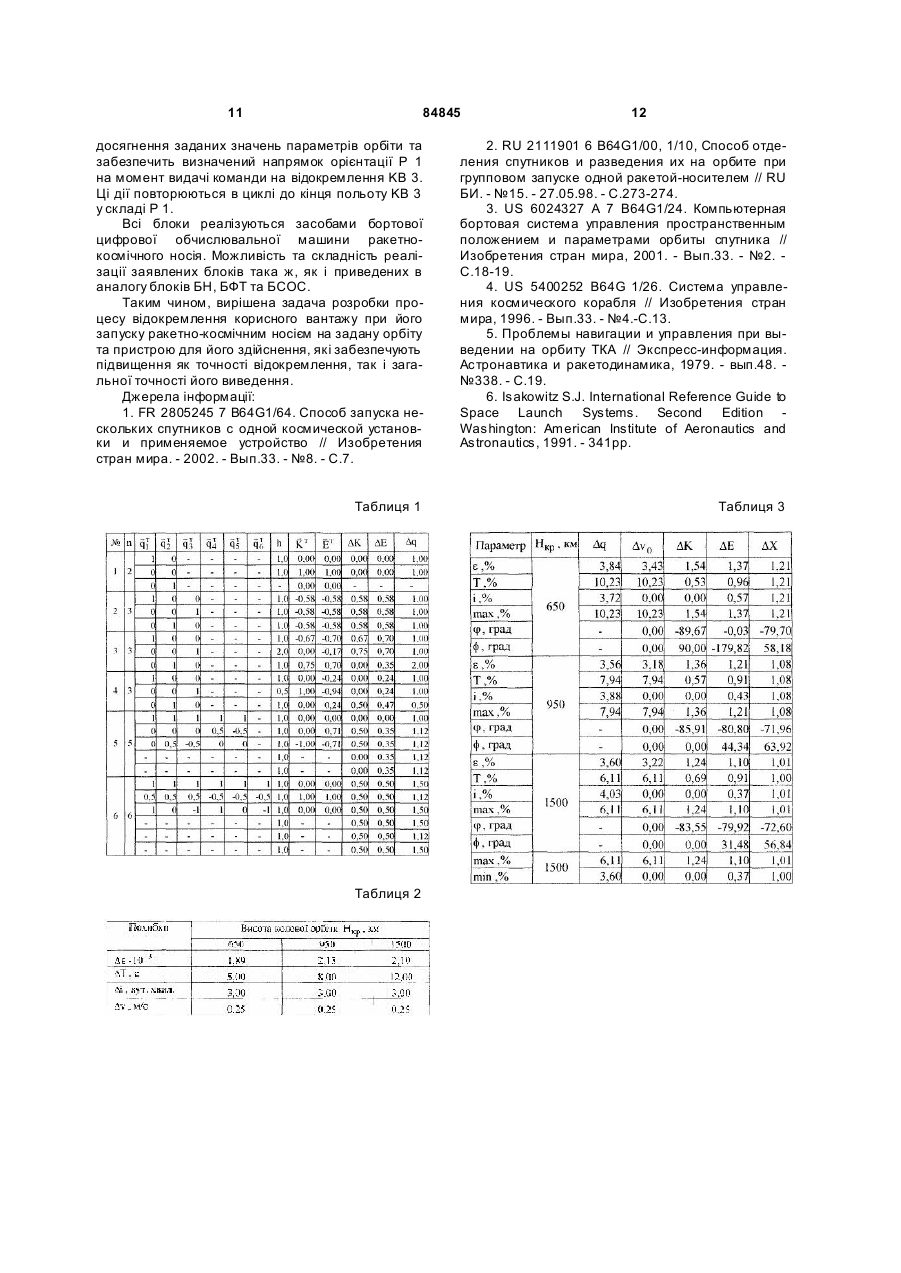
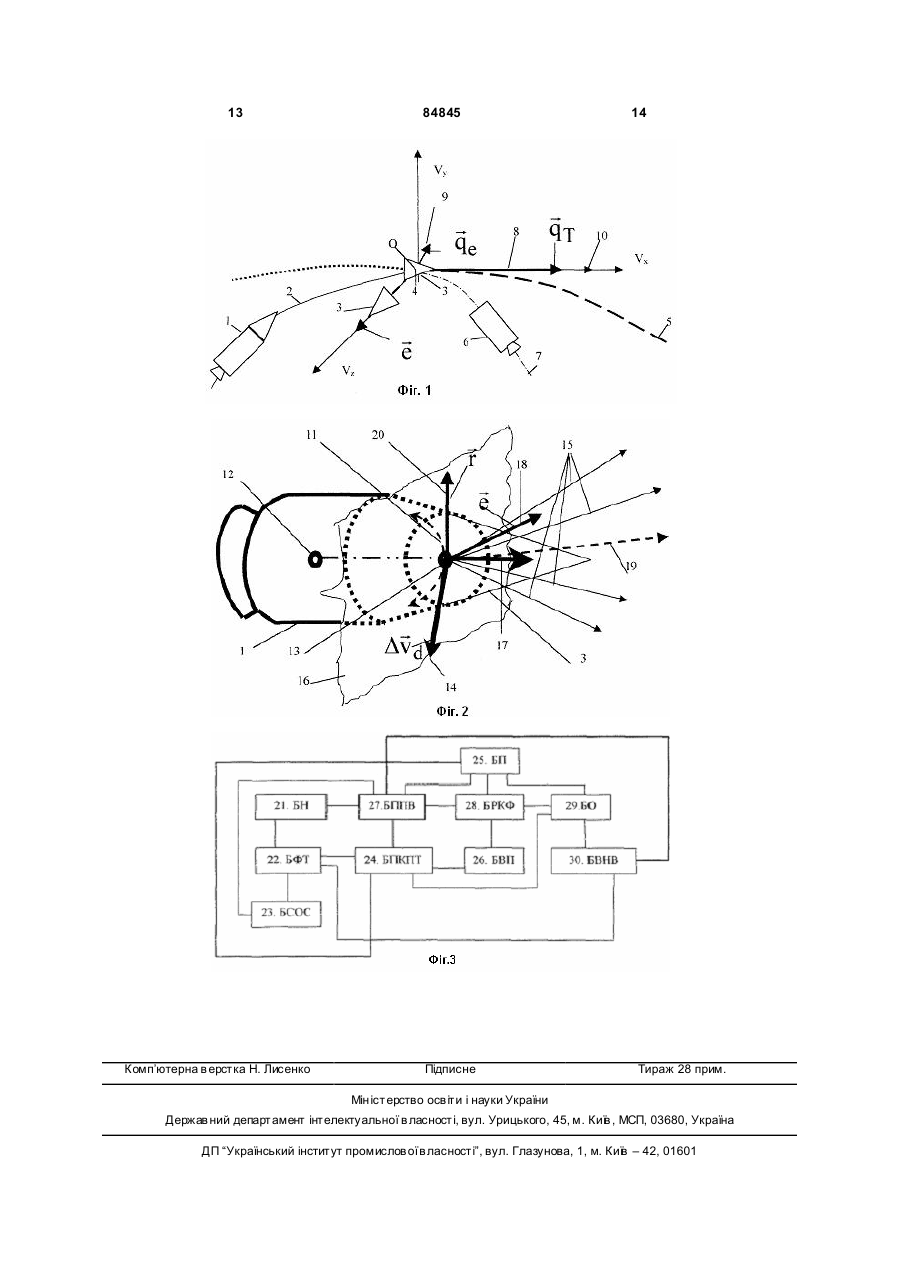
1. Спосіб відокремлення корисного вантажу в площині дії цієї похибки не більше похибки по при його запуску ракетно-космічним носієм на оршвидкості внаслідок власне процесу відокремленбіту із заданими параметрами, який включає вивеня вантажу D v , то корисний вантаж відокремлюдення на орбіту, повороти носія для забезпечення r ють у зазначеному у п.1 або 2 напрямку e , інакше потрібного напрямку відокремлення корисного r повертають носій до суміщення площини дії Dv d з вантажу і його відокремлення в цьому напрямку, r який відрізняється тим, що під час виведення на площиною, яка проходить через вектори e та орбіту проводять виміри навігаційних параметрів r r n r носія, на їх основі прогнозують момент відокремr = e ´ å hi × qi , після чого відокремлюють корисний лення корисного вантажу і визначають на цей моi= 1 r вантаж. ¶ui мент вектори часткових похідних qi = r заданих 4. Спосіб за пп.1-3, який відрізняється тим, що ¶v додатково вводять в систему керування задану орбітальних параметрів ui,i = l, n , де n - кількість r r точність виведення корисного вантажу DuT та параметрів, v - вектор швидкості, визначають значення складових точності, на основі навігаційзначення кутів орієнтації в прийнятій системі коорних вимірювань прогнозують точність виведення динат j, f напрямку відокремлення корисного ванна момент видачі команди на відокремлення без r тажу e = {cos j × cos f;sin j;cos j × sinf} як такі, що наурахування складової за рахунок власне процесу r n r відокремлення Du0 , компоненти вектора ваг виr r дають мінімум сумі å (hi × ( qi, e) )2k , k = 1, 2... , де h = {hi} ci i =1 значають як hi = , де c i - коефіцієнт 2 - D u2 - вектор ваги орбітальних параметрів відповідно D uTi 0 до їхнього впливу на загальну ефективність виковагомості. нання цільових задач корисного вантажу, (,) - по5. Спосіб за пп.1-3, який відрізняється тим, що значення скалярного добутку векторів, формують компоненти вектора ваг визначають як траєкторію руху носія з урахуванням додаткових ci умов забезпечення відокремлення корисного ванhi = . r тажу у напрямку e на момент видачі команди на expæ Du2 - Du2 ö ç Ti 0÷ C2 2 (19) 1 3 84845 4 6. Пристрій для здійснення способу відокремлення корисного вантажу, який включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабілізації, який відрізняється тим, що в нього додатково введені блок пам'яті, блок прогнозу кінцевих параметрів траєкторії, блок прогнозу похибок виведення, блок визначення похідних, блок розрахунку критеріальної функції, блок оптимізації та блок визначення напрямку відокремлення корисного вантажу, причому блок пам'яті з'єднаний з блоком прогнозу кінцевих параметрів траєкторії, блоком прогнозу похибок виведення, блоком розрахунку критеріальної функції та блоком оптимізації, блок навігації додатково з'єднаний з блоком прогнозу похибок виведення, блок формування траєкторії додатково з'єднаний з блоком прогнозу кінцевих параметрів траєкторії та блоком визначення напрямку відокремлення корисного вантажу, блок прогнозу кінцевих параметрів траєкторії з'єднаний ще з блоком визначення похідних, блоком прогнозу похибок виведення та блоком оптимізації, блок визначення похідних з'єднаний ще з блоком розрахунку критеріальної функції, блок прогнозу похибок виведення з'єднаний ще з блоком розрахунку критеріальної функції та блоком визначення напрямку відокремлення корисного вантажу, блок розрахунку критеріальної функції з'єднаний ще з блоком оптимізації, блок оптимізації з'єднаний ще з блоком визначення напрямку відокремлення корисного вантажу. 7. Пристрій за п.6, який відрізняється тим, що блок системи орієнтації та стабілізації додатково з'єднаний з блоком прогнозу похибок виведення. Винахід належить до ракетно-космічної техніки, конкретно - до ракетно-космічних транспортних засобів, які виводять корисні вантажі на задані орбіти. Відомий спосіб запуску супутників з космічної пускової установки [1], відповідно до якого їх перед відокремленням відкидають від поздовжньої осі установки на однакові кути. Після чого розривають жорсткі зв'язки з установкою і запускають суп утники у ци х напрямках. Недолік способу - у погіршеній точності виведення корисного вантажу внаслідок неоптимальності, незалежності та незмінності напрямку відокремлення супутників від конкретних траєкторії польоту та орбіти. Найбільш близьким аналогом є спосіб відокремлення супутників [2], який включає виведення їх носієм на задану орбіту, повороти носія для забезпечення потрібного напрямку відокремлення корисного вантажу і його відокремлення в цьому напрямку. Недолік способу полягає у забезпеченні лише відносних швидкостей між супутниками, що відділяються, і неврахуванні впливу напрямку відокремлення на точність відокремлення і на загальну точність кожного конкретного запуску на орбіту. Відома комп'ютерна бортова система керування просторовим положенням і параметрами орбіти супутника [3] з блоками контролю орбіти, керування траєкторією польоту та визначення режимів роботи, а також датчиками та приводами. Ця система забезпечує піддержання просторового положення і параметрів орбіти супутника. Недоліками цієї системи є те, що вона не впливає на вибір напрямку відокремлення супутника і не контролює його точність запуску на орбіту. Відома також система керування космічним кораблем [4], яка складається з блока керування ракетними двигунами, обчислювача, блока стабілізації, датчика для вимірювання орбітальної швидкості. Недоліки цього рішення співпадають з вищенаведеними для [3]. Найбільш близьким аналогом є система [5], яка включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабілізації. Недоліком цього рішення є відсутність засобів знаходження оптимального напрямку відокремлення корисного вантажу та формування відповідної траєкторії. В основу винаходу поставлена задача розробки способу відокремлення корисного вантажу при його запуску ракетно-космічним носієм на орбіту із заданими параметрами та пристрою для його здійснення, який забезпечує підвищення точності відокремлення і зменшення впливу складової за рахунок власне відокремлення та похибки системи орієнтації та стабілізації на загальну точність виведення цього вантажу. Поставлена задача вирішується тим, що в способі відокремлення корисного вантажу при його запуску ракетно-космічним носієм на орбіту із заданими параметрами, який включає виведення на орбіту, повороти носія для забезпечення потрібного напрямку відокремлення корисного вантажу і його відокремлення в цьому напрямку, в порядку виведення проводять виміри навігаційних параметрів носія, на їх основі прогнозують момент відокремлення корисного вантажу і визначають на цей r момент вектори часткових похідних qi = ¶ui задаr ¶v них орбітальних параметрів u i,i = l, n , де n - кільr кість таких параметрів, v - вектор швидкості, визначають значення кутів орієнтації в прийнятій системі координат j, f напрямку відокремлення r корисного вантажу e = {cos j × cos f; sin j; cos j × sinf} , як такі, що надають мінімум сумі n r r r 2k = 1 2... , де h = {h i} - вектор ваг орбі,k , å (hi × ( qi ,e) ) = 1 i тальних параметрів відповідно до їхнього впливу на загальну ефективність виконання цільових задач корисного вантажу, (,) - позначення скалярного добутку векторів, формують траєкторію руху носія з урахуванням додаткових умов забезпеченr ня відокремлення корисного вантажу у напрямку e на момент видачі команди на це та відокремлюють 5 84845 його у цьому напрямку в кінці польоту. Корисний вантаж відокремлюють у напрямку, який визначають як arg min ( j, f ) ( ) r r r r r r r e = arg min max | ( ql, e) |, ...,| (qi, e) |, ...,| ( qn ,e) | , де j, f - позначення операції вибору аргументів, - операція пошуку мінімуму функції, що у дужках, за аргументами j, f , max ( ) - операція вибору максимального елемента із перелічених в дужках. Додатково вимірюють, визначають та прогнозують похибку по швидкості системи орієнтації та стабілізації на момент відокремлення корисного r вантажу Dv d і, якщо її проекції на осі системи координат в площині дії цієї похибки не більше похибки по швидкості внаслідок власне процесу відокремлення вантажу Dv , то корисний вантаж r відокремлюють у зазначеному вище напрямку e , інакше повертають носій до суміщення площини r дії Dv d з площиною, яка проходить через вектори r r r n r e та r = e ´ å hi × qi , після чого відокремлюють коi= 1 рисний вантаж. Додатково вводять в систему керування задану точність виведення корисного ванr тажу Du T та значення складових точності, на основі навігаційних вимірювань прогнозують точність виведення на момент видачі команди на відокремлення без урахування складової за рахунок r власне процесу відокремлення Du0 , компоненти вектору ваг визначають як hi = ci D u2 - D u2 Ti 0 , де c i коефіцієнт вагомості. Компоненти вектору ваг визначають як hi = ci . æ Du2 - Du2 ö expç Ti ÷ 0ø è 6 го вантажу, блок розрахунку критеріальної функції з'єднаний ще з блоком оптимізації, блок оптимізації з'єднаний ще з блоком визначення напрямку відокремлення корисного вантажу. Блок системи орієнтації та стабілізації додатково з'єднаний з блоком прогнозу похибок виведення. Суть винаходу продемонстровано на кресленнях. На Фіг.1 зображено схему здійснення процесу; на Фіг.2 зображено схему здійснення процесу з урахуванням динамічної похибки; на Фіг.3 зображено схему пристрою. Заявлений винахід здійснюється таким чином. Дії процесу продемонструємо на прикладі ракети. Як показано на Фіг.1, ракета (Р) 1 рухається по траєкторії 2 до моменту відокремлення корисного вантажу (KB) 3 у точці О 4. За найближчим аналогом, процес відокремлення корисного вантажу при його запуску ракетно-космічним носієм на орбіту із заданими параметрами включає виведення на орбіту, повороти носія для забезпечення потрібного напрямку відокремлення корисного вантажу і його відокремлення в цьому напрямку. Після відокремлення KB 4 продовжує рух по орбіті 5, а корпус ракети 6 - по власній орбіті 7. В точці О побудовано орбітальну систему координат OVxVyVz. В ній показані вектори часткових похідних по періоду r r обертання T - qT 8 та ексцентриситету e - qe 9 (для простоти та ясності на цій фігурі обмежимося випадком n =2). Якщо напрямок відокремлення не оптимізується, то відокремлення KB відбувається практично вздовж вектору орбітальної швидкості r r v 10, з яким практично співпадає q T . Тоді похибка за рахунок власне процесу відокремлення дорівнюватиме DT = | qT | × Dv , де Dv - розкид швидкості відокремлення. Відповідно до заявленого процесу в порядку виведення проводять виміри навігаційних параметрів Р 1, на їх основі прогнозують момент відокремлення корисного вантажу 3 і визначають на цей Поставлена задача вирішується тим, що в пристрої для здійснення процесу, який включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабіr момент вектори часткових похідних qi = ¶ui 8, 9 r лізації, в нього додатково введені блок пам'яті, ¶v блок прогнозу кінцевих параметрів траєкторії, блок заданих орбітальних параметрів u i,i = l, n , де n =2 прогнозу похибок виведення, блок визначення r кількість таких параметрів, v - вектор швидкості, похідних, блок розрахунку критеріальної функції, визначають значення кутів орієнтації в прийнятій блок оптимізації та блок визначення напрямку вісистемі координат j, f напрямку відокремлення докремлення корисного вантажу, причому блок r пам'яті з'єднаний з блоком прогнозу кінцевих пакорисного вантажу e = {cos j × cos f; sin j; cos j × sinf} , раметрів траєкторії, блоком прогнозу похибок вияк такі, що надають мінімум сумі ведення, блоком розрахунку критеріальної функції n r r 2k та блоком оптимізації, блок навігації додатково ,k å (hi × ( qi ,e) ) = 1, 2... , формують траєкторію руху Р з'єднаний з блоком прогнозу похибок виведення, = 1 i блок формування траєкторії додатково з'єднаний з 1 з урахуванням додаткових умов забезпечення на блоком прогнозу кінцевих параметрів траєкторії та момент відокремлення корисного вантажу 3 у наr блоком визначення напрямку відокремлення корипрямку e та відокремлюють його у цьому напрямсного вантажу, блок прогнозу кінцевих параметрів ку в кінці польоту. Напрямок відокремлення ще траєкторії з'єднаний ще з блоком визначення похівизначають як r r r r r r r дних, блоком прогнозу похибок виведення та бло= arg min max (| ( ql, e) |, ...,| (qi, e) |, ...,| ( qn ,e) |) e ком оптимізації, блок визначення похідних з'єдна. j, f ний ще з блоком розрахунку критеріальної функції, Якщо є потреба прийняти до урахування і диблок прогнозу похибок виведення з'єднаний ще з намічну похибку, тобто похибку системи орієнтації блоком розрахунку критеріальної функції та блота стабілізації на момент відокремлення корисного ком визначення напрямку відокремлення корисновантажу за рахунок некомпенсованого кутового та 7 84845 поступального руху, то додатково вимірюють, визначають та прогнозують цю похибку по швидкості r Dv d і, якщо її проекції на осі системи координат в площині дії цієї похибки не більше похибки по швидкості внаслідок власне процесу відокремлення вантажу Dv , то корисний вантаж відокремлюr ють у напрямку e , визначеному по одній із наведених вище відповідних формул. Інакше r повертають носій до суміщення площини дії Dv d з r площиною, яка проходить через вектори e n та r r r r = e ´ å hi × qi , як це показано на Фіг.2, після чого i= 1 8 Додатково вводять в систему керування задаr ну точність виведення корисного вантажу Du T та значення складових точності, на основі навігаційних вимірювань прогнозують точність виведення на момент видачі команди на відокремлення без урахування складової за рахунок власне процесу r відокремлення Du0 , компоненти вектору ваг визначають як hi = ci D u2 - D u2 Ti 0 , де c i - коефіцієнт вагомості. Компоненти вектору ваг визначають як hi = ci . expæ Du2 - Du2 ö ç Ti 0÷ è ø відокремлюють корисний вантаж. Так, на Фіг.2 зоДані таблиці 2 визначають заявлені похибки Р бражено Р 1 з KB 3. KB 3 здійснює некомпенсовані системою стабілізації та орієнтації коливальні рухи "Tsyklon" [6] в разі виведення KB на вказані там 11 навколо центру мас (ЦМ) 12 Р 1. Це приводить орбіти. До позначень додається "і" - нахилення до появи додаткової лінійної швидкості ЦМ 13 KB орбіти. 3. З урахуванням помилки по швидкості підсистем В таблиці 3 приведені дані про відносні до занормальної та бокової стабілізації (на схемі не явлених (в таблиці 2) похибки при відокремленні у r r r r r показано) з'я вляється Dv d 14. Система керування напрямках K , E , та X . Напрямок X визначають відповідно до польотом в даному разі формує траєкторію руху v r r r r r r r по досягненню чотирьох= arg min max (| ( ql ,e) |,...,| ( qi ,e) |,...,| ( qn , e) |) параметрів, відповідні = e X . Проr j,f вектори похідних по швидкості qi i = 1,4 , яких 15, зображені на Фіг.2. В показаному на Фіг.2 випадку мах Dv 0 відповідає відокремленню KB 3 вздовж r площина дії динамічної похибки 16 нормальна до вектора орбітальної швидкості V 10. На цій Фіг.5 поздовжньої осі Р 1, з якою співпадає, відносно введені ще позначення max , min - максимальне самої ракети, напрямок 17 відокремлення KB 3. та мінімальне значення з усіх відносних похибок. Площина дії динамічної похибки - це площина, ci дотична до поверхні, яку створює своїми коливанВаги визначалися як hi = , лише в 2 - D u2 нями ЦМ 13 KB 3 у зв'язаній системі координат D uTi r 0 (СК), а орієнтація Dv d в ній рівномірно розподілеci останніх двох рядках як hi= . на в діапазоні 0-360°, сама ж похибка в момент æ ö expç Du2 - Du2 ÷ відокремлення проявляється вже як імпульс швидTi 0ø è кості випадкової величини і напрямку. Останнє визначення ваг відповідає можливості r Якщо, повторимося, проекція Dv d на осі СК не перевищення прогнозованих похибок над потріббільше Dv , KB 3 буде відокремлюватися у напряними або заявленими. r Таку стратегію руху дозволяє відтворити примку e 18, для чого потрібно повернути поздовжню стрій для реалізації процесу, показаний на Фіг.3. вісь, яка співпадає з 17, в цю орієнтацію. Інакше Він включає: n r r визначають сумарний вектор похідних Q = å hi × qi - блок навігації (БН) 21, i= 1 - блок формування траєкторії (БФТ) 22, - блок системи орієнтації та стабілізації r r n r 19 і допоміжний ний вектор r = e ´ å hi × qi 20. Ви(БСОС) 23, i= 1 - блок прогнозу кінцевих параметрів траєкторії значають площину, яка проходить через вектори (БПКПТ) 24, r r e 18 та r 20, і суміщають з нею площину дії ди- блок пам'яті (БП) 25, намічної похибки 16. Оскільки в нашому випадку ці - блок визначення похідних (БВП) 26, площини співпадають, то додаткові повороти не - блок прогнозу похибок виведення (БГТПВ) потрібні і KB 3 відокремлюють у напрямку 17, який 27, перпендикулярний до площини 16. - блок розрахунку критеріальної функції В таблиці 1 представлено 6 модельних при(БРКФ) 28, r r - блок оптимізації (БО) 29, кладів векторів похідних q та ваги h до них. В ній r r - блок визначення напрямку відокремлення присутні також дані про напрямки K , E , оптимакорисного вантажу (БВНВ) 30. n r r В пристрої між блоками введені такі зв'язки: льні за функціями å (hi × ( qi, e)) m , m =2, 4 відповід- блок пам'яті 25 з'єднаний з блоком прогнозу i =1 кінцевих параметрів траєкторії 24, блоком прогноно. В таблиці 1 наведені також очікувані промахи зу похибок виведення 27, блоком розрахунку крипри відокремленні у ци х напрямках DK , DE і у разі теріальної функції 28 та блоком оптимізації 29, відокремлення KB у напрямку тільки однієї із за- блок навігації 21 з'єднаний з блоком формузначених похідних Dq . вання траєкторії 22 та блоком прогнозу похибок виведення 27, 9 84845 - блок формування траєкторії 22 з'єднаний з блоком системи орієнтації та стабілізації 23, блоком прогнозу кінцевих параметрів траєкторії 24 та блоком визначення напрямку відокремлення корисного вантажу 30, - блок прогнозу кінцевих параметрів траєкторії 24 з'єднаний з блоком визначення похідних 26, блоком прогнозу похибок виведення 27 та блоком оптимізації 29, - блок визначення похідних 26 з'єднаний з блоком розрахунку критеріальної функції 28, - блок прогнозу похибок виведення 27 з'єднаний ще з блоком розрахунку критеріальної функції 28 та блоком визначення напрямку відокремлення корисного вантажу 30, - блок розрахунку критеріальної функції 28 з'єднаний з блоком оптимізації 29, - блок оптимізації 29 з'єднаний з блоком визначення напрямку відокремлення корисного вантажу 30, - блок системи орієнтації та стабілізації 23 у варіанті додатково з'єднаний з блоком прогнозу похибок виведення 27. Блок навігації БН 21 вимірює навігаційні параметри та визначає параметри поступального та кутового р уху. Блок формування траєкторії БФТ 22 визначає потрібну програмну траєкторію, відповідне їй керування, формує та видає відповідні команди керування. Блок системи орієнтації та стабілізації БСОС 23 відтворює програму керування, забезпечує її дотримання та компенсує відхилення від неї. Блок прогнозу кінцевих параметрів траєкторії БПКПТ 24 на основі параметрів поступального та кутового руху прогнозує функціональні моменти часу р уху Р 1, за потреби - і KB 3, зазначені параметри руху на кінець польоту та потрібну навігаційну інформацію. Блок пам'яті БП 25 зберігає всю початкову інформацію. В нашому прикладі - це початкові параметри похибок виведення, напрямок відокремлення, ваги. Блок визначення похідних БВП 26 визначає похідні за аналітичними виразами або чисельним диференціюванням. Блок прогнозу похибок виведення БППВ 27 по вимірах і прогнозах навігаційних параметрів та початкових параметрах цих похибок визначає поточні похибки виведення KB, на основі прогнозованої траєкторії виходячи з поточних похибок прогнозує їх на будь-який заданий момент часу, в нашому випадку - на прогнозований момент відокремлення KB Блок розрахунку критеріальної функції БРКФ r r r r r r 28 розраховує величини (| ( ql, e) |,...,| ( qi, e) |,...,| ( qn, e) |) або r = e n å (hi × ( qi ,e) ) r r 2k ,k = 1 2... , та i =1 {cosj × cosf; sin j; cosj × sinf} . Блок оптимізації БО 29 знаходить значення аргументів j, f , при яких досягаються мінімум 10 n å (hi × ( qi ,e) ) i =1 r r 2k або ,k = 1 2... , ( ) r r r r r r min max | ( ql ,e) |, ...,| ( qi, e) |, ...,| (qn ,e) | . j,f Блок визначення напрямку відокремлення корисного вантажу БВНВ 30 визначає орієнтацію напрямку відокремлення в потрібній СК, наприr клад, як e = {cos j × cos f; sin j; cos j × sinf} із БРКФ 28, r або порівнює між собою проекцію від Dv d та Dv та приймає рішення про вибір орієнтації Р 1 і напрямок відокремлення, як це було описано вище про суміщення площини дії динамічної похибки 16 з r r площиною, яка проходить через вектори e , r . Відповідно до найближчого аналогу БН 21 постачає навігаційну інформацію у БФТ 22. БФТ 22 формує траєкторію і видає команди керування у БСОС 23, який забезпечує їх виконання, в тому числі - суміщення площини 16 з площиною, що r r проходить через e , r . За винаходом, ще до старту Р 1 або під час його в БП 25 вводять початкові дані: вектор початкових похибок, початкові j, f r r r r (або e ), а також h , Du T , tK , Du0 . В польоті БН 21 вимірює навігаційні параметри носія, БФТ 22 перетворює їх у параметри траєкторії і видає в БПКПТ 24. БППВ 27 запитує вектор початкових похибок із БП 25 БПКПТ 24 та БО 29 запитують в БП 25 поr чатковий напрямок відокремлення e . БРКФ 28 r запитує ваги параметрів орбіти h та задану точr ність виведення корисного вантажу Du T . БПКПТ 24 прогнозує момент відокремлення корисного вантажу tK , кінематичні параметри руху носія Р 1 на цей момент і видає їх у БВП 26, а також прогнозує навігаційні параметри і видає їх в БППВ 27 БПКПТ 24 прогнозує і видає в БО 29 досягненні при визначеній траєкторії польоту значення питомих кутів j, f . БВП 26 розраховує вектори часткоr вих похідних qi = ¶ui і видає їх у БРКФ 28. БППВ r ¶v 27 запитує в БПКПТ 24 момент часу видачі команди на відокремлення tK та прогнозовані значення навігаційних параметрів, на основі навігаційної інформації прогнозує точність виведення на момент видачі команди на відокремлення без урахування складової за рахунок власне процесу відоr r кремлення Du0 , а також Dv d , Dv . БППВ 27 видає r Dv d , Dv в БВНВ 30. БРКФ 28 запитує в БППВ 27 r D u0 , а в БО питомі значення j, f , на основі цього визначає значення вищезазначеної критеріальної функції і видає його в БО 29. БО 29 шукає ті j, f , при яких досягається мінімум критеріальної функції, для чого у циклі видає в БРКФ 28 ці дані. БРКФ 28 визначає значення критеріальної функції і видає його знов у БО 29. Після знайдення оптимальних значень j, f БО 29 видає їх у БВНВ 30. БВНВ 30 визначає вищезазначеним способом напрямок r відокремлення (вздовж e або поворот Р 1 до суr міщення площини 16 дії Dv d з площиною, що проr r ходить через e і r ) і видає його в БФТ 22. БФТ 22 формує нову траєкторію польоту, яка приведе до 11 84845 12 досягнення заданих значень параметрів орбіти та забезпечить визначений напрямок орієнтації Р 1 на момент видачі команди на відокремлення KB 3. Ці дії повторюються в циклі до кінця польоту KB 3 у складі Р 1. Всі блоки реалізуються засобами бортової цифрової обчислювальної машини ракетнокосмічного носія. Можливість та складність реалізації заявлених блоків така ж, як і приведених в аналогу блоків БН, БФТ та БСОС. Таким чином, вирішена задача розробки процесу відокремлення корисного вантажу при його запуску ракетно-космічним носієм на задану орбіту та пристрою для його здійснення, які забезпечують підвищення як точності відокремлення, так і загальної точності його виведення. Джерела інформації: 1. FR 2805245 7 B64G1/64. Способ запуска нескольких спутников с одной космической установки и применяемое устройство // Изобретения стран мира. - 2002. - Вып.33. - №8. - С.7. 2. RU 2111901 6 B64G1/00, 1/10, Способ отделения спутников и разведения их на орбите при групповом запуске одной ракетой-носителем // RU БИ. - №15. - 27.05.98. - С.273-274. 3. US 6024327 А 7 В64G1/24. Компьютерная бортовая система управления пространственным положением и параметрами орбиты спутника // Изобретения стран мира, 2001. - Вып.33. - №2. С.18-19. 4. US 5400252 В64G 1/26. Система управления космического корабля // Изобретения стран мира, 1996. - Вып.33. - №4.-С.13. 5. Проблемы навигации и управления при выведении на орбиту ТКА // Экспресс-информация. Астронавтика и ракетодинамика, 1979. - вып.48. №338. - С.19. 6. Isakowitz S.J. International Reference Guide to Space Launch Systems. Second Edition Washington: American Institute of Aeronautics and Astronautics, 1991. - 341pp. Таблиця 1 Таблиця 3 Таблиця 2 13 Комп’ютерна в ерстка Н. Лисенко 84845 Підписне 14 Тираж 28 прим. Міністерство осв іт и і науки України Держав ний департамент інтелектуальної в ласності, вул. Урицького, 45, м. Київ , МСП, 03680, Україна ДП “Український інститут промислов ої в ласності”, вул. Глазунова, 1, м. Київ – 42, 01601
ДивитисяДодаткова інформація
Назва патенту англійськоюProcess and device of separation of payload
Автори англійськоюDron Mykola Mykhailovych, Khorolskyi Petro Heorhiiovych
Назва патенту російськоюПроцесс отделения полезного груза и устройство для его осуществления
Автори російськоюДронь Николай Михайлович, Хорольский Петр Георгиевич
МПК / Мітки
Мітки: пристрій, відокремлення, здійснення, вантажу, процес, корисного
Код посилання
<a href="https://ua.patents.su/7-84845-proces-vidokremlennya-korisnogo-vantazhu-i-pristrijj-dlya-jjogo-zdijjsnennya.html" target="_blank" rel="follow" title="База патентів України">Процес відокремлення корисного вантажу і пристрій для його здійснення</a>
Процес відділення корисного вантажу
Номер патенту: 10927
Опубліковано: 15.12.2005
Автори: Хорольський Петро Георгійович, Дронь Микола Михайлович
МПК: B64G 1/00, F42B 15/00
Мітки: відділення, корисного, вантажу, процес
Формула / Реферат:
1. Процес відділення корисного вантажу при його запуску ракетно-космічним носієм на орбіту із заданими параметрами, який включає виведення на цю орбіту, повороти носія для забезпечення потрібного напрямку відділення корисного вантажу і його відділення в цьому напрямку, який відрізняється тим, що на етапі виведення вимірюють навігаційні параметри носія, на їх основі прогнозують момент відділення корисного вантажу
Обшивка корисного вантажу
Номер патенту: 70304
Опубліковано: 15.10.2004
Автор: Уелі Віланд
МПК: B64G 1/22, F42B 15/36
Мітки: корисного, обшивка, вантажу
Формула / Реферат:
1. Обшивка корисного вантажу, призначеного для транспортування за допомогою ракети-носія, яка має форму поверхні тіла обертання і виконана з можливістю поділу за допомогою системи поділу уздовж принаймні однієї площини поділу на принаймні два подовжні сегменти, що мають можливість відділятися в бічні сторони від частини ракети-носія, що залишилася, причому обшивка має виконаний з двох половин носовий обтічник, що утворює її передню частину,...
Спосіб управління авіаційно-космічною системою для виведення корисного вантажу
Номер патенту: 56365
Опубліковано: 15.05.2003
Автори: Ковалєвскій Міхаіл Марковіч, Карпов Анатолій Стєпановіч, Рачук Владімір Сєргєєвіч, Монахов Юрій Владіміровіч, Іванов Робєрт Константіновіч, Борісов Андрєй Владіміровіч
Мітки: вантажу, спосіб, виведення, управління, системою, авіаційно-космічною, корисного
Формула / Реферат:
1. Спосіб управління авіаційно-космічною системою для виведення корисного вантажу, який включає старт літака-носія 1 з ракетою-носієм 2 і корисним вантажем 3 на борту з аеродрому базування 4, його політ в район запуску РН 5, відділення і відставання ракети-носія 2 від літака-носія 1 з подальшим запуском ракети-носія 2 в задану точку траєкторії і відділенням корисного вантажу 3 від ракети-носія 2, який відрізняється тим, що на максимальному...
Система керування
Номер патенту: 11045
Опубліковано: 15.12.2005
Автори: Дронь Микола Михайлович, Хорольський Петро Георгійович
МПК: G06F 5/00, F42B 15/00, B64G 1/00
Формула / Реферат:
Система керування ракетно-космічним носієм для виведення корисного вантажу на орбіту із заданими параметрами, яка включає послідовно з'єднані блок навігації, блок формування траєкторії, блок системи орієнтації та стабілізації, яка відрізняється тим, що в неї додатково введені блок прогнозу траєкторії, блок пам'яті, блок визначення похідних та блок визначення напрямку відділення корисного вантажу, причому блок пам'яті та блок визначення...
Процес зміцнення і гідроізолювання грунтів та пристрій для його здійснення
Номер патенту: 70107
Опубліковано: 15.09.2004
Автори: Жалдак Денис Миколайович, Седлер Іван Кирилович, Савинков Генадій Костянтинович, Ружинський Олександр Львович, Наровлянський Юрій Григорович
МПК: E02D 19/00, E21D 11/10, E02D 17/20
Мітки: гідроізолювання, пристрій, здійснення, процес, грунтів, зміцнення
Формула / Реферат:
1. Процес зміцнення і гідроізолювання ґрунтів, що включає розташування і переміщення колони-ін'єктора поперек горизонтів ґрунту, закріплення простору в ґрунті навколо колони-ін'єктора, нагнітання в порожнину колони-ін'єктора тампонажного розчину, дію на горизонти ґрунту статичним тиском стовпа тампонажного розчину в колоні-ін'єкторі, генерування над стовпом розчину ударних хвиль, передавання енергії цих хвиль вздовж стовпа розчину, змінення...
Попередній патент: Спосіб одержання (меркаптоорганіл)алкоксисиланів
Випадковий патент: Спосіб лапароскопічної герніопластики при вентральних грижах